Next, the proposed method is simulated and compared with existing methods. The environmental setup and simulation parameters are defined in the first subsection, and the numerical results are given in the second. The evaluation metric includes the impacts of the number of sensor nodes and the radio range on positioning accuracy. The computation time of the proposed method is also evaluated. By considering a practical case, the impact signal irregularity on the positioning accuracy is also discussed. All simulation results are the average over 2000 random deployment results.
4.2. Numerical Results
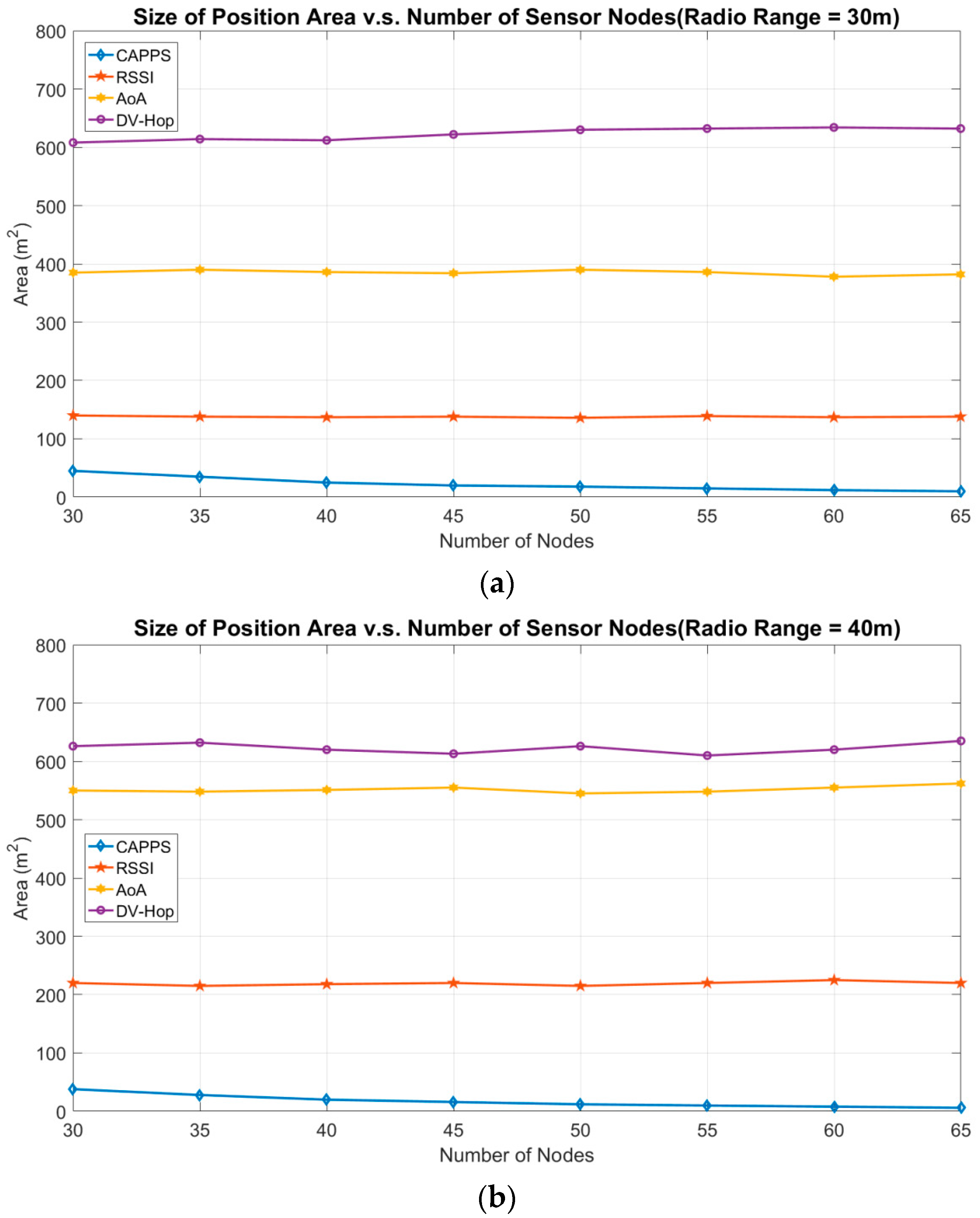
Figure 4 depicts the positioning area sizes for RSSI, AoA, DV-Hop, and CAPPS with different numbers of sensor nodes. In
Figure 4a, the radio range of each sensor node is set to 30 m. To display the results clearly, the numerical results depicted in
Figure 4a are listed in
Table 2. When the number of sensor nodes increases, the size of the positioning area for DV-Hop fluctuates between 608 m
2 and 636 m
2. Increasing the number of sensor nodes does not explicitly influence the numbers of propagation hops from the target to the anchor points. This is because the sensor nodes are uniformly deployed, and the density of sensor nodes is high enough to cover the entire RoI. The AoA and RSSI methods require a constant number of anchor points to position the target. Thus, increasing the number of sensor nodes does not introduce explicit variation in the positioning area. The size of the positioning area fluctuates within 378–390 m
2 and 136–140 m
2 respectively for the two methods.
For CAPPS, sensor nodes with a higher deployment density can provide more chances to prune the positioning area. Thus, when the number of sensor nodes is 65, the size of the positioning area is 10 m2. Compared with the case with 30 sensor nodes, where the size of the positioning area is 47 m2, the improvement is approximately 79%. In the case with 65 sensor nodes, the positioning area of CAPPS is smaller than those of RSSI, AoA, and DV-Hop by approximately 93%, 97%, and 98%, respectively.
In
Figure 4b, when the radio range of the sensor node increases to 40 m, the number of propagation hops from the target to each anchor point in the DV-Hop method decreases. Therefore, reducing the number of propagation hops can reduce the distance error for one hop, so that the size of the positioning area decreases. For the AoA method, the positioning area explicitly increases as the number of sensor nodes increases. We know that the positioning area in the AoA method is determined by two fan sectors obtained from two different sensor nodes. Therefore, the area of a sector increases exponentially when the radio range increases. The size of the positioning area with a radio range of 40 m is considerably larger than that for 30 m. The RSSI method exhibits a similar trend to the AoA method. Increasing the radio range will contribute to a larger distance estimation error, thereby increasing the positioning area. In the CAPPS method, increasing the radio range can extend the coverage area of each sensor node. Thus, each sensor node has a better opportunity to prune the positioning area; therefore, the size of the positioning area is reduced. As shown in
Figure 4a,b, the size of the positioning area is between 47 m
2 and 10 m
2 with the radio range set to 30 m and is between 38 m
2 and 6 m
2 for a radio range of 40 m.
Figure 5 illustrates the influence of the radio range on the size of the positioning area. To guarantee that the entire RoI can be covered by the sensor nodes, the number of sensor nodes in this experiment is set to 100. The size of the positioning area for DV-Hop decreases as the radio range increases. Then, the positioning area size fluctuates between 652 m
2 and 725 m
2. When a short radio range is employed, the average number of propagation hops computed in DV-Hop increases. More propagation hops imply more chances to introduce distance errors, because each hop may contribute to some distance error. Therefore, the size of the positioning area increases when a shorter radio range is employed. Conversely, when the radio range increases, the number of propagation hops decreases, and thereby the size of the positioning area decreases.
For the AoA method, the area of a sector increases exponentially as the radio range increases. Therefore, the size of the positioning area increases when the radio range increases. For the RSSI method, a larger distance estimation error is introduced as the radio range increases and in turn the size of the positioning area increases. This is similar to the results shown in
Figure 4, where the positioning area size increases along with the radio range.
For CAPPS, deploying more sensor nodes can counteract the drawback of a short radio range. When the radio range is 16 m, the positioning area is approximately 18 m
2. For a range of 30 m, the area is approximately 2 m
2. These results are superior to those for ranges of 10 m
2 and 6 m
2 with 65 sensor nodes, as shown in
Figure 4a,b, respectively. Therefore, increasing radio range can reduce the size of positioning area. This implies that the positioning accuracy can be enhanced when the radio range of the sensor nodes is increased.
Figure 6 compares the computation times for each method. The radio range in this experiment is 30 m, and the number of deployed sensor nodes ranges from 50 to 250. The platform to perform these methods is equipped with an Intel I7-6700 CPU (3.4 GHz), and the memory is DDR4 2133 8 GB RAM. The graphics card is NVIDIA GeForce GT 430. The simulation results are averaged over 100 different deployment topologies. In this figure, the execution times of the AoA and RSSI methods do not increase when the number of sensor nodes increases. This is because the number of sensor nodes used in computing the positioning area in both methods is constant. The execution times of both DV-Hop and CAPPS increase as the number of sensor nodes increases.
In the DV-Hop method, each sensor node must compute its own average propagation hops to the anchor points. This requires less computation time when the network has fewer sensor nodes. When the number of sensor nodes increases, the computation time increases exponentially. In the CAPPS method, the computation overhead can be considerably reduced by first computing the one-hop neighbors of the sensor nodes in Ωc. When the number of nodes is greater than 200, the computation time of CAPPS becomes lower than that of DV-Hop.
In
Figure 7a, the original CEPS method, C-CEPS, CAPPS*, and CAPPS are compared. The radio range of the sensor nodes in this figure is set to 30 m. The CAPPS* is the same as the CAPPS but using all one-hop neighboring target-undetected sensor nodes of the nodes in set
Ωc to prune the positioning area. In our simulation, the size of the positioning area is computed by counting the pixels, which are included in the positioning area. The CAPPS method requires double the computation time of that of C-CEPS, because CAPPS must compute the pruning area for the sensor nodes that cannot detect the target. The computation time of CAPPS is lower than that of the original CEPS method, because many redundant sensor nodes are discarded in the positioning procedure. Without filtering the one-hop neighbors of the nodes in set
Ωc, the CAPPS* spends more times on counting the number of pixels in the coverage area of each sensor node. Therefore, the computation time of CAPPS* is worse than that of the CAPPS. In addition, as the number of deployed sensor nodes grows, the computation overhead increases quickly. In the case of 250 deployed sensor nodes, the computation time is about 1.7 times higher than that of the CAPPS.
Figure 7b,c is the impacts of deployment density and radio range on the size of the positioning area. In
Figure 7b, the radio range is set to 20 m, and the number of sensor nodes in
Figure 7c is set to 50. For all methods, more sensor nodes can be involved in locating the target when the density of the deployed sensor nodes increases. Therefore, the size of the positioning area decreases when the number of sensor nodes increases. Both the CEPS and C-CEPS methods yield the same size for the positioning area, because C-CEPS only reduces the computation time by removing redundant sensor nodes. The CAPPS method yields a significant reduction in the size of the positioning area. The improvement ratio is approximately between 56% and 76%. This proves that by applying the sensor nodes that cannot detect the target to prune the positioning area, CAPPS can efficiently enhance the positioning accuracy. The CAPPS* and CAPPS yield the same size for the positioning area. CAPPS reduces the computation time by removing redundant one-hop neighboring sensor nodes.
Next, the signal irregularity is considered, and the number of false positioning results is evaluated. False positioning means that the target is not enclosed within the positioning area. In this experiment, the ratio of the signal irregularity to radio range is used to simplify complexity channel interferences caused by the environmental factors. The worst case of signal irregularity is considered to be the comparison.
Figure 8 shows the number of false positioning results for 1000 different topologies. The experimental results without the CP mechanism are depicted in
Figure 8a, and the results with the CP mechanism are shown in
Figure 8b. The radio range in this experiment is 20 m. The degree of signal irregularity (DoI) rates being evaluated, denoted by
p, are {0.2, 0.15, 0.1, 0.05}. Here,
p for the DoI indicates that the sensor node has a 50% probability of failing to detect the target when the target is in its
uReg. The presence of the target in the
uReg of a sensor node means that the distance from target to the sensor node is between
R × (1 −
p) and
R. For example, DoI = 0.05 indicates that the target is within the
uReg of the sensor node, and its distance to the sensor node is between 19 m and 20 m.
The number of false positioning results occurs as the number of sensor nodes increases. Sensors within the
uReg may contribute a fault detecting information to the sink. Thus, when more sensor nodes are deployed, the probability that sensor nodes appear within the
uReg increases. This causes the number of false positioning grows.
Figure 8a shows the results without applying the CP mechanism. The number of false positioning results is more than 300, even in the case with 30 sensor nodes and a low degree
p = 0.05. When 65 sensor nodes are deployed, the number of false positioning results is around 750, which comprises approximately three-quarters of all simulation topologies. When a high degree
p = 0.2 is employed, 450 and 920 false positioning results were obtained in the cases with 30 and 65 sensor nodes, respectively.
By applying the CP mechanism, the number of false positioning results can be significantly reduced, and is no more than 120 in the case with 30 sensor nodes for any degree
p. Furthermore, the number of false positioning results was less than 270 in the case with 65 sensor nodes. This result represents around a quarter of that without applying the CP mechanism. This proves that the CP mechanism is effective in reducing the number of false positioning results in a real scenario. The values of the corresponding confidence interval of
Figure 8a,b are given in
Table 3 and
Table 4. The confidence interval in the case of
p = 0.2 is larger than the case of
p = 0.05. The scenario with higher DoI generates more oscillation in the results because more sensor nodes may provide false information on positioning.
Finally, different size of ε is applied to evaluate the convergence rate of the frequency of the false positioning shown as
Figure 8c. Increasing the size of ε can reduce the frequency of false positioning. When the 1.5ε is applied, the number of false positioning is fewer than 80 that is smaller than 10% of the total 1000 simulation times. As the 1.75ε is applied, the ratio of false positioning is less than 3% of the total simulation times. Increasing the size of ε indicates more sensor nodes near the uncertainty region will be removed. The sensor nodes that may provide false information of the target can be expelled so that the frequency of false positioning can be reduced. On the contrary, the target-undetected sensor nodes that can be used to prune the positioning area are also removed. Thus, the positioning accuracy will be sacrificed.
We also evaluated the impact of the radio range, shown in
Figure 9. The number of deployed sensor nodes is 50, and the radio range varies between 16 m and 30 m. A short radio range can reduce the probability of false positioning, because the introduced
uReg is small. In the case when the radio range is 16 m, the number of false positioning results is approximately 400–500 without the CP mechanism. However, the number of false positioning results is greater than 800 when the radio range is above 25 m. In the case of a high degree
p = 0.2, the number of false positioning results is more than 98%, as shown in
Figure 9a. By applying the CP mechanism, the number of false positioning results with a radio range of 16 m becomes smaller than 125. The worst number of false positioning results in the radio range of 30 m is no more than 340, as shown in
Figure 9b. The values of the corresponding confidence interval of
Figure 9a,b are given in
Table 5 and
Table 6. Like in
Figure 8, the confidence interval in the case of higher DoI generates more oscillation.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}