The Elastic Contact and Stability Analysis of an Inertial Micro-Switch with a Spring Stationary Electrode


Abstract
:1. Introduction
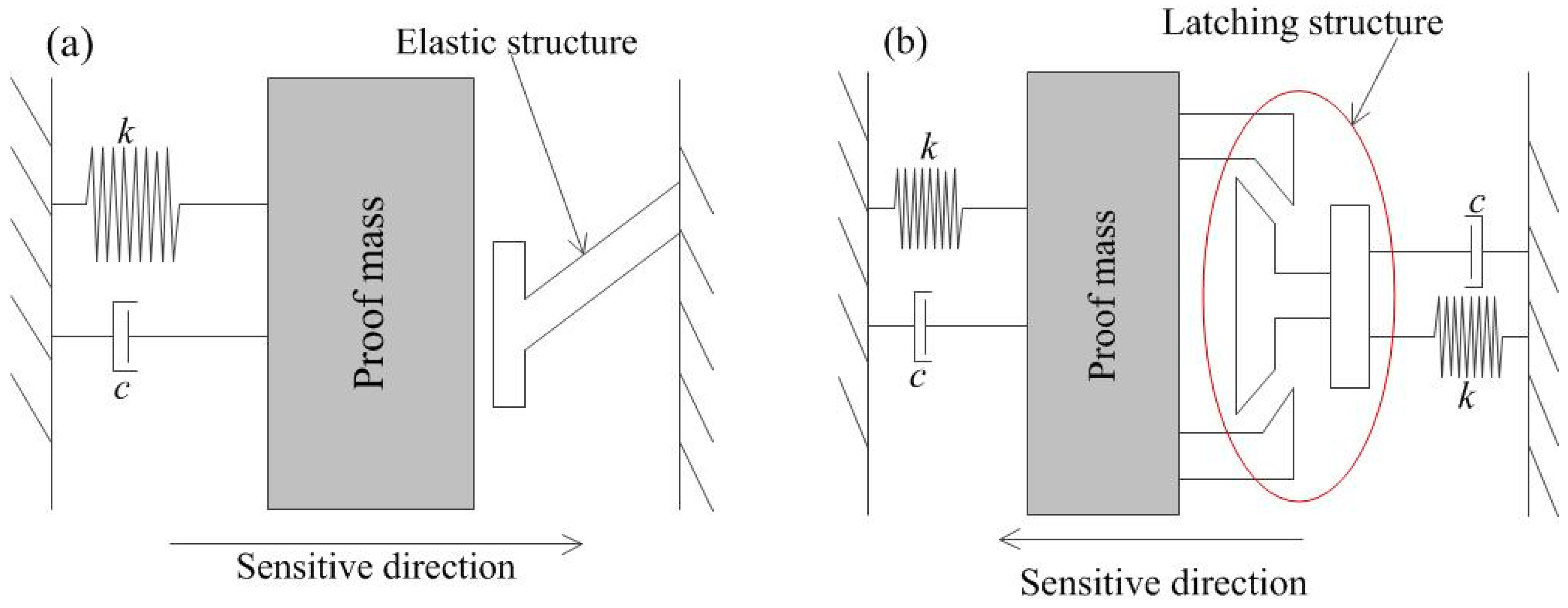
2. Structure Design
3. The Analysis and Simulation
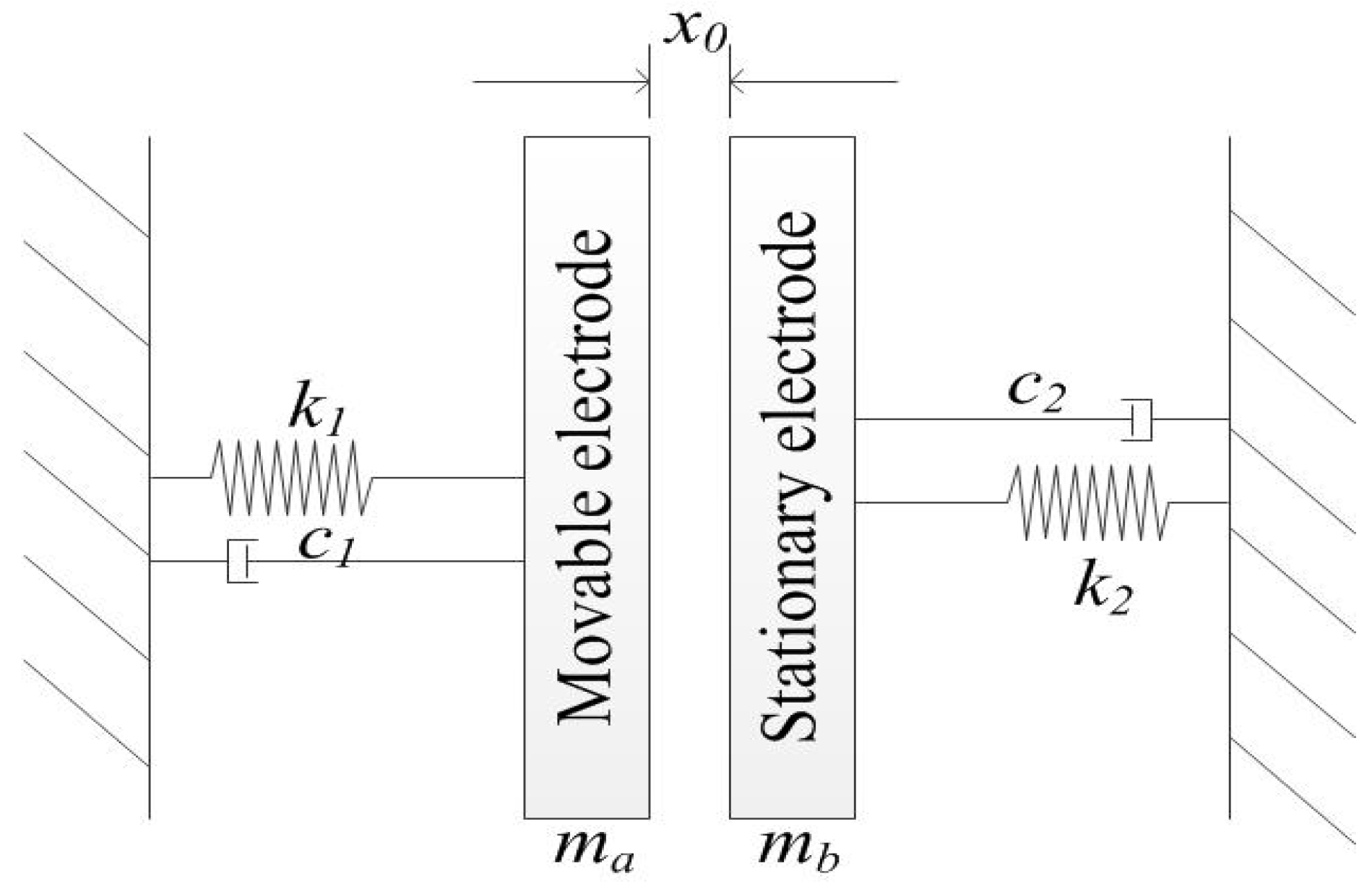
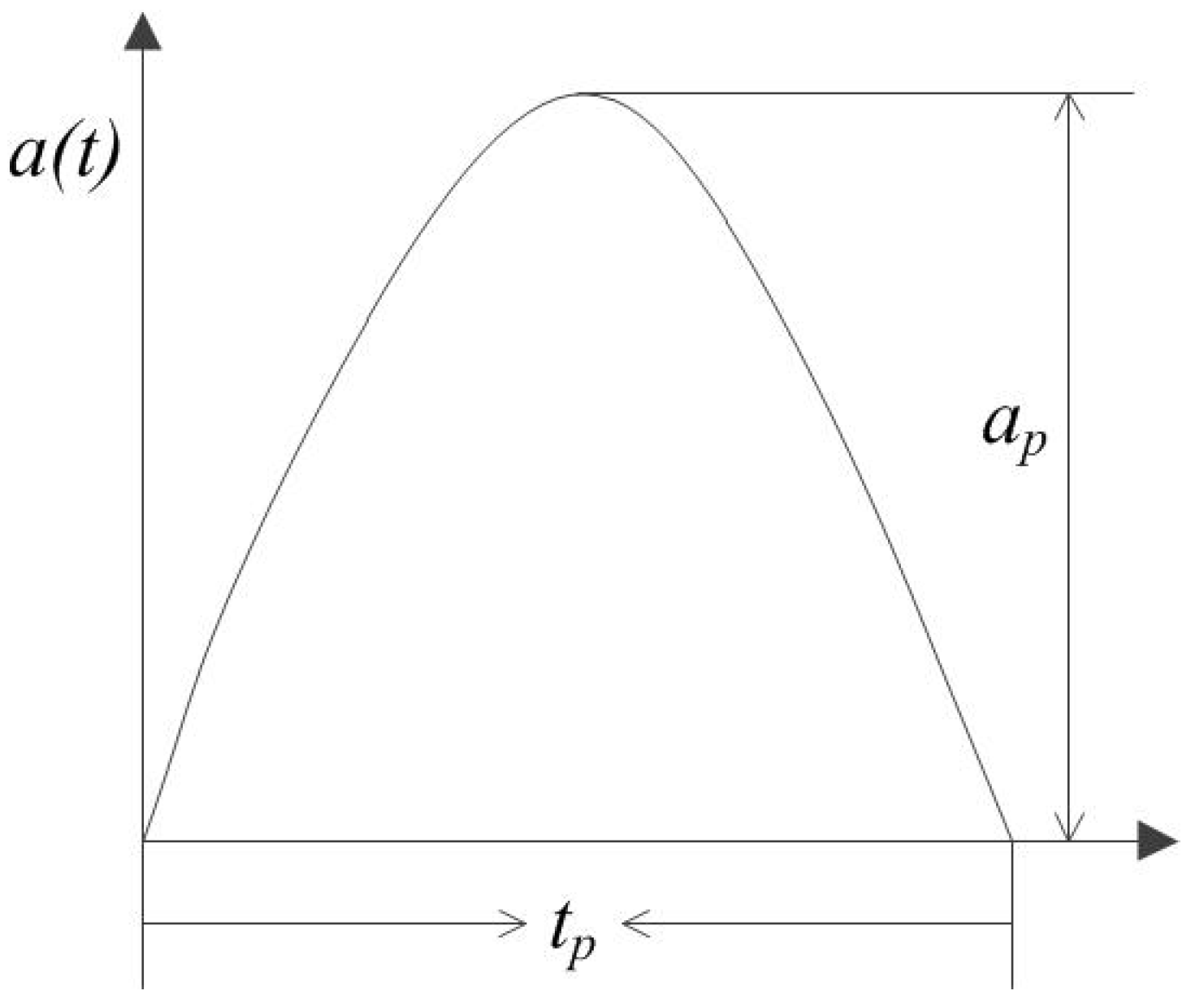
3.1. Theoretical Analysis
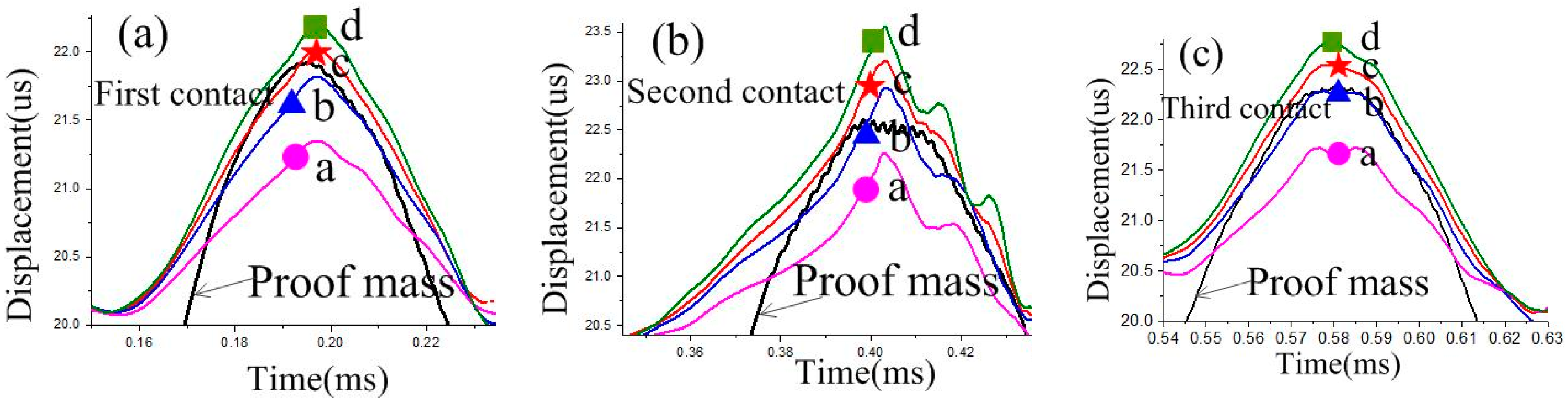
3.2. Dynamic Contact Process Simulation
4. Fabrication and Characterization
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Whitley, M.R.; Kranz, M.; Kesmodel, R.; Burgett, S. Latching shock sensors for health monitoring and quality control. Proc. SPIE 2004, 5717, 185–194. [Google Scholar]
- Ongkodjojo, A.; Tay, F.E.H. Optimized design of a micromachined G-switch based on contactless conFigureuration for health care applications. J. Phys Conf. Ser. 2006, 34, 1044–1052. [Google Scholar] [CrossRef]
- Matsunaga, T.; Esashi, M. Acceleration switch with extended holding time using squeeze film effect for side airbag systems. Sens. Actuators A 2002, 100, 10–17. [Google Scholar] [CrossRef]
- Zimmermann, L.; Ebersohl, J.P.; Le Hung, F.; Berry, J.P.; Baillieu, F.; Rey, P.; Diem, B.; Renard, S.; Caillat, P. Airbag application: A microsystem including a silicon capacitive accelerometer, CMOS switched capacitor electronic and true self-test capability. Sens. Actuators A 1995, 46, 190–195. [Google Scholar] [CrossRef]
- Currano, L.J.; Yu, M.; Balachandran, B. Latching in a MEMS shock sensor: Modeling and experiments. Sens. Actuators A 2010, 159, 41–50. [Google Scholar] [CrossRef]
- Ma, C.W.; Huang, P.C.; Kuo, J.C.; Kuo, C.W.; Yang, Y.J. A Novel Inertial Switch with an Adjustable Acceleration Threshold using a MEMS Digital-to-Analog Converter. Microelectron. Eng. 2013, 110, 374–380. [Google Scholar] [CrossRef]
- Kuo, J.C.; Kuo, P.H.; Lai, Y.T.; Ma, C.W.; Lu, S.S.; Yang, Y.J. A Passive Inertial Switch Using Mwcnt–Hydrogel Composite with Wireless Interrogation Capability. J. Microelectromech. Syst. 2013, 22, 646–654. [Google Scholar] [CrossRef]
- Yang, Z.; Zhu, B.; Chen, W.; Ding, G.; Wang, H.; Zhao, X. Fabrication and characterization of a multidirectional-sensitive contact-enhanced inertial microswitch with an electrophoretic flexible composite fixed electrode. J. Micromech. Microeng. 2012, 22, 45006–45015. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, W.; Yang, Z.; Ding, G.; Wang, H.; Zhao, X. An inertial micro-switch with compliant cantilever fixed electrode for prolong contact time. In Proceedings of the IEEEMEMS 2013 Conference, Taiwan, 20–24 January 2013; pp. 600–603. [Google Scholar]
- Cai, H.; Ding, G.; Yang, Z.; Wang, H.; Zhao, X. Design, simulation and fabrication of a novel contact-enhanced MEMS inertial switch with a movable contact point. J. Micromech. Microeng. 2008, 18, 115033. [Google Scholar] [CrossRef]
- Guo, Z.Y.; Yang, Z.C.; Lin, L.T.; Zhao, Q.C.; Ding, H.T.; Liu, X.S.; Chi, X.Z.; Cui, J.; Yan, G.Z. Design, fabrication and characterization of a latching acceleration switch with multi-contacts independent to the proof-mass. Sens. Actuators A Phys. 2011, 166, 187–192. [Google Scholar] [CrossRef]
- Guo, Z.Y.; Zhao, Q.C.; Lin, L.T.; Ding, H.T.; Liu, X.S.; Cui, J.; Yang, Z.C.; Xie, H.; Yan, G.Z. An acceleration switch with a robust latching mechanism and cylindrical contacts. J. Micromech. Microeng. 2010, 20, 055006. [Google Scholar] [CrossRef]
- Chen, W.; Yang, Z.; Wang, Y.; Ding, G.; Wang, H.; Zhao, X. A vertical driven inertial micro-switch with dual spring to prolong holding time. In Proceedings of the Transducers 2015 International Conference on Solid-State Sensors, Actuators and Microsystems, Anchorage, AK, USA, 21–25 June 2015. [Google Scholar]
- Chen, W.; Wang, Y.; Ding, G.; Wang, H.; Zhao, X.; Yang, Z. Simulation, Fabrication and Characterization of an All-Metal Contact-Enhanced Triaxial Inertial Microswitch with Low Axial Disturbance. Sens. Actuators A Phys. 2014, 220, 194–203. [Google Scholar] [CrossRef]
- Yang, Z.; Ding, G.; Wang, H.; Cai, H.; Zhao, X. Modeling, simulation and characterization of a micromachined acceleration switch with anti-stiction raised strips on the substrate. IEEE Trans. Compon. Packag. Manuf. Technol. 2011, 1, 1195–1204. [Google Scholar] [CrossRef]
- Kovacs Gregory, T.A. Micromachined Transducers Sourcebook; McGraw-Hill: New York, NY, USA, 2000. [Google Scholar]
- Clough, R.W.; Penzien, J.; Griffin, D.S. Dynamics of Structures; McGraw-Hill: New York, NY, USA, 1993. [Google Scholar]
- Bao, M.; Yang, H. Squeeze film air damping in MEMS. Sens. Actuators A Phys. 2007, 136, 3–27. [Google Scholar] [CrossRef]
- Tang, J.; Wang, H.; Liu, R.; Li, X.; Zhang, Z.; Yao, J.; Ding, G. A directly strain measuring method for electroplated nickel micro-tensile test. Microsyst. Technol. 2010, 16, 1839–1844. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Proof Mass | Gap | Movable Electrode | Stationary Electrode | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Geometric parameters | A | a | T | h | h1 | w | b | t | w1 | b1 | t1 |
| Values (µm) | 700 | 400 | 60 | 20 | 20 | 15 | 163 | 10 | 30 | 250 | 20 |
| Performance | Acceleration (g) | Contact Time (μs) | |
|---|---|---|---|
| Simulation | Threshold | 600 | 65 |
| Overload | 800 | 56 | |
| Test | Threshold | 480 | 110 |
| Overload | 602 | 100 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Wang, H.; Kong, D.; Sun, S. The Elastic Contact and Stability Analysis of an Inertial Micro-Switch with a Spring Stationary Electrode. Sensors 2018, 18, 4238. https://doi.org/10.3390/s18124238
Chen W, Wang H, Kong D, Sun S. The Elastic Contact and Stability Analysis of an Inertial Micro-Switch with a Spring Stationary Electrode. Sensors. 2018; 18(12):4238. https://doi.org/10.3390/s18124238
Chicago/Turabian StyleChen, Wenguo, Huiying Wang, Dejian Kong, and Shulei Sun. 2018. "The Elastic Contact and Stability Analysis of an Inertial Micro-Switch with a Spring Stationary Electrode" Sensors 18, no. 12: 4238. https://doi.org/10.3390/s18124238
APA StyleChen, W., Wang, H., Kong, D., & Sun, S. (2018). The Elastic Contact and Stability Analysis of an Inertial Micro-Switch with a Spring Stationary Electrode. Sensors, 18(12), 4238. https://doi.org/10.3390/s18124238