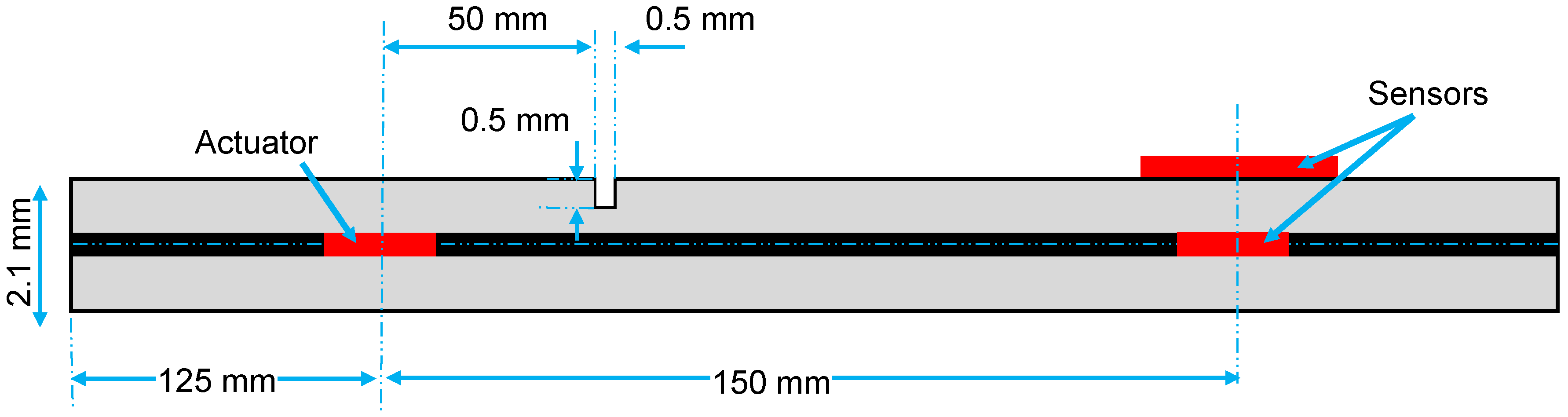
Experimental and numerical analyses were performed to study the actuation and sensing properties of d35 PZT transducers embedded within the bondline of laminate structures to actuate and sense ultrasonic waves. The test geometry used in both simulations and experiments consisted of two d35 PZTs sandwiched between two 1 mm thick aluminum sheets, which were bonded together with a layer of adhesive of Hysol EA 9394 epoxy (Bay Point, CA, USA). The aluminum sheets were machined to a 305 mm × 15 mm × 1 mm in size. The d35 PZTs were placed 130 mm apart with their polling direction aligned along the length. This layout was determined to avoid overlapping signals from reflection. The waveform signals obtained from the laminate specimen were compared with the FE voltage signals. Simulation was also used to perform a parametric study on the effects of varying the actuation frequency, and the length and thickness of d35 PZT transducers.
3.1. Experimental Approach
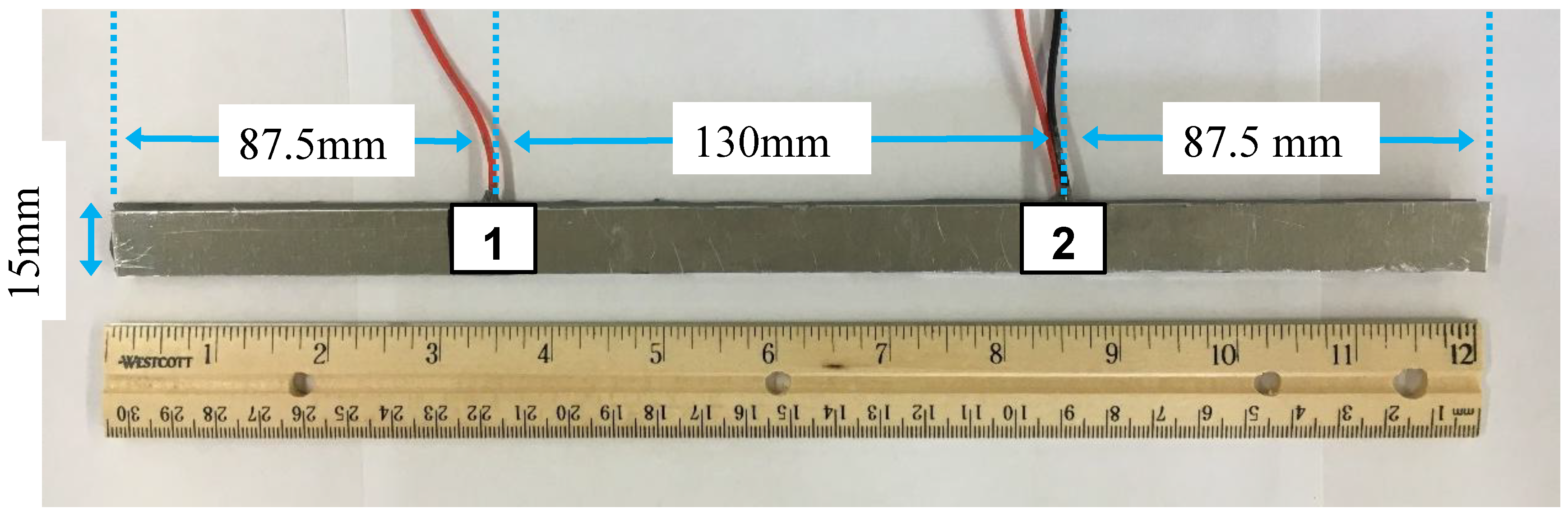
In this experiment, the laminate specimen was prepared as previously stated, consisting of two d35 PZTs sandwiched between two 6061-T6 aluminum sheets that were bonded together with a layer of adhesive. The aluminum sheets were machined to a 305 mm × 15 mm × 1 mm in size. The shear-mode d35 PZTs were adhered to one aluminum sheet that would serve as a common ground using Chemtronics CircuitWorks CW2400 conductive epoxy (Kennesaw, GA, USA) [
27]. The d35 PZTs were placed 130 mm apart with their polling direction aligned along the aluminum length. The same conductive epoxy was used to attach thin wires to the individual hot terminals of the PZTs. A fully prepared specimen consisting of the aluminum sheet with d35 PZTs and wiring are shown in
Figure 4. Hysol EA 9394 was then used to bond the aluminum sheets together [
28]. This epoxy also served as an insulator, protecting the hot terminals of the PZTs from shorting against the second aluminum plate. The adhesive thickness was controlled by placing 1 mm thick spacers on the short edges (vertical boundaries) and applying pressure on the specimen while curing. The adhesive layer thickness was measured after curing at 1 ± 0.2 mm. Both d35 PZTs were made of APC 850 piezoelectric ceramic material with properties given in [
25,
26].
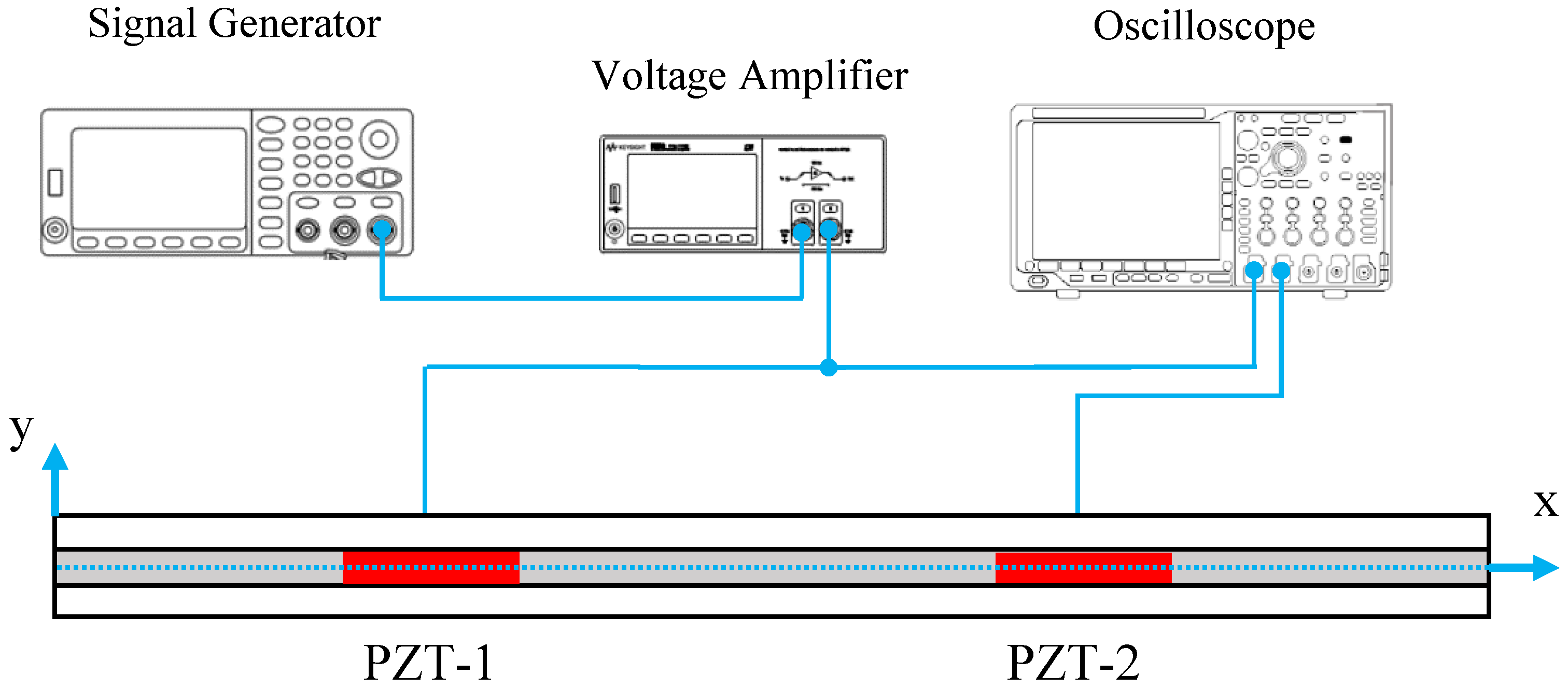
The experimental setup implemented to test the laminate specimen is shown in
Figure 5. The d35 PZT transducer labeled as PZT-1 was connected to a KEYSIGHT 33500B Series waveform generator [
29] and the output signal was amplified using a Krohn-Hite 7602M Wideband Amplifier (Brockton, MA, USA) [
30]. Also, both d35 PZTs were connected to a Tektronix MDO3014 Mixed Domain Oscilloscope [
31] to simultaneously record voltage signals across the actuator and the sensors. The specimen was tested in a pitch-catch configuration by actuating one PZT with a 5-peak Hanning windowed signal at different center frequencies.
3.2. Numerical Approach
Simulation of a laminate structure with internally embedded d35 PZTs provided insights into their actuation and sensing properties along with the wave propagation modes. A 2D numerical simulation was implemented to analyze the actuation and sensing properties of d35 PZT transducers embedded in the bondline of laminate structures. The piezoelectric properties of the transducers were simulated using multiphysics analyses that couple electric and mechanical fields simultaneously in the solution process. The numerical simulation was performed in ANSYS 17.0. The overall geometry of the laminate structure is the same as the laminate specimen shown in
Figure 4 for comparison purposes. The laminate structure consisted of two 6061-T6 aluminum sheets bonded together with Hysol EA9394 adhesive. Two 15 mm square d35 PZTs with 1 mm thickness were modeled in the bondline in a pitch-catch configuration to actuate and sense the propagating elastic waves in the structure. The material properties of the laminate structure components, including aluminum, adhesive, and PZT, are provided in
Table 2. The electromechanical behavior of the d35 PZTs was simulated using a coupled-field element, PLANE223. To accurately simulate the wave propagation, it is required to have a mesh size of at least 1/10 of the wavelength [
32]. Therefore, the element size of the couple-field elements and structural elements were set as 0.1 mm. The aluminum and the adhesive were modeled with a structural element, PLANE183. PZT-1 was simulated as an actuator and PZT-2 as a sensor through the application of electrical boundary conditions. A 5-peak Hanning windowed tone burst signal with a magnitude of 190 Volt peak-to-peak was applied to PZT-1. The interface regions in the laminate structure were defined as fully bonded joints using contact and target elements. The simulation results, including waveform signals, displacement, and stress distributions along the thickness of the laminate structure, were obtained and are discussed in the subsequent section.
3.3. Wave Propagation Analysis
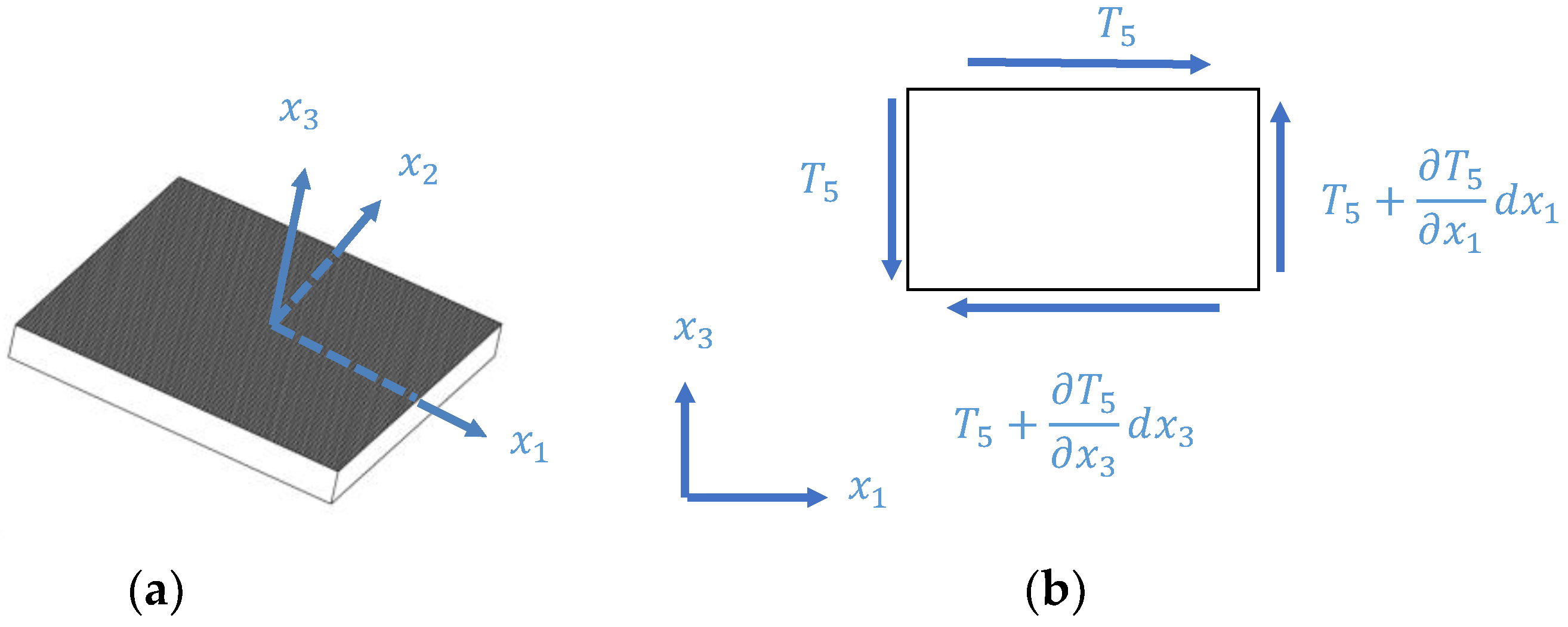
Based on the configuration of the shear-mode PZT transducers in the bondline of the laminate structure and their mode shapes discussed in
Figure 3, the shear actuation was expected to produce transverse shear stress, which is coupled to bending deformation through the classic beam theory, actuating flexural (antisymmetric) waves propagating in the structure [
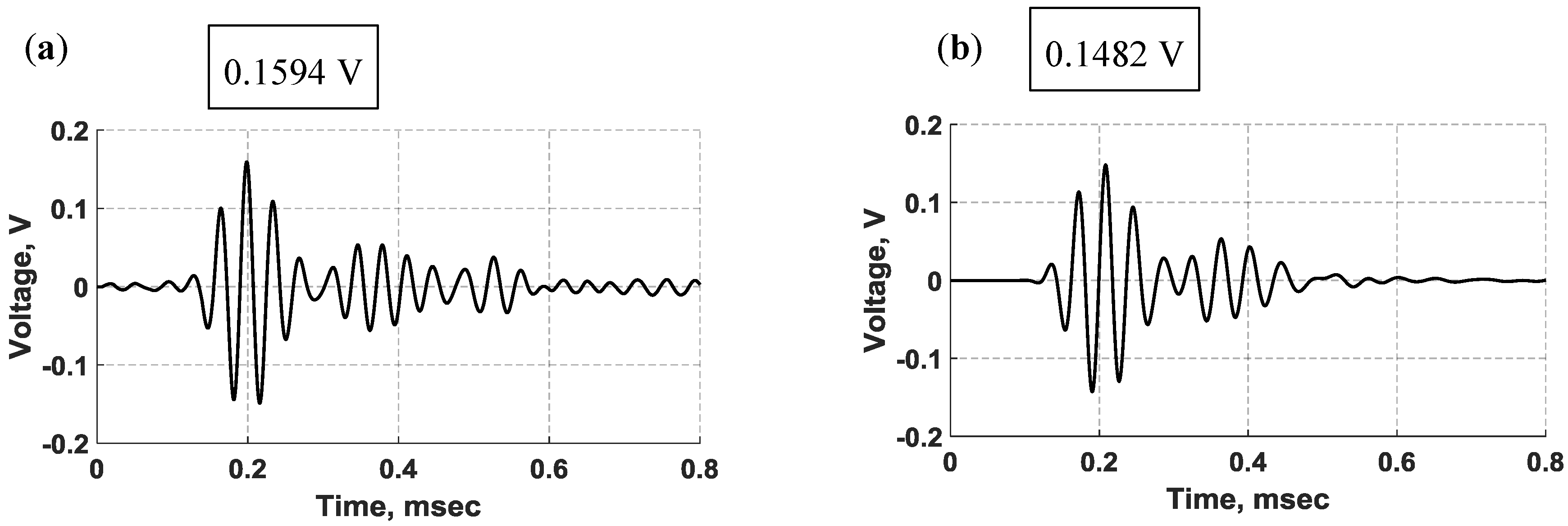
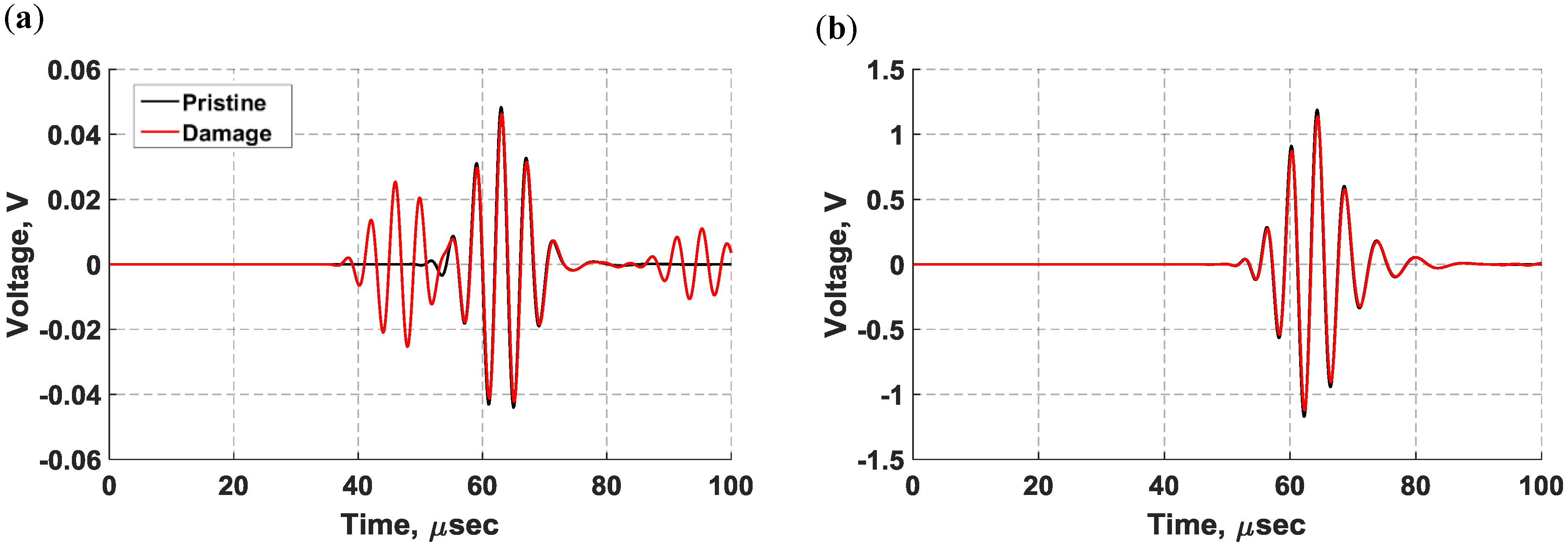
33]. Unless otherwise specified; throughout this analysis, a 5-peak Hanning windowed tone burst signal at 30 kHz was applied to the actuator. The waveform signals produced by the bondline-embedded d35 PZT sensors from experiment and simulation are provided in
Figure 6. There are two main wave packets in the received signals. The first arrival traveled 130 mm directly from the actuator to the sensor followed by its reflection from the far boundary. Close inspection of experimental signals revealed minor electromagnetic crosstalk. The crosstalk was found to match the actuation signal in time, shape, and frequency, confirming its transmission to the data acquisition system through electromagnetic phenomena and not strain wave propagation. The first wave packet in the FE voltage signal is slightly damped as compared to the experimental signal. However, the secondary reflections in the FE signal are relatively over-damped when compared with the experimental signal. This may be due to the numerical damping factor that was imposed on the model to ensure the solver stability and convergence to the correct solution. The elastic waves had to travel 130 mm and the time of flight (TOF) for the first arrival wave packet from the actuator to the sensor was measured to be 119.2 µs and 110.1 µs for the simulation and experiment, respectively. Furthermore, the experimental signal also reached the sensor slightly faster than the FE signal with a time difference of about 9.1 µs, resulting in a 1089.5 m/s group velocity for the FE first arrival and 1180.7 m/s group velocity for the experimental first arrival, respectively. This analysis combined with the structural deformation analysis that follows confirms that flexural waves were actuated and propagated in the structure by bondline-embedded d35 PZTs.
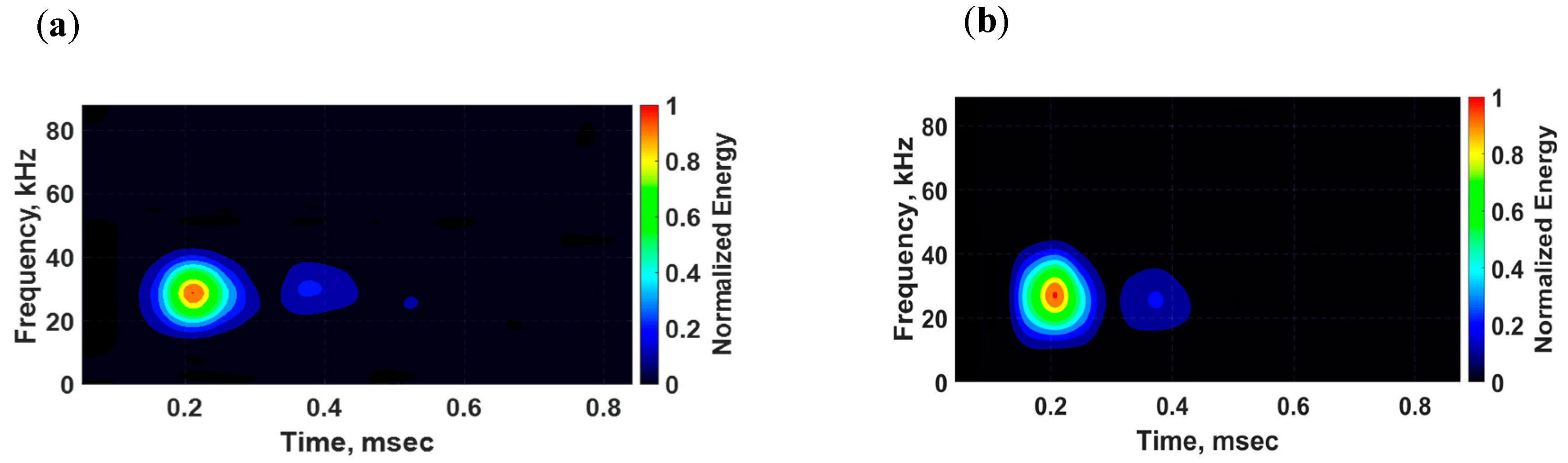
The group velocity of flexural waves is twice the phase velocity of individual waves within the flexural wave packet, making flexural waves highly dispersive [
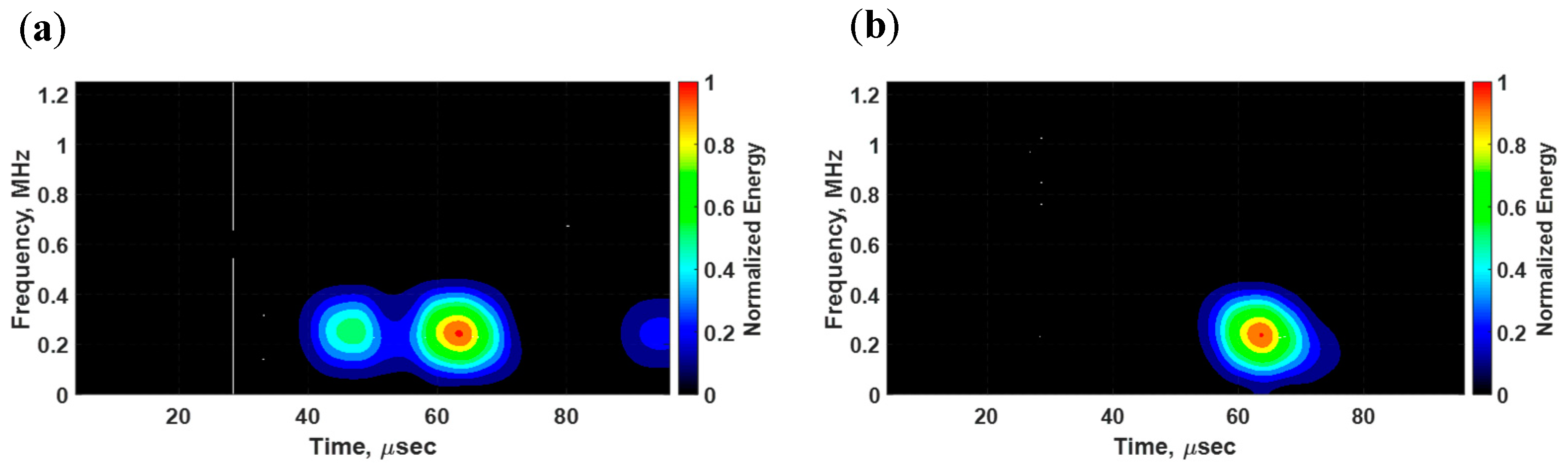
34]. Dispersive effects on wave propagation are dependent on the frequencies of both the carrier signal and the modulation window, resulting in distortions of both the shape and magnitude of the propagating signal. To qualitatively examine the dispersion effect in this analysis, the time-frequency spectrums of sensed signals were determined and are displayed in
Figure 7. The dispersion effect is slightly noticeable in the spectrums due to the short distance between the PZT transducers. By closely inspecting the spectrums, it can be observed that the dispersion effect is more noticeable on the second wave packet than on the first wave packet because the reflection wave packet traveled a longer distance than the first major arrival wave packet.
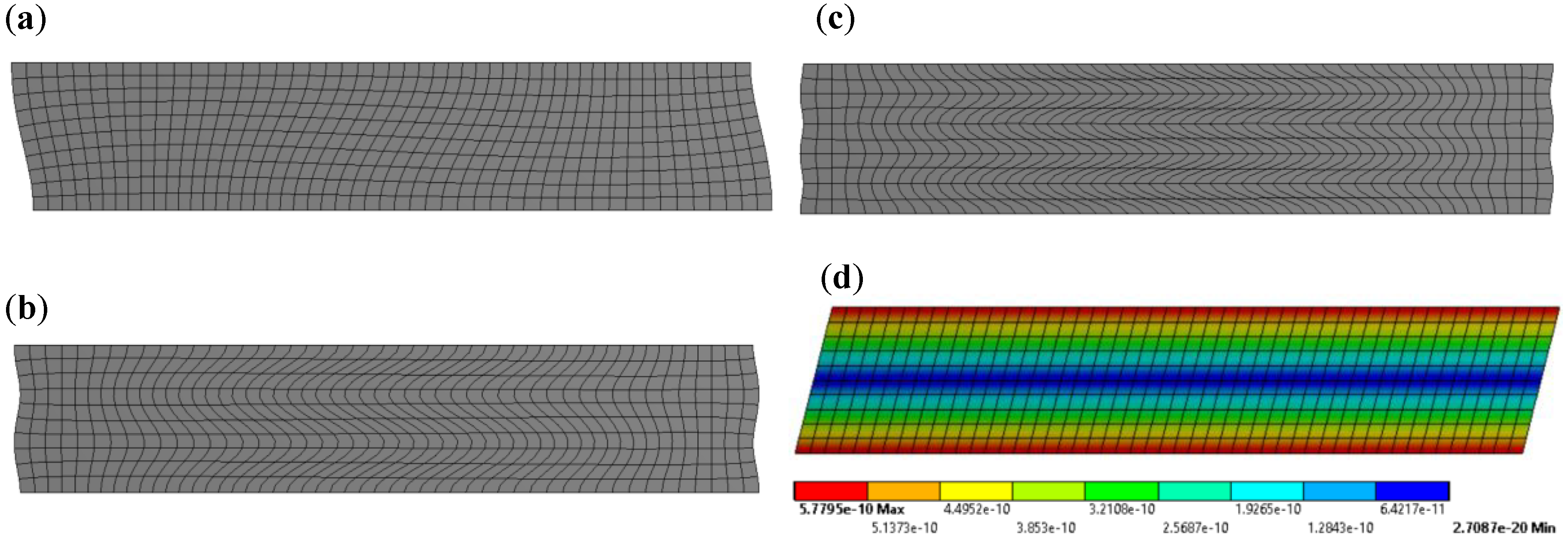
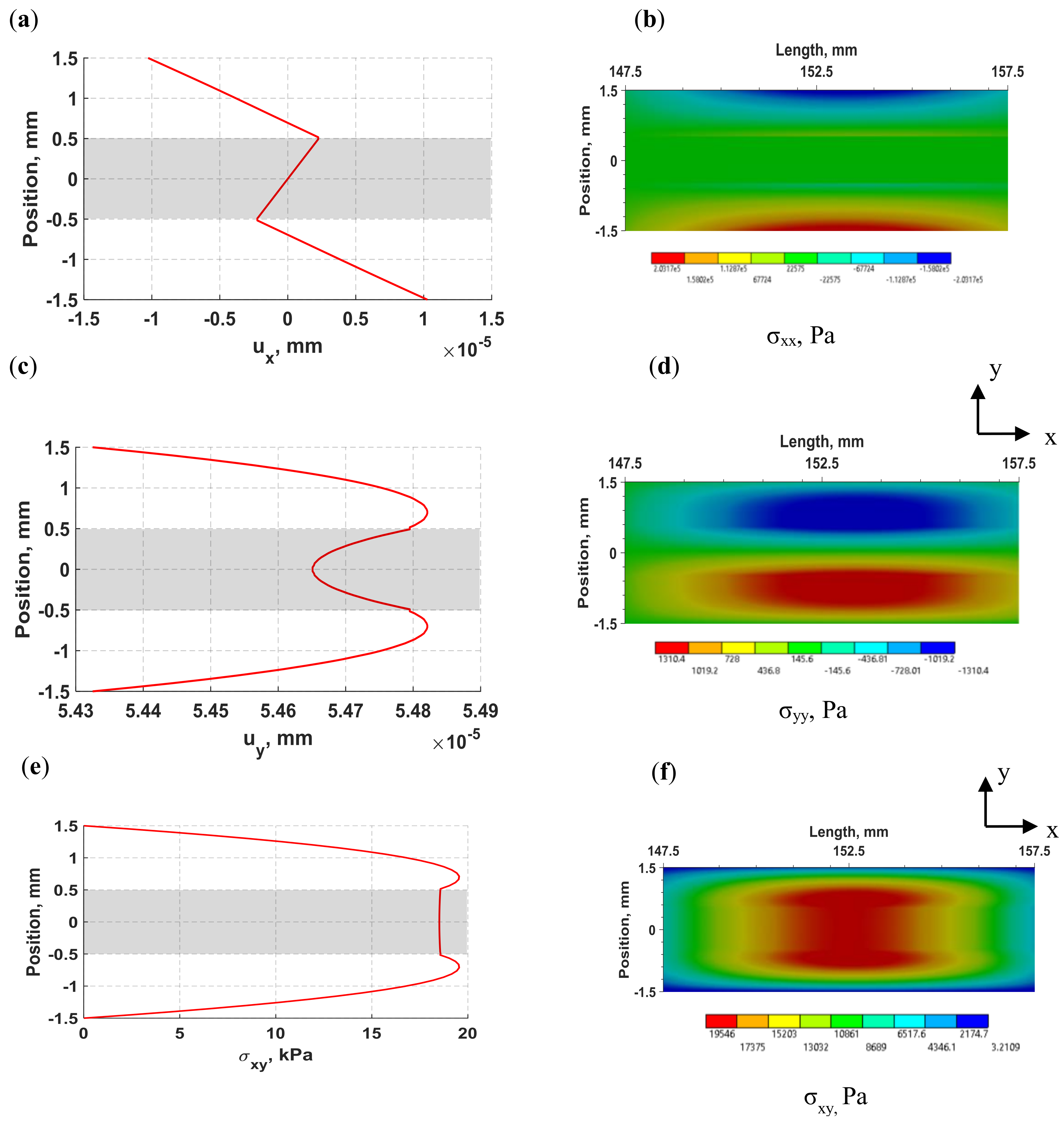
The distributions of normal displacements and stresses of flexural waves in the laminate structure induced by the d35 PZT actuator at 30 kHz are displayed in
Figure 8. The distributions were obtained at 138.3 µs. The 1D through-thickness distributions were calculated for a set of nodes located at the middle of the structure (152.5 mm) and the shaded regions represent the position of the adhesive layer with respect to the upper and lower substrates. The 2D full-field views for stress components were calculated for a section of the laminate structure located between 147.5 mm and 157.5 mm. In
Figure 8a,b, the normal displacement in the
x-direction shows linear displacement over each layer with zero displacement at the neutral axis, resulting in maximum tension in the upper plate and maximum compression in the lower plate. The distribution of normal displacement in the
y-direction (
y) shown in
Figure 8c is maximum in the substrates and minimum in the adhesive layer, but due to negligible difference between the extreme values of the lateral (
y) displacement, it can be considered uniform through the thickness over the period of wave propagation. It may be noted from
Figure 8a through to
Figure 8d that the magnitude of lateral (
y) displacement is about five times larger than the axial (
x) displacement, but the normal lateral (
y) stress is negligible compared to the axial (
x) normal stress. The distribution of shear stress in
Figure 8e,f shows an increasing shear stress from the outer surface to the interface region in the aluminum substrates while the adhesive layer maintains a constant and comparatively high shear stress.
The propagating waves exhibit the characteristics of flexural waves, which induce high lateral (y) displacement coupled with maximum axial (x) stress in the outer surface and maximum transverse shear stress near the neutral axis of the structure. In summary, a good agreement between experimental and FE voltage signals was achieved, supporting the effectiveness of d35 PZT transducers to actuate and sense flexural waves while being embedded in the bondline of laminate structures as well as validating the FE modeling procedure for the subsequent analyses throughout this study.
3.4. Frequency vs. Sensing Voltage Relation
There are several factors that can influence the behavior of actuated flexural waves in laminate structures, such as actuation frequency, structural stiffness, and the geometry of the PZT transducer, including its thickness and area. A parametric study was performed investigating the relation between the actuation frequency and the senor output voltage using the validated model. The actuation voltage was kept constant throughout this study and structural deformation was inspected in the model. This was performed by keeping the geometry constant and varying the frequency using simulation and experiments.
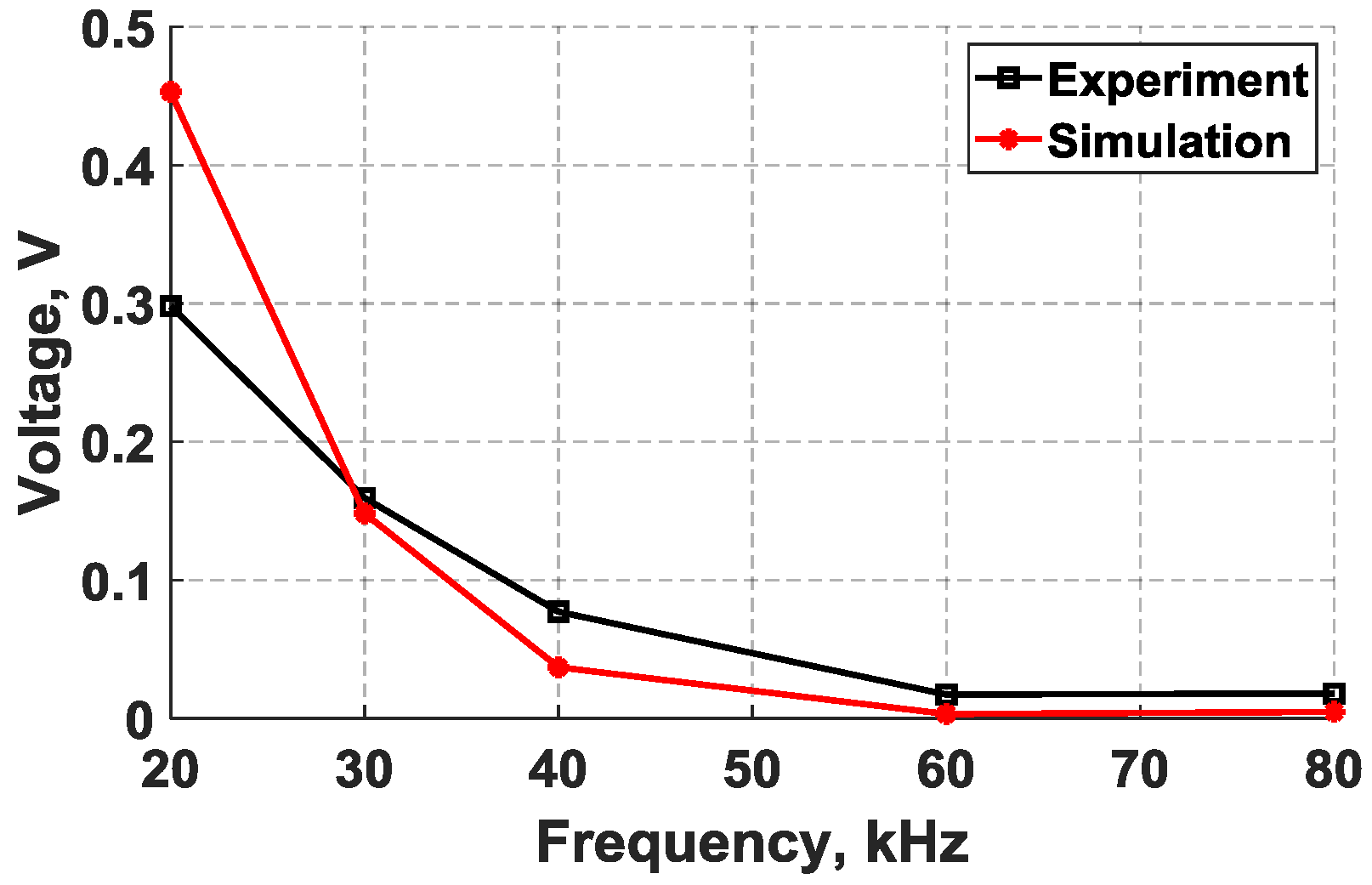
The results for the maximum voltage in the sensed signals from the simulation and experiment are plotted in
Figure 9 for comparison. The experimental results were obtained from the same specimen presented in
Figure 4. Likewise, the simulation results were based on a 2-D FE model that was performed by following the modeling procedure discussed in
Section 3.2. It can be noted from
Figure 9 that as the actuation frequency increases, the amplitude of the voltage decreases, resulting in weaker voltage signals. The flexural mode was found to be strongly attenuated above approximately 40 kHz in the received signals. This frequency range is considered relatively small and that can be attributed to the structural stiffness constraining the movement of the d35 PZT actuator as well as the size and shape of the actuator. Structural damping can potentially attenuate the signal, but the distance between the transducers is considered too short to cause significant reduction in the magnitude of voltage signals.
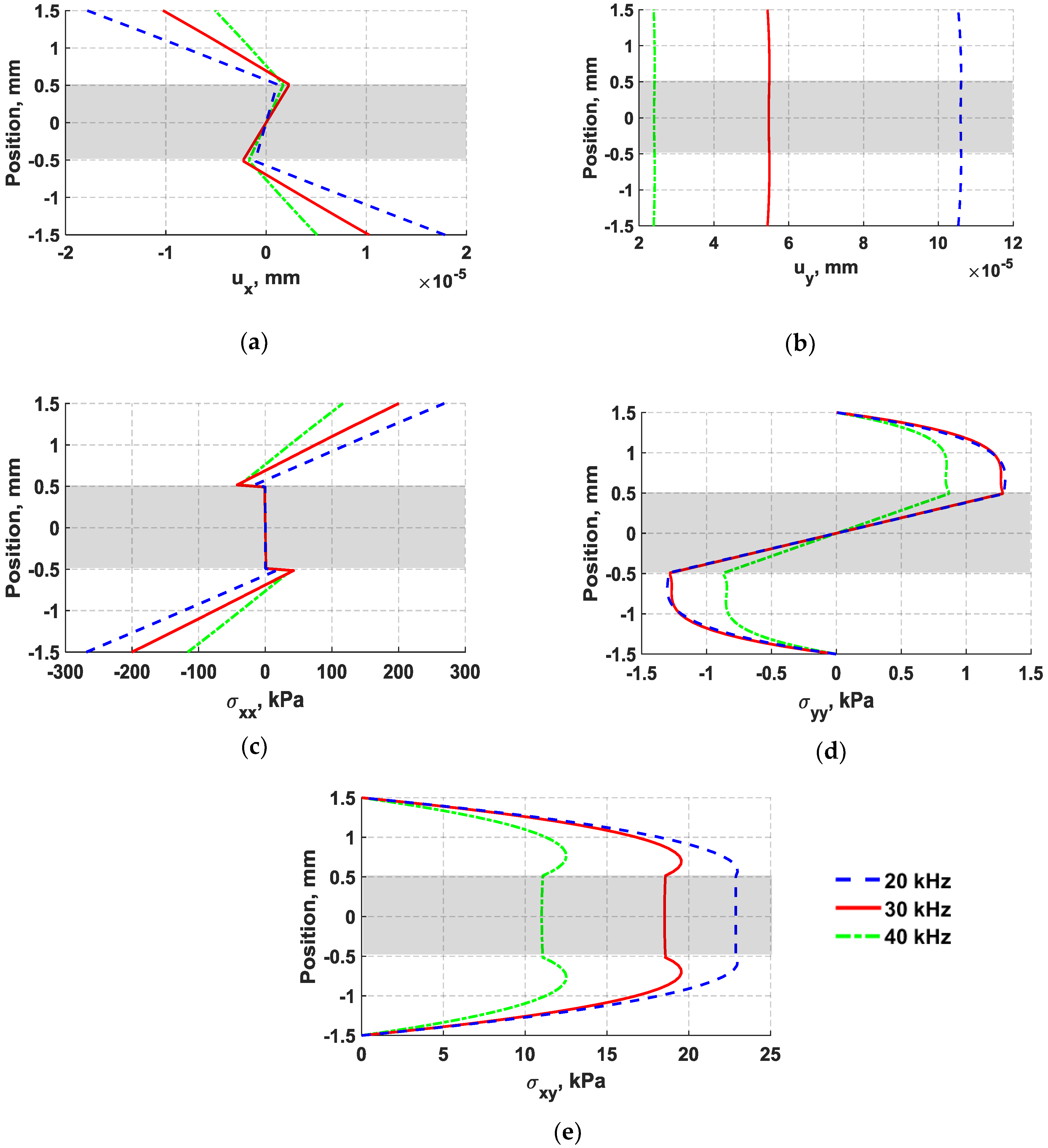
In
Figure 10, the distributions of through thickness displacements and in-plane stresses obtained from nodes located at the middle of the structure (152.5 mm) are plotted for three different frequencies, including 20 kHz, 30 kHz, and 40 kHz. The shaded region in
Figure 10 indicates the location of the adhesive layer with respect to the aluminum substrates. In
Figure 10, it can be seen that an increase in the actuation frequency results in a magnitude reduction of all normal displacement and stress components. The voltage reduction observed from the d35 sensor signal is expected to be predominantly caused by reduction in the in-plane shear stress, specifically across the thickness of the adhesive layer. The decrease in frequency caused the shear stress distribution to have the maximum shear stress concentrated within the adhesive layer. As previously mentioned in the literature, waveforms that generate shear strain have been found to be very effective for detecting joint defects by several researchers [
1,
2,
35]. Therefore, it is important to note that the high level of change of the shear stress in the bondline as compared with other existing stresses in the laminate structure provides an opportunity to design a d35 transducer such that the strength of the in-plane shear stress is focused along the thickness of the adhesive layer for monitoring the integrity of bondlines.
3.5. Parametric Study of d35 PZT Size
A numerical parametric study varying the thickness and length of d35 PZT transducers was conducted to investigate the effects on their sensing and actuation while internally embedded in the bondline of laminate structures. The geometry of the laminate structures along with the configuration of d35 PZTs considered herein is the same as the laminate specimen shown in
Figure 4. The thickness of the laminate structure was kept the same in order to maintain a constant structural stiffness throughout the analyses. Similar to what was previously presented, a 5-peak Hanning windowed tone burst signal with a center frequency of 30 kHz was used in the analysis. However, the geometry of both transducers was modified simultaneously for each simulation.
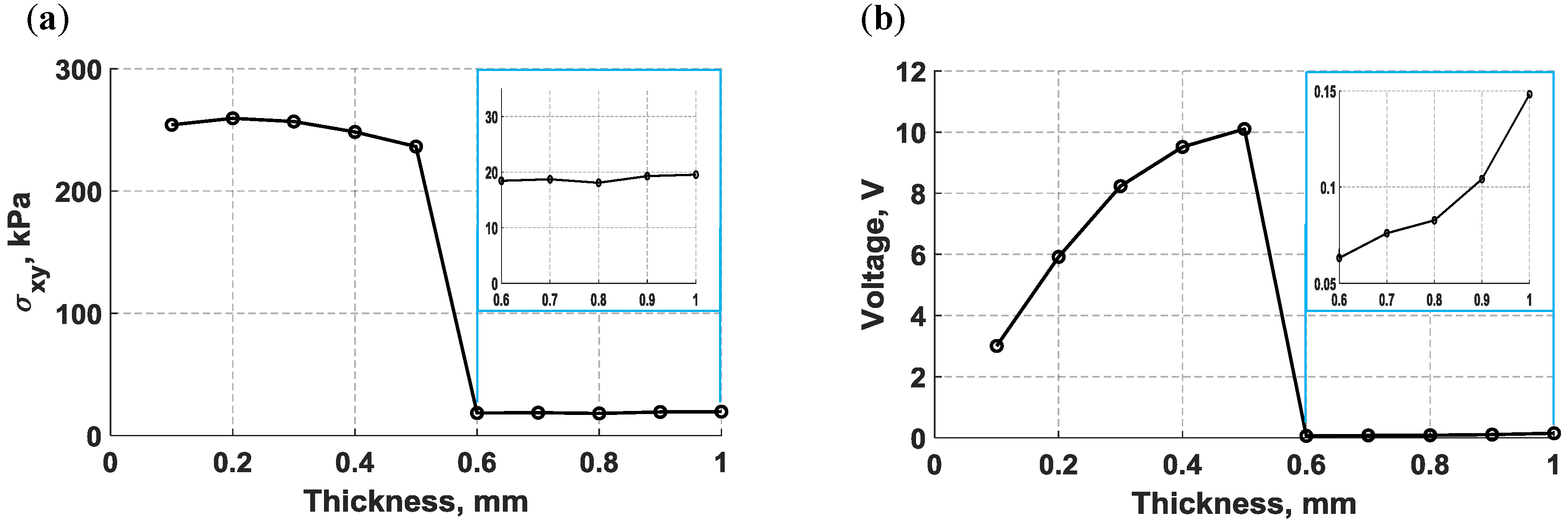
To analyze the thickness effects on the sensing and actuation of bondline-embedded d35 PZTs, the maximum in-plane shear stress generated by the actuator and the maximum voltage produced by the sensor were plotted against the PZT thickness in
Figure 11a,b respectively, as the thickness was varied from 0.1 mm to 1.0 mm in an increment of 0.1 mm. Inspection of
Figure 11a reveals that the actuation strength of d35 PZT shows complex behavior. Small thicknesses show the strongest actuation, which diminishes as the thickness increases until a thickness of 0.5 mm is reached. At this point, there is an abrupt drop in actuation strength with minimal variation as the thickness continues to increase. In
Figure 11b, an opposite behavior was observed from the d35 PZT sensor for the same thickness, indicating that thicker d35 PZT sensors can produce stronger output voltage signals than thinner d35 PZTs. The low voltage amplitudes at a thickness greater than 0.5 mm in
Figure 11b can be attributed to the low actuation strength of thick d35 PZT actuators.
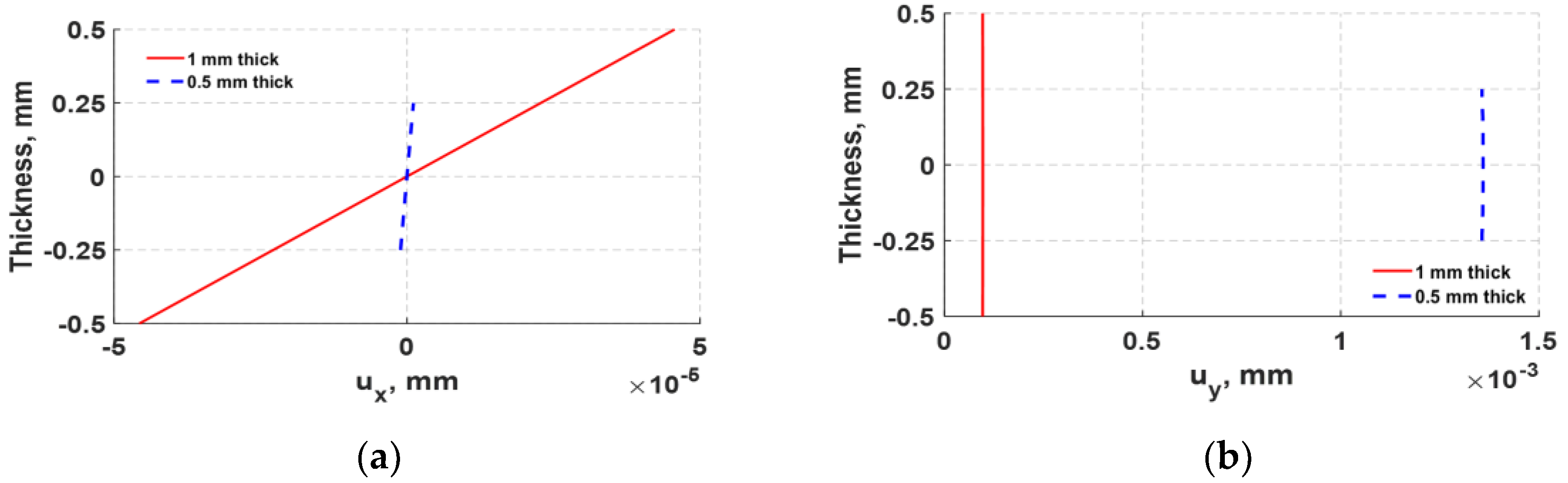
The abrupt shift in actuation shown in
Figure 11a was further examined by analyzing the structural deformation of 1 mm and 0.5 mm d35 PZT actuators. The normal displacements displayed in
Figure 12 were obtained from a set of nodes located at the left vertical edge of both d35 PZT actuators. It can be observed from
Figure 12 that the 1 mm d35 PZT actuator generates higher axial (
x) displacement, but lower lateral (
y) displacement than the 0.5 mm d35 PZT actuator, indicating a radical change in the response of the bondline-embedded d35 PZT actuator when its thickness was reduced below 0.5 mm. Furthermore, the total deformation of the actuators embedded in the bondline of the laminate structure are displayed in
Figure 13. The results indicate that the 1 mm d35 PZT primarily exhibits shear mode actuation to produce flexural waves while 0.5 mm d35 PZT shows flexural mode actuation. This general behavior is believed to be a combined effect of the change in electric field intensity in the actuator as the thickness changes along with the stiffness ratio of the actuator relative to the structure. The results indicate that the stiffness ratio is the main factor for the transition in the behavior of the bondline-embedded PZT transducer at 0.5 mm. It should be noted from
Figure 11 that there is an optimal stiffness ratio for which d35 PZT actuators generate strong flexural waves in a laminate structure. Further investigation is necessary as outlined in the future work section.
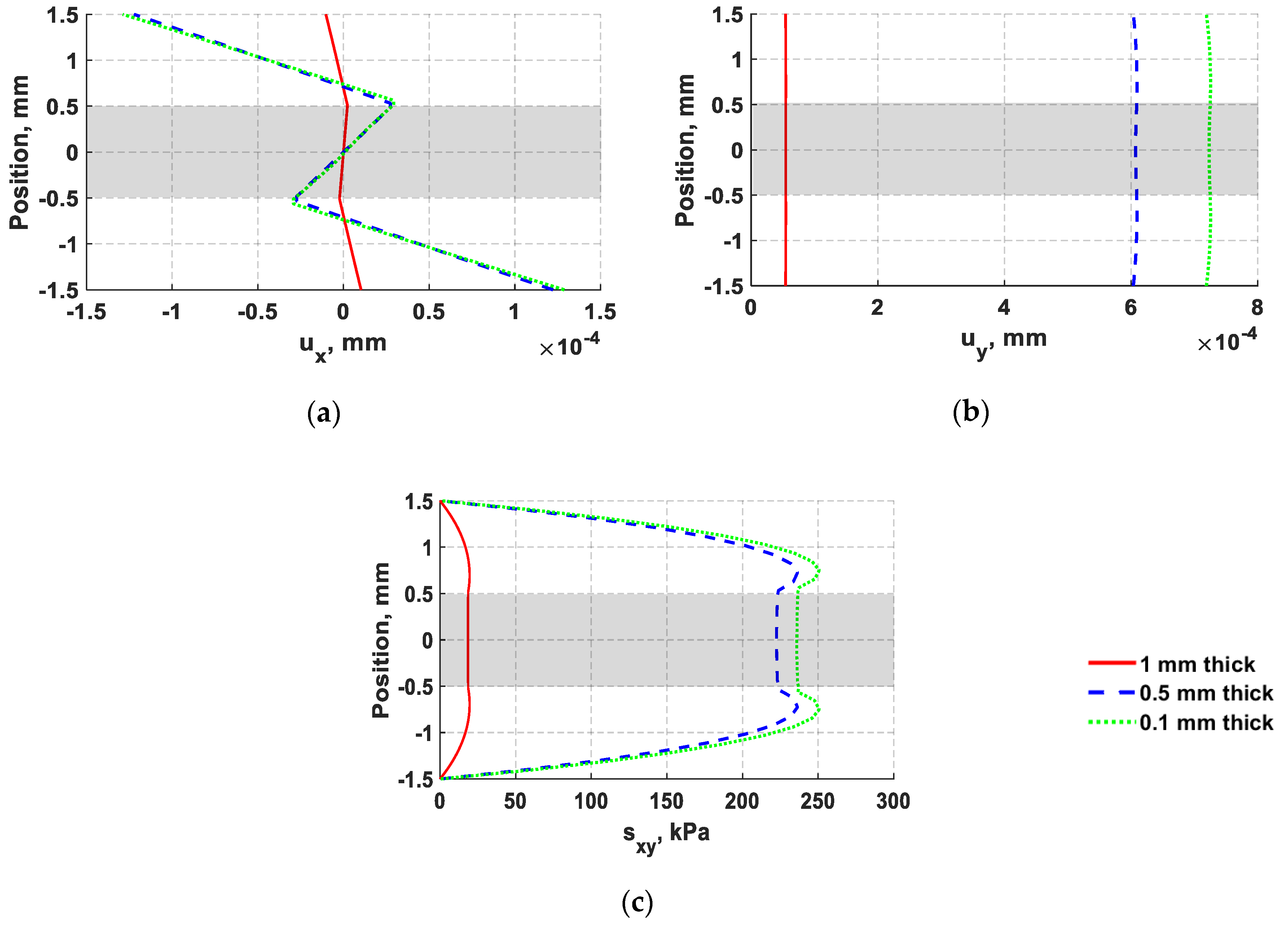
The distributions of through thickness normal displacements and in-plane shear stress for 0.1 mm, 0.5 mm, and 1 mm actuators are also provided in
Figure 14. The effect of varying PZT thickness on each normal displacement component is not linear, showing higher change on lateral (
y) displacement than axial (
x) displacement. However, the lateral (
y) displacement of flexural waves is expected to have little influence on d35 PZT sensors, especially when the propagating waves have a long wavelength of 39 mm as in this case. A d35 PZT sensor is fundamentally efficient in sensing in-plane shear stress because these waves align well with its natural vibration mode as shown in
Figure 3. Therefore, d35 PZT sensors are not expected to be capable of sensing in-plane symmetric axial (
x) displacement. This concept will be further examined in the next section.
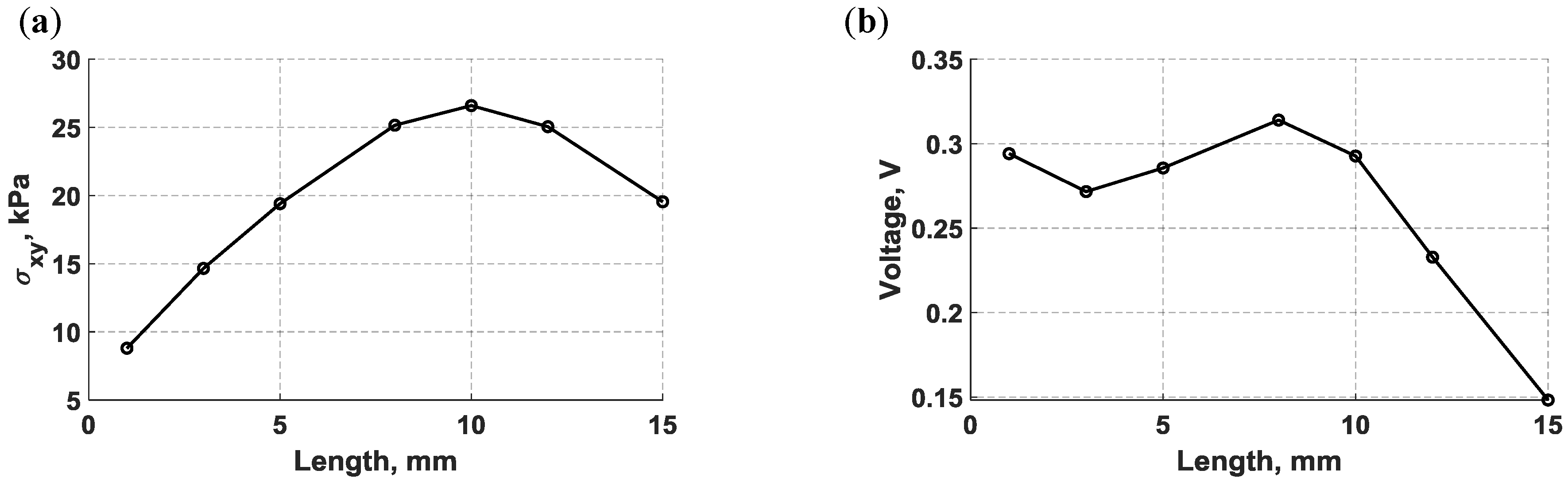
The length of bondline-embedded d35 PZT transducers was also varied from 1 mm to 15 mm. The maximum shear stress, which represents the actuation strength herein, was monitored while varying the PZT length and is plotted in
Figure 15. As can be noted from
Figure 15a, the actuation strength increases and reaches its maximum level at 10 mm, and then decreases as the actuator is approaching 15 mm in length. To analyze the sensing performance, the maximum voltage produced by d35 PZT sensors were recorded and plotted against their length in
Figure 15b. d35 PZT sensors have higher sensitivity for the propagating waves when shorter d35 PZT sensors were used as this can be discerned from
Figure 15b.
In summary, the numerical parametric study shows that designing bondline-embedded d35 PZT transducers imposes differing preferences for actuator and sensor geometries. Therefore, finding the optimum pair of d35 PZT transducers can maximize the signal to noise ratio and the wave propagation distances, which are essential in building a robust structural health monitoring system.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}