Research on an Improved Method for Foot-Mounted Inertial/Magnetometer Pedestrian-Positioning Based on the Adaptive Gradient Descent Algorithm




Abstract
:1. Introduction
2. Principle of Foot-Mounted Inertial Pedestrian-Positioning System
2.1. Dead Reckoning for Inertial Pedestrian Positioning
2.2. Basic ZUPT Algorithm
3. Fast-Initial Alignment Based on Adaptive Gradient Descent Algorithm
4. Adaptive Inertial/Magnetometer Positioning Algorithm by Improving Heading Observability
4.1. Magnetic Interference Compensated and Heading Estimation
4.2. Inertial/Magnetometer Positioning Algorithm Based on Adaptive Kalman Filter
5. Scheme of Improved Pedestrian Position Algorithm and Performance Evaluation
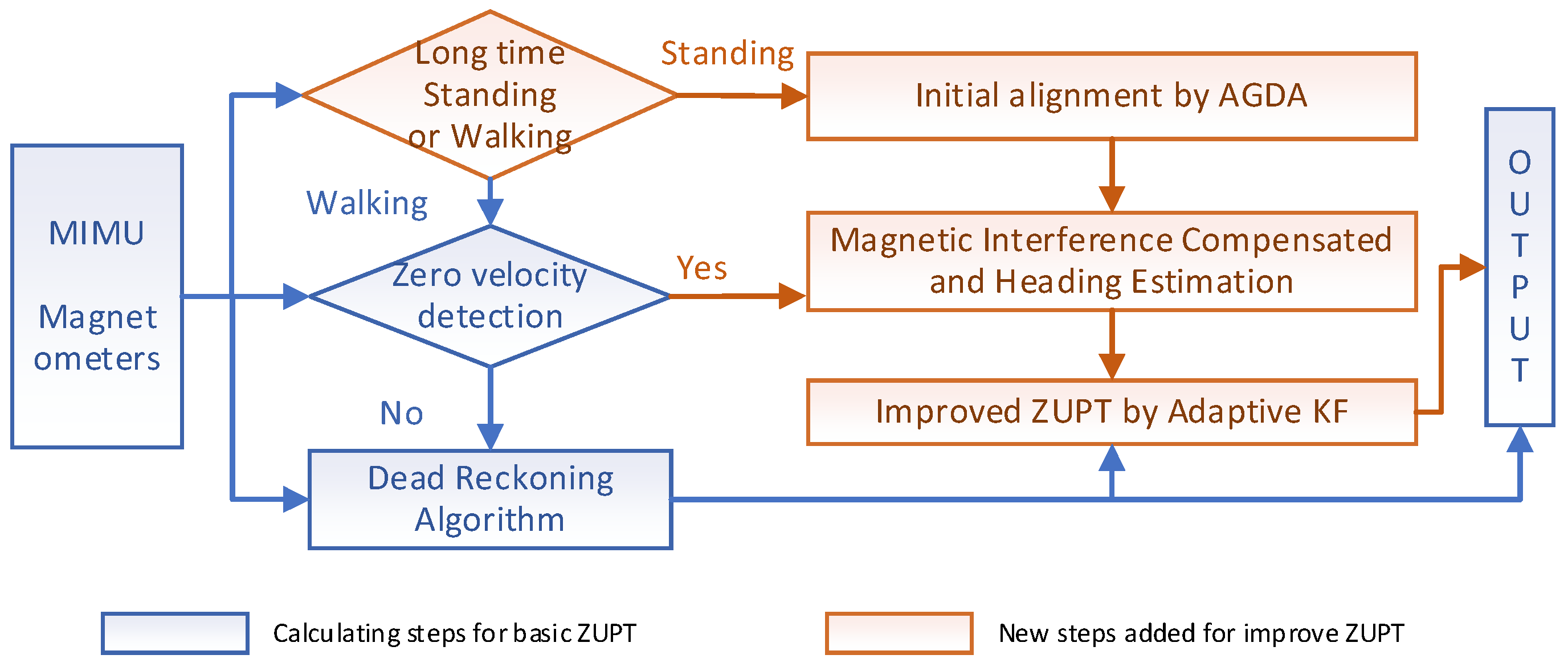
5.1. Scheme of Improved Pedestrian Position Algorithm
5.2. Experiment Study
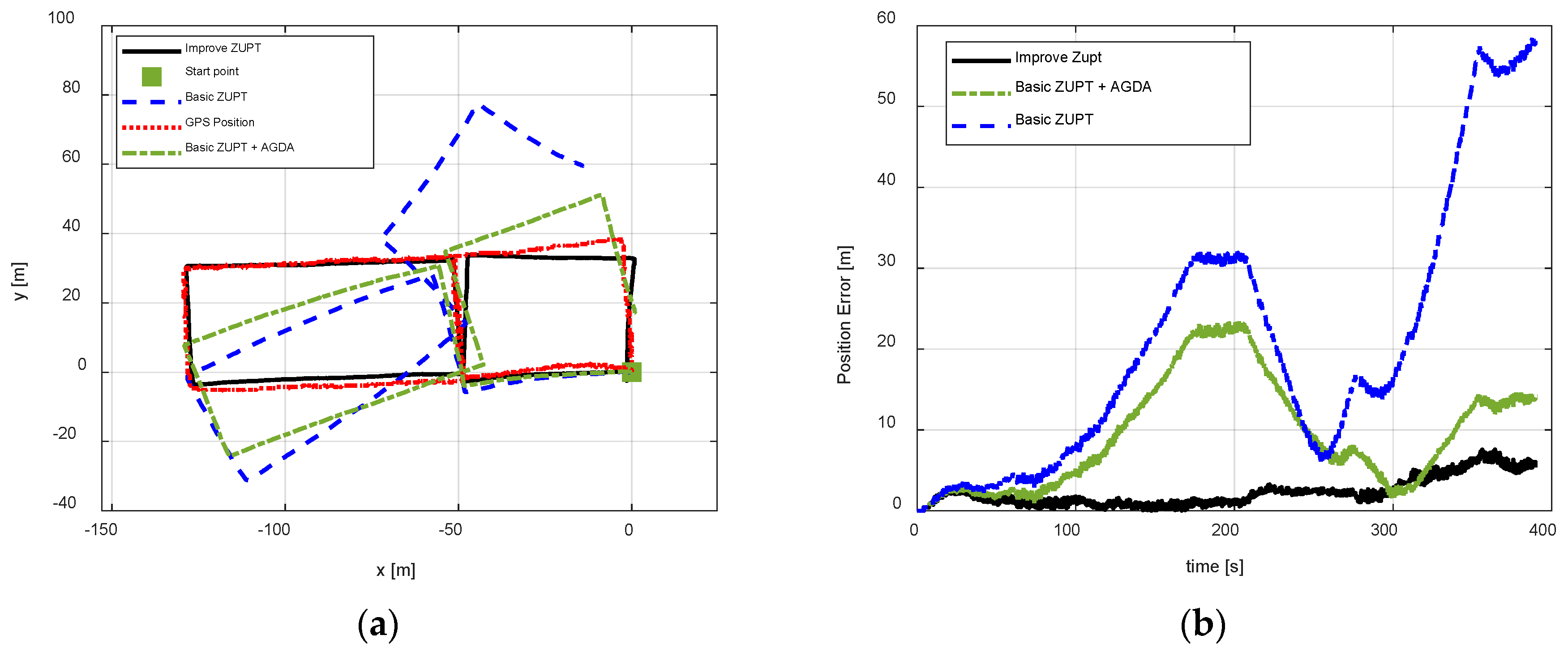
- Basic ZUPT: navigation algorithm of the basic ZUPT algorithm is discussed in Section 2.2;
- Fast-initial alignment by AGDA: ADGA initial alignment algorithm proposed in Section 3;
- Basic ZUPT + AGDA: the ZUPT algorithm based on the AGDA fast-initial alignment algorithm in Section 2.2 and the navigation algorithm by basic ZUPT in Section 2.2;
- Improve ZUPT: the ZUPT algorithm based on the fast-initial alignment algorithm by AGDA was introduced in Section 2.2 and the navigation algorithm by the adaptive positioning algorithm discussed in Section 4;
- GPS Position: GPS position as the standard reference information.
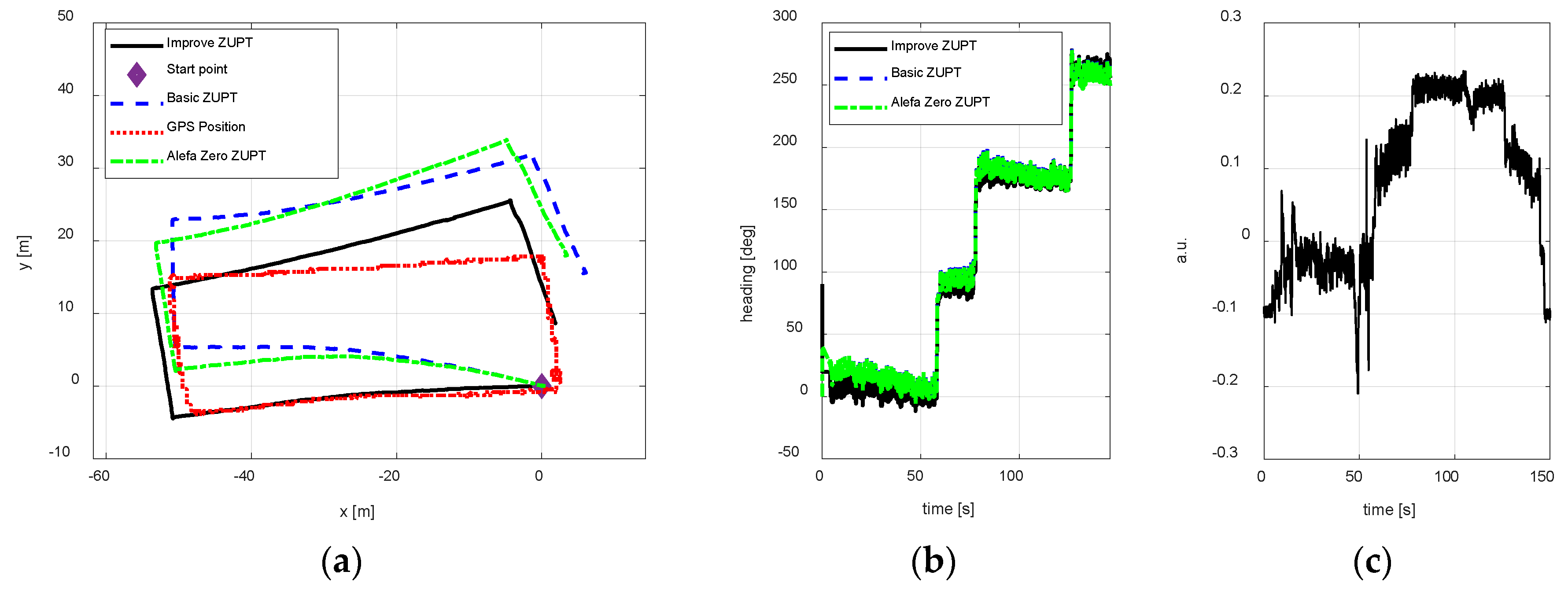
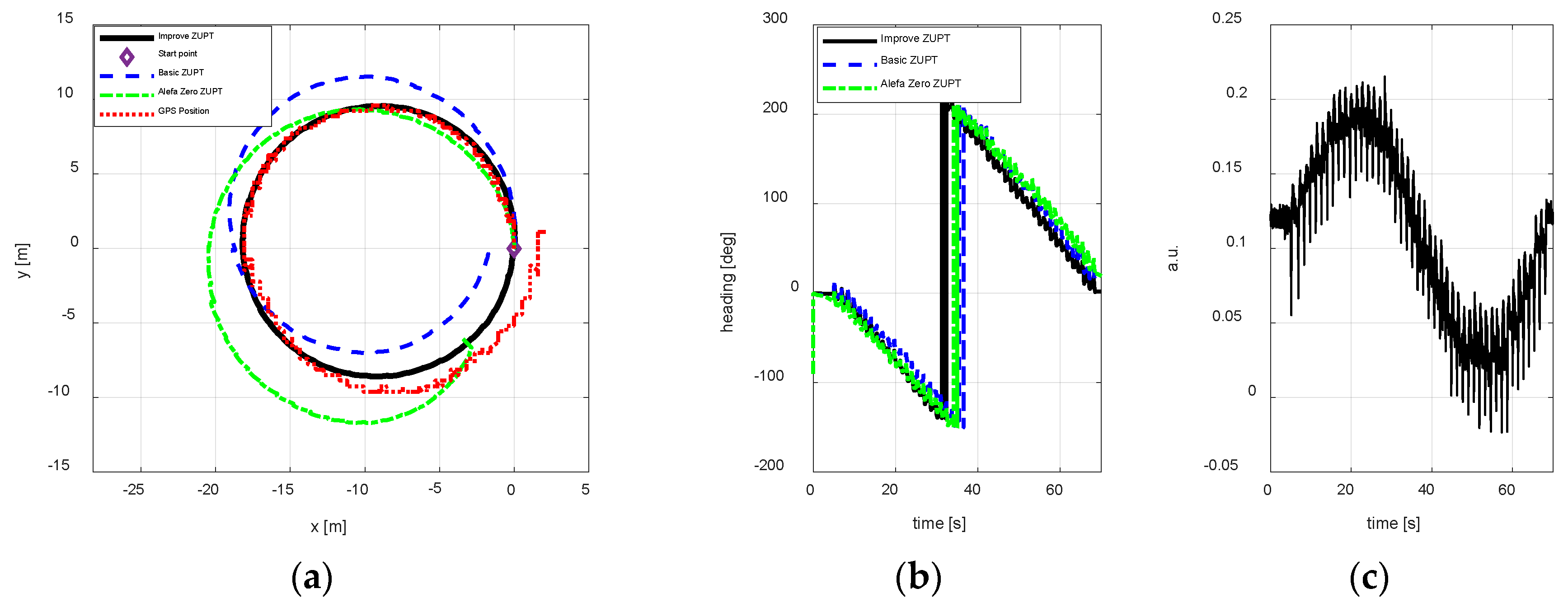
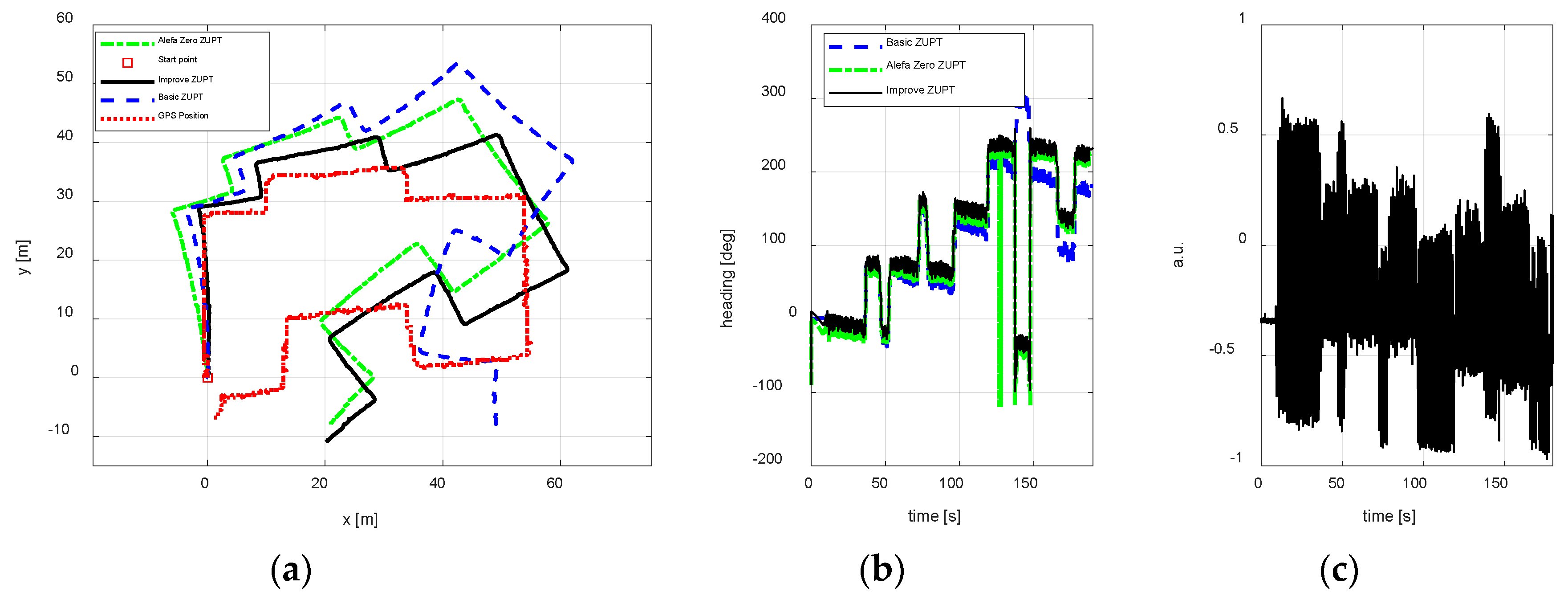
- Basic ZUPT: the basic ZUPT algorithm is discussed in Section 2.2;
- Alefa Zero: ZUPT algorithm based on the adaptive positioning algorithm is discussed in Section 4, but in Equation (9c). It means that the heading misalignment angle is introduced as the observation for Kalman Filter, but the magnetic disturbances were not compensated.
- Improve ZUPT: ZUPT based on the fast-initial alignment algorithm by AGDA in Section 2.2 and the navigation algorithm by the adaptive positioning algorithm in Section 4.
- GPS Position: GPS position as the standard reference information.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
References
- Ojeda, L.; Borenstein, J. Non-GPS navigation for security personnel and first responders. J. Navig. 2007, 60, 391–407. [Google Scholar] [CrossRef]
- Elwell, J. Inertial Navigation for the Urban Warrior. In Proceedings of the Digitization of the Battlespace IV, Orlando, FL, USA, 9 July 1999; Volume 3709, pp. 196–204. [Google Scholar]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 99, 1–13. [Google Scholar] [CrossRef]
- Fischer, C.; Sukumar, P.T.; Hazas, M. Tutorial: Implementing a Pedestrian Tracker Using Inertial Sensors. IEEE Pervasive Comput. 2013, 12, 17–27. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graphics Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Bebek, Ö.; Suster, M.A.; Rajgopal, S.; Fu, M.J.; Huang, X.; Cavusoglu, M.C.; Young, D.J.; Mehregany, M.; van den Bogert, A.J.; Mastrangelo, C.H.. Personal Navigation via High-Resolution Gait Corrected Inertial Measurement Units. IEEE Trans. Instrum. Meas. 2010, 59, 3018–3027. [Google Scholar] [CrossRef]
- Nilsson, J.O.; Skog, I.; Händel, P.; Hari, K.V.S. Foot-mounted inertial navigation for everybody—An open-source embedded implementation. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012. [Google Scholar]
- Godha, S.; Lachapelle, G. Foot mounted inertial system for pedestrian navigation. Meas. Sci. Technol. 2008, 19, 1–9. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P.; Nilsson, J.O.; Rantakokko, J. Zero-velocity detection—An algorithm evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef] [PubMed]
- Skog, I.; Nilsson, J.O.; Händel, P. Evaluation of zero-velocity detectors for foot-mounted inertial navigation systems. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Li, X.; Mao, Y.; Xie, L.; Chen, J.; Song, C. Applications of zero-velocity detector and Kalman filter in zero velocity update for inertial navigation system. In Proceedings of the Chinese Guidance, Navigation and Control Conference (CGNCC), Yantai, China, 8–10 August 2014; pp. 1760–1763. [Google Scholar]
- Zhao, H.; Wang, Z.; Gao, Q.; Hassan, M.M.; Alelaiwi, A. Smooth estimation of human foot motion for zero-velocity-update-aided inertial pedestrian navigation system. Sens. Rev. 2015, 35, 389–400. [Google Scholar] [CrossRef]
- Zhang, X.; Ren, M.; Wang, P.; Pan, K. A new zero velocity update algorithm for the shoe-mounted personal navigation system based on IMU. In Proceedings of the 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 5297–5302. [Google Scholar]
- Fathi, M.; Mohammadi, A.; Ghahramani, N. INS Alignment Improvement Using Rest Heading and Zero-Velocity Updates. J. Space Sci. Technol. 2016, 8, 45–51. [Google Scholar]
- Zhang, R.; Yang, H.; Höflinger, F.; Reindl, L.M. Adaptive zero velocity update based on velocity classification for pedestrian tracking. IEEE Sens. J. 2017, 17, 2137–2145. [Google Scholar] [CrossRef]
- Fang, J.C.; Wan, D.J. A fast initial alignment method for strapdown inertial navigation system on stationary base. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1501–1504. [Google Scholar] [CrossRef]
- Chang, L.; Li, J.; Chen, S. Initial Alignment by Attitude Estimation for Strapdown Inertial Navigation Systems. IEEE Trans. Instrum. Meas. 2014, 64, 784–794. [Google Scholar] [CrossRef]
- Xing, H.; Chen, Z.; Yang, H. Self-Alignment MEMS IMU Method Based on the Rotation Modulation Technique on a Swing Base. Sensors 2018, 18, 1178. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Efatmaneshnik, M.; Dempster, A.G. Attitude determination by integration of MEMS inertial sensors and GPS for autonomous agriculture applications. GPS Solutions 2012, 16, 41–52. [Google Scholar] [CrossRef]
- Niu, X.; Li, Y.; Zhang, H.; Wang, Q.; Ban, Y. Fast Thermal Calibration of Low-Grade Inertial Sensors and Inertial Measurement Units. Sensors 2013, 13, 12192–12217. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, T.; Wang, B.; Wang, X.Y. Research on Rotating Modulated Strap-Down Inertial Navigation System Based on Micro-Electro-Mechanical Systems (MEMS) Sensors (RMSINS). Appl. Mech. Mater. 2012, 148–149, 192–197. [Google Scholar] [CrossRef]
- Wang, X.; Wu, J.; Wang, T.X.W. Analysis and Verification of Rotation Modulation Effects on Inertial Navigation System based on MEMS Sensors. J. Navig. 2013, 66, 751–772. [Google Scholar] [CrossRef] [Green Version]
- Nilsson, J.-O.; Skog, I.; Handel, P.; Hari, K.V.S. Foot-mounted INS for Everybody—An Open-source Embedded Implementation. In Proceedings of the 2012 IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 140–145. [Google Scholar]
- Skog, I.; Nilsson, J.-O.; Zachariah, D.; Handel, P. Fusing the Information from Two Navigation Systems Using an Upper Bound on Their Maximum Spatial Separation. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Nilsson, J.-O.; Zachariah, D.; Skog, I.; Händel, P. Cooperative localization by dual foot-mounted inertial sensors and inter-agent ranging. EURASIP J. Adv. Signal Process. 2013. [Google Scholar] [CrossRef]
- Manon, K.; Thomas, B.S. Magnetometer Calibration Using Inertial Sensors. IEEE Sens. J. 2016, 16, 5679–5690. [Google Scholar]
- Metge, J.; Mégret, R.; Giremus, A.; Berthoumieu, Y.; Décamps, T. Calibration of an inertial-magnetic measurement unit without external equipment, in the presence of dynamic magnetic disturbances. Meas. Sci. Technol. 2014, 25, 125106. [Google Scholar] [CrossRef]
- Vasconcelos, J.F.; Elkaim, G.; Silvestre, C.; Oliveira, P.; Cardeira, B. Geometric approach to strapdown magnetometer calibration in sensor frame. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1293–1306. [Google Scholar] [CrossRef]
- Wu, Y.; Zou, D.; Liu, P.; Yu, W. Dynamic Magnetometer Calibration and Alignment to Inertial Sensors by Kalman Filtering. IEEE Trans. Control Syst. Technol. 2018, 26, 716–723. [Google Scholar] [CrossRef] [Green Version]
- Springmann, J.C.; Cutler, J.W. Attitude-independent magnetometer calibration with time-varying bias. J. Guid. Control Dyn. 2012, 35, 1080–1088. [Google Scholar] [CrossRef]
- Alonso, R.; Shuster, M.D. TWO STEP: A fast robust algorithm for attitude-independent magnetometer-bias determination. J. Astron. Sci. 2002, 50, 433–451. [Google Scholar]
- Alonso, R.; Shuster, M.D. Complete linear attitude-independent magnetometer calibration. J. Astron. Sci. 2002, 50, 477–490. [Google Scholar]
- Hol, J.D. Sensor fusion and calibration of inertial sensors, vision, ultra-wideband and GPS. Ph.D. Thesis, Linköping University, Linköping, Sweden, 2011. [Google Scholar]
- Wu, Y.; Shi, W. On calibration of three-axis magnetometer. IEEE Sens. J. 2015, 15, 6424–6431. [Google Scholar] [CrossRef]
- Grandvallet, B.; Zemouche, A.; Boutayeb, M.; Changey, S. Real-time attitude-independent three-axis magnetometer calibration for spinning projectiles: A sliding window approach. IEEE Trans. Control Syst. Technol. 2014, 22, 255–264. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Lai, K.-L.; Harman, R.R. Real-time attitude independent three-axis magnetometer calibration. J. Guid. Control Dyn. 2005, 28, 115–120. [Google Scholar] [CrossRef]
- Wang, Q.; Guo, Z.; Sun, Z.; Cui, X.; Liu, K. Research on the Forward and Reverse Calculation Based on the Adaptive Zero-Velocity Interval Adjustment for the Foot-Mounted Inertial Pedestrian-Positioning System. Sensors 2018, 18, 1642. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Li, W.; Luo, T.; Luo, C.; Liang, H.; Zhang, H.; Gu, Y. Research on the strategy of motion constraint-aided ZUPT for the SINS positioning system of a shearer. Micromachines 2017, 8, 340. [Google Scholar] [CrossRef] [PubMed]
- Song, J.W.; Park, C.G. Enhanced pedestrian navigation based on course angle error estimation using cascaded kalman filters. Sensors 2018, 18, 1281. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; El-Sheimy, N.; Lan, H.; Liu, Z. Map-based indoor pedestrian navigation using an auxiliary particle filter. Micromachines 2017, 8, 225. [Google Scholar] [CrossRef] [PubMed]
- Petritoli, E.; Giagnacovo, T.; Leccese, F. Lightweight GNSS/IRS integrated navigation system for UAV vehicles. In Proceedings of the 2014 IEEE International Workshop on Metrology for Aerospace, (MetroAeroSpace), Benevento, Italy, 29–30 May 2014; pp. 56–61. [Google Scholar]
- Xu, X.; Xu, X.; Zhang, T.; Li, Y.; Tong, J. A kalman filter for sins self-alignment based on vector observation. Sensors 2017, 17, 264. [Google Scholar] [CrossRef] [PubMed]
- Ben, Y.; Yin, G.; Gao, W.; Sun, F. Improved filter estimation method applied in zero velocity update for SINS. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009. [Google Scholar]
- Ramanandan, A.; Chen, A.; Farrell, J.A. Observability analysis of an inertial navigation system with stationary updates. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Madgwick, S.O.H. An efficient orientation filter for inertial and inertial magnetic sensor arrays. Available online: https://forums.parallax.com/uploads/attachments/41167/106661.pdf (accessed on 22 November 2018).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Typical | Max | ||
|---|---|---|---|---|
| Gyro | Bias repeatability | [deg/s] | 0.2 | 0.5 |
| Noise density | [deg/s] | 0.01 | 0.015 | |
| Accelerometer | Bias repeatability | [m/s2] | 0.03 | 0.05 |
| Noise density | [μg/√Hz] | 80 | 150 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Yin, J.; Noureldin, A.; Iqbal, U. Research on an Improved Method for Foot-Mounted Inertial/Magnetometer Pedestrian-Positioning Based on the Adaptive Gradient Descent Algorithm. Sensors 2018, 18, 4105. https://doi.org/10.3390/s18124105
Wang Q, Yin J, Noureldin A, Iqbal U. Research on an Improved Method for Foot-Mounted Inertial/Magnetometer Pedestrian-Positioning Based on the Adaptive Gradient Descent Algorithm. Sensors. 2018; 18(12):4105. https://doi.org/10.3390/s18124105
Chicago/Turabian StyleWang, Qiuying, Juan Yin, Aboelmagd Noureldin, and Umar Iqbal. 2018. "Research on an Improved Method for Foot-Mounted Inertial/Magnetometer Pedestrian-Positioning Based on the Adaptive Gradient Descent Algorithm" Sensors 18, no. 12: 4105. https://doi.org/10.3390/s18124105
APA StyleWang, Q., Yin, J., Noureldin, A., & Iqbal, U. (2018). Research on an Improved Method for Foot-Mounted Inertial/Magnetometer Pedestrian-Positioning Based on the Adaptive Gradient Descent Algorithm. Sensors, 18(12), 4105. https://doi.org/10.3390/s18124105