Multi-Feature Classification of Multi-Sensor Satellite Imagery Based on Dual-Polarimetric Sentinel-1A, Landsat-8 OLI, and Hyperion Images for Urban Land-Cover Classification


Abstract
:1. Introduction
2. Study Area and Datasets
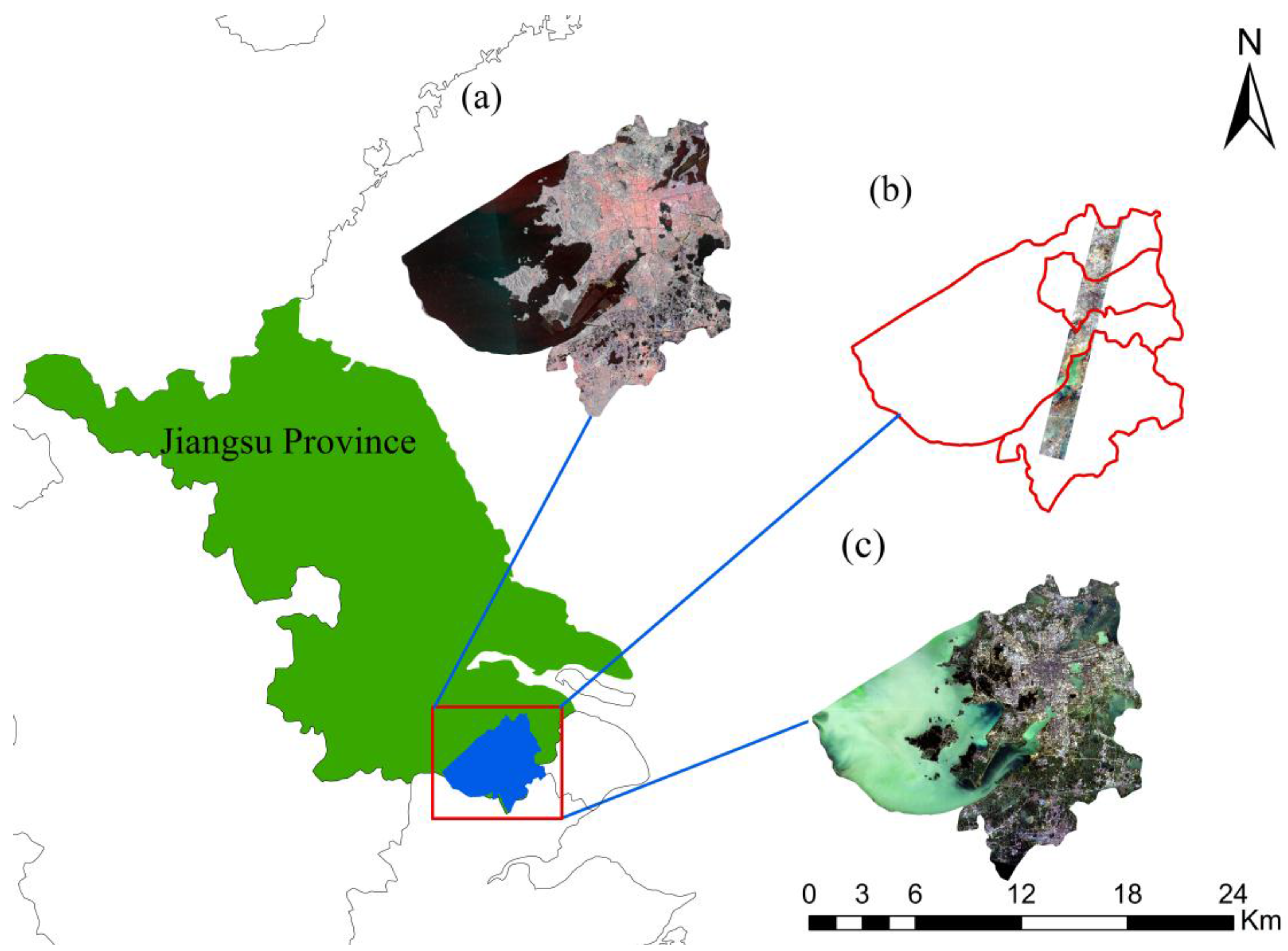
2.1. Study Area
2.2. SAR Satellite Data
2.3. Optical Satellite Data
2.4. Accuracy Assessment
3. Methods
3.1. Satellite Data Pre-Processing
3.2. Feature Sets
3.2.1. Color Features
3.2.2. Texture Features
3.2.3. Coherence Features
3.2.4. Feature Combination
3.3. Classifiers
4. Results and Discussion
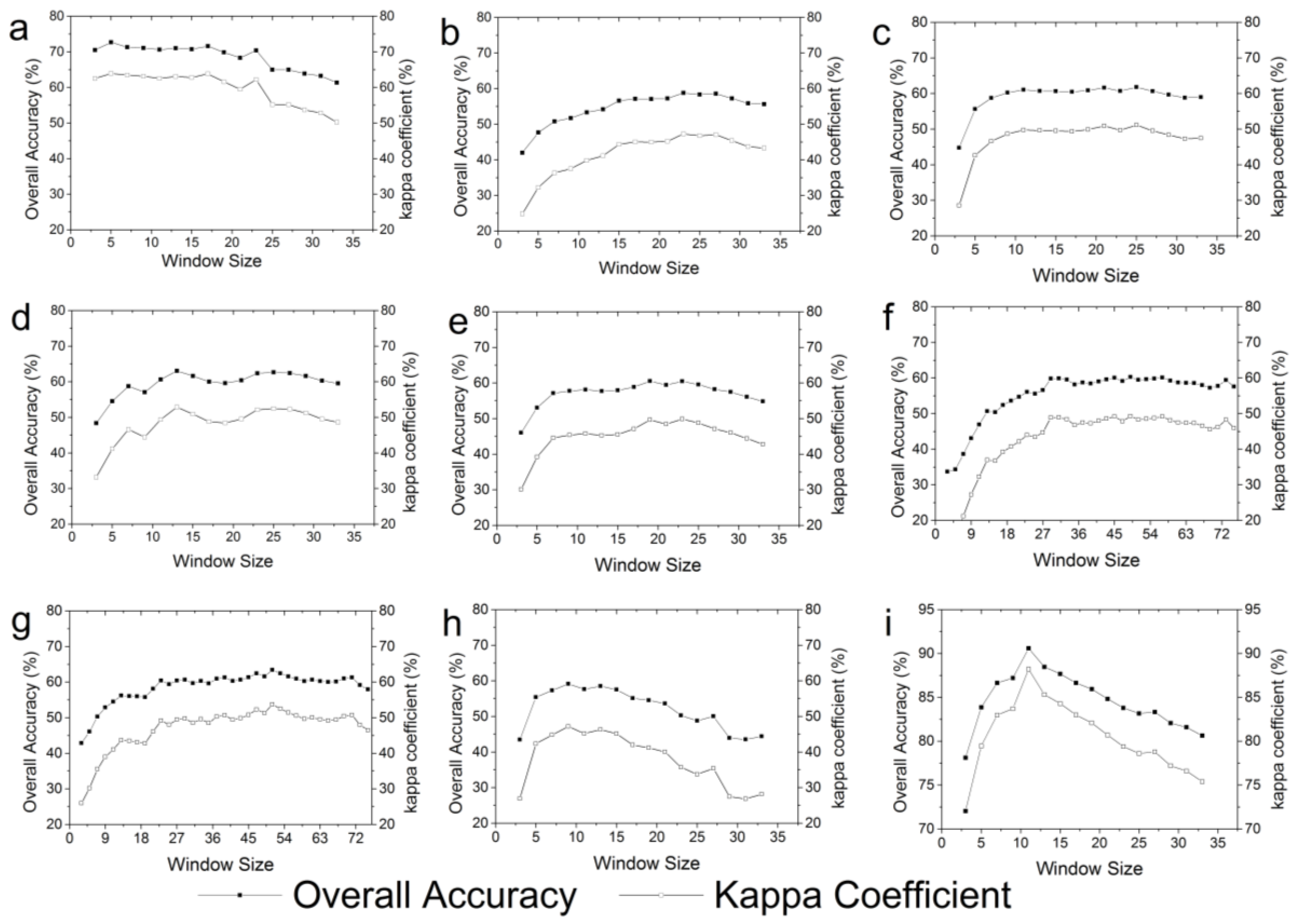
4.1. Texture Analysis of Sentinel-1A Image
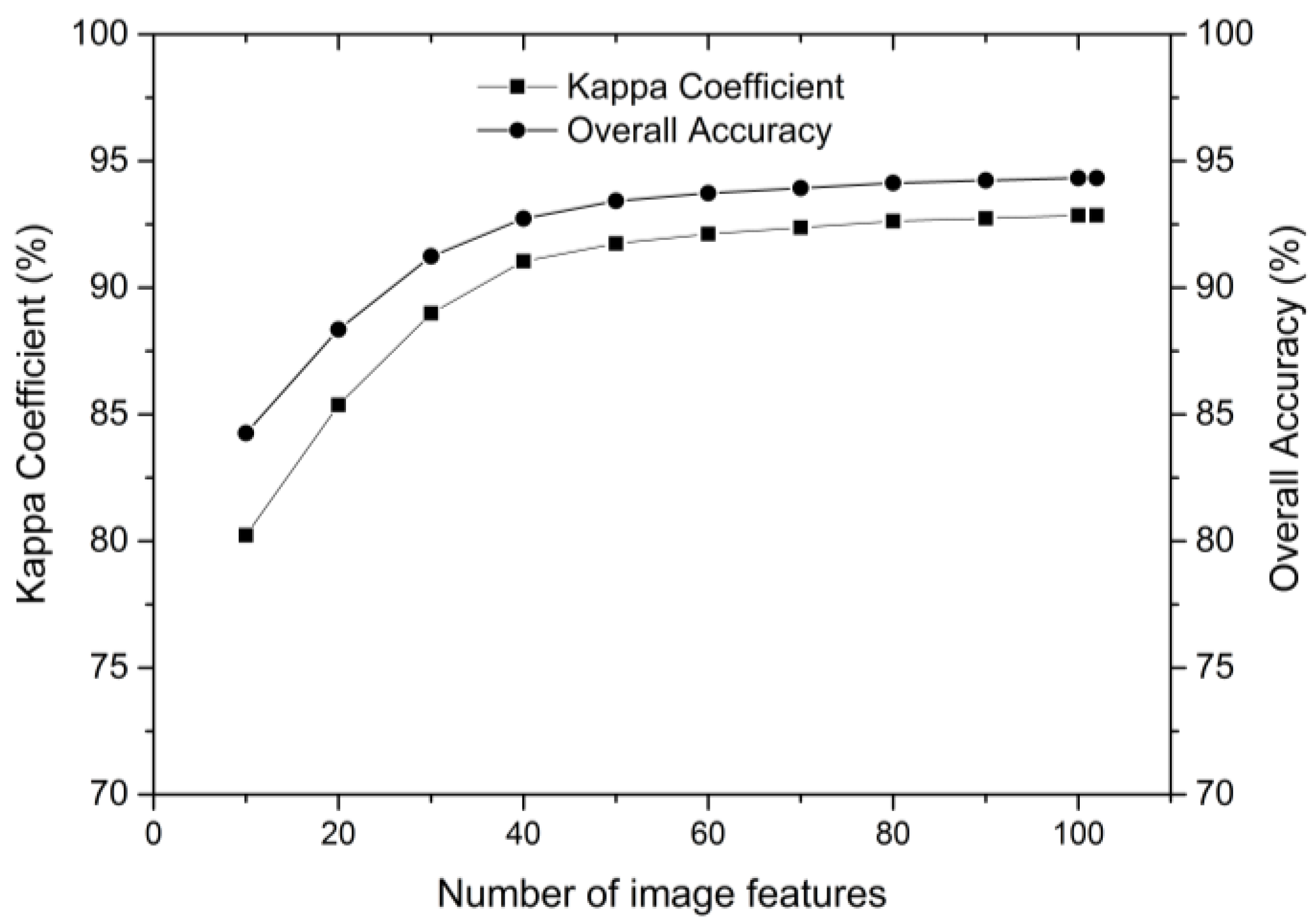
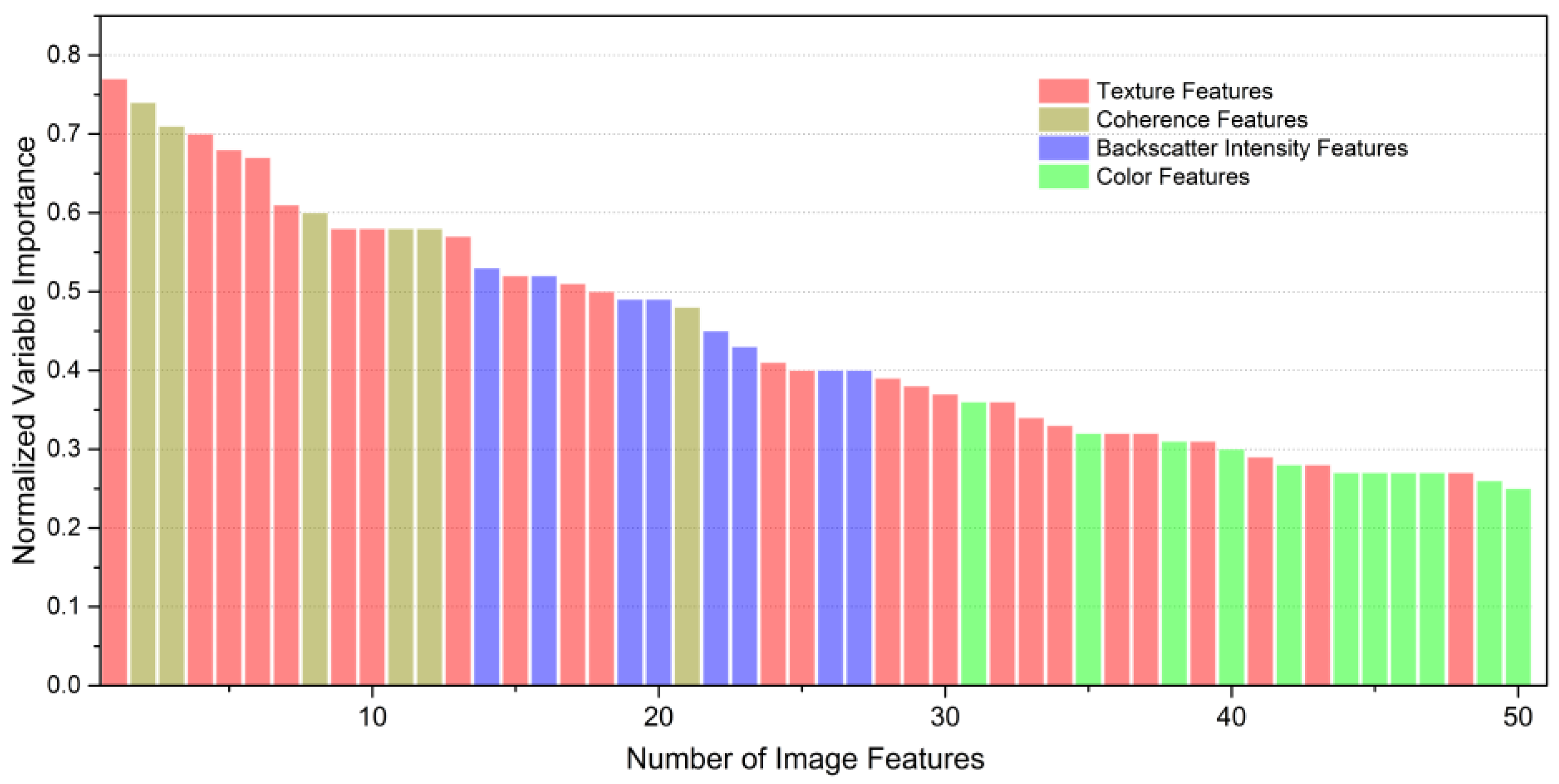
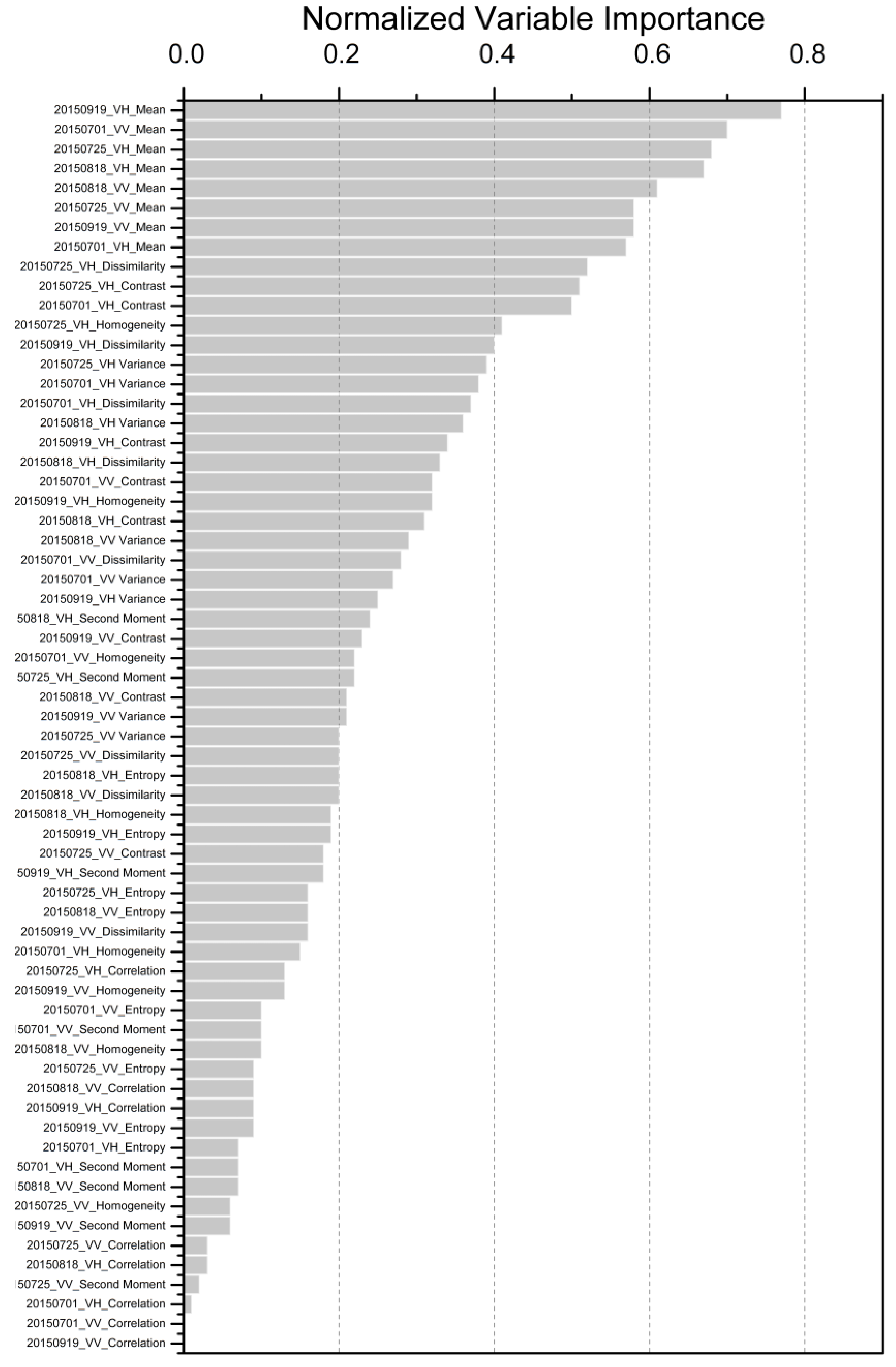
4.2. Feature Selection
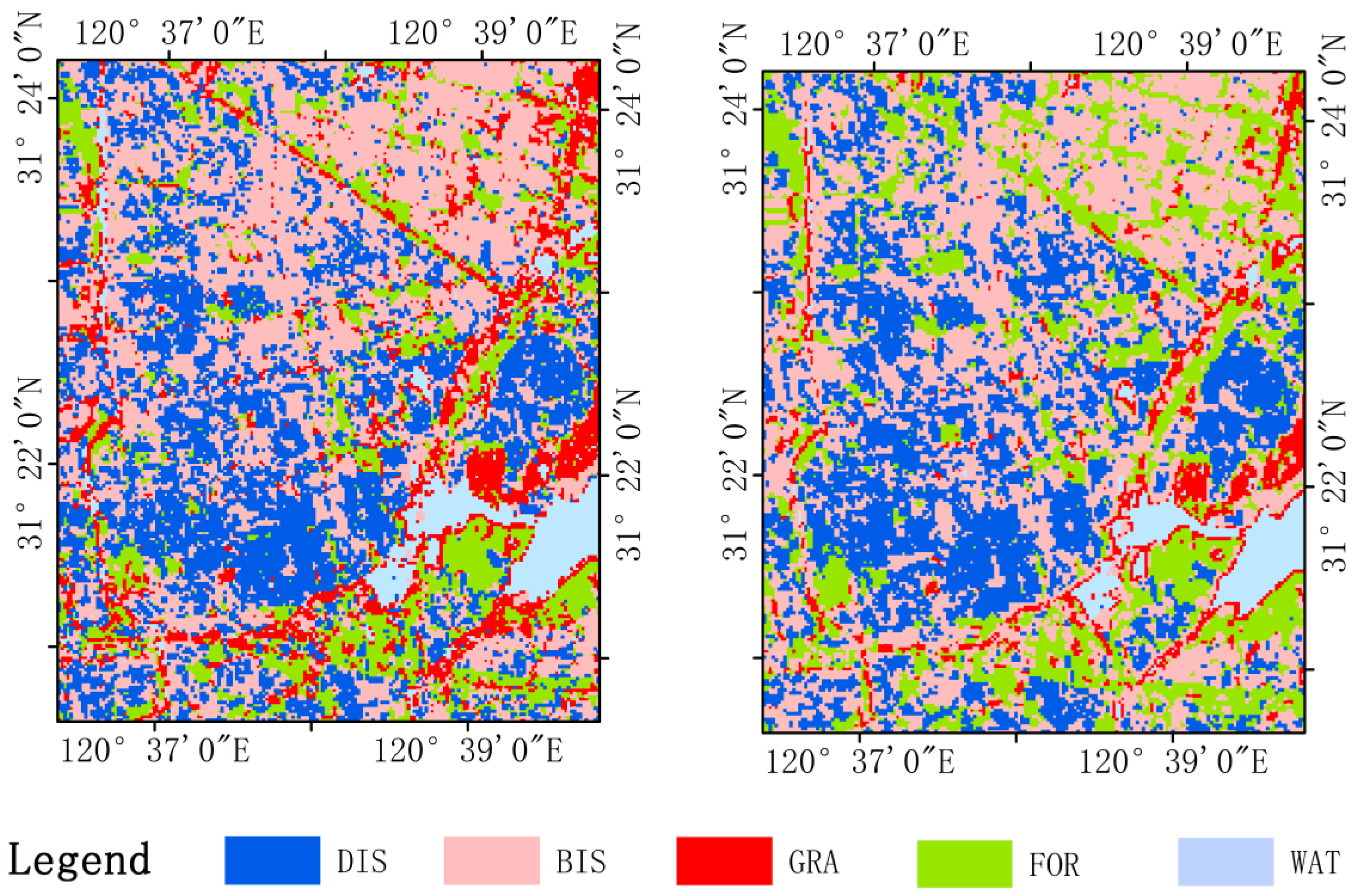
4.3. Urban Land-Cover Mapping
4.3.1. Contribution of Different Feature Combinations
4.3.2. Multi-Sensor Urban Land Cover Mapping
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- World Health Organization. Centre for Health Development. Hidden Cities: Unmasking and Overcoming Health Inequities in Urban Settings; World Health Organization: Geneva, Switzerland, 2010. [Google Scholar]
- Jacobson, M.Z.; Ten Hoeve, J.E. Effects of urban surfaces and white roofs on global and regional climate. J. Clim. 2012, 25, 1028–1044. [Google Scholar] [CrossRef]
- Shi, L.F.; Ling, F.; Ge, Y.; Foody, G.M.; Li, X.D.; Wang, L.H.; Zhang, Y.H.; Du, Y. Impervious surface change mapping with an uncertainty-based spatial-temporal consistency model: A case study in wuhan city using landsat time-series datasets from 1987 to 2016. Remote Sens. 2017, 9, 1148. [Google Scholar] [CrossRef]
- Sharma, R.C.; Tateishi, R.; Hara, K.; Gharechelou, S.; Iizuka, K. Global mapping of urban built-up areas of year 2014 by combining modis multispectral data with viirs nighttime light data. Int. J. Digit. Earth 2016, 9, 1004–1020. [Google Scholar] [CrossRef]
- Angiuli, E.; Trianni, G. Urban mapping in landsat images based on normalized difference spectral vector. IEEE Geosci. Remote Sens. Lett. 2014, 11, 661–665. [Google Scholar] [CrossRef]
- Ribeiro, B.M.G.; Fonseca, L.M.G. Urban Land Cover Classification Using Worldview-2 Images and c4.5 Algorithm; IEEE: New York, NY, USA, 2013; pp. 250–253. [Google Scholar]
- Niu, X.; Ban, Y.F. Multi-temporal RADARSAT-2 polarimetric SAR data for urban land-cover classification using an object-based support vector machine and a rule-based approach. Int. J. Remote Sens. 2013, 34, 1–26. [Google Scholar] [CrossRef]
- Li, X.; Yeh, A.G. Multitemporal SAR images for monitoring cultivation systems using case-based reasoning. Remote Sens. Environ. 2004, 90, 524–534. [Google Scholar] [CrossRef]
- LeeJs, P. Polarimetricradarimaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Ulaby, F.T.; Kouyate, F.; Brisco, B.; Williams, T.H.L. Textural information in SAR images. IEEE Trans. Geosci. Remote 1986, 24, 235–245. [Google Scholar] [CrossRef]
- Aschbacher, J.; Pongsrihadulchai, A.; Karnchanasutham, S.; Rodprom, C.; Paudyal, D.R.; Toan, T.L. Assessment of ers-1 SAR data for rice crop mapping and monitoring. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS ‘95. ‘Quantitative Remote Sensing for Science and Applications’, Firenze, Italy, 10–14 July 1995; Volume 2183, pp. 2183–2185. [Google Scholar]
- Park, N.W.; Chi, K.H. Integration of multitemporal/polarization c-band SAR data sets for land-cover classification. Int. J. Remote Sens. 2008, 29, 4667–4688. [Google Scholar] [CrossRef]
- Dell’Acqua, F.; Gamba, P.; Lisini, G. Improvements to urban area characterization using multitemporal and multiangle SAR images. IEEE Trans. Geosci. Remote 2003, 41, 1996–2004. [Google Scholar] [CrossRef]
- Ban, Y.F.; Hu, H.T.; Rangel, I. Fusion of radarsat fine-beam SAR and quickbird data for land-cover mapping and change detection. In Geoinformatics 2007: Remotely Sensed Data and Information, pts 1 and 2; Ju, W., Zhao, S., Eds.; SPIE Optical Engineering: Bellingham, DC, USA, 2007; Volume 6752. [Google Scholar]
- Waske, B.; van der Linden, S. Classifying multilevel imagery from SAR and optical sensors by decision fusion. IEEE Trans. Geosci. Remote 2008, 46, 1457–1466. [Google Scholar] [CrossRef]
- Mazher, A.; Li, P.J. A decision fusion method for land cover classification using multi-sensor data. In Proceedings of the 4th International Workshop on Earth Observation and Remote Sensing Applications, Guangzhou, China, 4–6 July 2016; Weng, Q., Gamba, P., Xian, G., Chen, J.M., Liang, S., Eds.; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Bigdeli, B.; Pahlavani, P. High resolution multisensor fusion of sar, optical and lidar data based on crisp vs. Fuzzy and feature vs. Decision ensemble systems. Int. J. Appl. Earth Obs. Geoinfor. 2016, 52, 126–136. [Google Scholar] [CrossRef]
- Xiang, D.L.; Wang, W.; Tang, T.; Su, Y. Multiple-component polarimetric decomposition with new volume scattering models for polsar urban areas. IET Radar Sonar Navig. 2017, 11, 410–419. [Google Scholar] [CrossRef]
- Hariharan, S.; Tirodkar, S.; Bhattacharya, A. Polarimetric SAR decomposition parameter subset selection and their optimal dynamic range evaluation for urban area classification using random forest. Int. J. Appl. Earth Obs. Geoinfor. 2016, 44, 144–158. [Google Scholar] [CrossRef]
- Deng, L.; Yan, Y.N.; Sun, C. Use of sub-aperture decomposition for supervised polsar classification in urban area. Remote Sens. 2015, 7, 1380–1396. [Google Scholar] [CrossRef]
- Salehi, M.; Sahebi, M.R.; Maghsoudi, Y. Improving the accuracy of urban land cover classification using RADARSAT-2 polsar data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1394–1401. [Google Scholar]
- Gao, L.A.; Ban, Y.F. Multitemporal RADARSAT-2 polarimetric SAR data for urban land-cover mapping. In Proceedings of the Sixth International Symposium on Digital Earth, Beijing, China, 9–12 September 2009; Guo, H., Wang, C., Eds.; SPIE Optical Engineering: Bellingham, DC, USA, 2010; Volume 7841. [Google Scholar]
- Balzter, H.; Cole, B.; Thiel, C.; Schmullius, C. Mapping corine land cover from sentinel-1a SAR and srtm digital elevation model data using random forests. Remote Sens. 2015, 7, 14876–14898. [Google Scholar] [CrossRef]
- McNairn, H.; Kross, A.; Lapen, D.; Caves, R.; Shang, J. Early season monitoring of corn and soybeans with terraSAR-X and radarsat-2. Int. J. Appl. Earth Obs. Geoinfor. 2014, 28, 252–259. [Google Scholar] [CrossRef]
- McNairn, H.; Champagne, C.; Shang, J.; Holmstrom, D.; Reichert, G. Integration of optical and synthetic aperture radar (SAR) imagery for delivering operational annual crop inventories. ISPRS J. Photogr. Remote Sens. 2009, 64, 434–449. [Google Scholar] [CrossRef]
- Zhou, T.; Pan, J.; Zhang, P.; Wei, S.; Han, T. Mapping winter wheat with multi-temporal SAR and optical images in an urban agricultural region. Sensors 2017, 17, 1210. [Google Scholar] [CrossRef] [PubMed]
- Deng, C.; Li, C.; Zhu, Z.; Lin, W.; Xi, L. Subpixel urban impervious surface mapping: The impact of input landsat images. ISPRS J. Photogr. Remote Sens. 2017, 133, 89–103. [Google Scholar] [CrossRef]
- Xu, R.; Zhang, H.S.; Lin, H. Urban impervious surfaces estimation from optical and SAR imagery: A comprehensive comparison. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4010–4021. [Google Scholar] [CrossRef]
- Werner, A.; Storie, C.D.; Storie, J. Evaluating sar-optical image fusions for urban lulc classification in vancouver Canada. Can. J. Remote Sens. 2014, 40, 278–290. [Google Scholar] [CrossRef]
- Shao, Z.; Fu, H.; Fu, P.; Yin, L. Mapping urban impervious surface by fusing optical and SAR data at the decision level. Remote Sens. 2016, 8, 945. [Google Scholar] [CrossRef]
- Jiang, L.M.; Liao, M.S.; Lin, H.; Yang, L.M. Synergistic use of optical and inSAR data for urban impervious surface mapping: A case study in Hong Kong. Int. J. Remote Sens. 2009, 30, 2781–2796. [Google Scholar] [CrossRef]
- Leinenkugel, P.; Esch, T.; Kuenzer, C. Settlement detection and impervious surface estimation in the mekong delta using optical and SAR remote sensing data. Remote Sens. Environ. 2011, 115, 3007–3019. [Google Scholar] [CrossRef]
- Zhou, Y.; Lin, C.X.; Wang, S.X.; Liu, W.L.; Tian, Y. Estimation of building density with the integrated use of GF-1 PMS and Radarsat-2 data. Remote Sens. 2016, 8, 23. [Google Scholar] [CrossRef]
- Yang, L.M.; Jiang, L.M.; Lin, H.; Liao, M.S. Quantifying sub-pixel urban impervious surface through fusion of optical and insar imagery. Gisci. Remote Sens. 2009, 46, 161–171. [Google Scholar] [CrossRef]
- Kumar, V.; Agrawal, P.; Agrawal, S. Alos palsar and hyperion data fusion for land use land cover feature extraction. J. Indian Soc. Remote 2017, 45, 407–416. [Google Scholar] [CrossRef]
- Borghys, D.; Shimoni, M.; Degueldre, G.; Perneel, C. Improved object recognition by fusion of hyperspectral and SAR Data. Proceedings 5th EARSeL Workshop on Imaging Spectroscopy, Bruges, Belgium, 23–25 April 2007. [Google Scholar]
- Shokrollahi, M.; Ebadi, H. Improving the accuracy of land cover classification using fusion of polarimetric SAR and hyperspectral images. J. Indian Soc. Remote 2016, 44, 1017–1024. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Van Beijma, S.; Comber, A.; Lamb, A. Random forest classification of salt marsh vegetation habitats using quad-polarimetric airborne SAR, elevation and optical RS data. Remote Sens. Environ. 2014, 149, 118–129. [Google Scholar] [CrossRef]
- Furtado, L.F.D.; Silva, T.S.F.; Novo, E. Dual-season and full-polarimetric c band SAR assessment for vegetation mapping in the amazon várzea wetlands. Remote Sens. Environ. 2016, 174, 212–222. [Google Scholar] [CrossRef]
- Corcoran, J.M.; Knight, J.F.; Gallant, A.L. Influence of multi-source and multi-temporal remotely sensed and ancillary data on the accuracy of random forest classification of wetlands in Northern Minnesota. Remote Sens. 2013, 5, 3212–3238. [Google Scholar] [CrossRef]
- Mandianpari, M.; Salehi, B.; Mohammadimanesh, F.; Motagh, M. Random forest wetland classification using alos-2 l-band, RADARSAT-2 c-band, and terraSAR-X imagery. ISPRS J. Photogr. Remote Sens. 2017, 130, 13–31. [Google Scholar] [CrossRef]
- Skakun, S.; Kussul, N.; Shelestov, A.Y.; Lavreniuk, M.; Kussul, O. Efficiency assessment of multitemporal c-band RADARSAT-2 intensity and landsat-8 surface reflectance satellite imagery for crop classification in Ukraine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3712–3719. [Google Scholar] [CrossRef]
- Shu, Y.M.; Li, J.; Gomes, G. Shoreline extraction from RADARSAT-2 intensity imagery using a narrow band level set segmentation approach. Mar. Geod. 2010, 33, 187–203. [Google Scholar] [CrossRef]
- Li, Y.; Li, J. Oil spill detection from SAR intensity imagery using a marked point process. Remote Sens. Environ. 2010, 114, 1590–1601. [Google Scholar] [CrossRef]
- Mishra, V.N.; Prasad, R.; Kumar, P.; Gupta, D.K.; Srivastava, P.K. Dual-polarimetric c-band SAR data for land use/land cover classification by incorporating textural information. Environ. Earth Sci. 2016, 76, 26. [Google Scholar] [CrossRef]
- Zhang, H.; Lin, H.; Li, Y.; Zhang, Y.; Fang, C. Mapping urban impervious surface with dual-polarimetric SAR data: An improved method. Landsc. Urban Plan. 2016, 151, 55–63. [Google Scholar] [CrossRef]
- Uhlmann, S.; Kiranyaz, S. Classification of dual- and single polarized SAR images by incorporating visual features. ISPRS J. Photogr. Remote Sens. 2014, 90, 10–22. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Boni, G. Use of SAR data for detecting floodwater in urban and agricultural areas: The role of the interferometric coherence. IEEE Trans. Geosci. Remote 2016, 54, 1532–1544. [Google Scholar] [CrossRef]
- Xiang, D.L.; Tang, T.; Hu, C.B.; Fan, Q.H.; Su, Y. Built-up area extraction from polsar imagery with model-based decomposition and polarimetric coherence. Remote Sens. 2016, 8, 685. [Google Scholar] [CrossRef]
- Zhang, X.M.; He, G.J.; Zhang, Z.M.; Peng, Y.; Long, T.F. Spectral-spatial multi-feature classification of remote sensing big data based on a random forest classifier for land cover mapping. Clust. Comput. 2017, 20, 2311–2321. [Google Scholar] [CrossRef]
- Inglada, J.; Vincent, A.; Arias, M.; Marais-Sicre, C. Improved early crop type identification by joint use of high temporal resolution SAR and optical image time series. Remote Sens. 2016, 8, 362. [Google Scholar] [CrossRef]
- Wurm, M.; Taubenbock, H.; Weigand, M.; Schmitt, A. Slum mapping in polarimetric SAR data using spatial features. Remote Sens. Environ. 2017, 194, 190–204. [Google Scholar] [CrossRef]
- Schlund, M.; von Poncet, F.; Hoekman, D.H.; Kuntz, S.; Schmullius, C. Importance of bistatic SAR features from tandem-x for forest mapping and monitoring. Remote Sens. Environ. 2014, 151, 16–26. [Google Scholar] [CrossRef]
- Navarro, A.; Rolim, J.; Miguel, I.; Catalão, J.; Silva, J.; Painho, M.; Vekerdy, Z. Crop monitoring based on spot-5 take-5 and sentinel-1a data for the estimation of crop water requirements. Remote Sens. 2016, 8, 525. [Google Scholar] [CrossRef]
- Zhou, L.; Guo, J.; Hu, J.; Li, J.; Xu, Y.; Pan, Y.; Shi, M. Wuhan surface subsidence analysis in 2015–2016 based on sentinel-1a data by SBAS-inSAR. Remote Sens. 2017, 9, 982. [Google Scholar] [CrossRef]
- Zhou, C.; Zheng, L. Mapping radar glacier zones and dry snow line in the antarctic peninsula using sentinel-1 images. Remote Sens. 2017, 9, 1171. [Google Scholar] [CrossRef]
- Ko, B.; Kim, H.; Nam, J. Classification of potential water bodies using landsat 8 oli and a combination of two boosted random forest classifiers. Sensors 2015, 15, 13763. [Google Scholar] [CrossRef] [PubMed]
- Nagne, A.D.; Dhumal, R.K.; Vibhute, A.D.; Rajendra, Y.D.; Gaikwad, S.; Kale, K.V.; Mehrotra, S.C. Performance evaluation of urban areas land use classification from hyperspectral data by using mahalanobis classifier. In Proceedings of the 2017 11th International Conference on Intelligent Systems and Control (Isco 2017), Coimbatore, India, 5–6 January 2017; pp. 388–392. [Google Scholar]
- Deak, M.; Telbisz, T.; Arvai, M.; Mari, L.; Horvath, F.; Kohan, B.; Szabo, O.; Kovacs, J. Heterogeneous forest classification by creating mixed vegetation classes using eo-1 hyperion. Int. J. Remote Sens. 2017, 38, 5215–5231. [Google Scholar]
- Puletti, N.; Camarretta, N.; Corona, P. Evaluating eo1-hyperion capability for mapping conifer and broadleaved forests. Eur. J. Remote Sens. 2016, 49, 157–169. [Google Scholar] [CrossRef]
- Kar, S.; Rathore, V.S.; Champati ray, P.K.; Sharma, R.; Swain, S.K. Classification of river water pollution using hyperion data. J. Hydrol. 2016, 537, 221–233. [Google Scholar] [CrossRef]
- Chen, C.; Sui, X.X.; Zhen, G.W.; Guo, B.Y.; Chen, X.W. Extraction of cross-sea bridges from gf-2 pms satellite images using mathematical morphology. In Proceedings of the 6th digital earth summit, Beijing, China, 7–8 July 2016; Iop Publishing Ltd.: Bristol, UK, 2016; Volume 46. [Google Scholar]
- Arnold, C.L., Jr.; Gibbons, C.J. Impervious surface coverage: The emergence of a key environmental indicator. J. Am. Plan. Assoc. 1996, 2, 243–259. [Google Scholar] [CrossRef]
- Wu, C.; Murray, A.T. Estimating impervious surface distribution by spectral mixture analysis. Remote Sens. Environ. 2003, 84, 493–505. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, H.S.; Lin, H. Improving the impervious surface estimation with combined use of optical and SAR remote sensing images. Remote Sens. Environ. 2014, 141, 155–167. [Google Scholar] [CrossRef]
- Baumann, M.; Ozdogan, M.; Kuemmerle, T.; Wendland, K.J.; Esipova, E.; Radeloff, V.C. Using the landsat record to detect forest-cover changes during and after the collapse of the soviet union in the temperate zone of european Russia. Remote Sens. Environ. 2012, 124, 174–184. [Google Scholar] [CrossRef]
- Bargiel, D. A new method for crop classification combining time series of radar images and crop phenology information. Remote Sens. Environ. 2017, 198, 369–383. [Google Scholar] [CrossRef]
- Schuster, C.; Schmidt, T.; Conrad, C.; Kleinschmit, B.; Foerster, M. Grassland habitat mapping by intra-annual time series analysis-comparison of rapideye and terraSAR-X satellite data. Int. J. Appl. Earth Obs. Geoinfor. 2015, 34, 25–34. [Google Scholar] [CrossRef]
- Arsenault, H.H. Speckle suppression and analysis for synthetic aperture radar images. Opt. Eng. 1985, 25, 636–643. [Google Scholar]
- Zazi, L.; Boutaleb, A.; Guettouche, M.S. Identification and mapping of clay minerals in the region of djebel meni (northwestern algeria) using hyperspectral imaging, eo-1 hyperion sensor. Arab. J. Geosci. 2017, 10, 252. [Google Scholar] [CrossRef]
- Xing, Y.; Zhang, Y.; Li, N.; Wang, R.; Hu, G. Improved superpixel-based polarimetric synthetic aperture radar image classification integrating color features. J. Appl. Remote Sens. 2016, 10, 026026. [Google Scholar] [CrossRef]
- Manjunath, B.S.; Ohm, J.; Vasudevan, V.V.; Yamada, A. Color and texture descriptors. IEEE Trans. Circuits Syst. Video Technol. 1998, 11, 703–715. [Google Scholar] [CrossRef]
- Sun, X.; Lin, X.; Shen, S.; Hu, Z. High-resolution remote sensing data classification over urban areas using random forest ensemble and fully connected conditional random field. ISPRS Int. J. Geo-Inf. 2017, 6, 245. [Google Scholar] [CrossRef]
- Cheng, J.; Ji, Y.; Liu, H. Segmentation-based polsar image classification using visual features: Rhlbp and color features. Remote Sens. 2015, 7, 6079. [Google Scholar] [CrossRef]
- Luo, Y.; Zhao, S.; Zhou, H.; Wang, A.; He, K.; Tan, L. A novel classification method based on texture analysis using high-resolution SAR and optical data. In Proceedings of the International Workshop on Earth Observation & Remote Sensing Applications, Shanghai, China, 8–11 June 2012; pp. 186–190. [Google Scholar]
- Du, P.; Samat, A.; Waske, B.; Liu, S.; Li, Z. Random forest and rotation forest for fully polarized SAR image classification using polarimetric and spatial features. ISPRS J. Photogr. Remote Sens. 2015, 105, 38–53. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Chica-Olmo, M.; Abarca-Hernandez, F.; Atkinson, P.M.; Jeganathan, C. Random forest classification of mediterranean land cover using multi-seasonal imagery and multi-seasonal texture. Remote Sens. Environ. 2012, 121, 93–107. [Google Scholar] [CrossRef]
- Weydahl, D.J. Analysis of ers SAR coherence images acquired over vegetated areas and urban features. Int. J. Remote Sens. 2001, 22, 2811–2830. [Google Scholar] [CrossRef]
- Hütt, C.; Koppe, W.; Miao, Y.; Bareth, G. Best accuracy land use/land cover (lulc) classification to derive crop types using multitemporal, multisensor, and multi-polarization SAR satellite images. Remote Sens. 2016, 8, 684. [Google Scholar] [CrossRef]
- Tan, W.; Liao, R.; Du, Y.; Lu, J.; Li, J. Improving urban impervious surface classification by combining landsat and polsar images: A case study in Kitchener-Waterloo, Ontario, Canada. In Proceedings of the Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 1917–1920. [Google Scholar]
- Zhang, H.; Zhang, Y.; Lin, H. Urban land cover mapping using random forest combined with optical and SAR data. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; Volume 22, pp. 6809–6812. [Google Scholar]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogr. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Pal, M. Random forest classifier for remote sensing classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Pesaresi, M. Texture analysis for urban pattern recognition using fine-resolution panchromatic satellite imagery. Geogr. Environ. Model. 2000, 4, 43–63. [Google Scholar] [CrossRef]
- Senthilnath, J.; Shenoy, H.V.; Rajendra, R.; Omkar, S.N.; Mani, V.; Diwakar, P.G. Integration of speckle de-noising and image segmentation using synthetic aperture radar image for flood extent extraction. J. Earth Syst. Sci. 2013, 122, 559–572. [Google Scholar] [CrossRef]
- Jin, H.; Mountrakis, G.; Stehman, S.V. Assessing integration of intensity, polarimetric scattering, interferometric coherence and spatial texture metrics in palsar-derived land cover classification. ISPRS J. Photogr. Remote Sens. 2014, 98, 70–84. [Google Scholar] [CrossRef]
- Wolter, P.T.; Townsend, P.A. Multi-sensor data fusion for estimating forest species composition and abundance in Northern Minnesota. Remote Sens. Environ. 2011, 115, 671–691. [Google Scholar] [CrossRef]
- McNairn, H.; Shang, J.; Jiao, X.; Champagne, C. The contribution of alos palsar multipolarization and polarimetric data to crop classification. IEEE Trans. Geosci. Remote 2009, 47, 3981–3992. [Google Scholar] [CrossRef]
- Zhou, T.; Zhao, M.; Sun, C.; Pan, J. Exploring the impact of seasonality on urban land-cover mapping using multi-season sentinel-1a and gf-1 wfv images in a subtropical monsoon-climate region. ISPRS Int. J. Geo-Inf. 2018, 7, 3. [Google Scholar] [CrossRef]
- Jia, K.; Li, Q.; Tian, Y.; Wu, B.; Zhang, F.; Meng, J. Crop classification using multi-configuration SAR data in the north china plain. Int. J. Remote Sens. 2012, 33, 170–183. [Google Scholar] [CrossRef]
- Parihar, N.D.A.R.V.S.N.M.S.M.S. Analysis of l-band SAR backscatter and coherence for delineation of land-use/land-cover. Int. J. Remote Sens. 2014, 35, 6781–6799. [Google Scholar] [CrossRef]
- Silva, W.F.; Rudorff, B.F.T.; Formaggio, A.R.; Paradella, W.R.; Mura, J.C. Discrimination of agricultural crops in a tropical semi-arid region of brazil based on l-band polarimetric airborne SAR data. ISPRS J. Photogr. Remote Sens. 2009, 64, 458–463. [Google Scholar] [CrossRef]
- Roychowdhury, K. Comparison between spectral, spatial and polarimetric classification of urban and periurban landcover using temporal sentinel-1 images. In Proceedings of the XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016; pp. 789–796. [Google Scholar]
- Foody, G.M. Status of land cover classification accuracy assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Ai, L.P.; Pang, L.; Liu, H.; Sun, M.X.; He, S.G. High resolution SAR coherence and optical fused images applied in land-use cover classification. In Geo-Informatics in Resource Management and Sustainable Ecosystem; Bian, F., Xie, Y., Eds.; Springer: Berlin, Germany, 2016; Volume 569, pp. 464–470. [Google Scholar]
- Watanabe, M.; Thapa, R.B.; Ohsumi, T.; Fujiwara, H.; Yonezawa, C.; Tomii, N.; Suzuki, S. Detection of damaged urban areas using interferometric SAR coherence change with PALSAR-2. Earth Planets Space 2016, 68, 12. [Google Scholar] [CrossRef]
- Uhlmann, S.; Kiranyaz, S. Integrating color features in polarimetric SAR image classification. IEEE Trans. Geosci. Remote 2014, 52, 2197–2216. [Google Scholar] [CrossRef]
- Gessner, U.; Machwitz, M.; Esch, T.; Tillack, A.; Naeimi, V.; Kuenzer, C.; Dech, S. Multi-sensor mapping of west african land cover using modis, asar and TanDEM-X/TerraSAR-X data. Remote Sens. Environ. 2015, 164, 282–297. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E.; Rogan, J.; Kellndorfer, J. Assessment of spectral, polarimetric, temporal, and spatial dimensions for urban and peri-urban land cover classification using landsat and SAR data. Remote Sens. Environ. 2012, 117, 72–82. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Pulliainen, J.; Koponen, S.; Hallikainen, M. Application of an empirical neural network to surface water quality estimation in the gulf of finland using combined optical data and microwave data. Remote Sens. Environ. 2002, 81, 327–336. [Google Scholar] [CrossRef]
- Sameen, M.I.; Nahhas, F.H.; Buraihi, F.H.; Pradhan, B.; Shariff, A.R.B.M. A refined classification approach by integrating landsat operational land imager (oli) and RADARSAT-2 imagery for land-use and land-cover mapping in a tropical area. Int. J. Remote Sens. 2016, 37, 2358–2375. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Imaging Model | Incident Angle (◦) | Product | Polarization |
|---|---|---|---|---|
| 1 July 2015 | IW | 39.08 | SLC | VV/VH |
| 25 July 2015 | IW | 39.08 | SLC | VV/VH |
| 18 August 2015 | IW | 39.08 | SLC | VV/VH |
| 11 September 2015 | IW | 39.08 | SLC | VV/VH |
| Class | Number of Training Pixels | Number of Validation Pixels |
|---|---|---|
| WAT | 563 | 577 |
| FOR | 544 | 565 |
| BIS | 521 | 527 |
| DIS | 546 | 531 |
| GRA | 506 | 478 |
| ID | Combinations Code | Description |
|---|---|---|
| 1 | VV + VH | Backscatter intensity features of all four Sentinel-1A images |
| 2 | T | Texture features of all four Sentinel-1A images |
| 3 | C1 | Coherence features of all four Sentinel-1A images |
| 4 | C2 | Color features of all four Sentinel-1A images |
| 5 | VV + VH + T | Backscatter intensity and texture features of all four Sentinel-1A images |
| 6 | VV + VH + C1 | Backscatter intensity and coherence features of all four Sentinel-1A images |
| 7 | VV + VH + C2 | Backscatter intensity and color features of all four Sentinel-1A images |
| 8 | T + C1 | Texture and coherence features of all four Sentinel-1A images |
| 9 | T + C2 | Texture and color features of all four Sentinel-1A images |
| 10 | C1 + C2 | Coherence and color features of all four Sentinel-1A images |
| 11 | VV + VH + T + C1 | Combination of backscatter intensity, texture, and coherence features of all four Sentinel-1A images |
| 12 | VV + VH + T + C2 | Combination of backscatter intensity, texture, and color features of all four Sentinel-1A images |
| 13 | VV + VH + C1 + C2 | Combination of backscatter intensity, coherence, and color features of all four Sentinel-1A images |
| 14 | T + C1 + C2 | Combination of texture, coherence, and color features of all four Sentinel-1A images |
| 15 | L | Landsat-8 data |
| 16 | E | EO-1 Hyperion data |
| 17 | VV + VH + T + C1 + C2 | Combination of backscatter intensity, texture, coherence, and color features of all four Sentinel-1A images |
| 18 | VV + VH + T + C1 + C2 + L | Combination of Sentinel-1A (backscatter intensity, texture, coherence, and color features) and Landsat-8 data |
| 19 | VV + VH + T + C1 + C2 + E | Combination of Sentinel-1A (backscatter intensity, texture, coherence, and color features) and EO-1 Hyperion data |
| ID | F1 Measure (%) | Overall Accuracy (%) | Kappa | ||||
|---|---|---|---|---|---|---|---|
| WAT | FOR | GRA | BIS | DIS | |||
| VV + VH | 91.70 | 80.39 | 75.74 | 38.46 | 76.52 | 76.23 | 0.6988 |
| T | 93.86 | 94.03 | 81.71 | 79.49 | 87.76 | 89.08 | 0.8621 |
| C1 | 51.93 | 51.55 | 45.94 | 70.66 | 73.68 | 58.45 | 0.4734 |
| C2 | 84.40 | 80.67 | 59.11 | 47.57 | 69.45 | 71.48 | 0.6384 |
| VV + VH + T | 94.42 | 94.96 | 85.21 | 79.81 | 87.81 | 89.44 | 0.8668 |
| VV + VH + C1 | 92.75 | 93.01 | 85.03 | 75.00 | 80.93 | 86.44 | 0.8288 |
| VV + VH + C2 | 92.15 | 80.91 | 76.65 | 38.99 | 76.77 | 76.41 | 0.7009 |
| T + C1 | 94.93 | 96.00 | 87.64 | 85.71 | 88.78 | 91.55 | 0.8935 |
| T + C2 | 94.53 | 94.29 | 85.72 | 81.90 | 89.11 | 89.96 | 0.8734 |
| C1 + C2 | 84.83 | 82.35 | 60.44 | 73.52 | 81.25 | 78.17 | 0.7232 |
| VV + VH + T + C1 | 94.97 | 96.40 | 88.14 | 86.57 | 90.38 | 91.90 | 0.8978 |
| VV + VH + T + C2 | 94.93 | 95.27 | 85.88 | 82.14 | 89.85 | 90.14 | 0.8757 |
| VV + VH + C1 + C2 | 94.58 | 93.66 | 86.75 | 76.60 | 82.35 | 87.85 | 0.8466 |
| T + C1 + C2 | 95.62 | 96.35 | 87.72 | 88.84 | 90.73 | 92.95 | 0.9113 |
| ID | F1 Measure (%) | Overall Accuracy (%) | Kappa | ||||
|---|---|---|---|---|---|---|---|
| WAT | FOR | GRA | BIS | DIS | |||
| L | 97.52 | 98.00 | 94.30 | 96.04 | 93.52 | 95.89 | 0.9480 |
| E | 97.00 | 97.59 | 92.74 | 92.90 | 93.34 | 95.11 | 0.9370 |
| VV + VH + T + C1 + C2 | 97.11 | 96.47 | 90.18 | 89.02 | 90.82 | 93.13 | 0.9135 |
| VV + VH + T + C1 + C2 + L | 97.52 | 99.28 | 94.61 | 95.57 | 95.61 | 96.83 | 0.9600 |
| VV + VH + T + C1 + C2 + E | 98.95 | 99.96 | 98.16 | 99.02 | 99.03 | 99.12 | 0.9889 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, T.; Li, Z.; Pan, J. Multi-Feature Classification of Multi-Sensor Satellite Imagery Based on Dual-Polarimetric Sentinel-1A, Landsat-8 OLI, and Hyperion Images for Urban Land-Cover Classification. Sensors 2018, 18, 373. https://doi.org/10.3390/s18020373
Zhou T, Li Z, Pan J. Multi-Feature Classification of Multi-Sensor Satellite Imagery Based on Dual-Polarimetric Sentinel-1A, Landsat-8 OLI, and Hyperion Images for Urban Land-Cover Classification. Sensors. 2018; 18(2):373. https://doi.org/10.3390/s18020373
Chicago/Turabian StyleZhou, Tao, Zhaofu Li, and Jianjun Pan. 2018. "Multi-Feature Classification of Multi-Sensor Satellite Imagery Based on Dual-Polarimetric Sentinel-1A, Landsat-8 OLI, and Hyperion Images for Urban Land-Cover Classification" Sensors 18, no. 2: 373. https://doi.org/10.3390/s18020373
APA StyleZhou, T., Li, Z., & Pan, J. (2018). Multi-Feature Classification of Multi-Sensor Satellite Imagery Based on Dual-Polarimetric Sentinel-1A, Landsat-8 OLI, and Hyperion Images for Urban Land-Cover Classification. Sensors, 18(2), 373. https://doi.org/10.3390/s18020373