Single Infrared Image-Based Stripe Nonuniformity Correction via a Two-Stage Filtering Method

Abstract
:1. Introduction
2. Related Work
3. Prior Foundation
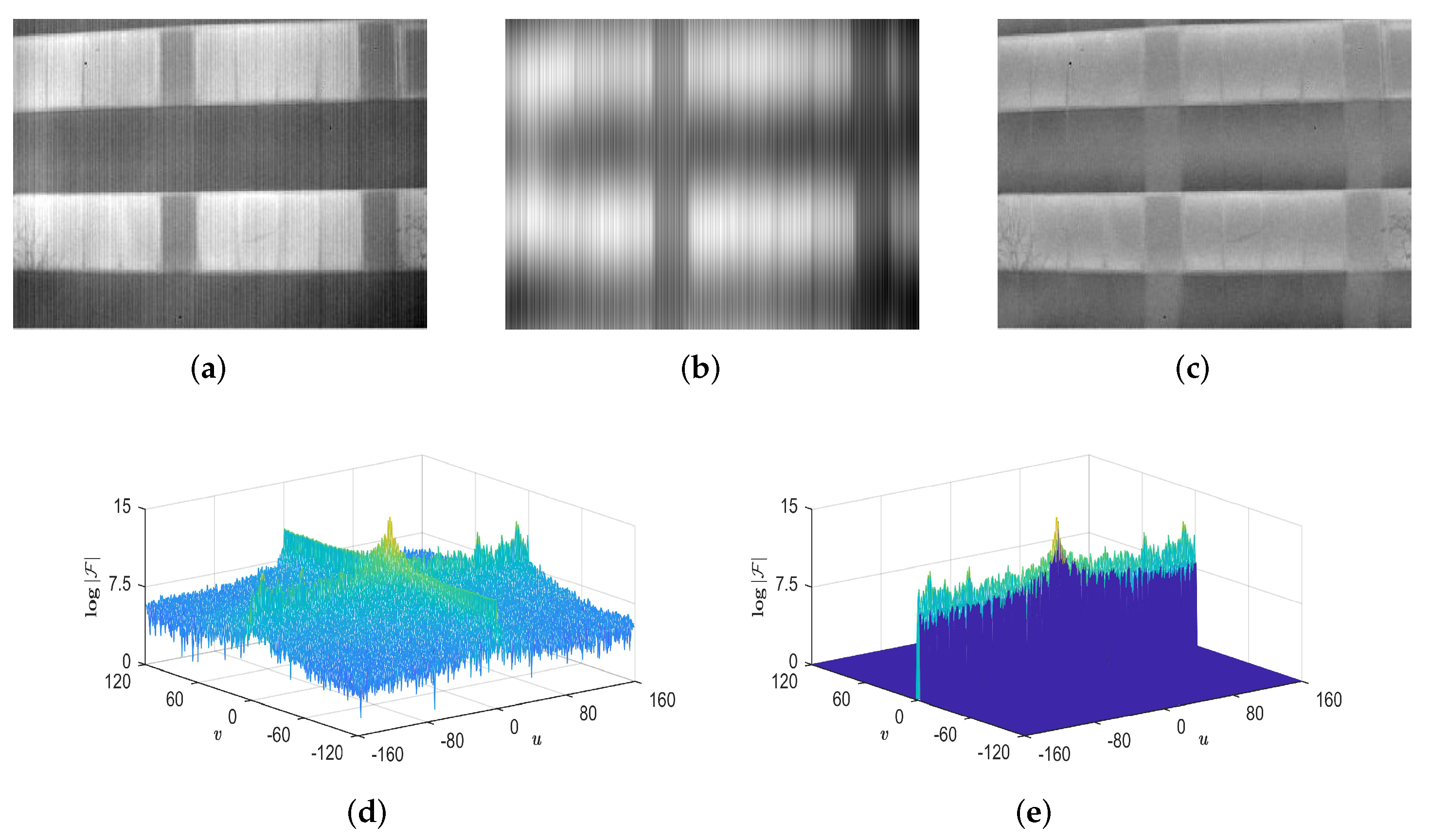
3.1. Spectral Analysis of Stripe Noise
3.2. Observation Model
4. Proposed Method
4.1. Stage 1: Spectral Filtering with Stripe Notch Filter
4.2. Stage 2: Spatial Filtering with 1-D Row Smoothing Filter
5. Implementation Details
5.1. Notes on Filters
5.2. Procedure
| Algorithm 1. Two-stage filtering method for single IR image stripe nonuniformity correction |
| Input: The original IR image D. Stage 1: Spectral filtering with stripe notch filter . Parameter: The width K of ’s rejection region. Forward transformation. Apply 2-D FFT on D to obtain the corresponding Fourier spectrum, and then calculate the amplitude and the phase separately. Filtration. Correlate with to get the filtered amplitude , and calculate the modified Fourier spectrum . Backward transformation. Apply inverse 2-D FFT, and obtain the structure layer . Stage 2: Spatial filtering with 1-D row smoothing filter T. (Use mean filter and gaussian filter ) Parameter: The total number of filtering iterations . Initialization: Let the residual image be the initial grayscale layer . for to do Perform spatial filtering alternately on by and to refine . end for Output: The final corrected result . |
6. Experiments
6.1. Data Sets
6.2. Test on Simulated Images
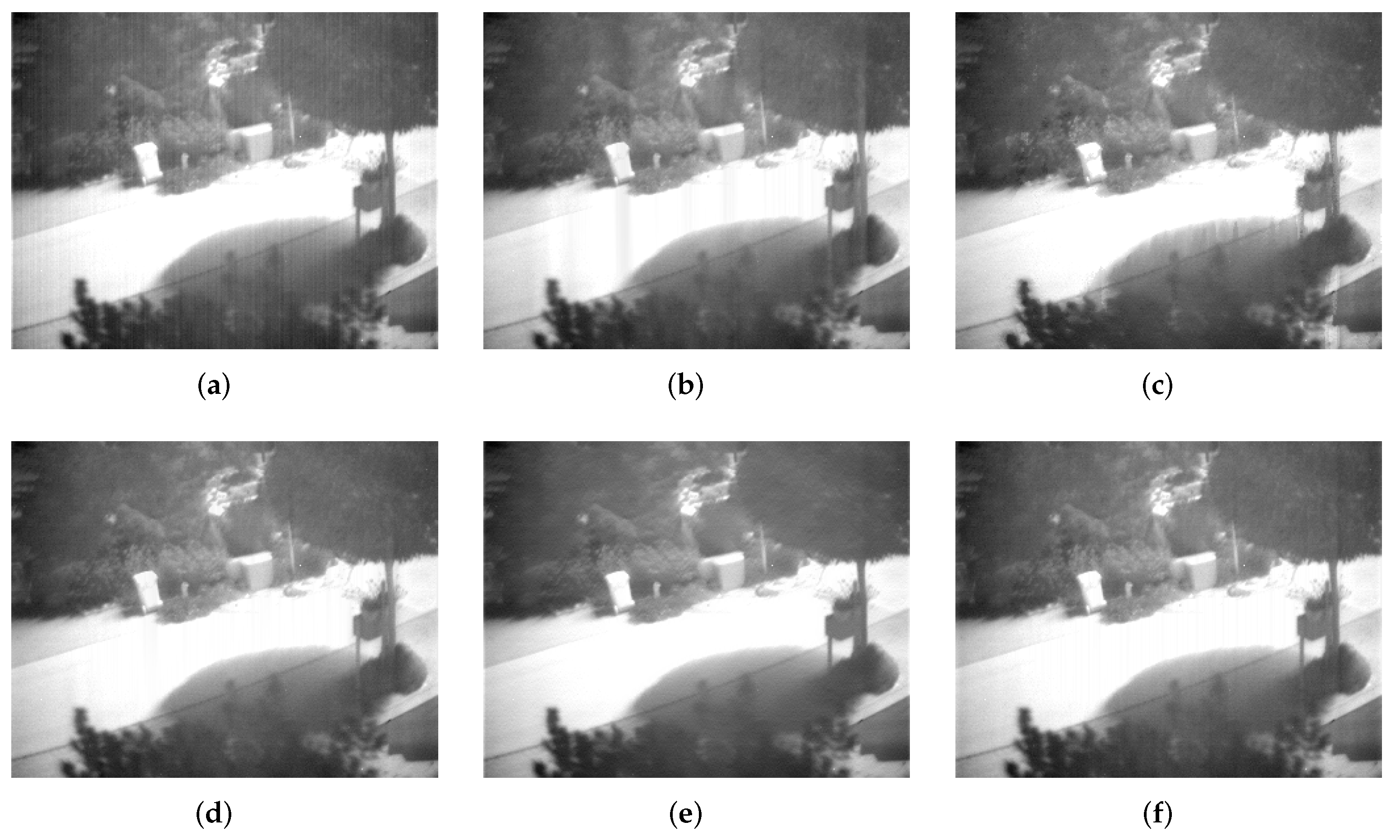
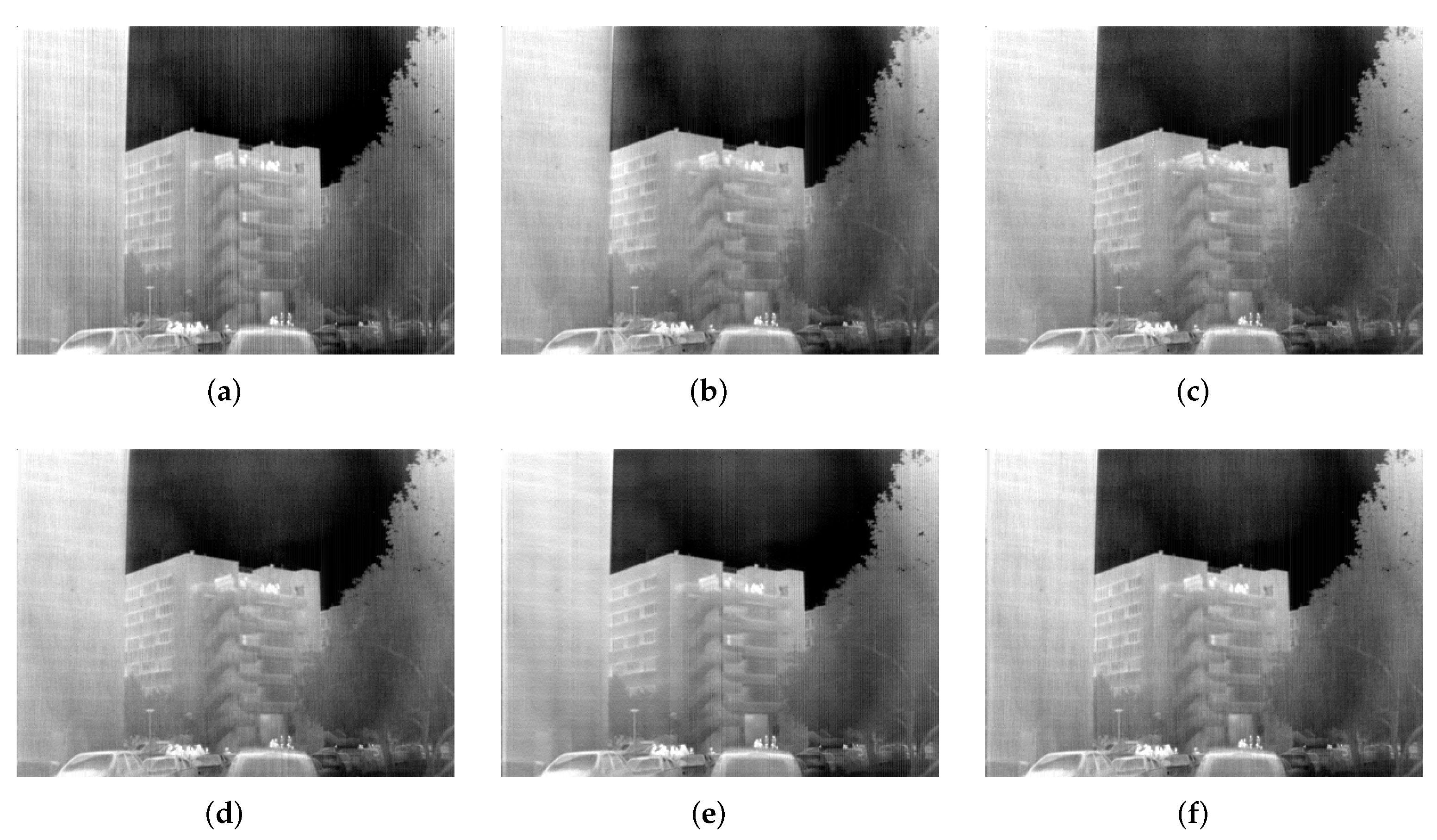
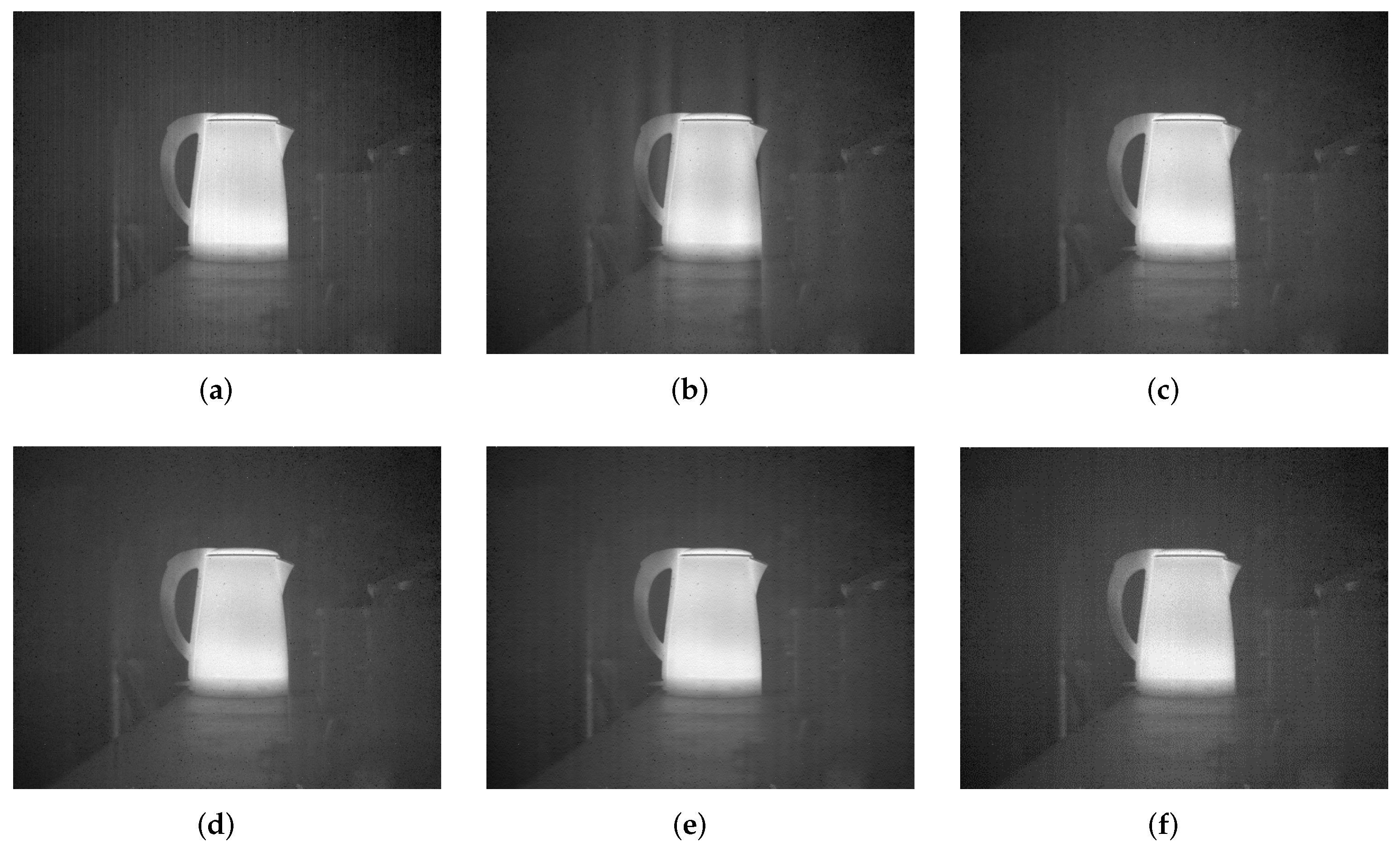
6.3. Test on Raw IR Images
6.4. Time Consumption
6.5. Parameter Analysis
6.6. More Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhou, D.; Wang, D.; Huo, L.; Liu, R.; Jia, P. Scene-based nonuniformity correction for airborne point target detection systems. Opt. Express 2017, 25, 14210–14226. [Google Scholar] [CrossRef] [PubMed]
- Meza, P.; Torres, S.; Carrillo, R. Improved infrared face identification performance using nonuniformity correction techniques. In Proceedings of the 10th International Conference on Advanced Concepts for Intelligent Vision Systems (ACIVS), Pins Les Juan, France, 20–24 October 2008; pp. 1115–1123. [Google Scholar]
- Milton, A.F.; Barone, F.R.; Kruer, M.R. Influence of nonuniformity on infrared focal plane array performance. Opt. Eng. 1985, 24, 855–862. [Google Scholar] [CrossRef]
- Goodall, T.R.; Bovik, A.C.; Paulter, N.G. Tasking on natural statistics of infrared images. IEEE Trans. Image Process. 2016, 25, 65–79. [Google Scholar] [CrossRef] [PubMed]
- Dereniak, E.L. Linear theory of nonuniformity correction in infrared staring sensors. Opt. Eng. 1993, 32, 1854–1859. [Google Scholar]
- Wang, Y.; Chen, J.; Liu, Y.; Xue, Y. Study on two-point multi-section IRFPA nonuniformity correction algorithm. J. Infrared Millim. Waves 2003, 22, 415–418. [Google Scholar]
- Zhou, H.; Liu, S.; Lai, R.; Wang, D.; Cheng, Y. Solution for the nonuniformity correction of infrared focal plane arrays. Appl. Opt. 2005, 44, 2928–2932. [Google Scholar] [CrossRef] [PubMed]
- Harris, J.G.; Chiang, Y.M. Nonuniformity correction of infrared image sequences using the constant-statistics constraint. IEEE Trans. Image Process. 1999, 8, 1148–1151. [Google Scholar] [CrossRef] [PubMed]
- Scribner, D.A.; Sarkady, K.A.; Kruer, M.R.; Caulfield, J.T.; Hunt, J.D.; Herman, C. Adaptive nonuniformity correction for IR focal-plane arrays using neural networks. In Infrared Sensors: Detectors, Electronics, and Signal Processing; International Society for Optics and Photonics: San Diego, CA, USA, 1991; pp. 100–110. [Google Scholar]
- Torres, S.N.; Hayat, M.M. Kalman filtering for adaptive nonuniformity correction in infrared focal-plane arrays. J. Opt. Soc. Am. A 2003, 20, 470–480. [Google Scholar] [CrossRef]
- Hardie, R.C.; Hayat, M.M.; Armstrong, E.; Yasuda, B. Scene-based nonuniformity correction with video sequences and registration. Appl. Opt. 2000, 39, 1241–1250. [Google Scholar] [CrossRef]
- Zuo, C.; Chen, Q.; Gu, G.; Sui, X. Scene-based nonuniformity correction algorithm based on interframe registration. J. Opt. Soc. Am. A 2011, 28, 1164–1176. [Google Scholar] [CrossRef]
- Tendero, Y.; Landeau, S.; Gilles, J. Non-uniformity correction of infrared images by midway equalization. Image Process. Line 2012, 2, 134–146. [Google Scholar] [CrossRef]
- Cao, Y.; Yang, M.Y.; Tisse, C.L. Effective stripe noise removal for low-textured infrared images based on 1-D guided filtering. IEEE Trans. Circuits Syst. Video Technol. 2016, 26, 2176–2188. [Google Scholar] [CrossRef]
- Boutemedjet, A.; Deng, C.; Zhao, B. Edge-aware unidirectional total variation model for stripe non-uniformity correction. Sensors 2018, 18, 1164. [Google Scholar] [CrossRef] [PubMed]
- Tendero, Y.; Gilles, J. ADMIRE: A locally adaptive single-image, non-uniformity correction and denoising algorithm: application to uncooled IR camera. In Infrared Technology and Applications XXXVIII; International Society for Optics and Photonics: Baltimore, MD, USA, 2012; p. 83531. [Google Scholar]
- Sui, X.; Chen, Q.; Gu, G. Adaptive grayscale adjustment-based stripe noise removal method of single image. Infrared Phys. Technol. 2013, 60, 121–128. [Google Scholar] [CrossRef]
- Cao, Y.; Li, Y. Strip non-uniformity correction in uncooled long-wave infrared focal plane array based on noise source characterization. Opt. Commun. 2015, 339, 236–242. [Google Scholar] [CrossRef]
- Cao, Y.; He, Z.; Yang, J.; Cao, Y.; Yang, M.Y. Spatially adaptive column fixed-pattern noise correction in infrared imaging system using 1D horizontal differential statistics. IEEE Photonics J. 2017, 9, 7803513. [Google Scholar] [CrossRef]
- Huang, Y.; He, C.; Fang, H.; Wang, X. Iteratively reweighted unidirectional variational model for stripe non-uniformity correction. Infrared Phys. Technol. 2016, 75, 107–116. [Google Scholar] [CrossRef]
- Kuang, X.; Sui, X.; Chen, Q.; Gu, G. Single Infrared Image Stripe Noise Removal Using Deep Convolutional Networks. IEEE Photonics J. 2017, 9, 1–13. [Google Scholar] [CrossRef]
- He, Z.; Cao, Y.; Dong, Y.; Yang, J.; Cao, Y.; Tisse, C.L. Single-image-based nonuniformity correction of uncooled long-wave infrared detectors: A deep-learning approach. Appl. Opt. 2018, 57, D155–D164. [Google Scholar] [CrossRef]
- Münch, B.; Trtik, P.; Marone, F.; Stampanoni, M. Stripe and ring artifact removal with combined wavelet–Fourier filtering. Opt. Express 2009, 17, 8567–8591. [Google Scholar] [CrossRef]
- Fehrenbach, J.; Weiss, P.; Lorenzo, C. Variational algorithms to remove stationary noise: Applications to microscopy imaging. IEEE Trans. Image Process. 2012, 21, 4420–4430. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.; Yan, L.; Fang, H.; Liu, H. Simultaneous destriping and denoising for remote sensing images with unidirectional total variation and sparse representation. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1051–1055. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Filtering in the Frequency Domain. In Digital Image Processing, 3rd ed.; McDonald, M., Dworkin, A., Disanno, S., Eds.; Prentice Hall: Upper Saddle River, NJ, USA, 2008; pp. 316–320. [Google Scholar]
- Oppenheim, A.V.; Lim, J.S. The importance of phase in signals. Proc. IEEE 1981, 69, 529–541. [Google Scholar] [CrossRef] [Green Version]
- Portmann, J.; Lynen, S.; Chli, M.; Siegwart, R. People detection and tracking from aerial thermal views. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–5 June 2014; pp. 1794–1800. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assesment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Martin, C.S.; Torres, S.N.; Pezoa, J.E. An Effective Reference-Free Performance Metric for Non-uniformity Correction Algorithms in Infrared Imaging System. In Proceedings of the 20th Annual Meeting of the IEEE Lasers and Electro-Optics Society (LEOS), Orlando, FL, USA, 21–24 October 2007; pp. 576–577. [Google Scholar]
- Choi, Y.; Kim, N.; Hwang, S.; Kweon, I.S. Thermal image enhancement using convolutional neural network. In Proceedings of the IEEE/Robotics Society of Japan (RSJ) International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 223–230. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Data | Source | Size | Sensor | Description |
|---|---|---|---|---|
| Simulated images | ||||
| Lena Mandrill | —— | —— | Widely used gray images, added with different levels of stripe noise. | |
| Raw IR images | ||||
| Streat | ASL dataset | Handheld FLIR Tau 320 camera | Outdoor image, rich nature scene, small details and obvious stripe nonuniformity. | |
| Building | Tendero’s dataset | Thales Minie-D camera | Outdoor image, regular lines and edges and obvious stripe nonuniformity. | |
| Kettle | Our dataset | LUSTER TB-M640-CL camera | Indoor image, simple object scene, legible outline, and slight stripe nonuniformity. |
| Lena | Mandrill | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Noisy | WTSF | MIRE | GIF | CNN | Ours | Noisy | WTSF | MIRE | GIF | CNN | Ours | ||
| 0.02 | 33.97 | 31.50 | 24.82 | 33.63 | 36.90 | 37.66 | 34.06 | 35.27 | 32.52 | 36.39 | 35.33 | 38.21 | |
| 0.04 | 28.02 | 31.02 | 24.78 | 32.63 | 31.27 | 33.88 | 28.02 | 34.25 | 32.26 | 34.54 | 30.19 | 35.50 | |
| 0.08 | 22.06 | 29.52 | 24.62 | 29.73 | 23.73 | 30.39 | 22.15 | 32.14 | 31.34 | 30.99 | 23.54 | 33.07 | |
| 0.16 | 15.99 | 26.25 | 23.79 | 24.13 | 16.61 | 27.02 | 15.95 | 27.21 | 28.95 | 24.16 | 16.49 | 29.08 | |
| 0.32 | 10.27 | 21.16 | 21.80 | 15.92 | 10.68 | 22.67 | 10.08 | 21.50 | 24.90 | 15.59 | 10.49 | 25.07 | |
| Lena | Mandrill | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Noisy | WTSF | MIRE | GIF | CNN | Ours | Noisy | WSTF | MIRE | GIF | CNN | Ours | ||
| 0.02 | 0.894 | 0.942 | 0.920 | 0.971 | 0.979 | 0.982 | 0.965 | 0.984 | 0.985 | 0.990 | 0.983 | 0.993 | |
| 0.04 | 0.718 | 0.941 | 0.921 | 0.965 | 0.884 | 0.969 | 0.888 | 0.984 | 0.985 | 0.987 | 0.945 | 0.991 | |
| 0.08 | 0.480 | 0.932 | 0.920 | 0.932 | 0.585 | 0.953 | 0.728 | 0.981 | 0.984 | 0.976 | 0.790 | 0.988 | |
| 0.16 | 0.260 | 0.899 | 0.914 | 0.745 | 0.290 | 0.932 | 0.462 | 0.968 | 0.982 | 0.889 | 0.497 | 0.984 | |
| 0.32 | 0.111 | 0.817 | 0.901 | 0.334 | 0.121 | 0.911 | 0.215 | 0.927 | 0.973 | 0.534 | 0.225 | 0.976 | |
| Street | Building | Kettle | ||||||
|---|---|---|---|---|---|---|---|---|
| AVGE | AVGE | AVGE | ||||||
| Raw | 1.229 | — | 2.042 | — | 2.565 | — | ||
| WTSF | 1.101 | 0.031 | 1.270 | 0.036 | 1.796 | 0.005 | ||
| MIRE | 1.119 | 0.517 | 1.270 | 0.444 | 1.813 | 0.149 | ||
| GIF | 1.111 | 0.033 | 1.257 | 0.043 | 1.796 | 0.005 | ||
| CNN | 1.129 | 0.036 | 1.697 | 0.015 | 1.749 | 0.044 | ||
| Ours | 1.073 | 0.010 | 1.253 | 0.031 | 1.796 | 0.001 | ||
| Image | Resolution | WTSF | MIRE | GIF | CNN | Ours |
|---|---|---|---|---|---|---|
| Lena/Mandrill | 0.022 | 0.227 | 0.052 | 1.784 | 0.017 | |
| Street | 0.039 | 0.306 | 0.074 | 2.125 | 0.021 | |
| Building | 0.042 | 0.427 | 0.082 | 3.059 | 0.024 | |
| Kettle | 0.088 | 1.685 | 0.195 | 14.390 | 0.055 |
| Noisy | WTSF | MIRE | GIF | CNN | ||||
|---|---|---|---|---|---|---|---|---|
| PSNR | 28.05 | 32.30 | 31.49 | 32.66 | 30.67 | 33.21 | 31.57 | |
| SSIM | 0.636 | 0.953 | 0.955 | 0.964 | 0.812 | 0.965 | 0.952 | |
| PSNR | 9.961 | 25.63 | 23.04 | 17.91 | 11.31 | 18.87 | 26.26 | |
| SSIM | 0.036 | 0.761 | 0.613 | 0.357 | 0.061 | 0.343 | 0.789 |
| Noisy | Corrected | |
|---|---|---|
| PSNR | 29.82 | 33.66 |
| SSIM | 0.879 | 0.947 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, Q.; Qin, H.; Yan, X.; Yang, S.; Yang, T. Single Infrared Image-Based Stripe Nonuniformity Correction via a Two-Stage Filtering Method. Sensors 2018, 18, 4299. https://doi.org/10.3390/s18124299
Zeng Q, Qin H, Yan X, Yang S, Yang T. Single Infrared Image-Based Stripe Nonuniformity Correction via a Two-Stage Filtering Method. Sensors. 2018; 18(12):4299. https://doi.org/10.3390/s18124299
Chicago/Turabian StyleZeng, Qingjie, Hanlin Qin, Xiang Yan, Shuowen Yang, and Tingwu Yang. 2018. "Single Infrared Image-Based Stripe Nonuniformity Correction via a Two-Stage Filtering Method" Sensors 18, no. 12: 4299. https://doi.org/10.3390/s18124299
APA StyleZeng, Q., Qin, H., Yan, X., Yang, S., & Yang, T. (2018). Single Infrared Image-Based Stripe Nonuniformity Correction via a Two-Stage Filtering Method. Sensors, 18(12), 4299. https://doi.org/10.3390/s18124299