Game Theory-Based Cooperation for Underwater Acoustic Sensor Networks: Taxonomy, Review, Research Challenges and Directions



 ,
,
Abstract
:1. Introduction
- (1)
- Sensor nodes are energy constrained because they are battery powered.
- (2)
- The propagation delay of acoustic channels is five orders of magnitude slower than RF signals in terrestrial channel due to low speed of sound which is 1500 m/s.
- (3)
- The bandwidth is limited and depends mainly on the distance because of high transmission loss with high frequencies and high environmental noise with low frequencies [13].
- (4)
- Nodes are prone to failures due to corrosion and fouling.
- (5)
- We conduct a comprehensive review of different factors affecting cooperation in UASNs.
- Various techniques that are used in UASNs are presented and summarized from different perspectives and a taxonomy for underwater cooperation is presented.
- We further analyze different methods and compare their performance using different metrics in which our analysis shows that cooperative game theoretic based approaches are the most suitable and promising methods to provide cooperation in UASNs.
- We also discuss open issues and future research directions in UASNs.
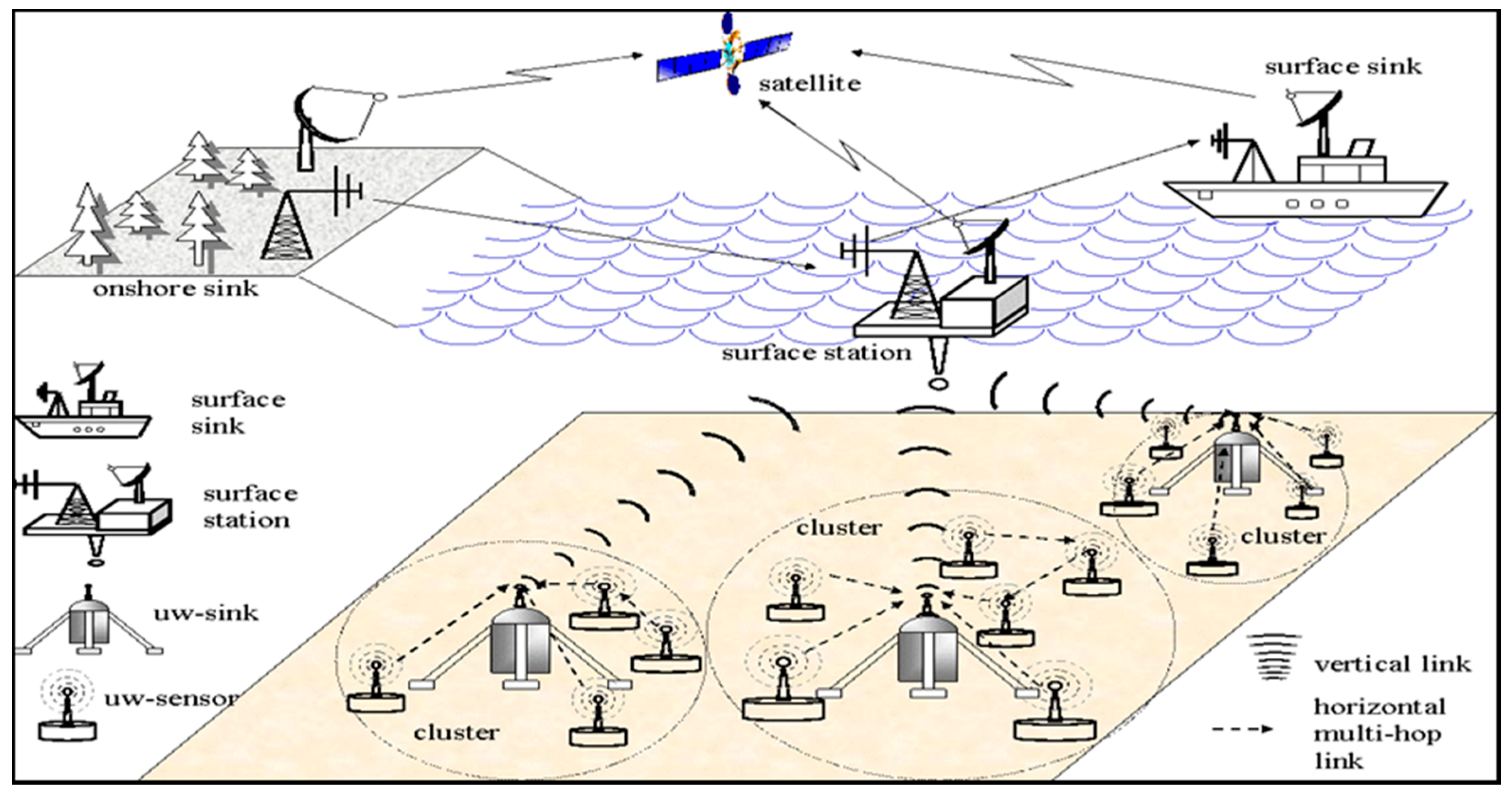
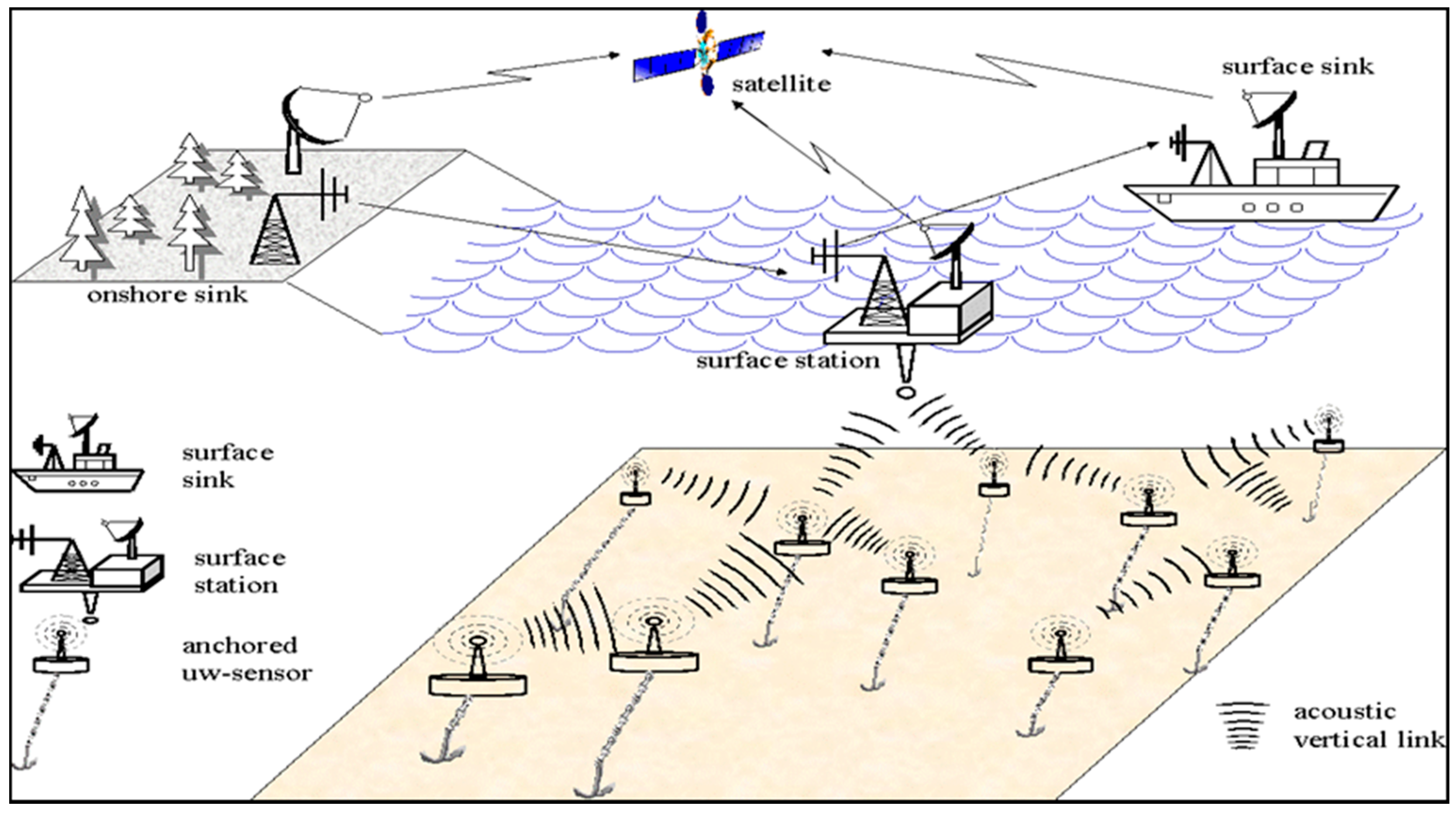
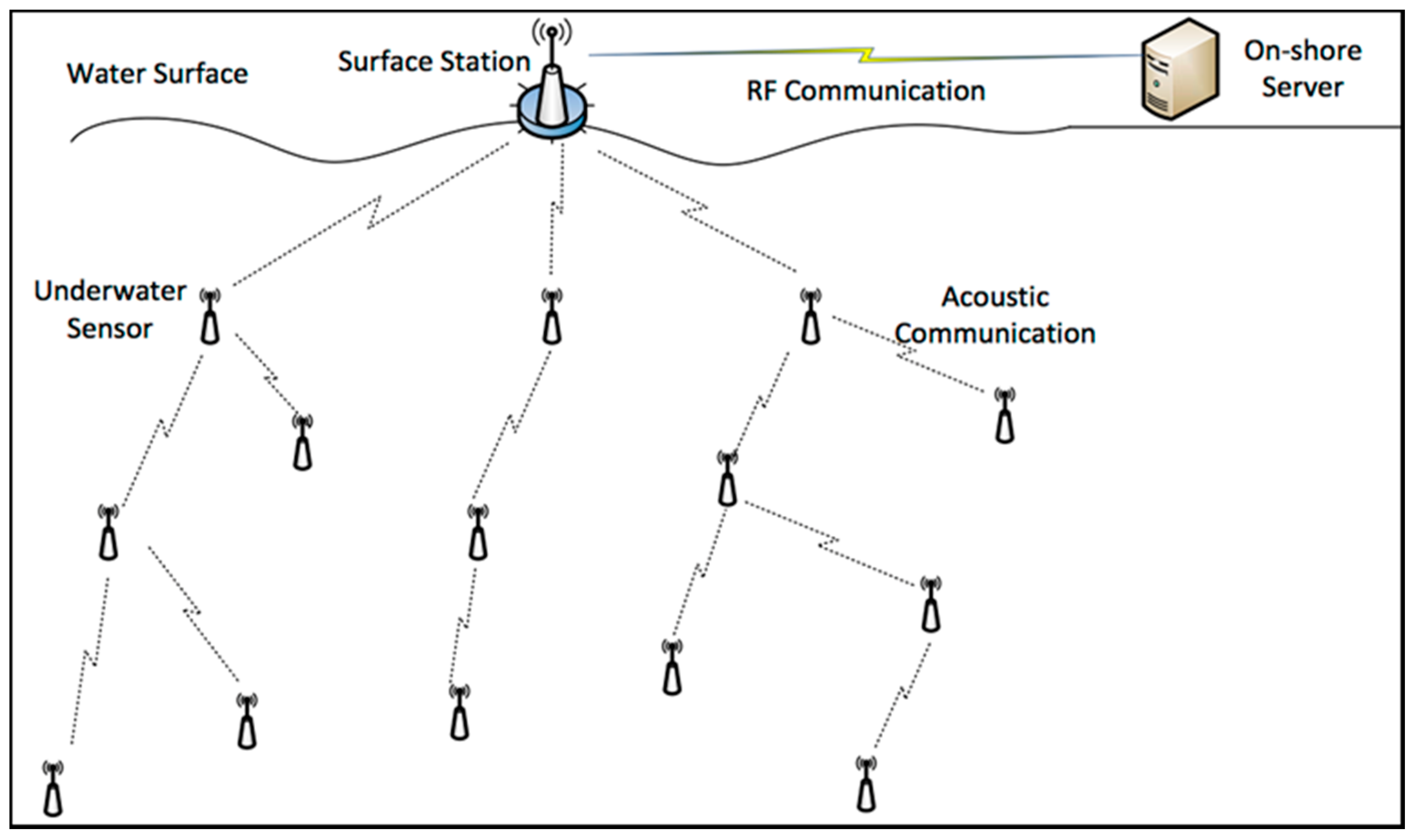
2. Underwater Acoustic Sensor Networks
- WSNs use Radio Frequency (RF) and UASNs use acoustic signals (sound waves).
- Due to the low bandwidth and using high power amplifiers to produce significant acoustic pressure, UASNs consume more energy compared to its counterpart WSNs for terrestrial environment.
- The high delay of acoustic signals is five orders of magnitude greater than that of RF in WSNs.
- Bandwidth of UASNs is limited for some certain range and depends on both frequency and distance which is contrary to the WSNs.
- UASNs suffer more from connection problems due to high BER and multipath problems compared to WSNs.
3. Cooperation in UASNs
4. Taxonomy of Cooperation in UASNs
4.1. Reputation-Based Cooperation
4.1.1. Direct Reputation (First-Hand)
4.1.2. Indirect Reputation (Second-Hand)
4.2. Price-Based Cooperation
4.3. Game Theoretic-Based Cooperation
4.3.1. Repeated Game or Decision Making-Based Games
4.3.2. Dynamic Bayesian Game
4.3.3. Evolutionary Game
4.3.4. Bargaining Game
4.3.5. Coalition Game
5. Discussion and Summary
6. Conclusions, Open Issues and Research Directions
- Reliability: This is one important aspect to have a reliable successful forwarding and delivery of information among participating players of sensor node in UASNs. It is a key point that guarantees various forms of reliability such as data reliability, hop-by-hop reliability and end-to-end reliability. Cooperative game methods need to consider strategies such as information protection, packet repetition, route redundancy and maintenance, to provide reliability. This means that cooperative methods to be developed need to be extended to include reliability issues such as those mentioned at the same time of performing cooperation. Reliability guarantees a successful delivery of data between players participating in cooperative or collaborative activities. The investigation in this research found that this very important key component of cooperation is missing in most of the current literature in UASNs, and therefore, it is required to come up with a cooperative mechanism that will take this reliability into consideration.
- Efficiency: Efficiency is strongly required in a communication network to provide an efficient cooperative method and to facilitate cooperation among players. Based on our investigation of the current work, it has been found that there is no scheme, method, approach, or mechanism which takes into account this aspect. Cooperative or collaborative monitoring activities require an efficient mechanism for a successful packet forwarding and delivery in UASNs. Efficiency needs also to be included in cooperative game techniques to use resources that ensure an efficient delivery of information, if not, then the cost of such information delivery will increase, i.e., delays, throughput, integrity of information, etc. The cooperative game methods used that integrate reliability and efficiency, can establish a base on which a quality of service (QoS) model for UASN can be built.
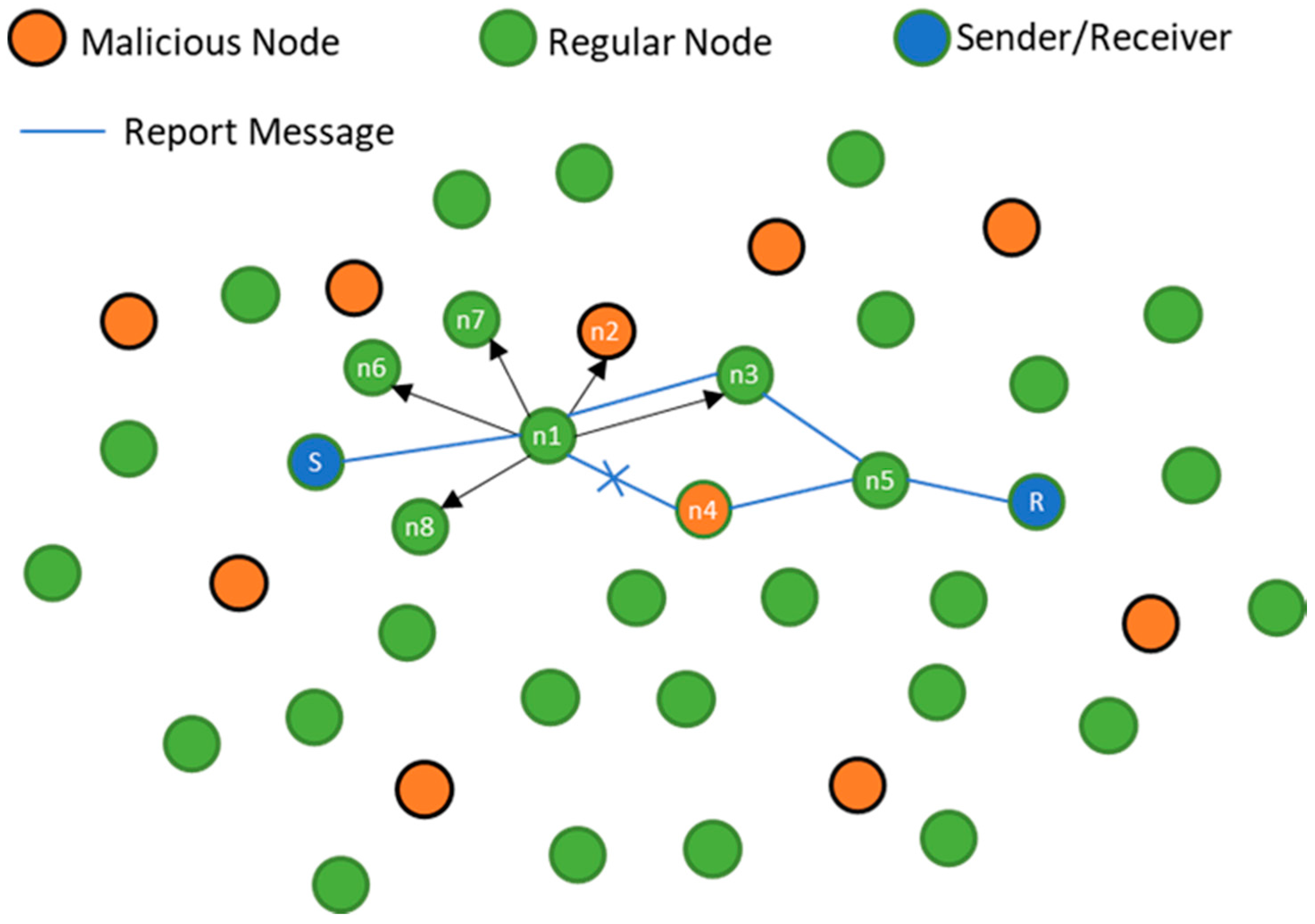
- Motivation: Since misbehaving (malicious/selfish) that would try to damage, attack, and compromise or degrade the performance of the system nodes might be present in the network, a motivation mechanism is needed to influence and change the behavior of such nodes. Motivation is a way to make nodes react to conditions in order to get more cooperation or to improve network performance. Games have always motivated people based on competition, hence, such motivation can be included so that sensors participate in more cooperative actions for the improvement of network performance. Motivation is very important in cooperative forwarding activities, and providing motivation to misbehaving nodes in UASNs becomes necessary to ensure a successful delivery of data packets among the participating players. These motivations will improve the cooperative performance of regular and misbehaving nodes which will result in improvements in the cooperative packet forwarding processes in UASNs.
- End-to-End authentication: End-to-End authentication can provide security to the packet forwarding process among participating nodes, and can prevent the data in the packets from being compromised by devious misbehaving nodes. Authentication is important in any network, but when cooperative games are involved, it can be achieved in several contexts. For example, it can be used to authenticate locally in a network by using only previously authenticated one-hop network nodes, but the cooperative games allow to also implement authentication from the perspective of an end-to-end connection. Cooperative games need to be modified to address this context because the process of end-to-end authentication could be accompanied at the same time by reliability (e.g., routing redundancy or delay), by efficiency (e.g., use the right resources that ensures quality) and by motivation (e.g., route competition to choose the best path), in order to deliver a solution with quality to the transmission of information in the network. Authenticating data before forwarding it to the target destination is an important aspect of cooperation that guarantees the security of information forwarding between source and destination in a communication network.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Appendix B
| Reference | [32] | [76] | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| No of prayers/No of actions | 2/2 | 2/2 | ||||||||
| Type of action | same | different | ||||||||
| SPC & RPC | and | and | ||||||||
| Strategy Profile of PBE of S & R | and | and | ||||||||
| Belief of their type Θ & message m | and | and | ||||||||
| Best Response of S & R | and | and | ||||||||
| Payoff Matrix and Nash | Senders message | Nodes type | Receivers action | S message | Nodes type | Receivers action | ||||
| Normal | malicious | cooperate | Decline | regular | malicious | cooperate | Decline | |||
| PS | PS | 1, P | −1, P − 1 | PS | PS | 1, P | −1, P − 1 | |||
| PS | SM | P, P | P, 0 | PS | SM | P, P | P, 0 | |||
| SM | PS | 1 − P, 0 | P − 1, P − 1 | SM | PS | 1 − P, 0 | P − 1, P − 1 | |||
| SM | SM | 0, 0 | −1, P-1 | SM | SM | 0, 0 | −1, P − 1 | |||
| (PS PS,C) & (SM SM,D) | (PS PS,C) & (SM SM,D) | |||||||||
Appendix C
Appendix D
Appendix E
Appendix F
References
- Jiang, Z. Underwater acoustic networks–issues and solutions. Int. J. Intell. Control Syst. 2008, 13, 152–161. [Google Scholar]
- Jha, V.; Gupta, P.; Ahuja, U. QoS Issues in Underwater Sensor Networks. Comput. Sci. Inf. Technol. 2012, 2, 45–51. [Google Scholar]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Distributed routing algorithms for underwater acoustic sensor networks. IEEE Trans. Wirel. Commun. 2010, 9, 2934–2944. [Google Scholar] [CrossRef]
- Manjula, R.; Manvi, S.S. Issues in underwater acoustic sensor networks. Int. J. Comput. Electr. Eng. 2011, 3, 101. [Google Scholar]
- IAEA. Inventory of Accidents and Losses at Sea Involving Radioactive Material; International Atomic Energy Agency: Vienna, Austria, 2001. [Google Scholar]
- Pocock, R. Nuclear marine propulsion. J. Inst. Nucl. Eng. 1980, 21, 174–179. [Google Scholar]
- Macias, E.; Suarez, A.; Chiti, F.; Sacco, A.; Fantacci, R. A hierarchical communication architecture for oceanic surveillance applications. Sensors 2011, 11, 11343–11356. [Google Scholar] [CrossRef] [PubMed]
- Han, G.; Jiang, J.; Sun, N.; Shu, L. Secure communication for underwater acoustic sensor networks. IEEE Commun. Mag. 2015, 53, 54–60. [Google Scholar] [CrossRef]
- Garcia, M.; Sendra, S.; Atenas, M.; Lloret, J. Underwater wireless ad-hoc networks: A survey. In Mobile Ad Hoc Networks: Current Status and Future Trends; CRC Press: Boca Raton, FL, USA, 2011; pp. 379–411. [Google Scholar]
- Jin, X.; Chen, Y.; Xu, X. The analysis of hops for multi-hop cooperation in Underwater Acoustic Sensor Networks. In Proceedings of the 2016 IEEE/OES China Ocean Acoustics (COA), Harbin, China, 9–11 January 2016; pp. 1–5. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Three-dimensional and two-dimensional deployment analysis for underwater acoustic sensor networks. Ad Hoc Netw. 2009, 7, 778–790. [Google Scholar] [CrossRef]
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 34–43. [Google Scholar] [CrossRef]
- Carbonelli, C.; Chen, S.-H.; Mitra, U. Error propagation analysis for underwater cooperative multi-hop communications. Ad Hoc Netw. 2009, 7, 759–769. [Google Scholar] [CrossRef]
- Das, A.P.; Thampi, S.M. Simulation tools for underwater sensor networks: A survey. Netw. Protoc. Algorithms 2017, 8, 41–55. [Google Scholar] [CrossRef]
- Liu, B.; Garcin, F.; Ren, F.; Lin, C. A study of forward error correction schemes for reliable transport in underwater sensor networks. In Proceedings of the 2008 5th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Francisco, CA, USA, 16–20 June 2008; pp. 197–205. [Google Scholar]
- Caiti, A.; Calabro, V.; Dini, G.; Lo Duca, A.; Munafo, A. Secure cooperation of autonomous mobile sensors using an underwater acoustic network. Sensors 2012, 12, 1967–1989. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, M.R.; Tahsien, S.M.; Aseeri, M.; Kaiser, M.S. Malicious attack detection in underwater wireless sensor network. In Proceedings of the 2015 IEEE International Conference on Telecommunications and Photonics (ICTP), Dhaka, Bangladesh, 26–28 December 2015; pp. 1–5. [Google Scholar]
- Zuba, M.; Shi, Z.; Peng, Z.; Cui, J.H.; Zhou, S. Vulnerabilities of underwater acoustic networks to denial-of-service jamming attacks. Secur. Commun. Netw. 2015, 8, 2635–2645. [Google Scholar] [CrossRef]
- Lal, C.; Petroccia, R.; Conti, M.; Alves, J. Secure underwater acoustic networks: Current and future research directions. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016; pp. 1–5. [Google Scholar]
- Liu, C.-G.; Chao, C.-H.; Leou, C.-W.; Li, J.-S. Iterative key distribution based on MAD neighborhood in underwater mobile sensor networks. Comput. J. 2012, 55, 1467–1485. [Google Scholar] [CrossRef]
- Silva, B.M.; Rodrigues, J.J.; Kumar, N.; Han, G. Cooperative strategies for challenged networks and applications: A survey. IEEE Syst. J. 2015, 11, 2749–2760. [Google Scholar] [CrossRef]
- Tariq, M.; Latiff, M.S.A.; Ayaz, M.; Coulibaly, Y.; Wahid, A. Pressure Sensor Based Reliable (PSBR) Routing Protocol for Underwater Acoustic Sensor Networks. Ad Hoc Sens. Wirel. Netw. 2016, 32, 175–196. [Google Scholar]
- Dini, G.; Lo Duca, A. A secure communication suite for underwater acoustic sensor networks. Sensors 2012, 12, 15133–15158. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Zhang, L.; Li, V.O. Asynchronous cooperative transmission for three-dimensional underwater acoustic networks. IET Commun. 2013, 7, 286–294. [Google Scholar] [CrossRef]
- Lee, J.W.; Cheon, J.Y.; Cho, H.-S. A Cooperative ARQ Scheme in Underwater Acoustic Sensor Networks. In Proceedings of the OCEANS 2010 IEEE-Sydney, Sydney, Australia, 24–27 May 2010; pp. 1–5. [Google Scholar]
- Han, J.-W.; Ju, H.-J.; Kim, K.-M.; Chun, S.-Y.; Dho, K.-C. A study on the cooperative diversity technique with amplify and forward for underwater wireless communication. In Proceedings of the OCEANS 2008-MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 1–3. [Google Scholar]
- Garcin, F.; Manshaei, M.H.; Hubaux, J.-P. Cooperation in Underwater Sensor Networks. In Proceedings of the 2009 International Conference on Game Theory for Networks, Istanbul, Turkey, 13–15 May 2009; pp. 540–548. [Google Scholar]
- Carbonelli, C.; Mitra, U. Cooperative multihop communication for underwater acoustic networks. In Proceedings of the 1st ACM international workshop on Underwater Networks, Los Angeles, CA, USA, 25 September 2006; pp. 97–100. [Google Scholar]
- Tan, X.; Li, J. Cooperative positioning in underwater sensor networks. IEEE Trans. Signal Process. 2010, 58, 5860–5871. [Google Scholar] [CrossRef]
- Eickstedt, D.P.; Benjamin, M.R. Cooperative target tracking in a distributed autonomous sensor network. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar]
- Kaliappan, M.; Paramasivan, B. Enhancing secure routing in mobile ad hoc networks using a dynamic bayesian signalling game model. Comput. Electr. Eng. 2015, 41, 301–313. [Google Scholar] [CrossRef]
- Li, F.; Yang, Y.; Wu, J. Attack and flee: Game-theory-based analysis on interactions among nodes in MANETs. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2010, 40, 612–622. [Google Scholar]
- Manshaei, M.H.; Zhu, Q.; Alpcan, T.; Bacşar, T.; Hubaux, J.-P. Game theory meets network security and privacy. ACM Comput. Surv. (CSUR) 2013, 45, 25. [Google Scholar] [CrossRef]
- Souza, E.; Wong, H.C.; Cunha, I.; Loureiro, A.A.; Vieira, L.F.M.; Oliveira, L.B. End-to-end authentication in under-water sensor networks. In Proceedings of the 2013 IEEE Symposium on Computers and Communications (ISCC), Split, Croatia, 7–10 July 2013; pp. 000299–000304. [Google Scholar]
- Senel, F.; Akkaya, K.; Erol-Kantarci, M.; Yilmaz, T. Self-deployment of mobile underwater acoustic sensor networks for maximized coverage and guaranteed connectivity. Ad Hoc Netw. 2015, 34, 170–183. [Google Scholar] [CrossRef]
- Chen, Y.; Sun, H.; Wan, L.; Wang, Z.; Zhou, S.; Xu, X. Dynamic network coded cooperative OFDM for underwater data collection. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–4. [Google Scholar]
- Van Nguyen, T.; Jeong, Y.; Shin, H.; Win, M.Z. Least square cooperative localization. IEEE Trans. Veh. Technol. 2015, 64, 1318–1330. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, X.; Xu, X. Mobile data collection paths for node cooperative underwater acoustic sensor networks. In Proceedings of the OCEANS 2016-Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–5. [Google Scholar]
- Han, Z.; Sun, Y.L.; Shi, H. Cooperative transmission for underwater acoustic communications. In Proceedings of the 2008 IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; pp. 2028–2032. [Google Scholar]
- Zhou, Z.; Cui, J.-H. Energy efficient multi-path communication for time-critical applications in underwater sensor networks. In Proceedings of the 9th ACM international symposium on Mobile ad hoc networking and computing, Hong Kong, China, 26–30 May 2008; pp. 221–230. [Google Scholar]
- Zhou, Z.; Zhou, S.; Cui, S.; Cui, J.-H. Energy-efficient cooperative communication in a clustered wireless sensor network. IEEE Trans. Veh. Technol. 2008, 57, 3618–3628. [Google Scholar] [CrossRef]
- Luo, L.; Cao, Q.; Huang, C.; Abdelzaher, T.; Stankovic, J.A.; Ward, M. Enviromic: Towards cooperative storage and retrieval in audio sensor networks. In Proceedings of the 27th International Conference on Distributed Computing Systems, Toronto, ON, Canada, 25–27 June 2007; p. 34. [Google Scholar]
- Luo, L.; Huang, C.; Abdelzaher, T.; Stankovic, J. Envirostore: A cooperative storage system for disconnected operation in sensor networks. In Proceedings of the IEEE INFOCOM 2007—26th IEEE International Conference on Computer Communications 2007, Barcelona, Spain, 6–12 May 2007; pp. 1802–1810. [Google Scholar]
- Dunbabin, M.; Corke, P.; Vasilescu, I.; Rus, D. Experiments with cooperative control of underwater robots. Int. J. Robot. Res. 2009, 28, 815–833. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Xu, Y.; Wang, F. Localization algorithms of underwater wireless sensor networks: A survey. Sensors 2012, 12, 2026–2061. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Liu, Y. Localization for anchor-free underwater sensor networks. Comput. Electr. Eng. 2013, 39, 1812–1821. [Google Scholar] [CrossRef]
- Lee, J.; Oh, J.C. Convergence of True Cooperations in Bayesian Reputation Game. In Proceedings of the 2014 IEEE 13th International Conference on Trust, Security and Privacy in Computing and Communications, Beijing, China, 24–26 September 2014; pp. 487–494. [Google Scholar]
- Roy, S.; Ellis, C.; Shiva, S.; Dasgupta, D.; Shandilya, V.; Wu, Q. A survey of game theory as applied to network security. In Proceedings of the 2010 43rd Hawaii International Conference on System Sciences, Honolulu, HI, USA, 5–8 January 2010; pp. 1–10. [Google Scholar]
- Tang, C.; Li, A.; Li, X. When reputation enforces evolutionary cooperation in unreliable MANETs. IEEE Trans. Cybern. 2015, 45, 2190–2201. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wu, Y.; Ren, Y.; Feng, R.; Yu, N.; Wan, J. An evolutionary game-based trust cooperative stimulation model for large scale MANETs. Int. J. Distrib. Sens. Netw. 2013, 9, 245017. [Google Scholar] [CrossRef]
- Aldini, A. A formal framework for modeling trust and reputation in collective adaptive systems. arXiv, 2016; arXiv:1607.02232. [Google Scholar]
- Bansal, S.; Baker, M. Observation-based cooperation enforcement in ad hoc networks. arXiv, 2003; arXiv:cs/0307012. [Google Scholar]
- Balakrishnan, K.; Deng, J.; Varshney, V. TWOACK: Preventing selfishness in mobile ad hoc networks. In Proceedings of the 2005 IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 13–17 March 2005; pp. 2137–2142. [Google Scholar]
- Liu, K.; Deng, J.; Varshney, P.K.; Balakrishnan, K. An acknowledgment-based approach for the detection of routing misbehavior in MANETs. IEEE Trans. Mob. Comput. 2007, 6, 536–550. [Google Scholar] [CrossRef]
- Michiardi, P.; Molva, R. Core: A collaborative reputation mechanism to enforce node cooperation in mobile ad hoc networks. In Advanced Communications and Multimedia Security; Springer: Berlin, Germany, 2002; pp. 107–121. [Google Scholar]
- Refaei, M.T.; DaSilva, L.A.; Eltoweissy, M.; Nadeem, T. Adaptation of reputation management systems to dynamic network conditions in ad hoc networks. IEEE Trans. Comput. 2010, 59, 707–719. [Google Scholar] [CrossRef]
- Buchegger, S.; Le Boudec, J.-Y. Performance analysis of the CONFIDANT protocol. In Proceedings of the 3rd ACM International Symposium on Mobile Ad Hoc Networking & Computing, Lausanne, Switzerland, 9–11 June 2002; pp. 226–236. [Google Scholar]
- Li, Z.; Shen, H. Game-theoretic analysis of cooperation incentive strategies in mobile ad hoc networks. IEEE Trans. Mob. Comput. 2012, 11, 1287–1303. [Google Scholar] [CrossRef]
- Bogliolo, A.; Polidori, P.; Aldini, A.; Moreira, W.; Mendes, P.; Yildiz, M.; Ballester, C.; Seigneur, J.-M. Virtual currency and reputation-based cooperation incentives in user-centric networks. In Proceedings of the 2012 8th International Wireless Communications and Mobile Computing Conference (IWCMC), Limassol, Cyprus, 27–31 August 2012; pp. 895–900. [Google Scholar]
- Buttyán, L.; Hubaux, J.-P. Stimulating cooperation in self-organizing mobile ad hoc networks. Mob. Netw. Appl. 2003, 8, 579–592. [Google Scholar] [CrossRef]
- Jakobsson, M.; Hubaux, J.-P.; Buttyán, L. A micro-payment scheme encouraging collaboration in multi-hop cellular networks. In Lecture Notes in Computer Science, Proceedings of the 7th International Conference on Financial Cryptography and Data Security, Guadeloupe, French, 27–30 January 2003; Springer: Berlin/Heidelberg, Germany, 2003; pp. 15–33. [Google Scholar]
- Crowcroft, J.; Gibbens, R.; Kelly, F.; Östring, S. Modelling incentives for collaboration in mobile ad hoc networks. Perform. Eval. 2004, 57, 427–439. [Google Scholar] [CrossRef]
- Janzadeh, H.; Fayazbakhsh, K.; Dehghan, M.; Fallah, M.S. A secure credit-based cooperation stimulating mechanism for MANETs using hash chains. Future Gener. Comput. Syst. 2009, 25, 926–934. [Google Scholar] [CrossRef]
- Shen, H.; Li, Z. ARM: An account-based hierarchical reputation management system for wireless ad hoc networks. In Proceedings of the 28th International Conference on Distributed Computing Systems Workshops, Beijing, China, 17–20 June 2008; pp. 370–375. [Google Scholar]
- Sonja, B.; Boudec, J. A robust reputation system for peer-to-peer and mobile ad-hoc networks. In Proceedings of the Second Workshop on the Economics of Peer-to-Peer Systems (P2PEcon 2004), Cambridge, MA, USA, 4–5 June 2004. [Google Scholar]
- Mohammed, N.; Otrok, H.; Wang, L.; Debbabi, M.; Bhattacharya, P. A mechanism design-based multi-leader election scheme for intrusion detection in MANET. In Proceedings of the 2008 IEEE Wireless Communications and Networking Conference, Las Vegas, NV, USA, 31 March–3 April 2008; pp. 2816–2821. [Google Scholar]
- Ng, S.-K.; Seah, W.K.G. Game-theoretic model for collaborative protocols in selfish, tariff-free, multihop wireless networks. In Proceedings of the IEEE INFOCOM 2008—The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 216–220. [Google Scholar]
- Dong, Y.; Liu, P. Security considerations of underwater acoustic networks. In Proceedings of the 20th International Congress on Acoustics (ICA’10), Sydney, Australia, 23–27 August 2010; pp. 23–27. [Google Scholar]
- Rafsanjani, M.K.; Aliahmadipour, L.; Javidi, M.M. A hybrid Intrusion Detection by game theory approaches in MANET. Indian J. Sci. Technol. 2012, 5, 2123–2131. [Google Scholar]
- Li, Y.; Xu, H.; Cao, Q.; Li, Z.; Shen, S. Evolutionary game-based trust strategy adjustment among nodes in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2015, 11, 818903. [Google Scholar] [CrossRef]
- Abdalzaher, M.S.; Seddik, K.; Elsabrouty, M.; Muta, O.; Furukawa, H.; Abdel-Rahman, A. Game Theory Meets Wireless Sensor Networks Security Requirements and Threats Mitigation: A Survey. Sensors 2016, 16, 1003. [Google Scholar] [CrossRef] [PubMed]
- Martínez-Cánovas, G.; Del Val, E.; Botti, V.; Hernández, P.; Rebollo, M. A formal model based on game theory for the analysis of cooperation in distributed service discovery. Inf. Sci. 2016, 326, 59–70. [Google Scholar] [CrossRef]
- Jiang, A.X.; Yin, Z.; Zhang, C.; Tambe, M.; Kraus, S. Game-theoretic randomization for security patrolling with dynamic execution uncertainty. In International Foundation for Autonomous Agents and Multiagent Systems, Proceedings of the 2013 International Conference on Autonomous Agents and Multi-Agent Systems, St. Paul, MN, USA, 6–10 May 2013; ACM: New York, NY, USA; pp. 207–214.
- Hollinger, G.A.; Choudhary, S.; Qarabaqi, P.; Murphy, C.; Mitra, U.; Sukhatme, G.S.; Stojanovic, M.; Singh, H.; Hover, F. Underwater data collection using robotic sensor networks. IEEE J. Sel. Areas Commun. 2012, 30, 899–911. [Google Scholar] [CrossRef]
- Paramasivan, B.; Prakash, M.J.V.; Kaliappan, M. Development of a secure routing protocol using game theory model in mobile ad hoc networks. J. Commun. Netw. 2015, 17, 75–83. [Google Scholar] [CrossRef]
- He, D.; Chen, C.; Chan, S.; Bu, J. SDRP: A secure and distributed reprogramming protocol for wireless sensor networks. IEEE Trans. Ind. Electron. 2012, 59, 4155–4163. [Google Scholar] [CrossRef]
- Nurmi, P. Modelling routing in wireless ad hoc networks with dynamic Bayesian games. In Proceedings of the 2004 IEEE SECON First Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks, Santa Clara, CA, USA, 4–7 October 2004; pp. 63–70. [Google Scholar]
- Ayday, E.; Fekri, F. A protocol for data availability in Mobile Ad-Hoc Networks in the presence of insider attacks. Ad Hoc Netw. 2010, 8, 181–192. [Google Scholar] [CrossRef]
- Jiang, J.; Han, G.; Shu, L.; Chan, S.; Wang, K. A Trust Model based on Cloud Theory in Underwater Acoustic Sensor Networks. IEEE Trans. Ind. Inform. 2015, 13, 342–350. [Google Scholar] [CrossRef]
- Jin, X.; Pissinou, N.; Pumpichet, S.; Kamhoua, C.A.; Kwiat, K. Modeling cooperative, selfish and malicious behaviors for trajectory privacy preservation using bayesian game theory. In Proceedings of the 2013 IEEE 38th Conference on Local Computer Networks (LCN), Sydney, Australia, 21–24 October 2013; pp. 835–842. [Google Scholar]
- Musacchio, J.; Walrand, J. WiFi access point pricing as a dynamic game. IEEE/ACM Trans. Netw. (TON) 2006, 14, 289–301. [Google Scholar] [CrossRef]
- Anh, H.T.; Moniz Pereira, L.; Santos, F.C. Intention recognition promotes the emergence of cooperation. Adapt. Behav. 2011, 19, 264–279. [Google Scholar]
- Shen, S.; Huang, L.; Fan, E.; Hu, K.; Liu, J.; Cao, Q. Trust dynamics in WSNs: An evolutionary game-theoretic approach. J. Sens. 2016, 2016, 4254701. [Google Scholar] [CrossRef]
- Li, Z.; Bi, J. An adaptive trusted request and authorization model for mobile peer-to-peer networks. In Proceedings of the 2013 IEEE 10th International Conference on High Performance Computing and Communications & 2013 IEEE International Conference on Embedded and Ubiquitous Computing, Zhangjiajie, China, 13–15 November 2013; pp. 1274–1280. [Google Scholar]
- Wang, W.; Chatterjee, M.; Kwiat, K. Cooperation in wireless networks with unreliable channels. IEEE Trans. Commun. 2011, 59, 2808–2817. [Google Scholar] [CrossRef]
- Seredynski, M.; Bouvry, P. Analysing the development of cooperation in MANETs using evolutionary game theory. J. Supercomput. 2013, 63, 854–870. [Google Scholar] [CrossRef]
- Han, Z. Game Theory in Wireless and Communication Networks: Theory, Models, and Applications; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Yunchuan, G.; Lihua, Y.; Licai, L.; Binxing, F. Utility-based cooperative decision in cooperative authentication. In Proceedings of the IEEE INFOCOM 2014—IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 1006–1014. [Google Scholar]
- Pal, R.; Gupta, B.; Cianca, E.; Patel, A.; Kaligotla, S.; Gogar, A.; Wardana, S.; Lam, V.T.; Ganguly, B. Playing ‘games’ with human health the role of game theory in optimizing reliability in wireless health networks. In Proceedings of the 2010 3rd International Symposium on Applied Sciences in Biomedical and Communication Technologies (ISABEL), Roma, Italy, 7–10 November 2010; pp. 1–5. [Google Scholar]
- Saad, W.; Han, Z.; Debbah, M.; Hjorungnes, A.; Basar, T. Coalitional game theory for communication networks. IEEE Signal Process. Mag. 2009, 26, 77–97. [Google Scholar] [CrossRef] [Green Version]
- Khayatian, H.; Saadat, R.; Mirjalily, G. Distributed power allocation based on coalitional and noncooperative games for wireless networks. In Proceedings of the 2010 5th International Symposium on Telecommunications (IST), Tehran, Iran, 4–6 December 2010; pp. 367–372. [Google Scholar]
- Akkarajitsakul, K.; Hossain, E.; Niyato, D.; Kim, D.I. Game theoretic approaches for multiple access in wireless networks: A survey. IEEE Commun. Surv. Tutor. 2011, 13, 372–395. [Google Scholar] [CrossRef]





| Comparison Parameters | WSNs | UASNs |
|---|---|---|
| Communication Method | Radio Frequency (RF) | Acoustic Signal (Sound waves) |
| Energy Consumption | Low | High (due to energy cost of submitting packets) |
| Propagation Delay | Low | High (five orders of magnitude greater than WSNs) |
| Bandwidth | High | Low (depend on distance & Frequency) |
| Connectivity Lost | Low | High (due to high bit error rate) |
| Paper | Problem | Method | Contribution | Weakness |
|---|---|---|---|---|
| [50] | Problem of one hop cooperative packet forwarding due to noise a packet lost | Evolutionary game theory with dynamic strategy of cooperative | Guarantee the cooperation convergence by driving the ratio of cost-to-benefit threshold | Do not focus on any security issues and hence no mechanism for malicious node detection |
| [51] | Dynamic trust cooperative under high malicious ratio | Evolutionary game-based trust cooperative simulation model | Convergence optimal strategy which maximize payoff and trust strategy preferential | Reliability issues in the packet delivery has not been tackled |
| [59] | Analysis of cooperative incentives | Integrated system of Game theory | Detection of selfish node and Effective cooperative incentives | The security issues, attack or node that are compromised has not been addressed |
| [33] | Regular and Malicious Node Strategy Analysis | Dynamic Bayesian Signaling Game | Formulation of Bayesian game framework to study the strategy of regular and malicious node | The game does not solve multi attack collision of regular or malicious node |
| [24] | Security issues such as confidentiality and integrity in underwater | Cryptography method and Secure routing | Practical and efficient to confidentiality and integrity bin UASNs | It does not fully encourage cooperation in UASNs |
| [32] | Lack of centralized control and secure routing | Dynamic Bayesian Signaling Game | Formulate a two-player game and analyzed the Nash Equilibrium strategy | These is no any suitable mechanism for long running game to solve various attack issues |
| [72] | Preventing malicious attack and Assuring trustworthiness | Evolutionary game theoretic approach | Prevent nodes form attack and guarantee trustworthiness of data | These is no much impasses on cooperation issues |
| [70] | Consumption of resources and selfish detection | Bayesian Game Method | Performance improvement in recourse consumption and effective security | These is no motivation to cooperation enforcement |
| [71] | Trust evaluation and Trust decision issues in individual strategy adjustment | Trust Strategy based Evolutionary game model | Data retransmission after Packet lost, build a trust strategy and strategy adjustment | No trust value calculation and trust management for security basis |
| [40] | Interaction for decision making and malicious behavior of entity | Bayesian Game model with dynamic repeated type | Motivation to answer the request trustfully and promoting node to be honest & cooperative | No adequate solution to the selfish detection and therefore is not secured |
| [81] | Unknown malicious Selfish, nodes cooperative & trustworthiness | Bayesian Game theory model of TPP | Trustworthiness of unknown node evaluation and drive the equilibrium strategy of the game | TPP game is not a multi-player game and hence cannot handle multiple payoff game |
| [28] | Cooperation between different authorities to reduce energy consumption and maximize lifetime | Evolutionary game theory with reactive & non-reactive strategy | Show Cooperation can emerge underwater without incentives and highlight factors affecting cooperation and the way they affect it | Did not consider propagation in multipath & dynamic nature of underwater topology |
| [35] | Authentication problem for security issues | Digital signature scheme | Energy cost evaluation using digital signature scheme (end-to-end) authentication | Lack of cooperation mechanism among the participating node |
| [83] | Behavioral evolution interaction recognition | Bayesian network model by Repeated Prisoner’s Dilemma (PD) and evolutionary game theory | Assessing the internal dynamic trust between intention recognizers and their opponents and predict the next move of their opponents based on the past direct interaction | Intention recognition achieved high performance of cooperation in homogeneous network only |
| [21] | Illegal accessed of transmission in underwater communication | Iterative key distribution scheme with secure routing method based on the Focused Beam Routing Protocol | Reduce the redundant keys in the key distribution system and adopt the mobility model to capture the movement of sensors node floating on the sea | This scheme did not consider the impaired channel caused by path loss, noise, multi-path and fading in underwater environment |
| [48] | Centralized and distributed reputation management in massive number of entities. | Bayesian Reputation Game | They found that trust cooperation is sustained when the game is repeated and the average reputation values of the players increase over time and coverage | The approach does not focus on the security issues among nodes and hence is not reliable |
| [59] | Investigating the effectiveness of nodes cooperation incentives | Used game theory to analyse cooperative incentive by Integrated System which combine the Reputation system and Price-based system | They found that the strategies of using threshold to find the trustworthiness node in Reputation system and Price-based system can be manipulated by clever or selfish node. Integrated System achieved high performance in effectiveness of incentive | The limitation of these method is it does not provide solution to the security issues among nodes |
| [60] | Motivate to share services and resources and to avoid selfish nodes to hinder the functioning of the entire network | Virtual currency and reputation mechanism method | They exploit the willingness of member to share their resources/services in order to increase collective welfare and to extend the reach of existing infrastructures | Their scheme does not guarantee security of data, since a selfish or clever node can manipulate the threshold value |
| Paper | Energy | Delay | Routing Overhead | Packet Drop | Selfish Detection | Coverage | Security | Reliability |
|---|---|---|---|---|---|---|---|---|
| [59] | No | No | No | No | Yes | Yes | No | No |
| [24] | Yes | No | Yes | No | No | Yes | No | Yes |
| [32] | No | No | Yes | Yes | Yes | Yes | Yes | No |
| [72] | No | No | No | Yes | Yes | No | Yes | No |
| [21] | Yes | No | Yes | No | No | No | Yes | No |
| [70] | Yes | No | Yes | Yes | Yes | No | Yes | No |
| [71] | Yes | Yes | Yes | Yes | No | No | No | No |
| [48] | No | Yes | No | No | No | Yes | No | No |
| [81] | No | No | No | Yes | Yes | No | Yes | No |
| [28] | Yes | Yes | No | No | No | Yes | No | No |
| [35] | Yes | Yes | Yes | No | No | Yes | Yes | Yes |
| [83] | No | Yes | No | Yes | Yes | Yes | Yes | No |
| [60] | Yes | Yes | No | Yes | No | Yes | No | No |
| [51] | Yes | No | Yes | Yes | Yes | Yes | No | No |
| [33] | No | No | Yes | Yes | Yes | Yes | No | No |
| [40] | No | Yes | Yes | No | No | Yes | No | No |
| [50] | No | Yes | No | Yes | No | Yes | No | Yes |
| [59] | No | Yes | No | Yes | Yes | Yes | No | No |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muhammed, D.; Anisi, M.H.; Zareei, M.; Vargas-Rosales, C.; Khan, A. Game Theory-Based Cooperation for Underwater Acoustic Sensor Networks: Taxonomy, Review, Research Challenges and Directions. Sensors 2018, 18, 425. https://doi.org/10.3390/s18020425
Muhammed D, Anisi MH, Zareei M, Vargas-Rosales C, Khan A. Game Theory-Based Cooperation for Underwater Acoustic Sensor Networks: Taxonomy, Review, Research Challenges and Directions. Sensors. 2018; 18(2):425. https://doi.org/10.3390/s18020425
Chicago/Turabian StyleMuhammed, Dalhatu, Mohammad Hossein Anisi, Mahdi Zareei, Cesar Vargas-Rosales, and Anwar Khan. 2018. "Game Theory-Based Cooperation for Underwater Acoustic Sensor Networks: Taxonomy, Review, Research Challenges and Directions" Sensors 18, no. 2: 425. https://doi.org/10.3390/s18020425
APA StyleMuhammed, D., Anisi, M. H., Zareei, M., Vargas-Rosales, C., & Khan, A. (2018). Game Theory-Based Cooperation for Underwater Acoustic Sensor Networks: Taxonomy, Review, Research Challenges and Directions. Sensors, 18(2), 425. https://doi.org/10.3390/s18020425