A Novel Unsupervised Segmentation Quality Evaluation Method for Remote Sensing Images



Abstract
:1. Introduction
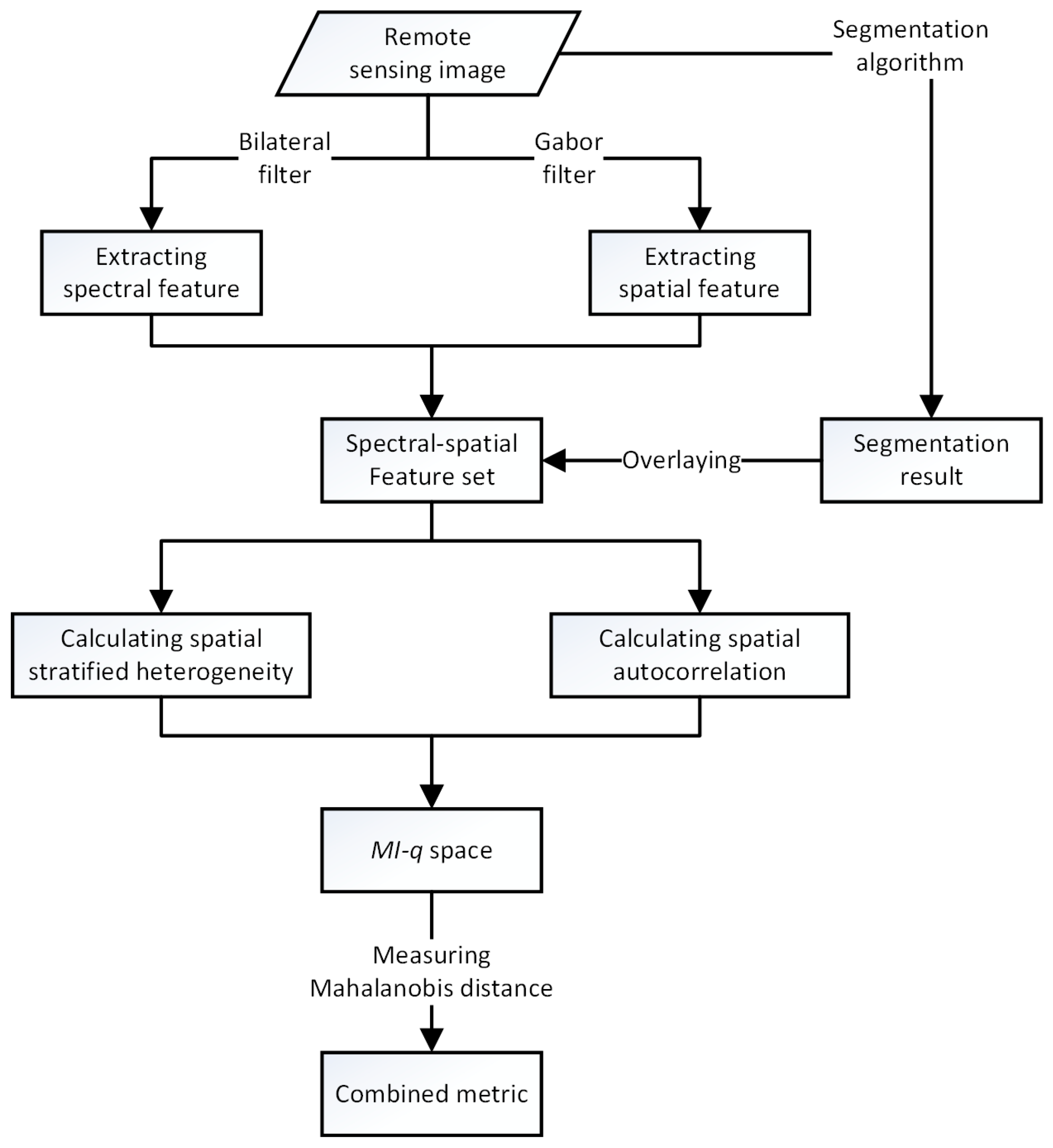
2. Methods
2.1. Extraction of Feature Set
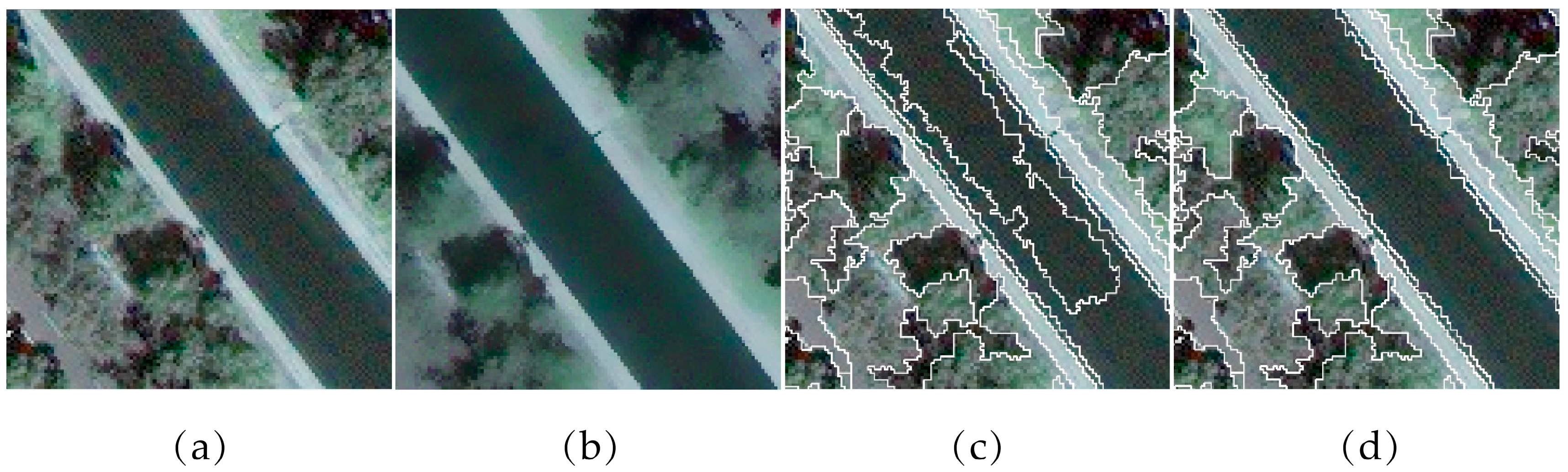
2.1.1. Spectral Feature Extraction
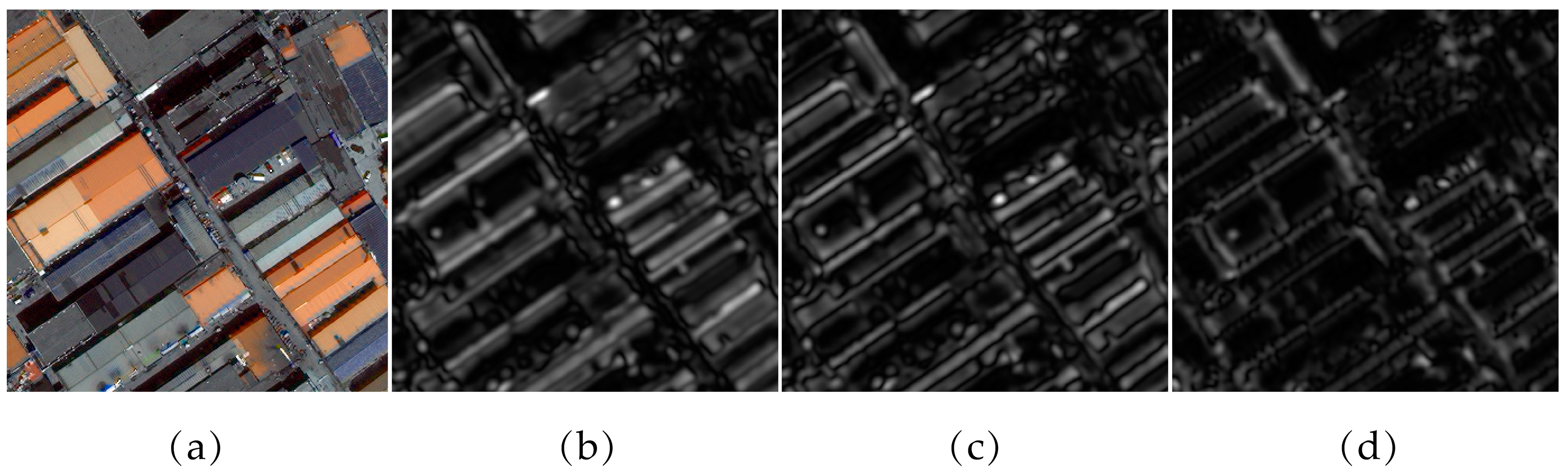
2.1.2. Spatial Feature Extraction
2.2. Spatial Stratified Heterogeneity and Autocorrelation
2.3. Combination Strategy
2.4. Other Evaluation Measures
2.5. Segmentation Methods
3. Experiments
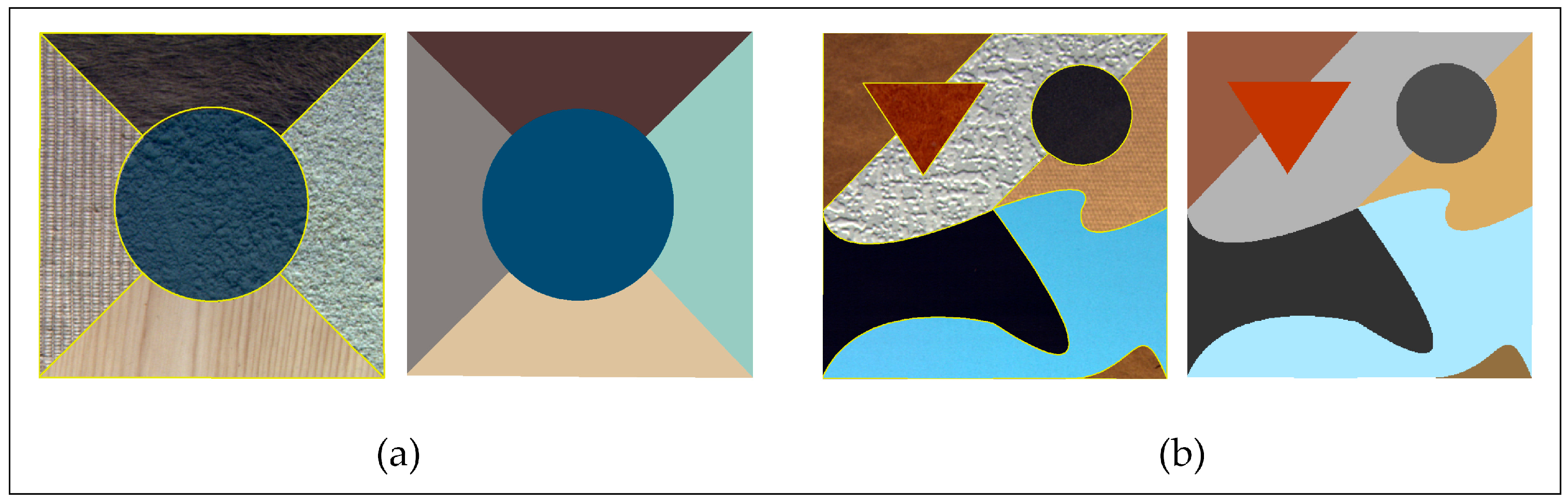
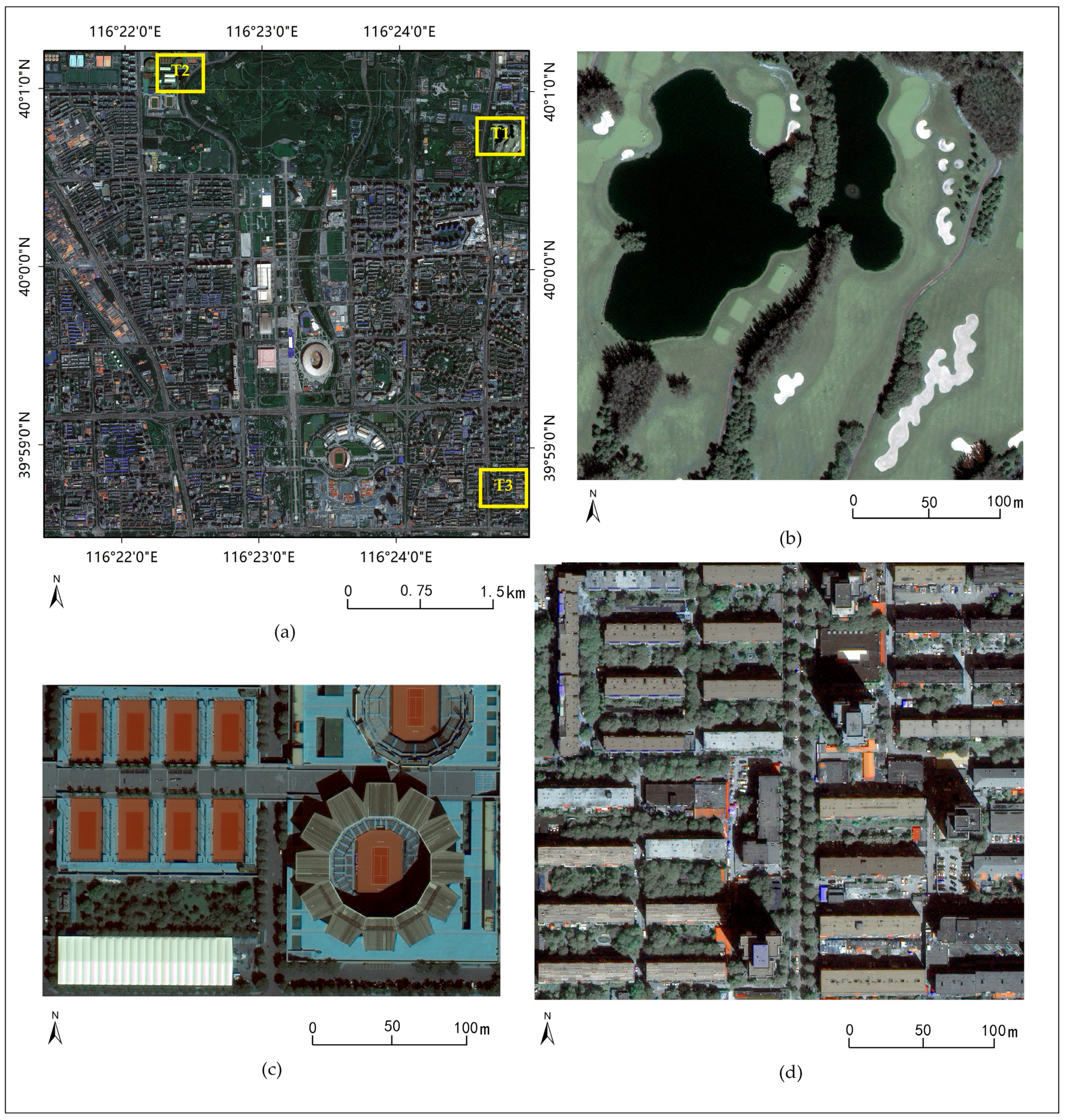
3.1. Experimental Data
3.2. Experimental Setting
3.3. Results and Analysis
3.3.1. Effectiveness of the Feature Set
3.3.2. Effectiveness of -Statistics and Metric
3.3.3. Effectiveness of the Metric
4. Discussion
- (1)
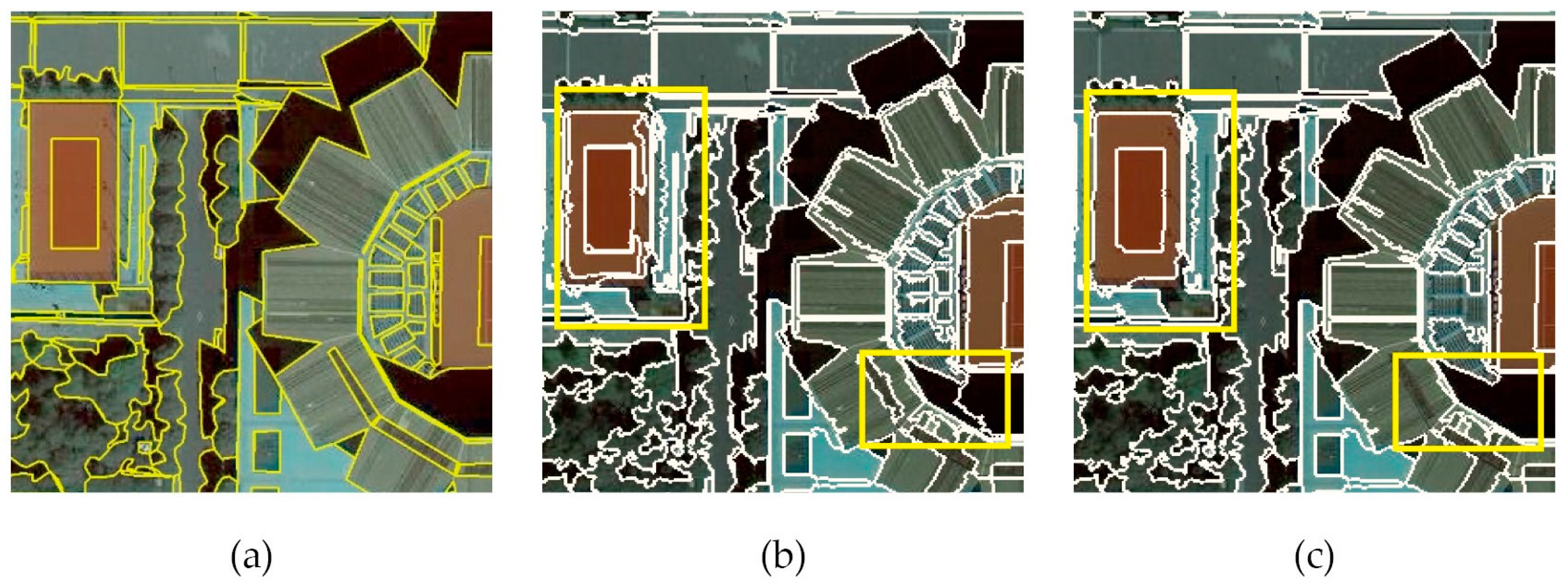
- In the experiments, and were calculated from the spectral-spatial feature set rather than from the raw images. The evaluation of testing images with reference segmentation indicates that the feature enhanced images are superior to the original images for describing real objects. The optimal results indicated by are more likely to approach the results desired by evaluators. However, if only the original spectral features of the remote sensing images containing complicated land cover are used for evaluation, the assessment criterion may not be sufficient to indicate the segmentation quality accurately in terms of the real forms of the objects, and the optimal parameter and segmentation result selected by may be inconsistent with a visual perception of the objects. The spectral features extracted using the bilateral filter help evaluate the indicator while ignoring slight intensity variations within the objects. The spatial features extracted using the Gabor filter provides complementary edge and texture information. In practical applications, the optimal segmentation result selected using a spectral-spatial feature set is more consistent with the spatial distribution of the landscapes in the real world, as discussed in Section 3.3. It is impractical to attempt to obtain exact ground truth of remote sensing images during segmentation evaluation. The use of spectral-spatial features can overcome some disadvantages of unsupervised measures without using a reference image.
- (2)
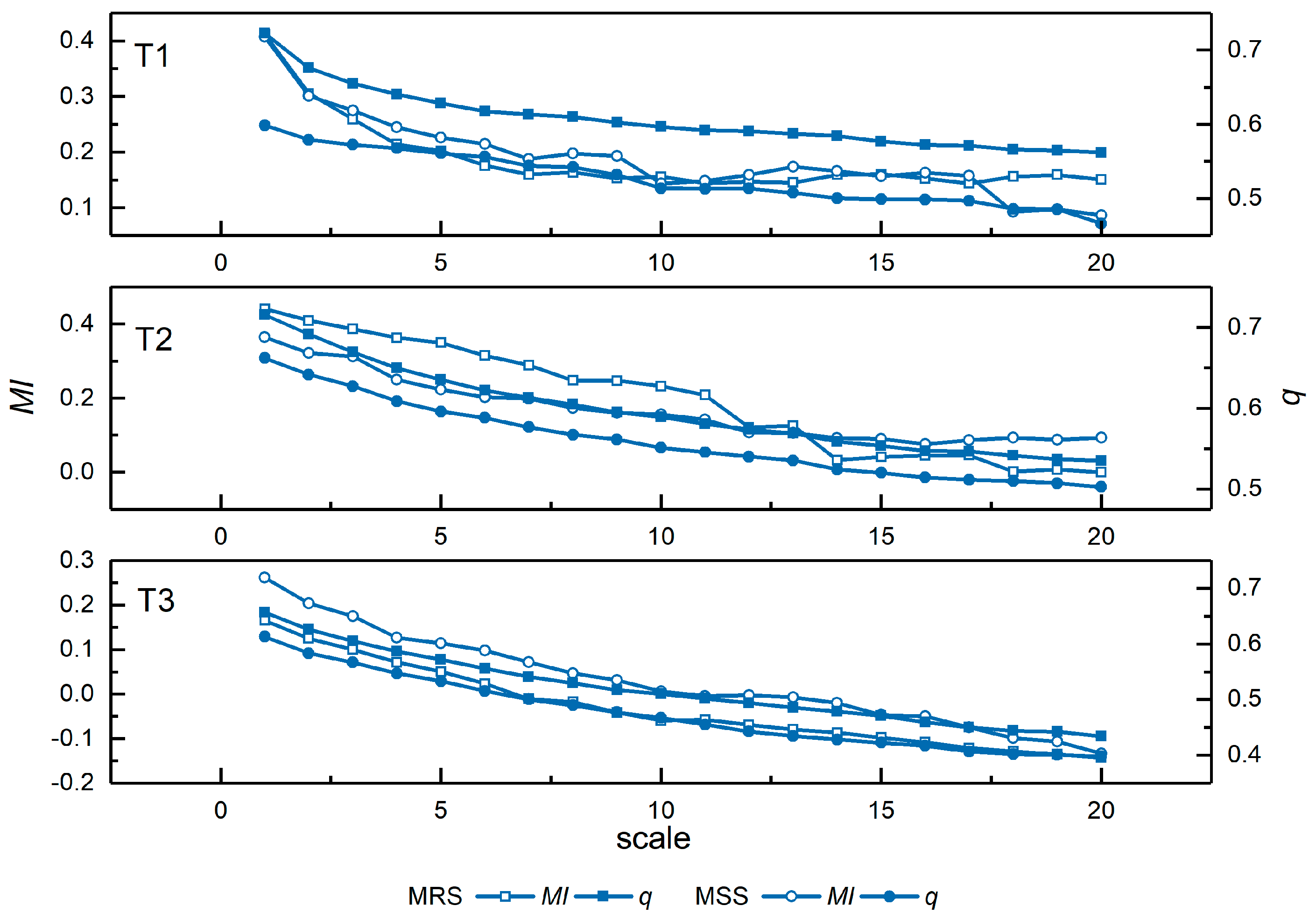
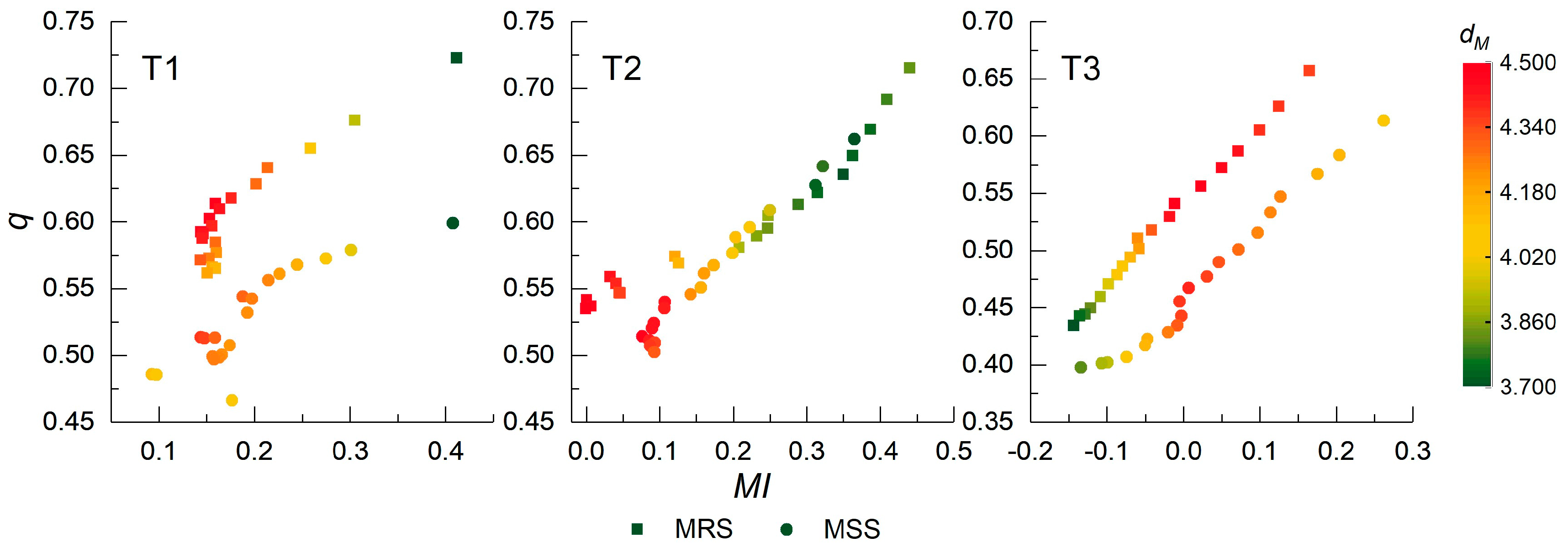
- As a significant indicator in geostatistics, the introduced spatial stratified heterogeneity can successfully indicate the intra-segmentation property, as demonstrated by Figure 8. The spatial autocorrelation metricis able to indicate the inter-segmentation dissimilarity. Both indicators are sensitive to the variation of the segmentation results for all testing images, and they supplement each other for segmentation evaluation. These two indicators are combined to reveal the segmentation quality by achieving the balance between them. The proposed combination strategy using the Mahalanobis distance between quality points, which is calculated by the andvalues and the point (1,0) in the space, is an effective criterion that can be intuitively visualized by geometric illustration. The position of each quality point in space represents a certain state of segmentation, which can be seen in Figure 9. In the case of over-segmentation, both and are large, and the corresponding quality point is located in the upper-right portion of the space. In contrast, both small and values indicate under-segmentation and the quality point is located in the bottom-left portion of the space.
- (3)
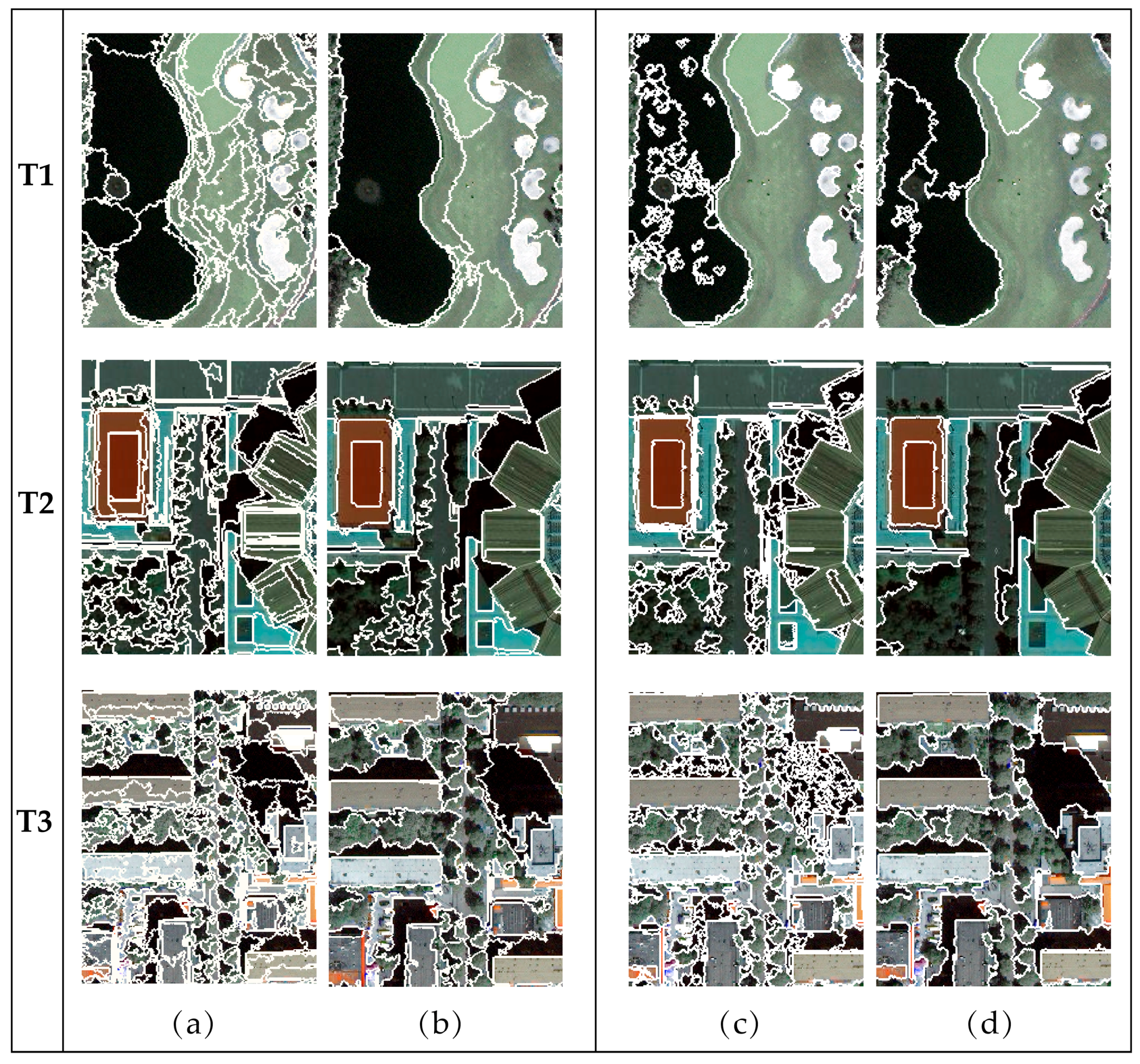
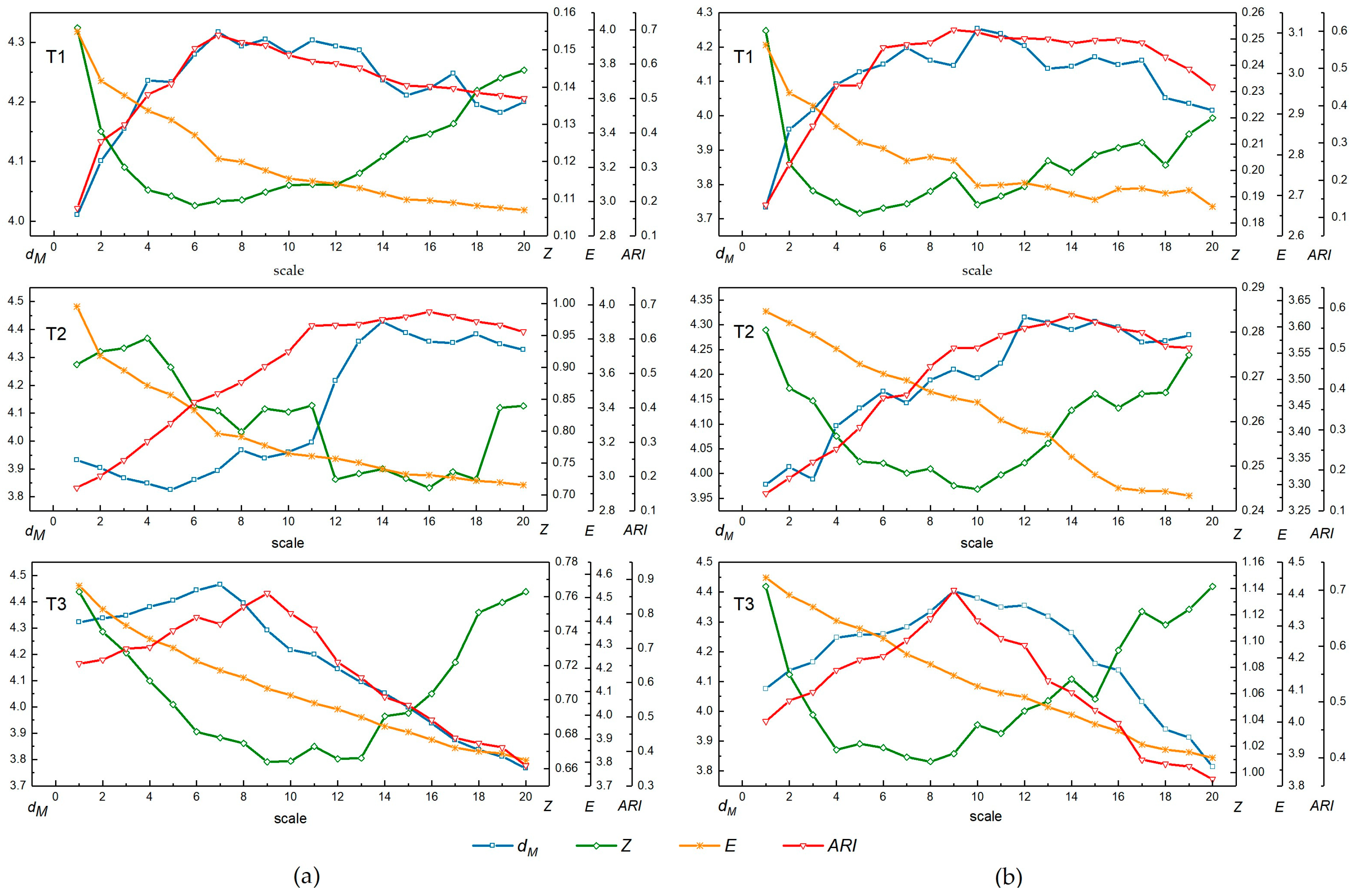
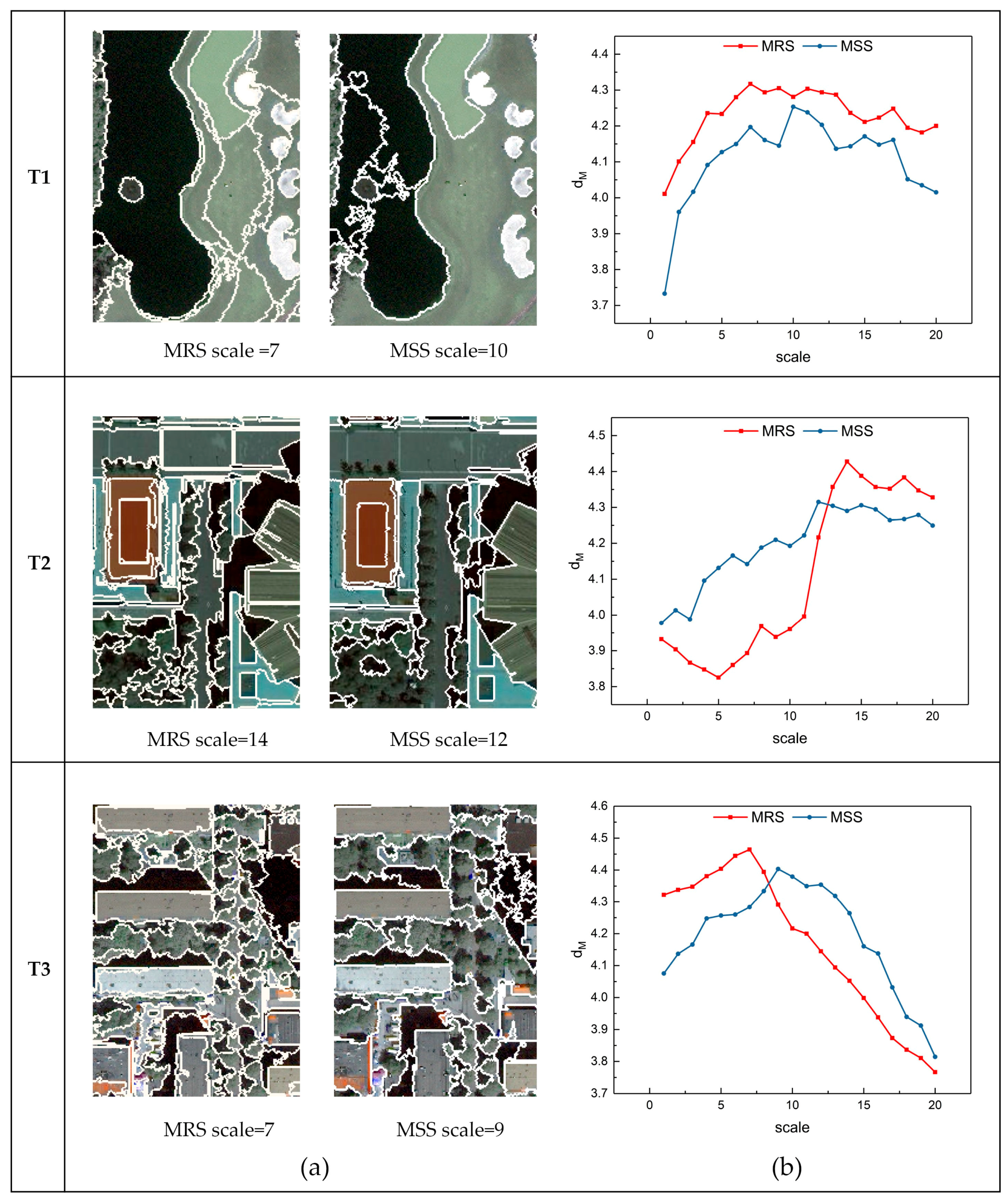
- The effectiveness of the metric was confirmed by conducting experiments to determine optimal parameter selection and compare different segmentation algorithms. Relative to other existing unsupervised evaluations, illustrates the segmentation results more clearly. Specifically, cannot respond to change in scales from over- to under-segmentation, and the sensitivity and response of to different segmentations is similar to . The selection of optimal segmentation is slightly different. Rank correlation analysis quantitatively indicates that achieves results closer to the supervised method ARI, which is relatively reliable compared to unsupervised measures. Moreover, the visual analysis in Section 3.3 further confirms the effectiveness of in comparison with other segmentation algorithms. The relationship between the characteristics of multiple testing images and the segmentation algorithms with different parameters is presented clearly by the variation of , and facilitates the next steps of the analysis, such as classification and object detection.
- (4)
- The main factor that affects an evaluation method’s use of computational resources is the number of segments. Analyzing each evaluation method with an input-data size n, the computational complexity described using big O notion is O for method and O for methods and ARI. For method because matrix operations are involved in calculating the Mahalanobis distance, the computational complexity initially appears higher than for other methods. However, the dimensions of the matrix depend on the number of segmentation results involved in evaluation, which is generally not within the same order of magnitude as the number of segments. Therefore, the influence of matrix operations in can often be ignored, resulting in a computational complexity similar to the method and ARI. However, when the number of segmentation results participating in the evaluation is no negligible compared with the number of segments, the computational complexity of is higher than that of the other methods because of the matrix operations. The Euclidean distance can then be used as a substitute in the combination strategy to reduce the computation load.
- (1)
- Although the spectral-spatial feature used in the proposed method is advantageous for representing real objects, the method of constructing feature models and the choice of extractors still could be optimized. In addition, the strategy used to stack the spectral and spatial features involves simple combination. A more sophisticated strategy could be developed that might extract features more efficiently and accurately.
- (2)
- Scale is important for the interpretation of remote sensing images and is an important parameter of the segmentation algorithms. This paper only focuses on the optimal choice of the scale parameter in segmentation quality evaluation. The universality and robustness of the proposed method should be verified for the other segmentation parameters.
- (3)
- The experiment only tested three sub-images from the same WorldView-3 scene. However, in practices of GEOBIA, it is necessary to evaluate the integrated image segmentation results, which may consume a large amount of computing resources. Thus, to increase efficiency, small and randomly selected sub-images could be used as samples to evaluate the segmentation results of a large-scale image.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Blaschke, T. What’s wrong with pixels? Some recent developments interfacing remote sensing and GIS. GeoBIT/GIS 2001, 6, 12–17. [Google Scholar]
- Kim, M.; Warner, T.A.; Madden, M.; Atkinson, D.S. Multi-scale geobia with very high spatial resolution digital aerial imagery: Scale, texture and image objects. Int. J. Remote Sens. 2011, 32, 2825–2850. [Google Scholar] [CrossRef]
- Marpu, P.R. Geographic object-based image analysis. Univ. Freiberg. 2009. [Google Scholar] [CrossRef]
- Yu, Q. Object-based detailed vegetation classification with airborne high spatial resolution remote sensing imagery. Photogramm. Eng. Remote Sens. 2006, 72, 799–811. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; Meer, F.V.D.; Werff, H.V.D.; Coillie, F.V. Geographic object-based image analysis—Towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Burnett, C.; Blaschke, T. A multi-scale segmentation/object relationship modelling methodology for landscape analysis. Ecol. Model. 2003, 168, 233–249. [Google Scholar] [CrossRef]
- Johnson, B.; Xie, Z. Unsupervised image segmentation evaluation and refinement using a multi-scale approach. ISPRS J. Photogramm. Remote Sens. 2011, 66, 473–483. [Google Scholar] [CrossRef]
- Gao, Y.; Mas, J.F.; Kerle, N.; Pacheco, J.A.N. Optimal region growing segmentation and its effect on classification accuracy. Int. J. Remote Sens. 2011, 32, 3747–3763. [Google Scholar] [CrossRef]
- Neubert, M.; Herold, H.; Meinel, G. Assessing image segmentation quality—Concepts, methods and application. Lect. Notes Geoinf. Cartogr. 2008, 769–784. [Google Scholar] [CrossRef]
- Zhang, H.; Fritts, J.E.; Goldman, S.A. Image Segmentation Evaluation: A Survey of Unsupervised Methods; Elsevier Science Inc.: Toronto, ON, Canada, 2008; pp. 260–280. [Google Scholar]
- Zhang, Y.J. A review of recent evaluation methods for image segmentation. In Proceedings of the 2001 Sixth International Symposium on Signal Processing and ITS Applications, Kuala Lumpur, Malaysia, 13–16 August 2001; Volume 141, pp. 148–151. [Google Scholar]
- Clinton, N.; Holt, A.; Scarborough, J.; Yan, L.; Gong, P. Accuracy assessment measures for object-based image segmentation goodness. Photogramm. Eng. Remote Sens. 2010, 76, 289–299. [Google Scholar] [CrossRef]
- Martin, D.R. An empirical approach to grouping and segmentation. In Proceedings of the International Symposium on Physical Design, Monterey, CA, USA, 6–9 April 2003. [Google Scholar]
- Cardoso, J.S.; Cortereal, L. Toward a generic evaluation of image segmentation. IEEE Trans. Image Process. A Publ. IEEE Signal Process. Soc. 2005, 14, 1773–1782. [Google Scholar] [CrossRef]
- Molenaar, M. Quality assessment for geo-spatial objects derived from remotely sensed data. Int. J. Remote Sens. 2005, 26, 2953–2974. [Google Scholar]
- Möller, M.; Lymburner, L.; Volk, M. The comparison index: A tool for assessing the accuracy of image segmentation. Int. J. Appl. Earth Observ. Geoinf. 2007, 9, 311–321. [Google Scholar] [CrossRef]
- Marpu, P.R.; Neubert, M.; Herold, H.; Niemeyer, I. Enhanced evaluation of image segmentation results. J. Spat. Sci. 2010, 55, 55–68. [Google Scholar] [CrossRef]
- Persello, C.; Bruzzone, L. A novel protocol for accuracy assessment in classification of very high resolution images. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1232–1244. [Google Scholar] [CrossRef]
- Liu, Y.; Bian, L.; Meng, Y.; Wang, H.; Zhang, S.; Yang, Y.; Shao, X.; Wang, B. Discrepancy measures for selecting optimal combination of parameter values in object-based image analysis. ISPRS J. Photogramm. Remote Sens. 2012, 68, 144–156. [Google Scholar] [CrossRef]
- Witharana, C.; Civco, D.L. Optimizing multi-resolution segmentation scale using empirical methods: Exploring the sensitivity of the supervised discrepancy measure Euclidean distance 2 (ED2). ISPRS J. Photogramm. Remote Sens. 2014, 87, 108–121. [Google Scholar] [CrossRef]
- Zhang, X.; Feng, X.; Xiao, P.; He, G.; Zhu, L. Segmentation quality evaluation using region-based precision and recall measures for remote sensing images. ISPRS J. Photogramm. Remote Sens 2015, 102, 73–84. [Google Scholar] [CrossRef]
- Chabrier, S.; Emile, B.; Rosenberger, C.; Laurent, H. Unsupervised performance evaluation of image segmentation. Eur. J. Adv. Signal Process. 2006, 2006, 217. [Google Scholar] [CrossRef]
- Pichel, J.C.; Singh, D.E.; Rivera, F.F. Image segmentation based on merging of sub-optimal segmentations. Pattern Recognit. Lett. 2006, 27, 1105–1116. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shapiro, L.G. Image segmentation techniques. Comput. Vis. Graph. Image Process. 1985, 29, 100–132. [Google Scholar] [CrossRef]
- Beurs, K.D. Complexity metrics to quantify semantic accuracy in segmented landsat images. Int. J. Remote Sens. 2005, 26, 2937–2951. [Google Scholar]
- Espindola, G.M.; Camara, G.; Reis, I.A.; Bins, L.S.; Monteiro, A.M. Parameter selection for region-growing image segmentation algorithms using spatial autocorrelation. Int. J. Remote Sens. 2006, 27, 3035–3040. [Google Scholar] [CrossRef]
- Kim, M.; Madden, M.; Warner, T. Estimation of Optimal Image Object Size for the Segmentation of Forest Stands with Multispectral Ikonos Imagery; Springer: Berlin/Heidelberg, Germany, 2008; pp. 291–307. [Google Scholar]
- Kim, M.H.; Madden, M.; Warner, T.A. Forest type mapping using object-specific texture measures from multispectral ikonos imagery: Segmentation quality and image classification issues. Photogramm. Eng. Remote Sens. 2009, 75, 819–829. [Google Scholar] [CrossRef]
- Radoux, J.; Defourny, P. Quality Assessment of Segmentation Results Devoted to Object-Based Classification; Springer: Berlin/Heidelberg, Germany, 2008; pp. 403–421. [Google Scholar]
- Faur, D.; Gavat, I.; Datcu, M. Salient remote sensing image segmentation based on rate-distortion measure. IEEE Geosci. Remote Sens. Lett. 2009, 6, 855–859. [Google Scholar] [CrossRef]
- Corcoran, P.; Winstanley, A.; Mooney, P. Segmentation performance evaluation for object-based remotely sensed image analysis. Int. J. Remote Sens. 2010, 31, 617–645. [Google Scholar] [CrossRef]
- Zhang, X.; Xiao, P.; Feng, X. An unsupervised evaluation method for remotely sensed imagery segmentation. IEEE Geosci. Remote Sens. Lett. 2012, 9, 156–160. [Google Scholar] [CrossRef]
- Troya-Galvis, A.; Gançarski, P.; Passat, N.; Berti-Équille, L. Unsupervised quantification of under- and over-segmentation for object-based remote sensing image analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1936–1945. [Google Scholar] [CrossRef]
- Shi, R.; Ngan, K.N.; Li, S. Objectness based unsupervised object segmentation quality evaluation. In Proceedings of the Seventh International Conference on Information Science and Technology, Da Nang, Vietnam, 16–19 April 2017; pp. 256–258. [Google Scholar]
- Böck, S.; Immitzer, M.; Atzberger, C. On the objectivity of the objective function—Problems with unsupervised segmentation evaluation based on global score and a possible remedy. Remote Sens. 2017, 9, 769. [Google Scholar] [CrossRef]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the Sixth International Conference on Computer Vision, Bombay, India, 7 January 1998; pp. 839–846. [Google Scholar]
- Lee, T.S. Image representation using 2D gabor wavelet. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 18, 959–971. [Google Scholar]
- Wang, J.F.; Li, X.H.; Christakos, G.; Liao, Y.L.; Zhang, T.; Gu, X.; Zheng, X.Y. Geographical detectors-based health risk assessment and its application in the neural tube defects study of the Heshun Region, China. Int. J. Geogr. Inf. Sci. 2010, 24, 107–127. [Google Scholar] [CrossRef]
- Wang, J.F.; Zhang, T.L.; Fu, B.J. A measure of spatial stratified heterogeneity. Ecol. Indic. 2016, 67, 250–256. [Google Scholar] [CrossRef]
- Fotheringham, A.S.; Brunsdon, C.; Charlton, M. Quantitative Geography: Perspectives on Spatial Data Analysis; Isaaks, E., Srivastava, R.M., Eds.; Sage Publications: New York, NY, USA, 2000; Volume 50, pp. 143–163. [Google Scholar]
- Mahalanobis, P.C. On the generalised distance in statistics. Proc. Natl. Inst. Sci. USA 1936, 2, 49–55. [Google Scholar]
- Zhang, H.; Fritts, J.E. Entropy-based objective evaluation method for image segmentation. SPIE 2003, 5307, 38–49. [Google Scholar]
- Borsotti, M.; Campadelli, P.; Schettini, R. Quantitative evaluation of color image segmentation results. Pattern Recognit. Lett. 1998, 19, 741–747. [Google Scholar] [CrossRef]
- Hubert, L.; Arabie, P. Comparing partitions. J. Classif. 1985, 2, 193–218. [Google Scholar] [CrossRef]
- Rand, W.M. Objective criteria for the evaluation of clustering methods. J. Am. Stat. Assoc. 1971, 66, 846–850. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. An optimization approach for high quality multi-scale image segmentation. In Proceedings of the Beiträge zum AGIT-Symposium, karlsruhe, Germany, January 2000; pp. 12–23. [Google Scholar]
- Comaniciu, D.; Meer, P. A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 5. [Google Scholar] [CrossRef]
- Laben, C.A.; Brower, B.V. Process for Enhancing the Spatial Resolution of Multispectral Imagery Using Pan-Sharpening. U.S. Patent US6011875 A, 4 January 2000. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Intra-Segment | Inter-Segment | Intra-and Inter-Segment |
|---|---|---|---|
| Metrics | Metrics | Combination | |
| E | Entropy | Entropy | Sum |
| Squared color error | Heterogeneity | Weighted sum | |
| Spatial stratified heterogeneity | Spatial autocorrelation | Mahalanobis distance |
| Scale | MRS | MSS | Scale | MRS | MSS |
|---|---|---|---|---|---|
| p/L | p/L | p/L | p/L | ||
| 1 | 25/1826 | 30/1846 | 11 | 75/257 | 345/255 |
| 2 | 30/1274 | 46/1270 | 12 | 80/237 | 389/234 |
| 3 | 35/968 | 65/974 | 13 | 85/215 | 418/214 |
| 4 | 40/763 | 90/762 | 14 | 90/193 | 500/193 |
| 5 | 45/625 | 117/626 | 15 | 95/177 | 560/175 |
| 6 | 50/510 | 155/508 | 16 | 100/154 | 700/154 |
| 7 | 55/424 | 188/424 | 17 | 105/137 | 800/136 |
| 8 | 60/370 | 220/369 | 18 | 110/127 | 900/126 |
| 9 | 65/321 | 264/320 | 19 | 115/124 | 920/123 |
| 10 | 70/289 | 305/287 | 20 | 120/114 | 1100/114 |
| Base Image | |||
|---|---|---|---|
| S1/S2 | S1/S2 | S1/S2 | |
| Original image | 0.901/0.873 | 0.011/0.366 | 2.480/2.175 |
| Feature enhanced image | 0.926/0.943 | 0.011/0.351 | 2.512/2.308 |
| Ground truth | 1.000/1.000 | 0.010/0.043 | 2.601/2.808 |
| Base Image | |||
|---|---|---|---|
| T1/T2/T3 | T1/T2/T3 | T1/T2/T3 | |
| Original image | 0.784/0.610/0.701 | 0.301/0.259/0.159 | 2.218/1.975/2.230 |
| Feature enhanced image | 0.806/0.639/0.726 | 0.300/0.234/0.132 | 2.252/2.009/2.305 |
| Ground truth | 1.000/1.000/1.000 | 0.191/−0.001/0.076 | 2.710/2.907/2.775 |
| Testing Image | |||
|---|---|---|---|
| T1 | 0.926/0.821 | −0.806/−0.196 | 0.008/−0.376 |
| T2 | 0.872/0.934 | −0.827/−0.152 | −0.816/−0.737 |
| T3 | 0.833/0.923 | −0.677/0.898 | 0.681/0.498 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, H.; Tang, Y.; Jing, L.; Li, H.; Ding, H. A Novel Unsupervised Segmentation Quality Evaluation Method for Remote Sensing Images. Sensors 2017, 17, 2427. https://doi.org/10.3390/s17102427
Gao H, Tang Y, Jing L, Li H, Ding H. A Novel Unsupervised Segmentation Quality Evaluation Method for Remote Sensing Images. Sensors. 2017; 17(10):2427. https://doi.org/10.3390/s17102427
Chicago/Turabian StyleGao, Han, Yunwei Tang, Linhai Jing, Hui Li, and Haifeng Ding. 2017. "A Novel Unsupervised Segmentation Quality Evaluation Method for Remote Sensing Images" Sensors 17, no. 10: 2427. https://doi.org/10.3390/s17102427
APA StyleGao, H., Tang, Y., Jing, L., Li, H., & Ding, H. (2017). A Novel Unsupervised Segmentation Quality Evaluation Method for Remote Sensing Images. Sensors, 17(10), 2427. https://doi.org/10.3390/s17102427