A Novel Monitoring Navigation Method for Cold Atom Interference Gyroscope

Abstract
:1. Introduction
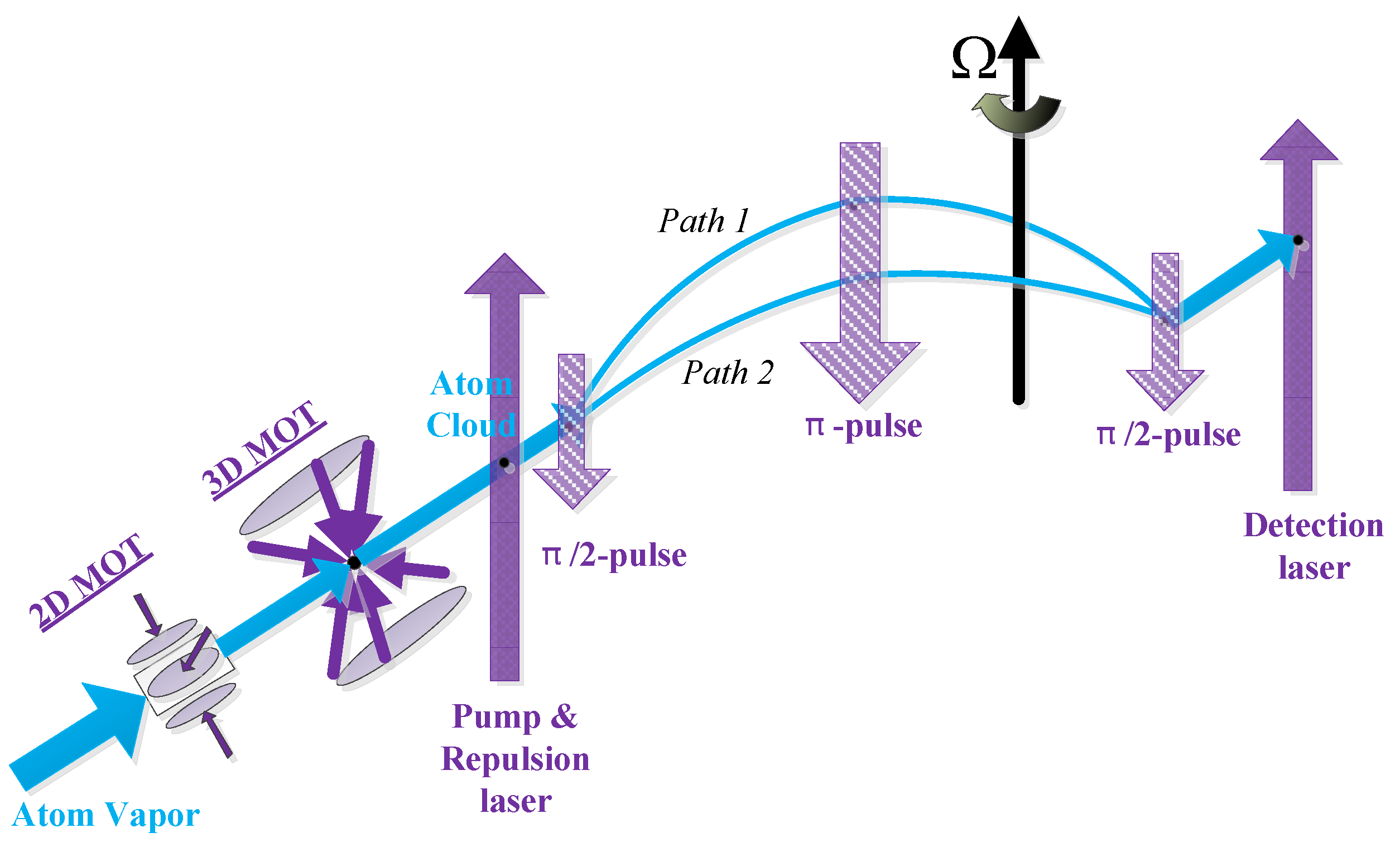
2. Three-Pulse Cold Atom Interferometer for Rotational Measurement
2.1. Atomic Cooling and Trapping Progress
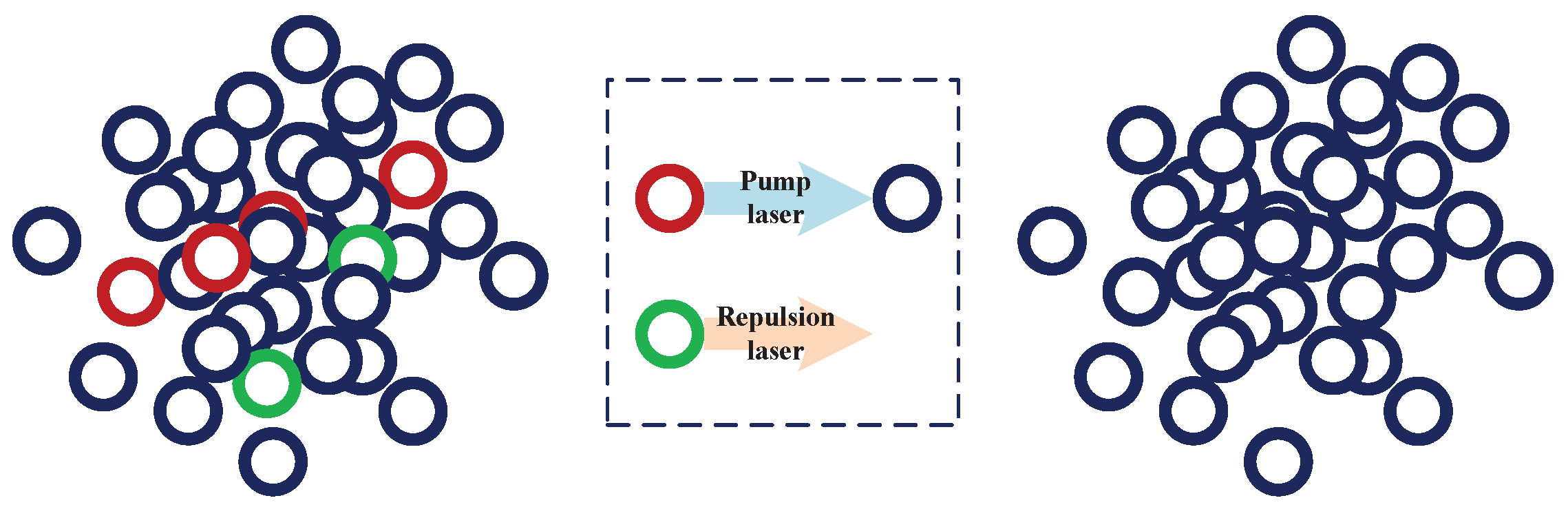
2.2. Atomic State-Selection Progress
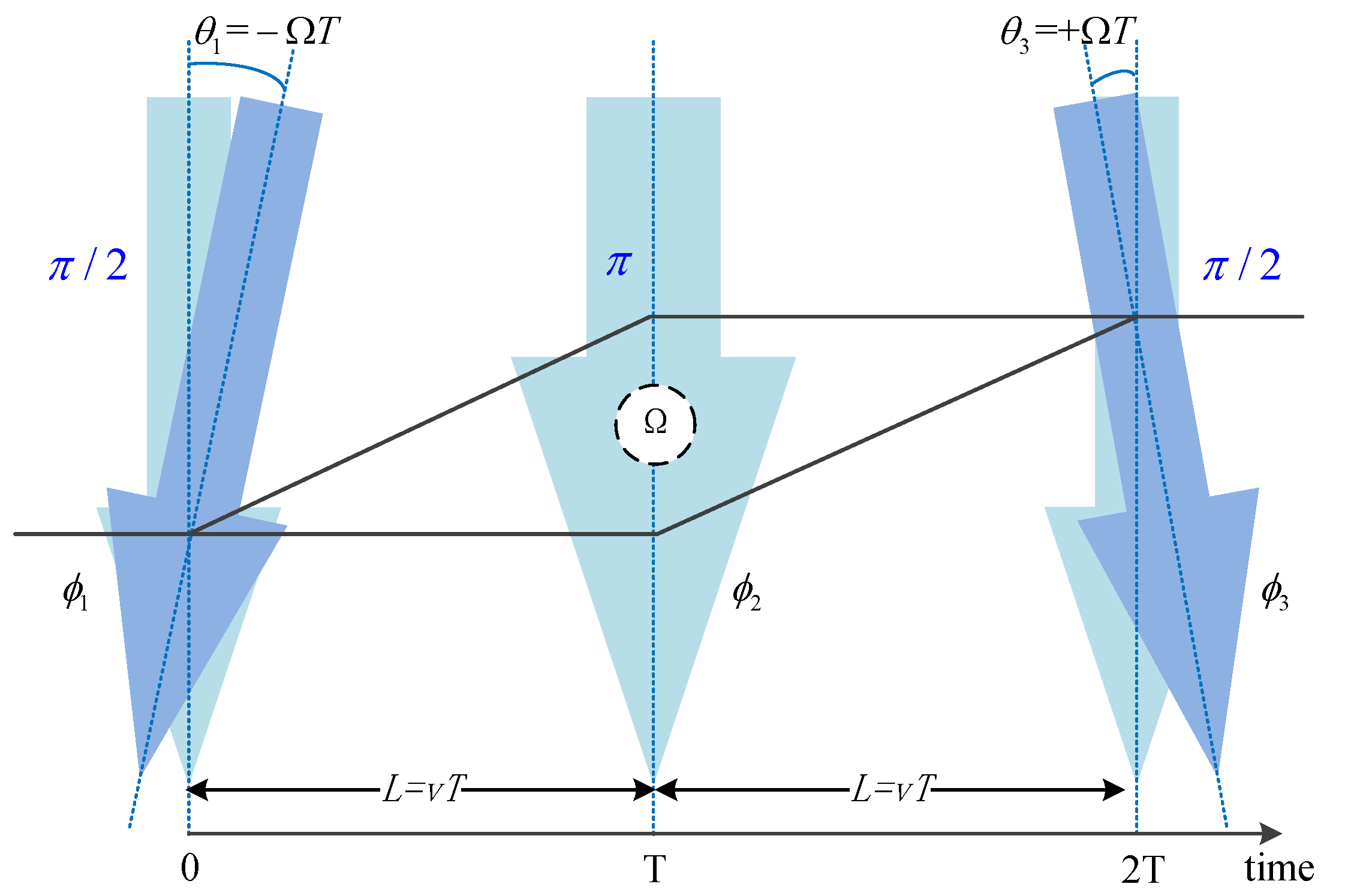
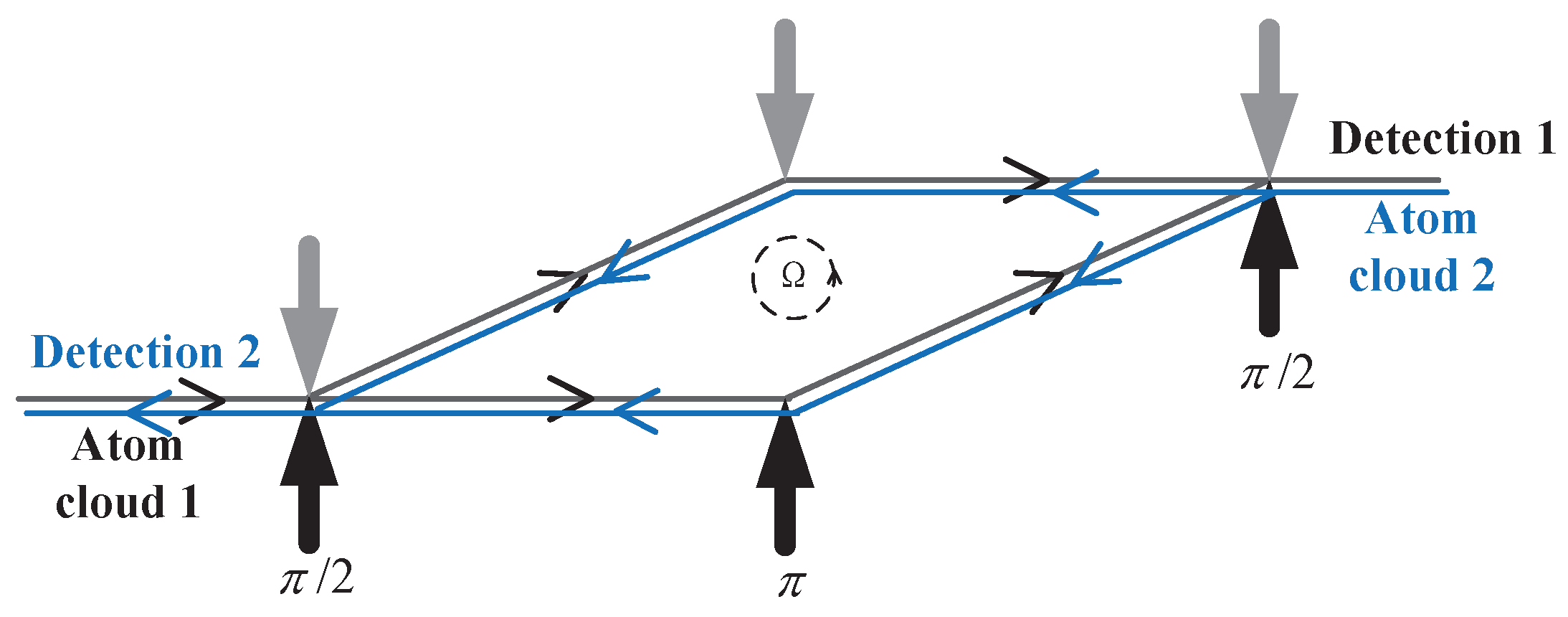
2.3. Atomic Interference Progress
2.4. Fluorescence Detection Progress
3. The Novel Monitoring Navigation Method of Triaxial CAIG & FOG
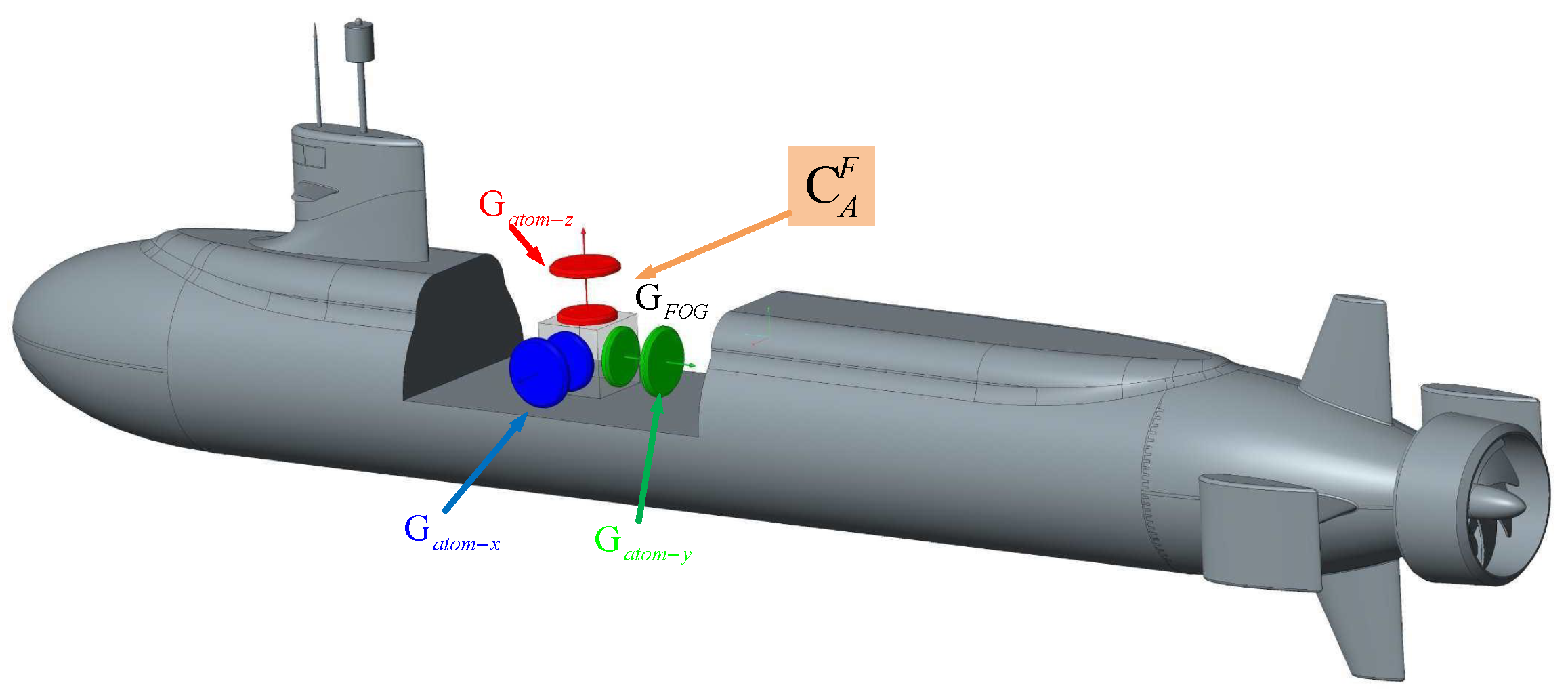
3.1. The Monitoring Navigation Scheme of Triaxial CAIG & FOG
3.2. The Observability Analysis of Monitoring Navigation System
- In the static mode and constant speed mode, , which means the system isn’t completely observable. It is worth noting that in this monitoring navigation system, the accurate estimation of the triaxial bias and the misalignment angle is indispensable, otherwise, the monitoring system loses its accuracy.
- In constant acceleration mode of the underwater vehicle, the latitude and the height change and affect the measurement of earth’s rotation, but these changes will be submerged in the gyro noise and is difficult to be measured.
- In the case of triaxial sway mode, (27) can be realized in several swing periods. The bias and misalignment angle are completely observable. In fact, underwater surge sway is a necessary condition for our monitoring system to achieve identification. On the other hand, when in land vehicles or other carriers, there may be bumps or other motions similar like swaying, the experiment results will be shown in the field test in Section 5.
4. Simulation Experiment of Monitoring Navigation System
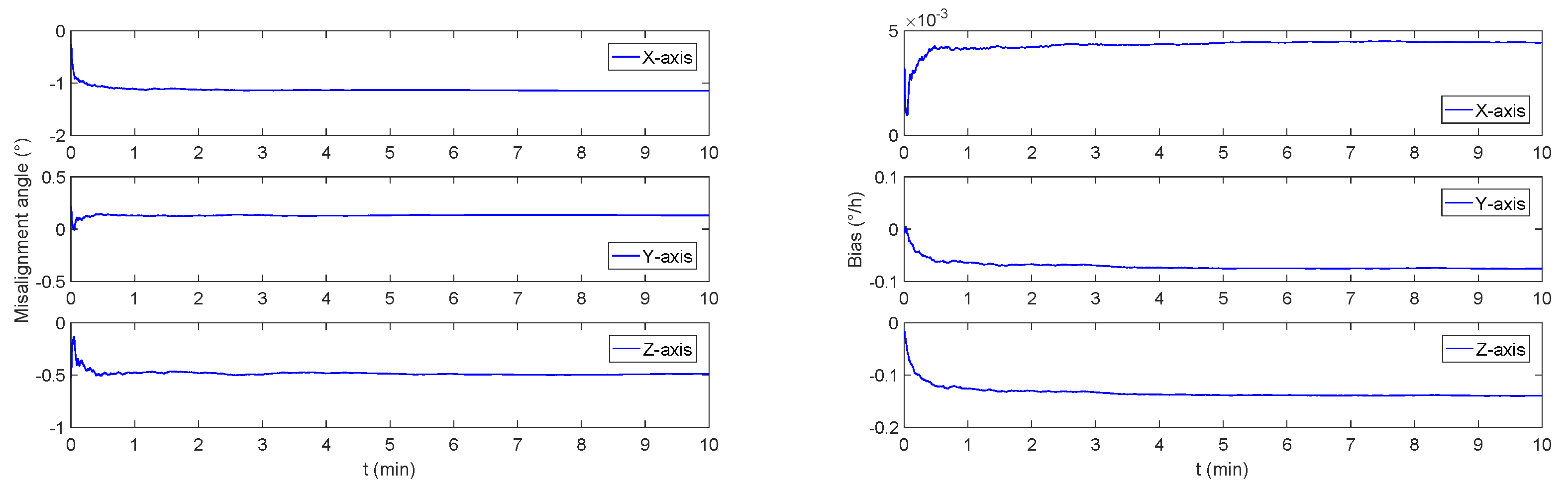
4.1. Constant Speed Mode
4.2. Constant Accelerate Mode
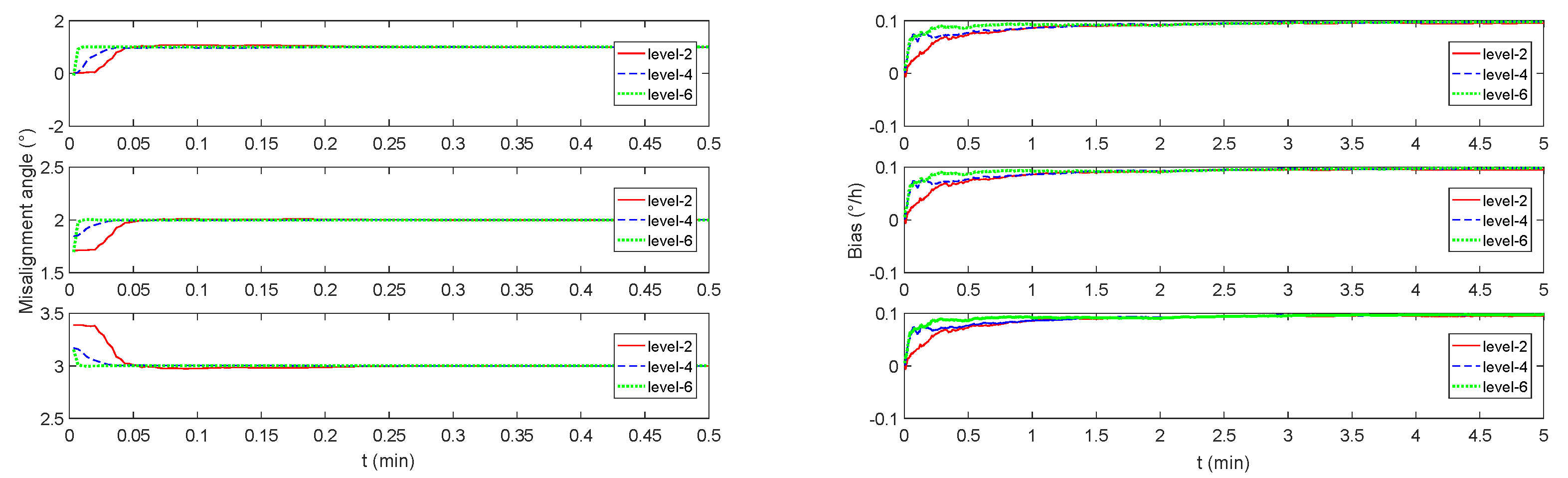
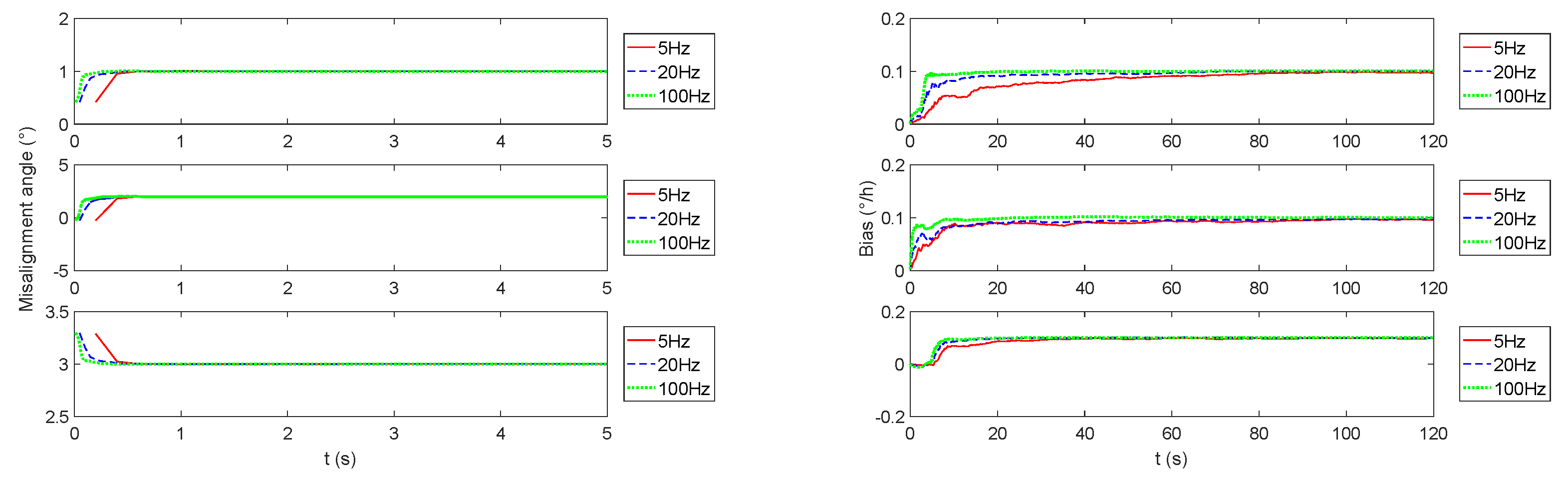
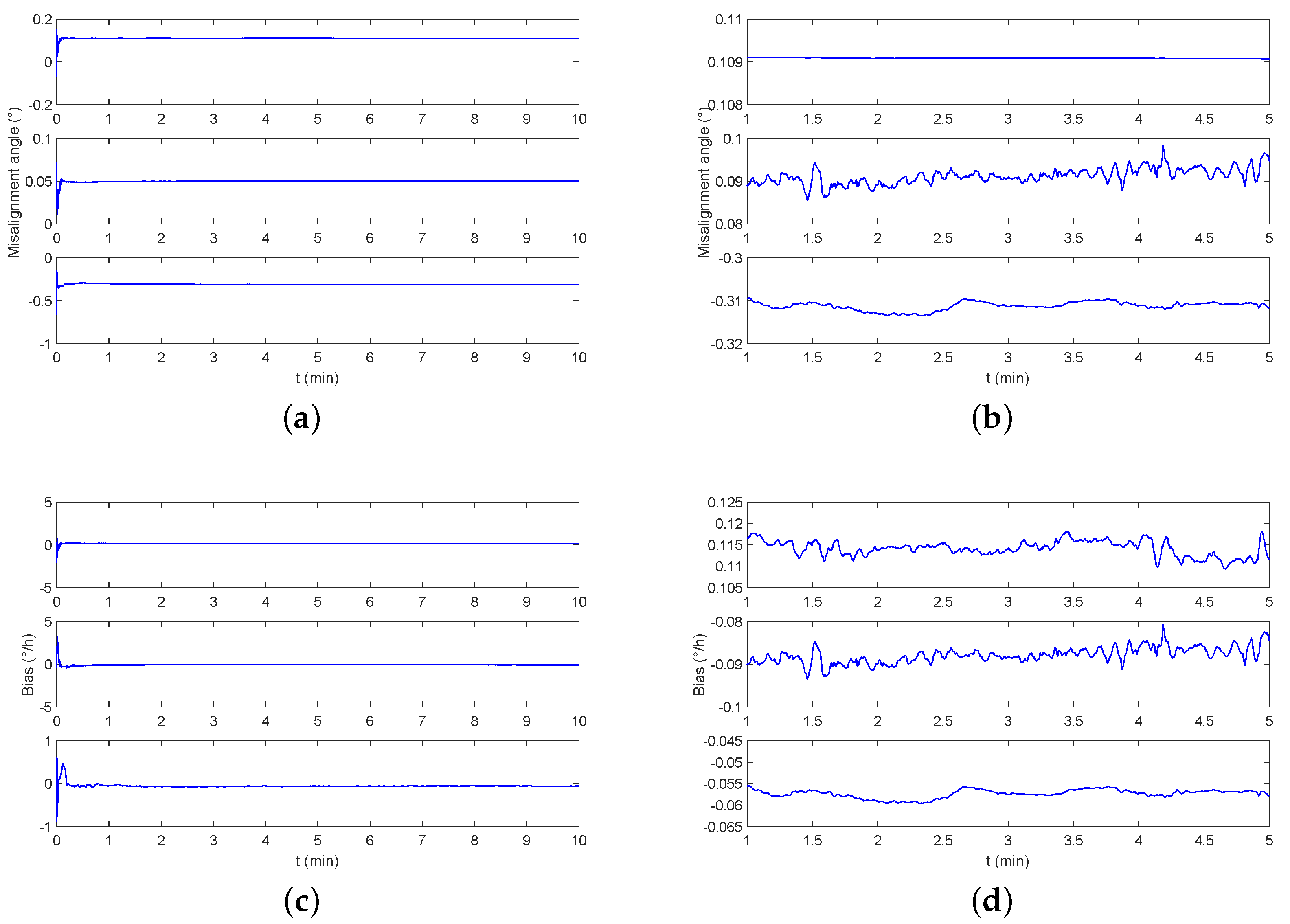
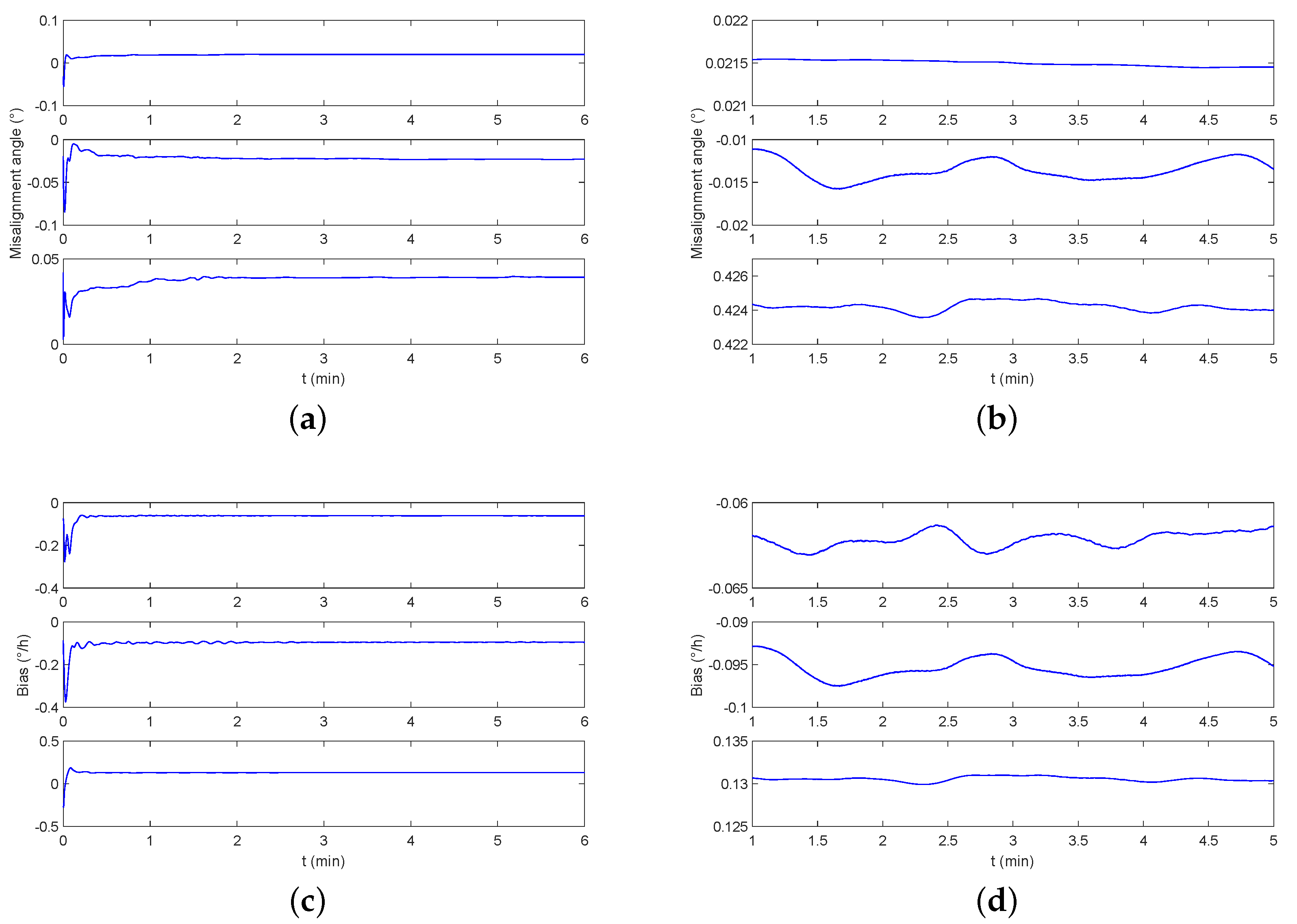
4.3. Triaxial Swing Mode
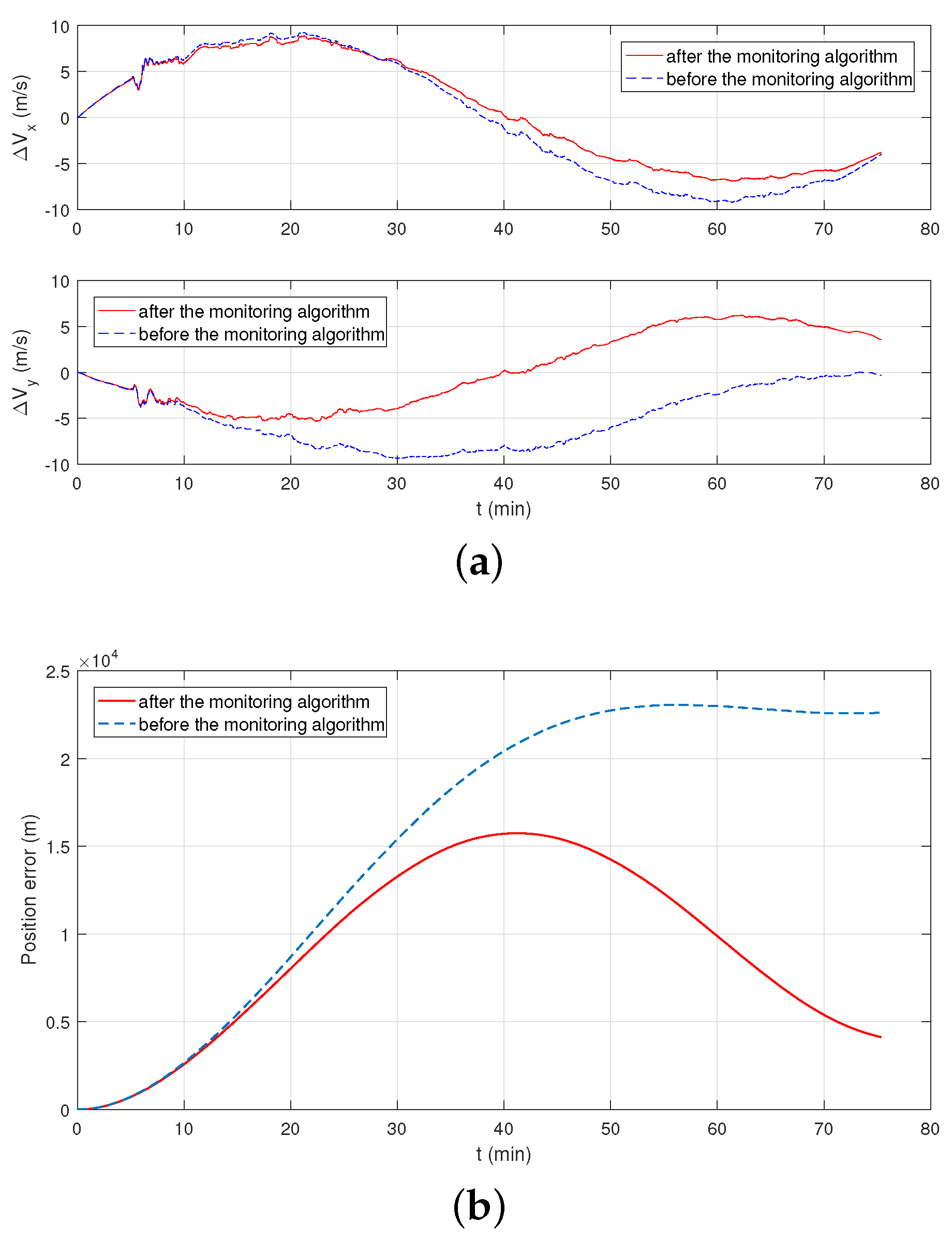
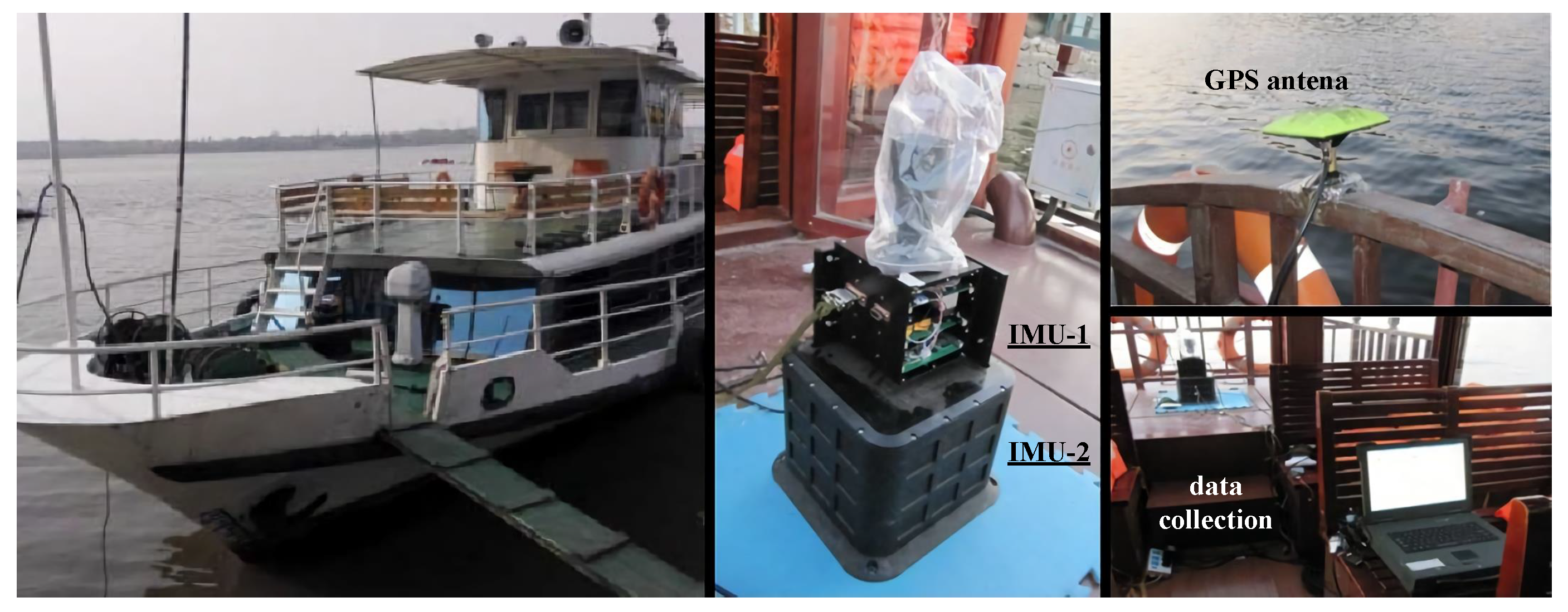
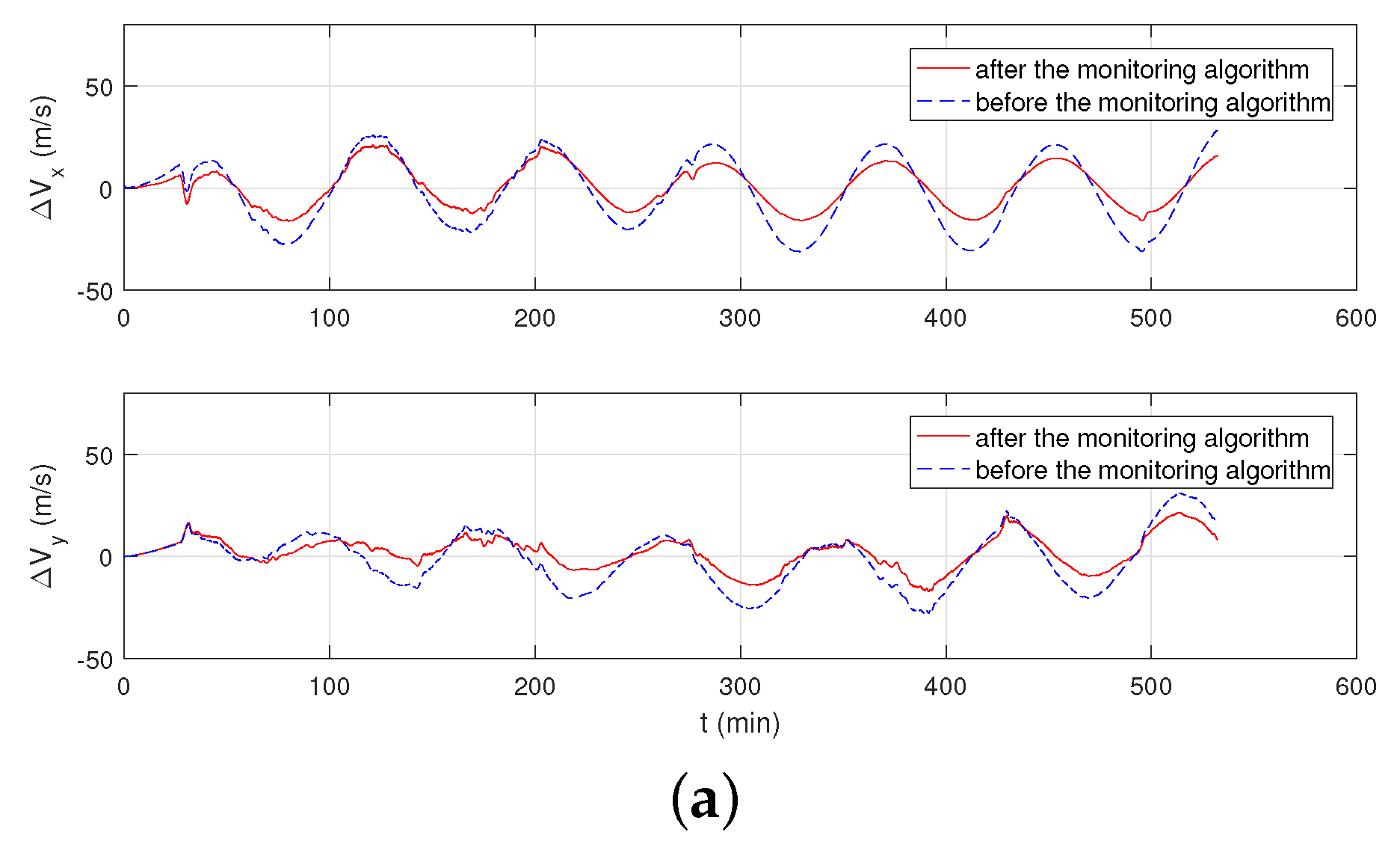
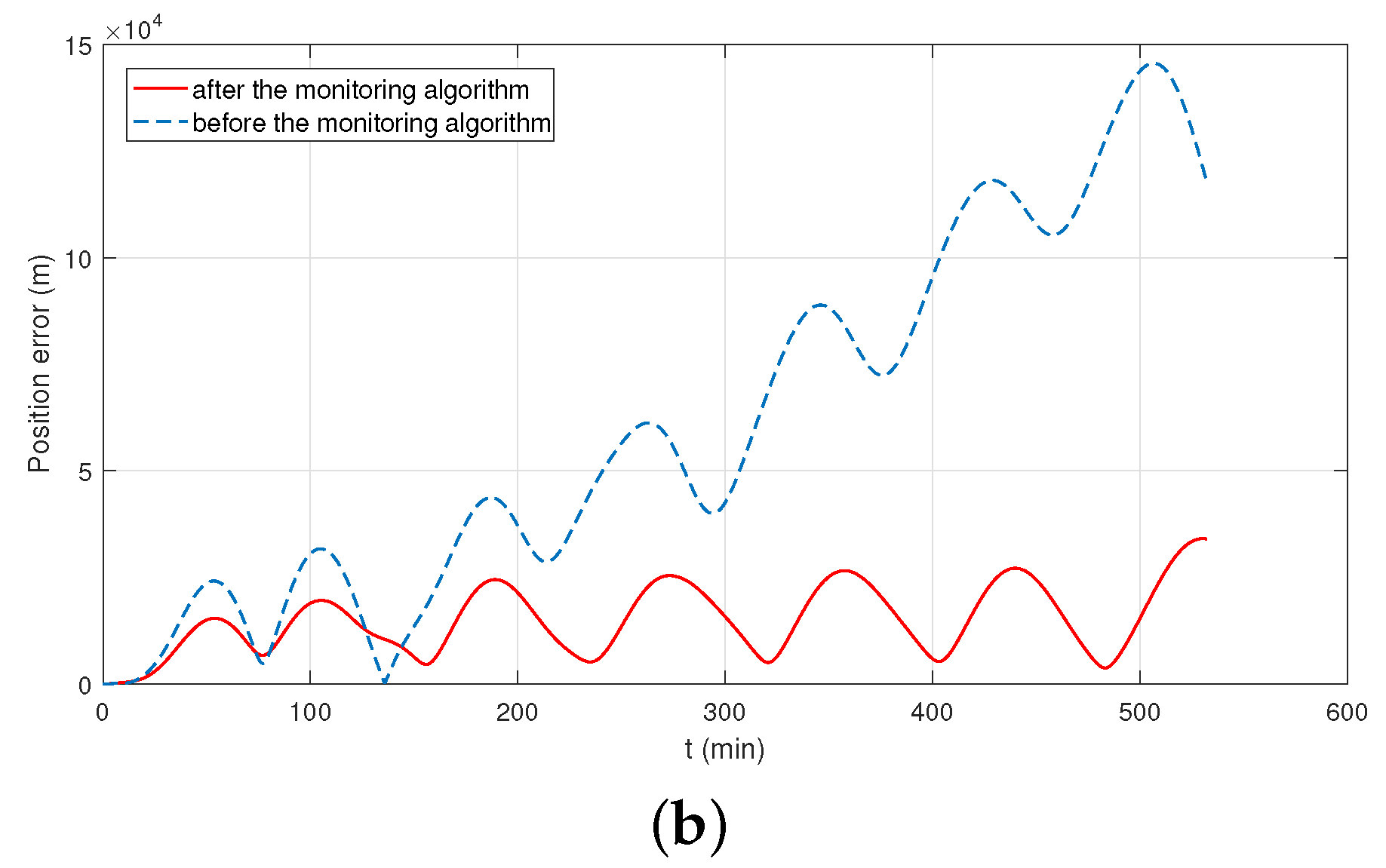
5. The Field Test of the Monitoring Navigation Method
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CAIG | Cold Atom Interference Gyroscope |
| FOG | Fiber-optic Gyroscope |
| INS | Inertial Navigation System |
| SINS | Strapdown Inertial Navigation System |
| IMU | Inertial Measurement Unit |
| PWCS | Piece-wise Constant Systems |
References
- Xia, X.W.; Sun, Q. Initial Alignment Algorithm Based on the DMCS Method in Single-Axis RSINS with Large Azimuth Misalignment Angles for Submarines. Sensors 2018, 18, 2123. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Yu, F.; Wang, Y.; Wang, K. A Robust SINS/VO Integrated Navigation Algorithm Based on RHCKF for Unmanned Ground Vehicles. IEEE Access 2018, 6, 56828–56838. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, F.; Gao, W.; Wang, Y. An Improved Strapdown Inertial Navigation System Initial Alignment Algorithm for Unmanned Vehicles. Sensors 2018, 18, 3297. [Google Scholar] [CrossRef] [PubMed]
- Sun, Q.; Tian, Y.; Diao, M. Cooperative Localization Algorithm based on Hybrid Topology Architecture for Multiple Mobile Robot System. IEEE Internet Things J. 2018. [Google Scholar] [CrossRef]
- Hashimoto, M.; Cabuz, C.; Minami, K.; Esashi, M. Silicon resonant angular rate sensor using electromagnetic excitation and capacitive detection. J. Micromech. Microeng. 1995, 5, 219. [Google Scholar] [CrossRef]
- Söderkvist, J. Micromachined gyroscopes. Sens. Actuators A Phys. 1994, 43, 65–71. [Google Scholar] [CrossRef]
- Lawrence, A. Modern Inertial Technology: Navigation, Guidance, and Control; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Lefevre, H.C. The Fiber-Optic Gyroscope; Artech House: Norwood, MA, USA, 2014. [Google Scholar]
- Sun, Q.; Diao, M.; Zhang, Y.; Li, Y. Cooperative Localization Algorithm for Multiple Mobile Robot System in Indoor Environment Based on Variance Component Estimation. Symmetry 2017, 9, 94. [Google Scholar] [CrossRef]
- Gustavson, T.; Bouyer, P.; Kasevich, M. Precision rotation measurements with an atom interferometer gyroscope. Phys. Rev. Lett. 1997, 78, 2046. [Google Scholar] [CrossRef]
- Kasevich, M.; Chu, S. Atomic interferometry using stimulated Raman transitions. Phys. Rev. Lett. 1991, 67, 181. [Google Scholar] [CrossRef]
- Gerginov, V.; Nemitz, N.; Weyers, S.; Schröder, R.; Griebsch, D.; Wynands, R. Uncertainty evaluation of the caesium fountain clock PTB-CSF2. Metrologia 2009, 47, 65. [Google Scholar] [CrossRef]
- Levi, F.; Calonico, D.; Calosso, C.E.; Godone, A.; Micalizio, S.; Costanzo, G.A. Accuracy evaluation of ITCsF2: A nitrogen cooled caesium fountain. Metrologia 2014, 51, 270. [Google Scholar] [CrossRef]
- Heavner, T.P.; Donley, E.A.; Levi, F.; Costanzo, G.; Parker, T.E.; Shirley, J.H.; Ashby, N.; Barlow, S.; Jefferts, S. First accuracy evaluation of NIST-F2. Metrologia 2014, 51, 174. [Google Scholar] [CrossRef]
- Fang, F.; Chen, W.; Liu, K.; Liu, N.; Suo, R.; Li, T. Design of the new NIM6 fountain with collecting atoms from a 3D MOT loading optical molasses. In Proceedings of the 2015 Joint Conference of the IEEE International Frequency Control Symposium & the European Frequency and Time Forum (FCS), Denver, CO, USA, 12–16 April 2015; pp. 492–494. [Google Scholar]
- Fang, F.; Li, M.; Lin, P.; Chen, W.; Liu, N.; Lin, Y.; Wang, P.; Liu, K.; Suo, R.; Li, T. NIM5 Cs fountain clock and its evaluation. Metrologia 2015, 52, 454. [Google Scholar] [CrossRef]
- Kasevich, M.; Chu, S. Measurement of the gravitational acceleration of an atom with a light-pulse atom interferometer. Appl. Phys. B 1992, 54, 321–332. [Google Scholar] [CrossRef]
- Malossi, N.; Bodart, Q.; Merlet, S.; Lévèque, T.; Landragin, A.; Dos Santos, F.P. Double diffraction in an atomic gravimeter. Phys. Rev. A 2010, 81, 013617. [Google Scholar] [CrossRef]
- Merlet, S. Détermination aBsolue De G Dans Le Cadre De L’expérience De La Balance Du Watt. Ph.D. Thesis, Observatoire de Paris, Paris, France, 2010. [Google Scholar]
- Merlet, S.; Bodart, Q.; Malossi, N.; Landragin, A.; Dos Santos, F.P.; Gitlein, O.; Timmen, L. Comparison between two mobile absolute gravimeters: Optical versus atomic interferometers. Metrologia 2010, 47, L9. [Google Scholar] [CrossRef]
- Schmidt, M.; Senger, A.; Hauth, M.; Freier, C.; Schkolnik, V.; Peters, A. A mobile high-precision absolute gravimeter based on atom interferometry. Gyroscopy Navig. 2011, 2, 170. [Google Scholar] [CrossRef]
- Fixler, J.B.; Foster, G.; McGuirk, J.; Kasevich, M. Atom interferometer measurement of the Newtonian constant of gravity. Science 2007, 315, 74–77. [Google Scholar] [CrossRef]
- Cadoret, M.; De Mirandes, E.; Cladé, P.; Guellati-Khélifa, S.; Schwob, C.; Nez, F.; Julien, L.; Biraben, F. Combination of Bloch oscillations with a Ramsey-Bordé interferometer: New determination of the fine structure constant. Phys. Rev. Lett. 2008, 101, 230801. [Google Scholar] [CrossRef]
- Müller, H.; Peters, A.; Chu, S. A precision measurement of the gravitational redshift by the interference of matter waves. Nature 2010, 463, 926. [Google Scholar] [CrossRef]
- Rosi, G.; Sorrentino, F.; Cacciapuoti, L.; Prevedelli, M.; Tino, G. Precision measurement of the Newtonian gravitational constant using cold atoms. Nature 2014, 510, 518. [Google Scholar] [CrossRef] [PubMed]
- Jin, W. Precision measurement with atom interferometry. Chin. Phys. B 2015, 24, 053702. [Google Scholar]
- Gustavson, T.; Landragin, A.; Kasevich, M. Rotation sensing with a dual atom-interferometer Sagnac gyroscope. Class. Quantum Gravity 2000, 17, 2385. [Google Scholar] [CrossRef]
- Stockton, J.; Takase, K.; Kasevich, M. Absolute geodetic rotation measurement using atom interferometry. Phys. Rev. Lett. 2011, 107, 133001. [Google Scholar] [CrossRef] [PubMed]
- Riou, I.; Mielec, N.; Lefèvre, G.; Prevedelli, M.; Landragin, A.; Bouyer, P.; Bertoldi, A.; Geiger, R.; Canuel, B. A marginally stable optical resonator for enhanced atom interferometry. J. Phys. B Atomic Mol. Opt. Phys. 2017, 50, 155002. [Google Scholar] [CrossRef] [Green Version]
- Yao, Z.W.; Lu, S.B.; Li, R.B.; Luo, J.; Wang, J.; Zhan, M.S. Calibration of atomic trajectories in a large-area dual-atom-interferometer gyroscope. Phys. Rev. A 2018, 97, 013620. [Google Scholar] [CrossRef] [Green Version]
- Battelier, B.; Barrett, B.; Fouché, L.; Chichet, L.; Antoni-Micollier, L.; Porte, H.; Napolitano, F.; Lautier, J.; Landragin, A.; Bouyer, P. Development of compact cold-atom sensors for inertial navigation. Quantum Opt. Int. Soc. Opt. Photonics 2016, 9900, 990004. [Google Scholar] [Green Version]
- Bochkati, M.; Schön, S.; Schlippert, D.; Schubert, C.; Rasel, E. Could cold atom interferometry sensors be the future inertial sensors?—First simulation results. In Proceedings of the Inertial Sensors and Systems (ISS), Karlsruhe, Germany, 19–20 September 2017; pp. 1–20. [Google Scholar]
- Li, Y.; Niu, X.; Zhang, Q.; Zhang, H.; Shi, C. An in situ hand calibration method using a pseudo-observation scheme for low-end inertial measurement units. Meas. Sci. Technol. 2012, 23, 105104. [Google Scholar] [CrossRef]
- Lacambre, J.B.; Narozny, M.; Louge, J.M. Limitations of the unscented Kalman filter for the attitude determination on an inertial navigation system. In Proceedings of the 2013 IEEE Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Napa, CA, USA, 11–14 August 2013; pp. 187–192. [Google Scholar]
- Lawall, J.; Bardou, F.; Bouchaud, J.P.; Saubamea, B.; Bigelow, N.; Leduc, M.; Aspect, A.; Cohen-Tannoudji, C. Recent Advances in Subrecoil Laser Cooling. AIP Conf. Proc. 1994, 323, 193–210. [Google Scholar]
- Allred, J.; Lyman, R.; Kornack, T.; Romalis, M. High-sensitivity atomic magnetometer unaffected by spin-exchange relaxation. Phys. Rev. Lett. 2002, 89, 130801. [Google Scholar] [CrossRef]
- Neuman, K.C.; Block, S.M. Optical trapping. Rev. Sci. Instrum. 2004, 75, 2787–2809. [Google Scholar] [CrossRef] [PubMed]
- Ashkin, A. Optical trapping and manipulation of neutral particles using lasers. Proc. Natl. Acad. Sci. USA 1997, 94, 4853–4860. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gillot, J.; Gauguet, A.; Büchner, M.; Vigué, J. Optical pumping of a lithium atomic beam for atom interferometry. Eur. Phys. J. D 2013, 67, 263. [Google Scholar] [CrossRef]
- Bouyer, P. The centenary of Sagnac effect and its applications: From electromagnetic to matter waves. Gyroscopy Navig. 2014, 5, 20–26. [Google Scholar] [CrossRef]
- Rocco, E.; Palmer, R.; Valenzuela, T.; Boyer, V.; Freise, A.; Bongs, K. Fluorescence detection at the atom shot noise limit for atom interferometry. New J. Phys. 2014, 16, 093046. [Google Scholar] [CrossRef] [Green Version]
- Goshen-Meskin, D.; Bar-Itzhack, I. Observability analysis of piece-wise constant systems. I. Theory. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 1056–1067. [Google Scholar] [CrossRef]
- Salvesen, N.; Tuck, E.; Faltinsen, O. Ship motions and sea loads. Trans. SNAME 1970, 78, 250–287. [Google Scholar]
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1993; Volume 1. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Wave Height (m) | Roll | Pitch | Heading | |||
|---|---|---|---|---|---|---|---|
| Amplitude | Period | Amplitude | Period | Amplitude | Period | ||
| level-2 | 0.1∼0.5 | 0.50 | 20.00 | 0.20 | 30.00 | 0.30 | 30.00 |
| level-4 | 1.25∼2.5 | 4.75 | 21.00 | 0.64 | 10.00 | 0.70 | 18.61 |
| level-6 | 4.0∼6.0 | 12.57 | 17.42 | 1.87 | 10.02 | 1.63 | 17.03 |
| Sea Conditions | Bias (/h) | Misalignment Angle () | Convergence Time (s) | ||||
|---|---|---|---|---|---|---|---|
| level-2 | 0.0954448 | 0.0996846 | 0.1014449 | 1.000 | 2.000 | 3.000 | 74.60 |
| level-4 | 0.0996374 | 0.0994061 | 0.1005486 | 1.000 | 2.000 | 3.000 | 64.40 |
| level-6 | 0.0982397 | 0.0968095 | 0.0989947 | 1.000 | 2.000 | 3.000 | 44.80 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Gao, W.; Li, Q.; Li, R.; Yao, Z.; Lu, S. A Novel Monitoring Navigation Method for Cold Atom Interference Gyroscope. Sensors 2019, 19, 222. https://doi.org/10.3390/s19020222
Zhang L, Gao W, Li Q, Li R, Yao Z, Lu S. A Novel Monitoring Navigation Method for Cold Atom Interference Gyroscope. Sensors. 2019; 19(2):222. https://doi.org/10.3390/s19020222
Chicago/Turabian StyleZhang, Lin, Wei Gao, Qian Li, Runbing Li, Zhanwei Yao, and Sibin Lu. 2019. "A Novel Monitoring Navigation Method for Cold Atom Interference Gyroscope" Sensors 19, no. 2: 222. https://doi.org/10.3390/s19020222
APA StyleZhang, L., Gao, W., Li, Q., Li, R., Yao, Z., & Lu, S. (2019). A Novel Monitoring Navigation Method for Cold Atom Interference Gyroscope. Sensors, 19(2), 222. https://doi.org/10.3390/s19020222