1. Introduction
Underwater communication technology has been garnering attention owing to its potential benefits for marine monitoring. In particular, underwater vehicles, such as the autonomous underwater vehicle (AUV), are widely utilized in underwater applications [
1]. The AUV plays an important role in underwater communication owing to its exploration ability. One notable thing is that accurate position information should be given to correctly complete the scheduled missions. In other words, underwater localization is essential in the AUV development. In general, the AUV tracks its own trajectory by using relative speed and location using an inertial measurement unit (IMU). However, the estimation of the initial position depends on the localization. In addition, the accumulated IMU error should be periodically corrected via localization. However, the underwater localization is challenge due to unpredictable acoustic channel and limited network resources.
This paper focuses on the impact of medium access control (MAC) delay on the AUV localization. For the localization, the multiple anchor node (AN), which know their position, transmit a packet to the AUV which has to be localized. Here, the ANs transmit its own packet at the different times to avoid packet collision upon the MAC protocol, and thus the MAC delay occurs. In the case of the node to be localized is stationary, the MAC delay does not affect the localization performance because the node receives all the packets at the same position. However, if the node is mobile node, the receiving positions are different from packet to packet, which results in deceasing localization accuracy. The longer the MAC delay is and the faster the AUV moves, the greater the localization error becomes. Therefore, the impact of MAC delay on the AUV localization should be properly handled, but it just remains as future works in most studies [
2]. In addition, in recently proposed AUV localization, the impact of MAC delay is not mentioned at all [
3,
4,
5,
6,
7].
This paper proposes AUV localization combined with the multiple access system. The ultimate solution to decouple the localization performance from the MAC delay is to guarantee the simultaneous transmission to the ANs. The simultaneous transmission allows the ANs to transmit the packet without waiting time, and thus the MAC delay can be removed. For the the simultaneous transmission, multiple access technologies can be used. Among multiple access technologies, we adopt frequency division multiple access (FDMA) combined with hyperbolic frequency modulation (HFM) signal. The HFM is a kind of nonlinear frequency modulation scheme, and its frequency varies during the symbol duration. The good property of HFM signal, high-temporal correlation, stems from the frequency varying. Owing to the high-temporal correlation, the multiple HFM signals which arrive at the receiver at the same time can be separated using a bank of matched filter. In other words, the different ANs are able to transmit their packet simultaneously without collision [
8,
9]. Accordingly, the localization performance can be decoupled from the MAC delay.
To investigate the impact of MAC delay on the AUV localization, we define Cramer-Rao Low Bound (CRLB) of the localization algorithm. CRLB is a metric indicating the theoretical optimal performance of the estimator [
10]; consequently the CRLB definition is used to evaluate the proposed localization algorithm. In this paper, the CRLB is used to analyze the AUV localization performance, according to the length of MAC delay. The CRLB which increases as the MAC delay increase reveals that the MAC delay should be properly handled in AUV localization. After the error analysis, we introduce how to transmit the packet using the HFM signal for the localization. Although we present time of arrival (ToA)-based AUV localization in this paper, our system can be applied in all kinds of ranging techniques such as time differences of arrival (TDoA), and angle of arrival (AoA).
The rest of this paper is organized as follows.
Section 2 shows the motivation of this paper and the impact of MAC delay on the AUV localization.
Section 3 theoretically analyzes the relationship between the MAC delay and localization performance using CRLB definition.
Section 4 introduces AUV localization adopting FDMA combined with the HFM signal. The simulation results show that the MAC delay should be removed in the AUV localization, and the HFM signal is a good solution. Finally, we conclude our paper with future works.
3. Error Analysis
Regardless of the ranging technology, the MAC delay becomes error source. The most typical ranging methods are time of arrival (ToA), time difference of arrival (TDoA), and angle of arrival (AoA) [
18]. Since AoA requires special hardware, it is rarely used. Therefore, time measurement-based ranging, i.e., ToA and TDoA have been intensively studied in underwater localization literature. In this paper, ToA is selected as ranging technique to show the relationship between the MAC delay and localization accuracy. In addition, for the simplicity, it is assumed that transmissions of the ANs are scheduled by time division multiple access (TDMA) protocol.
Total
N ANs are deployed at the surface, and the position of the
ith AN is denoted by
. If the position of the AUV at time
t is denoted by
, the actual distance between the
ith AN and the AUV at time
t can be calculated as below:
The
ith AN transmits a packet recording the transmission time to the AUV, and then the distance can be estimated as below:
where
is the transmission time of the
ith AN, and
c is the propagation speed. In practical system, the distance measurement has some error due to unpredictable parameters such as variation of the propagation speed and bending of the sound ray. Here, we assume that the measurement error is only caused by the MAC delay to clarify our study.
The AUV can estimate its position after receiving the minimum number of packets required for localization. In the case of 3-
D localization, the minimum number of reference positions is four, but using the depth information measured via the pressure sensor, localization can be performed based on three reference positions. Assuming that the AUV starts the localization process after receiving
N packets from
N ANs, the time to run localization is
, and the measured distance vector is
. The distances between the AUV and the ANs can be calculated as
Finally, the position of AUV can be estimated by finding a point
satisfying the following equation.
In the practical system, the distance measurements have some errors, consequently (
4) cannot be solved in the closed-form. Finding a position of the AUV is typically classified into nonlinear least squares problem, hence this paper adopts Gauss-Newton algorithm to solve it.
In localization literature, CRLB is frequently used to evaluate the proposed system. CRLB is a theoretical lower bound on variance attainable by any unbiased estimators [
10]. CRLB can be defined with the inverse of the FIM (Fisher Information Matrix), which indicates the amount of information that can be inferred from the observations. When the measurement errors are zero-mean Gaussian distributed, the FIM, whose elements are defined as
where
is the variance vector of the uncorrelated measurement errors, i.e., it can be expressed by
Here, is the variance of distance measurement error retrieved from the ith received packet.
The error can be expressed as the difference between the actual distances and the estimated distances, i.e.,
To show the impact of the AUV’s velocity and MAC delay on the measurement errors, the velocity vector of the AUV is defined by
where each component indicates velocity with respect to the
x,
y,
z-axis respectively. Let
denote MAC delay between the
ith and (
)th transmission, and then the position receiving the
ith packet is
where,
If the minimum and maximum speed of the AUV moving in a direction is
, the lower and upper bounds of the distance measurement error are derived when the AUV’s velocity is
and
respectively, and the ranging errors are distributed within the bounds. If the AUV’s constant velocity is
v, and then the error vector is denoted by
. The mean of
presented in (
7) is
and the variance of the error vector can be expressed as below:
By calculating
with (
11), the FIM can be derived. As mentioned above, CRLB is equal to the inverse of FIM; the CRLB of the ToA-based localization is
where
means the position estimation error with respect to the
ith coordinate, i.e.,
i = 1, 2, and 3 indicates
x,
y, and
z-coordinate respectively.
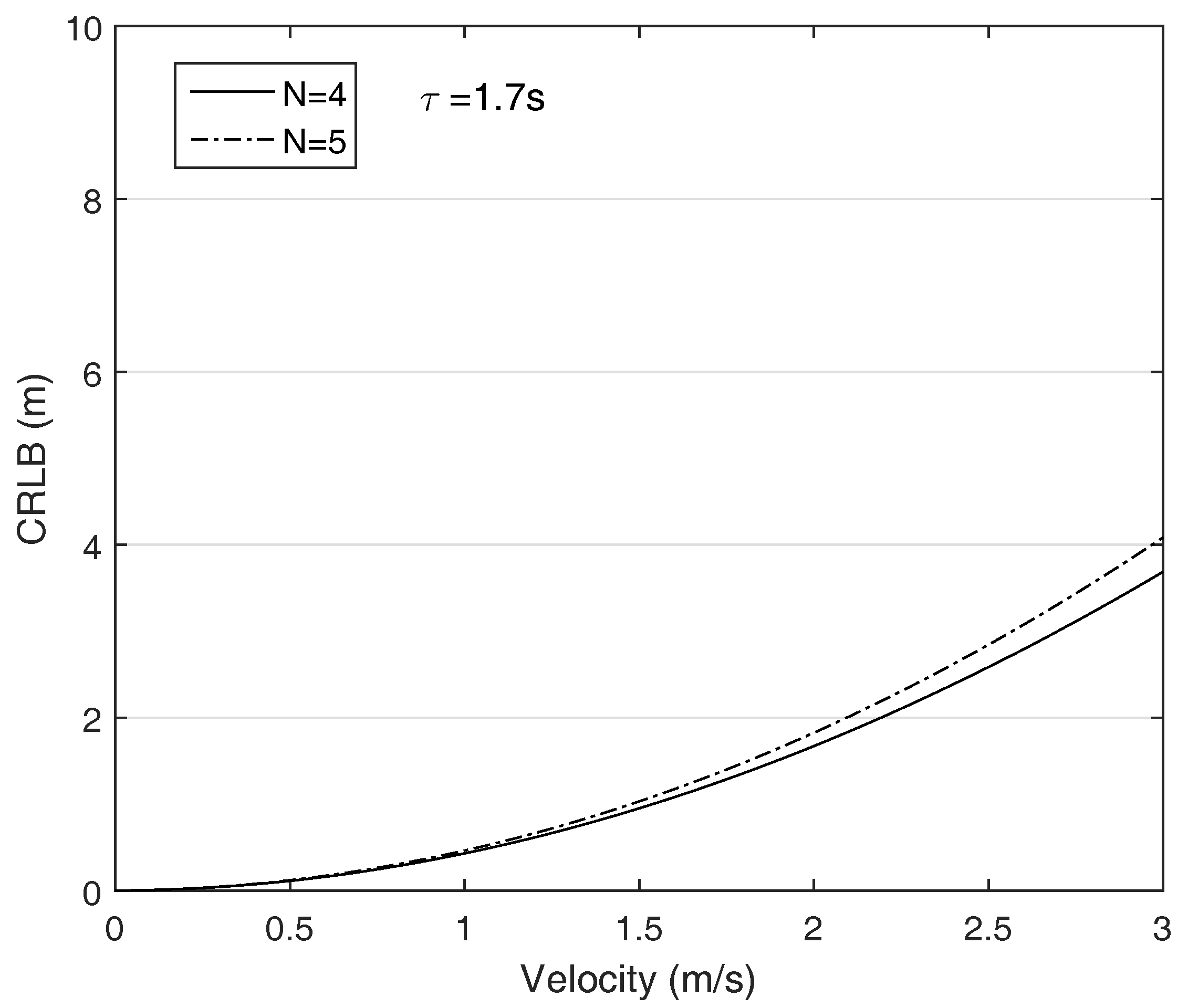
We suppose that the AUV is moving in a direction and its velocity changes from 0 to 3 m/s, i.e.,
is [0, 3] m/s. The ANs are put on the corners and the MAC delay
increases as the communication range increase.
Figure 3 plots the CRLB with respect to the AUV’s velocity. The figure reveals that the localization performance decreases as increase the AUV’s velocity. Furthermore, the longer the communication distance due to the enlarged network size is, the greater the CRLB is as shown in
Figure 4. The results suggest that the MAC delay is significant error source in AUV localization. In addition, in contrast to the general localization theory that the more the number of ANs participating on localization is, the higher the localization accuracy can be achieved, the CRLB grows as the number ANs increase because the required time to receive the all packets is proportional to the number of ANs. The results indicate that the MAC delay should be eliminated in the AUV localization.
4. HFM-Based AUV Localization
The ultimate solution to decouple localization performance from the MAC delay is to allow all ANs to transmit their packets at the same time. This is the concept of multiple access technique. The most well-known multiple access techniques are time, code and frequency division multiple access, i.e., time division multiple access (TDMA), code division multiple access (CDMA), and frequency division multiple access (FDMA). Unlike other technologies, TDMA is not allowing for several nodes to communicate simultaneously. Meanwhile, CDMA allows all the ANs to share the channel at the same time, but implementation of CDMA in underwater is challenge itself because CDMA need to set the optimal transmit power and code length [
19]. Prediction of signal attenuation, which is determined by the signal frequency and communication distance, is very difficult, especially in the mobile scenario where the distances are continuously changed. Although CDMA-based MAC protocols have been proposed, but the system performance is affected by the channel state [
20]; consequently it is difficult to apply this scheme into underwater localization requiring high reliability. Therefore, we employ FDMA technique, which supports the simultaneous transmission [
21]. Each AN uses different frequency to send a packet, and then the multiple signals can be identified in the frequency domain. One notable thing is that the used modulation has to be tolerant to the Doppler effects because the transmitted signal is strongly affected by the Doppler effect, especially in the case of communication between moving platform. For the purpose, we suggest the use of HFM signal that is the most tolerant to the Doppler effects [
22,
23]. After describing the multiple access system combined with HFM signal, the localization process is presented.
4.1. HFM Overview
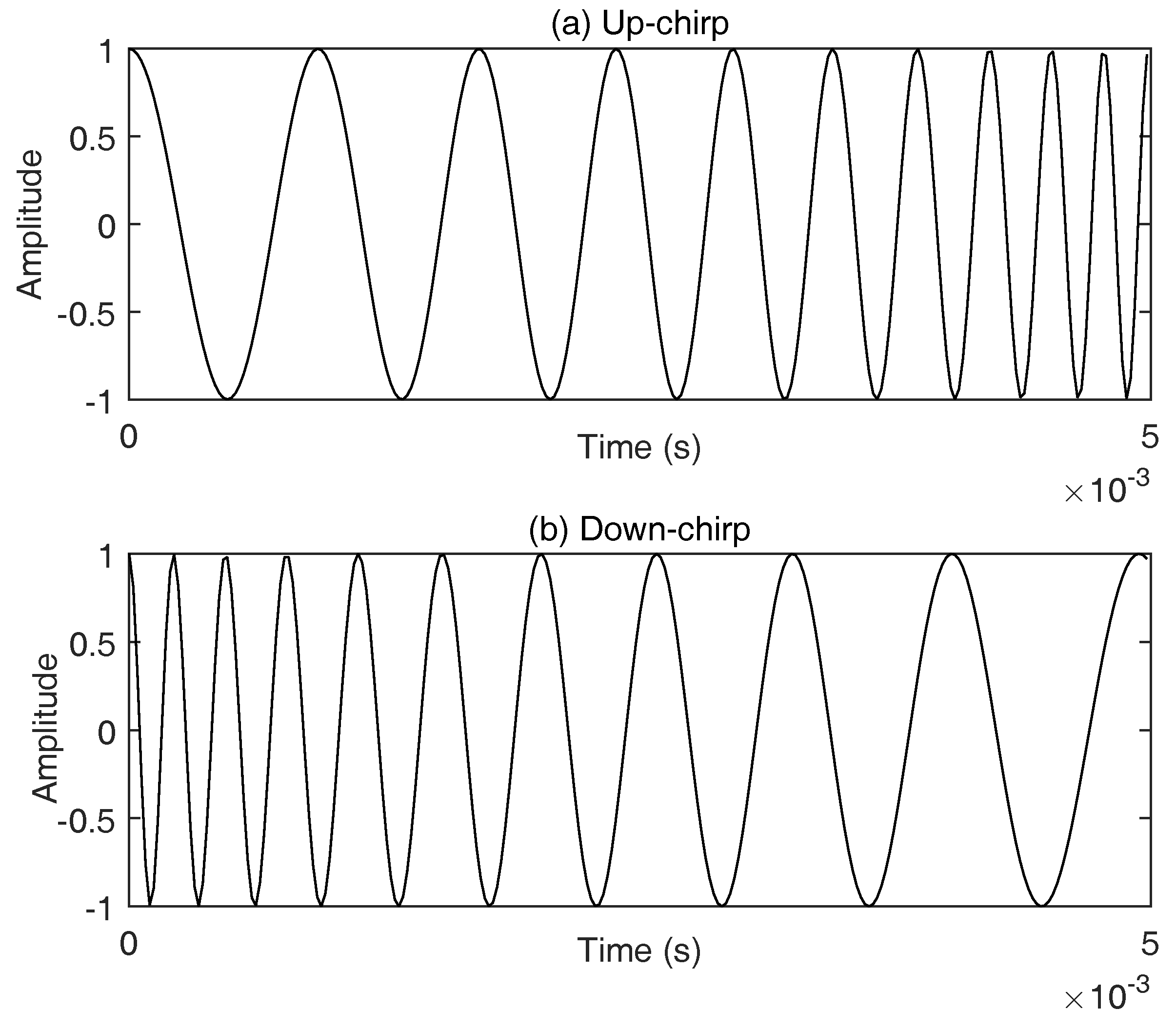
The HFM signal is a kind of chirp signal that use time-varying frequency to present a symbol. The frequency of a chirp signal either increases or decreases from the start frequency
to the end frequency
during symbol duration
T. If
, it is regarded as up-chirp used to present bit ’1’, otherwise down-chirp used to present bit ’0’. The expression of HFM signal is defined as
where,
The rate of frequency variation is determined by the chirp rate
k.
Figure 5 gives an example of chirp signal, assuming that the symbol duration is 5 ms, and the start and end frequencies are 1 kHz and 5 kHz respectively.
In chirp signal-based multiple access system, the multiple signals generated with different chirp rates can be separated even though the signals are mixed. In other words, as long as the ANs generate a HFM signal with a unique chirp rate, the simultaneous transmission can be guaranteed. As shown in (
14), the chirp rate
k is determined by
. This means that the signal generated with a given chirp rate is composed of the frequencies ranging from the start and end frequencies of the chirp. In this example, a sub-channel of which start and end frequencies are 1 and 5 kHz is allocated to a specific user. Therefore, the generation of a set of unique chirp rates may be thought as how to divide the total bandwidth into sub-channels without frequency overlap. This is comparable to the channel assignmet in FDMA, different sub channels being assigned to different users. For instance, the available bandwidth is given as [10, 20] kHz and the number of total ANs is five, and then the divided sub-channels are [10, 12], [12, 14], [14, 16], [16, 18] and [18, 20] kHz, and the low and upper frequency in each sub-channel becomes the start (
) and end (
) frequency respectively. Let
and
denote the
ith sub-bandwidth and chirp rate generated with
respectively, a set of unique chirp rates is
. The
ith chirp rate is assigned to the
ith AN, then the
ith AN uses the assigned chirp rate to generate the HFM signal for the packet transmission. This ensures the simultaneous transmission, leading to remove the MAC delay in localization. The proof of of simultaneous transmission using HFM signal is beyond the scope of this paper, so the detailed knowledge can be acquired the aforementioned references.
One notable thing in the use of HFM signal is that Doppler effect has to be considered at the receiver. Although the HFM signal is known as a Doppler-invariant signal, the demodulation of a Doppler-distorted signal has a practical problem, the shifting of matched filter outputs. To deal with this problem, the sampling time should be adjusted according to the estimated Doppler factor at the receiver. However, tracking of the Doppler effect is another research area. Instead of adjusting the sampling time, ref. [
24] proposes a simple solution that finds the peak of matched filter output not at an exact sampling time but within a certain time interval. We adopt this method in our system to correctly demodulate the a Doppler-distorted HFM signal.
4.2. Localization Process
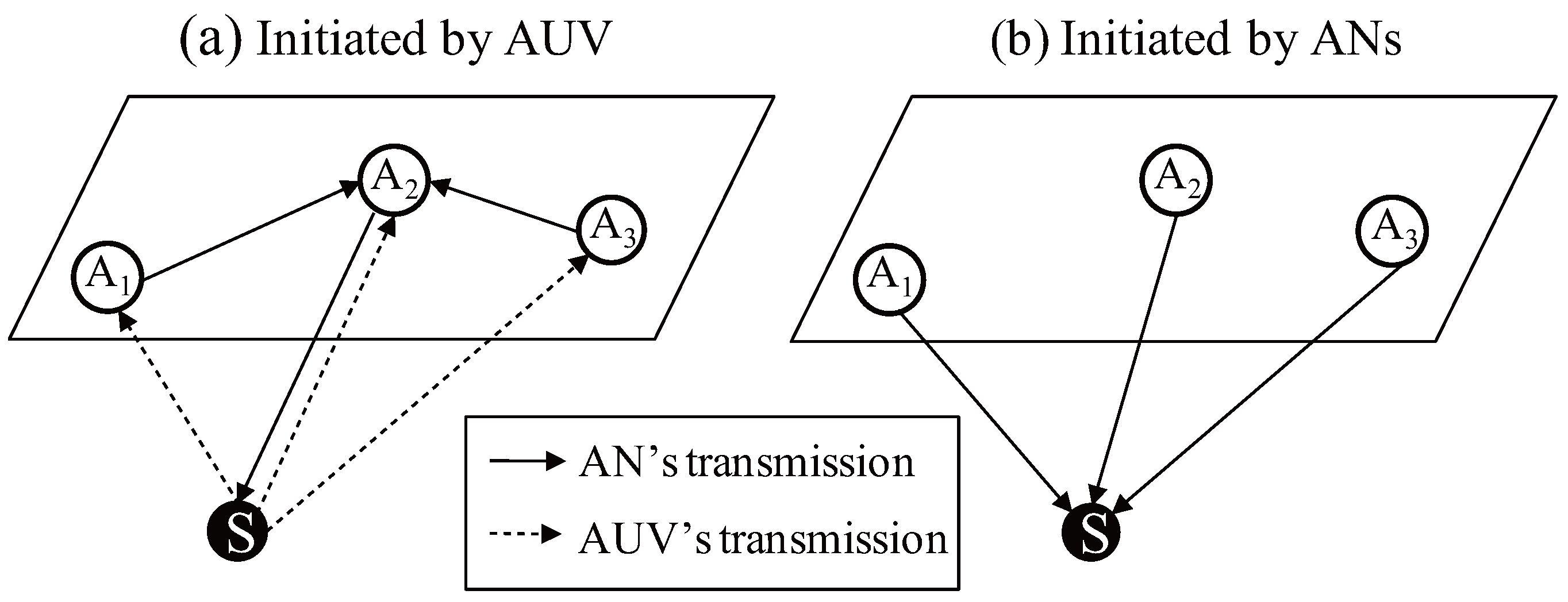
The localization process consists of three steps, chirp rate distribution, packet transmission and localization. One of ANs is selected as representative AN (R-AN). It is assumed that R-AN knows the total number of ANs in the networks. Based on the information, the R-AN divides the bandwidth into sub-channels, and then distributes them to each AN. In addition, the R-AN determines the first transmission time and the transmission period for the ranging. Based on those timing parameters, all the ANs periodically transmit their packet at the same time. At that time, each AN uses the assigned chirp rate to generate the transmission signal. The packet includes the transmission time and their position. Meanwhile, the localization should be periodically performed to relive the cumulative position error. If the number of receiving packets is more than the minimum required, the AUV estimates its current position based on the received information as illustrated in the previous section. Decoupling the localization performance from the MAC delay allows to AUV localization algorithms to use all kinds of ranging technique. In addition, the ranging initiated by the ANs’ transmission considerably enhance the spectral efficiency.
5. Simulation
The proposed system is evaluated in the two aspects, the feasibility of simultaneous transmission and localization accuracy. We demonstrate that the HFM-based multiple access system supports simultaneous transmission, even in the Doppler-channel. In addition, we prove that the MAC delay should be removed in the AUV localization to enhance the localization accuracy.
The simulation parameters used for the evaluation are as follows. The network size is 300 m for short range communication and 1500 m for long range communication respectively, and the ANs are deployed on the surface as shown in
Figure 6. The AN is supposed to be equipped with GPS, thus the time between all the ANs is automatically synchronized. The AUV can measure the depth using the pressure sensor, consequently the z-coordinate on the ranging is replaced with the measured depth. The sampling frequency used in the acoustic modem and the symbol duration of the HFM signal is set up to 44 kHz and 20 ms respectively. In addition, the total and sub-channel bandwidth is set up to [10, 30] kHz and 2 kHz respectively, thus ten unique chirp rates can be generated, which are allocated to each user. The simulation parameters are summarized in
Table 1.
5.1. Simultaneous Transmission
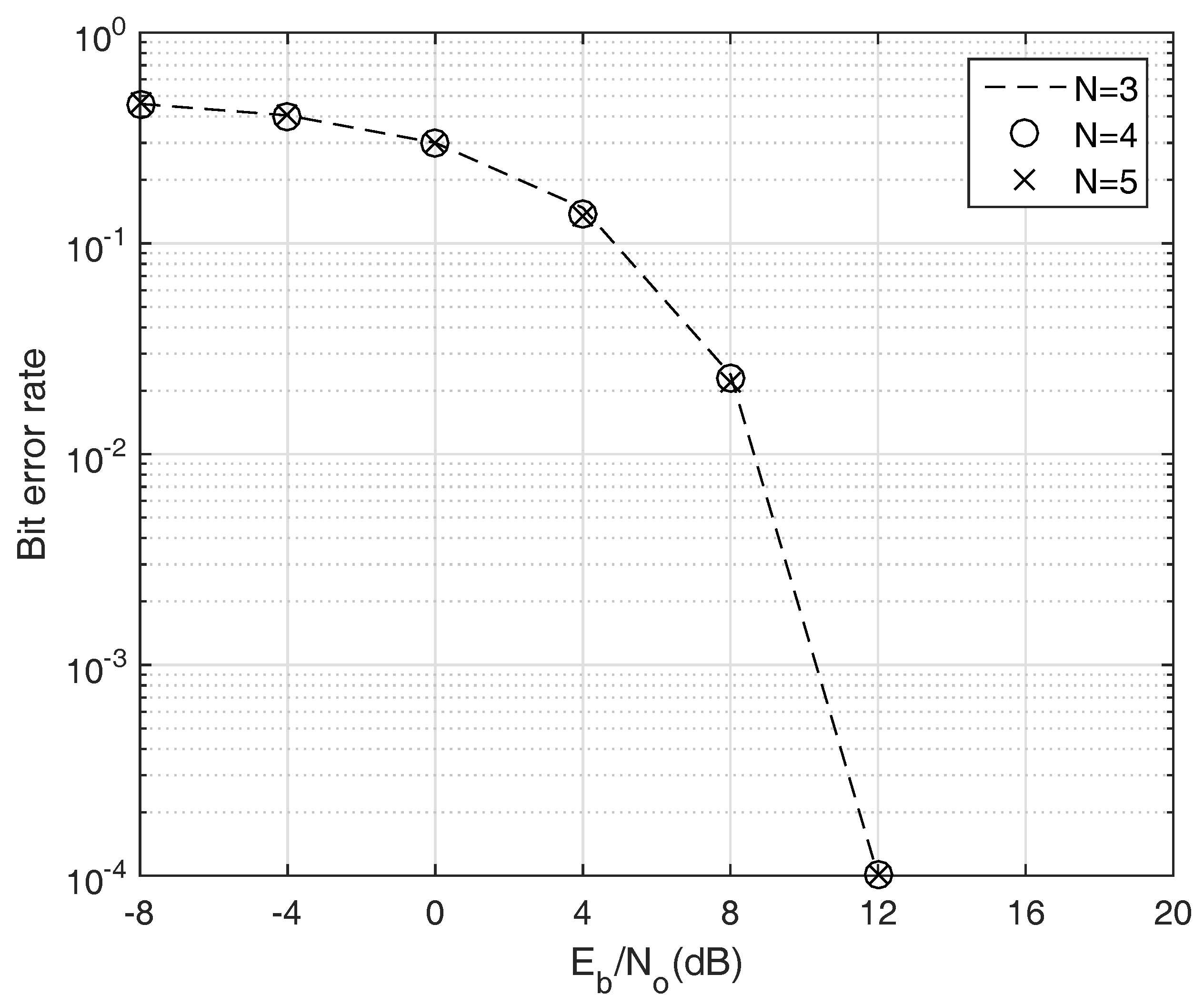
To verify the feasibility of simultaneous transmission scheme, we measure the bit error rate (BER) occurs when multiple ANs transmit their packet at the same time. For the simplicity, just direct path is considered, but this is a reasonable assumption since the horizontal communication link is dominantly used in the given network topology. In addition, the used chirp rates in each ANs participating the localization are randomly selected. Therefore, we can evaluate our system based on the unbiased usage of HFM signal. The presented BER is limited to to ignore outlier.
Figure 7 shows the BER versus the number of ANs ranging from 3 to 5. As shown in the figure, as the energy per bit (
) increase, the BER gradually decreases, and the BER becomes almost zero if the
is greater than 12 dB. It is noteworthy that the reliability of our system is preserved even though the number of participating ANs increases. Meanwhile, the acoustic communication channel is vulnerable to the Doppler effect, especially when the transmitter and receiver is mobile node. Therefore, it should be verified that the simultaneous transmission scheme is feasible in the Doppler channel. To show the Doppler tolerance of the proposed system, we distort the frequencies of transmitting signals with the Doppler factors determined by the AUV’s velocity and relative locations between the ANs and the AUV. For the simplicity, the Doppler effect caused by the surface movement is ignored. Here, the AUV’s velocity changes from 0 to 3 m/s, which is typical velocity range of the commercial AUV.
Figure 8 shows the Doppler-tolerance of the proposed transmission scheme. Owing to the good property of HFM signal, Doppler-invariance, our system is rarely affected by the Doppler effect. Although the required
to achieve the target BER slightly increases due to the imperfect matched filter design as stated in the previous section, this problem is negligible since the increment of required
is trivial.
From the presented simulation results, it is noted that the HFM-based transmission allows the multiple ANs to transmit their packet at the same time as long as the is sufficiently large. Furthermore, this can be guaranteed regardless of the number of ANs and AUV’s velocity. One simple but effective solution to grow is to increase the transmission power. In contrast to the acoustic node, the ANs which are deployed at the sea surface is able to be supplied the stable power via solar panel, consequently the constraint of power consumption is relatively loose. As a result, HFM-based signaling, which reliably supports the simultaneous transmission, is a fairly reasonable approach in AUV localization.
5.2. Localization Accuracy
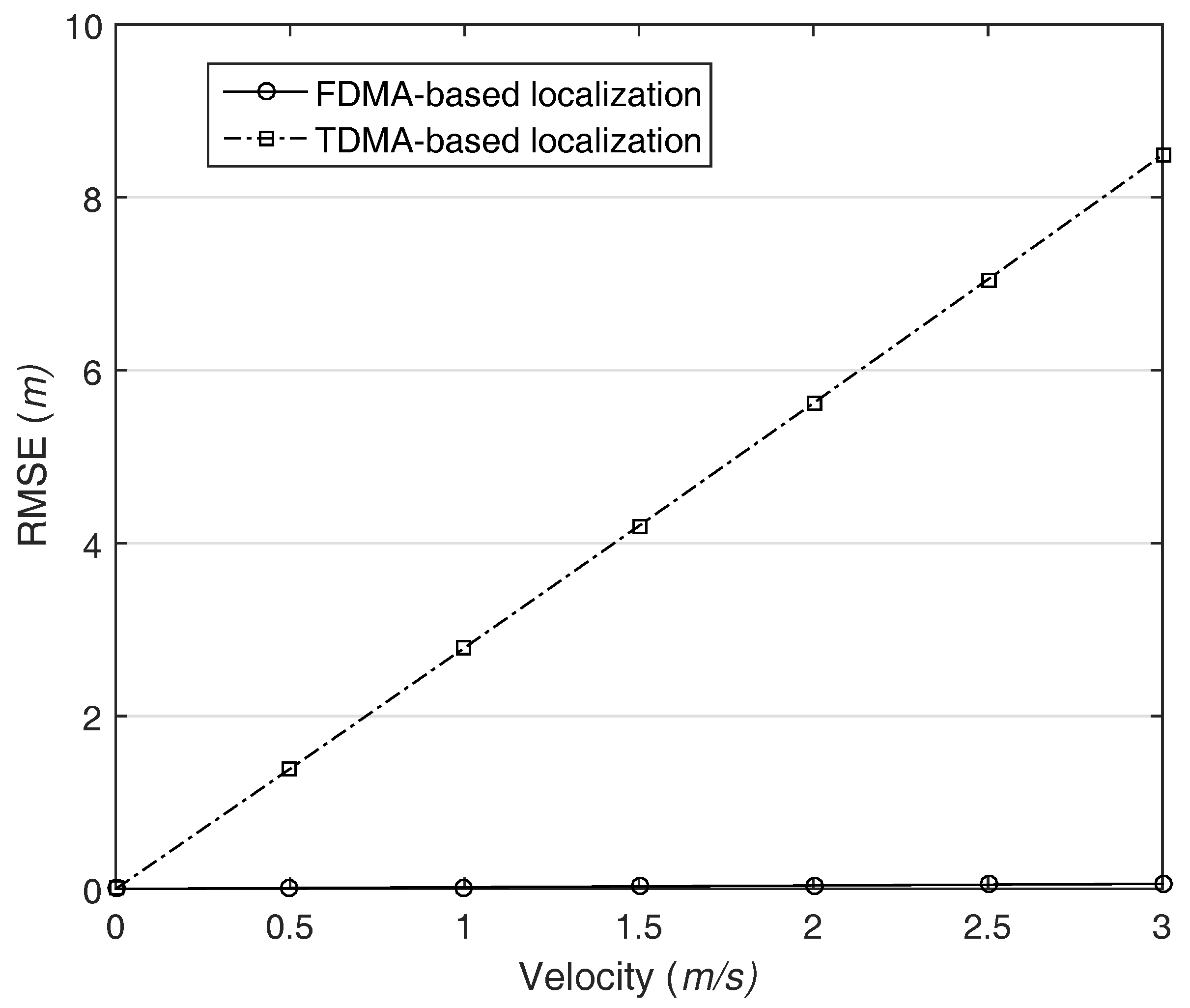
For the accuracy evaluation, we calculate the root mean square error (RMSE) of the localization. For the simplicity, AUV moves with constant velocity and the same direction during the localization process. In other words, the x-coordinate of the AUV varies with the velocity, but the other coordinates are fixed to the half of network size. To clarify the problem of MAC delay in localization, it is assumed that ranging error just occurs only due to the MAC delay unless there is specific mention. Meanwhile, the MAC delay is determined by the length of the preamble, propagation delay, and transmission delay. Among the delay sources, we ignore the transmission delay because it is relatively trivial as compared with the others. For the comparison with the existing system, we consider the RMSE of TDMA-based localization together.
Figure 9 shows the impact of MAC delay and AUV movement on the localization accuracy in a network with a size of 300 m. As shown in the figure, the higher the AUV’s velocity is, the greater the RMSE is in TDMA-based localization. In contrast, FDMA-based localization does not affected by the MAC delay; consequently, it provides the stable localization performance regardless of AUV movement. Most of localization only focuses on how to improve the ranging accuracy. Therefore, the adopted message scheme and the corresponding influence on the localization are totally ignored. However, the simulation result reveals that the MAC delay should be considered for practical system design. Furthermore, the result implies that the simultaneous transmission is obligatory condition in localization for mobile node.
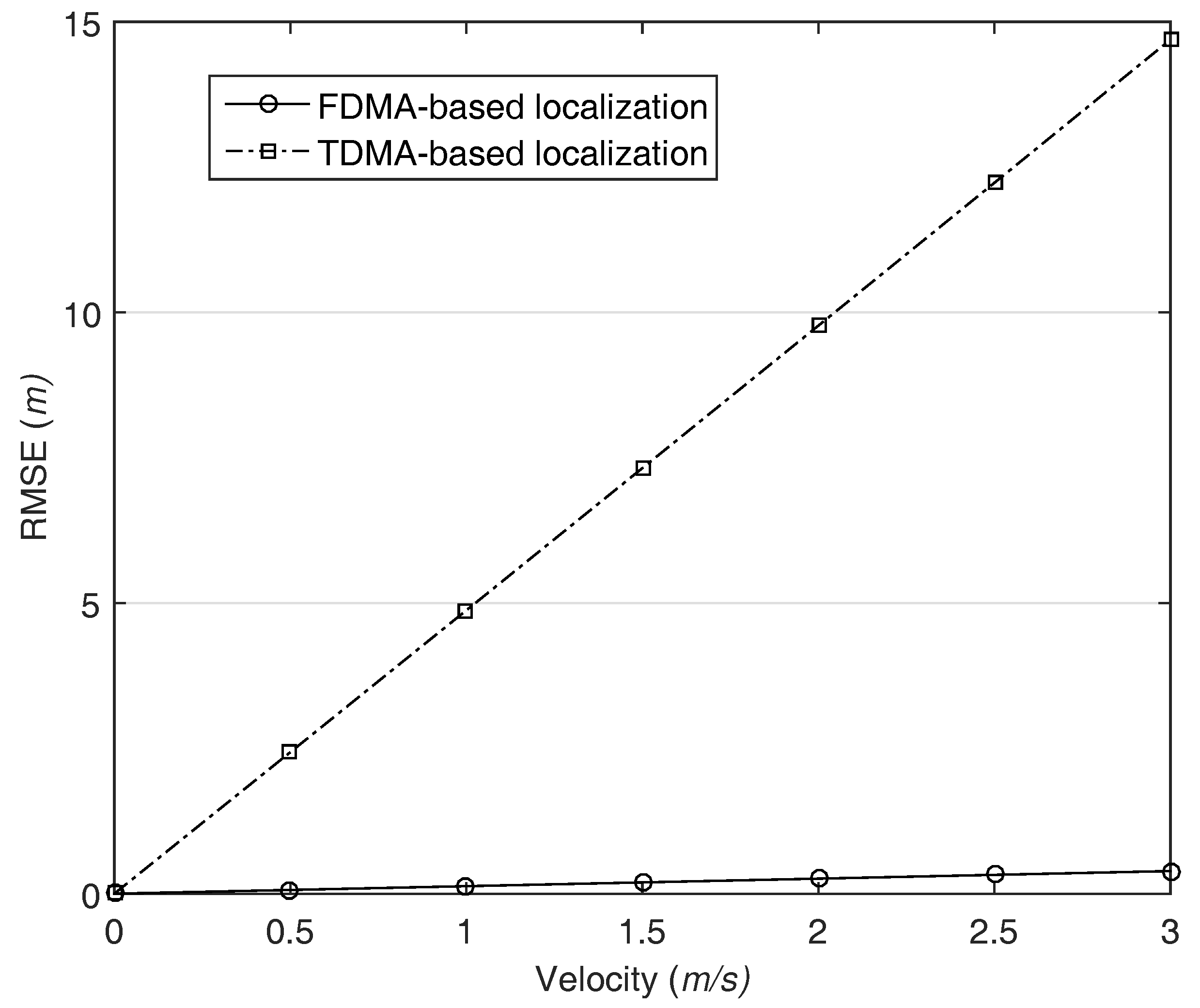
As the communication distances increase, the MAC delay grows because the propagation delay is proportional to the distance. After increasing the network size to 1500 m, we calculate the RMSE, and the result is illustrated in
Figure 10. In both cases, the localization performance decreases as compared with the former simulation conducted the small size network. One notable thing is that the proposed localization slightly affected by AUV’s velocity. This is due to the fact that the packets transmitted by each AN are arrived at the AUV with different times and the jitter acts like a MAC delay. Nevertheless, our system still provides high and stable localization accuracy.
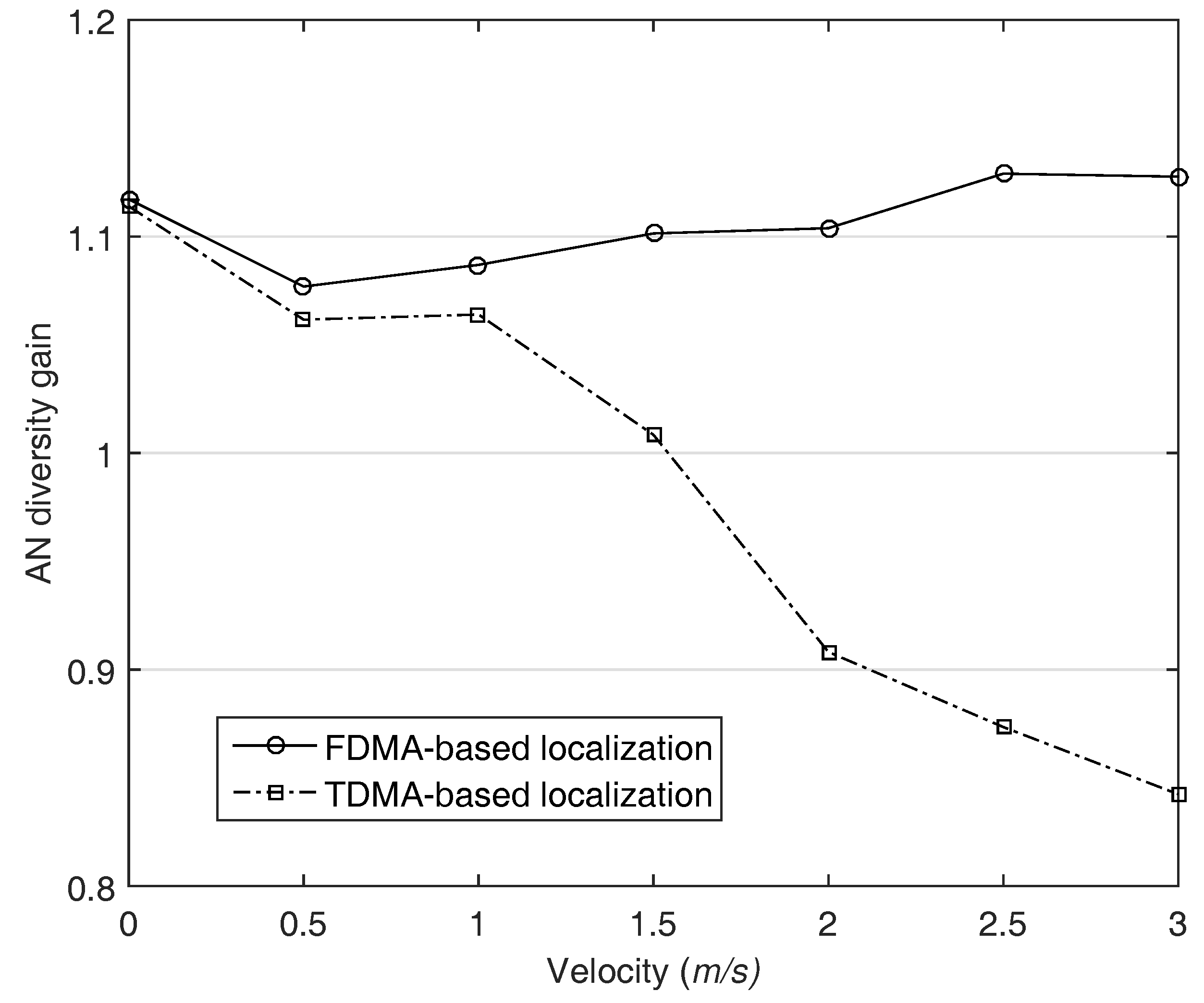
5.3. Number of Anchor Nodes
In common, the more the number of ANs participating in localization is, the better the localization performance is because the amount of information for the estimation grows. We call the benefit
. In order to verify that it can be preserved in both systems, we define a new metric, AN diversity gain
. Letting
denote the RMSE of the localization performed with a total number of
i ANs, and then
is defined as
In general, in the case of
, the gain should over 1 in the same scenario. We set
i and
j to 5 and 4 respectively, and the error ratio in the distance measurement is assumed to be 1%. As shown in
Figure 11, the diversity gain in TDMA-based localization is more than 1 when the velocity is slow. However, if the AUV’s velocity is more than about 1.5 m/s, the diversity gain becomes less than 1 and gradually decreases as the velocity of AUV increases. As the number of ANs increase, the time to run localization algorithm is more delayed, accordingly the ranging accuracy decreases. In contrast, the diversity gain is preserved in FDMA-based localization owing to the AN diversity, accordingly the localization accuracy is improved in our system. This result implies that the simultaneous transmission guarantee the AN diversity gain in AUV localization.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}