Spatial Vertical Directionality and Correlation of Low-Frequency Ambient Noise in Deep Ocean Direct-Arrival Zones

Abstract
:1. Introduction
2. Model and Spatial Characteristics of Ambient Noise Field
2.1. Methods for Modeling Ambient Noise Field
2.2. Vertical Directionality of Ambient Noise
2.3. Vertical Coherence of Ambient Noise Field
3. Numerical Results of the Simulation
3.1. Wind Speed Dependence
3.2. Frequency Dependence
4. The Experiment Results
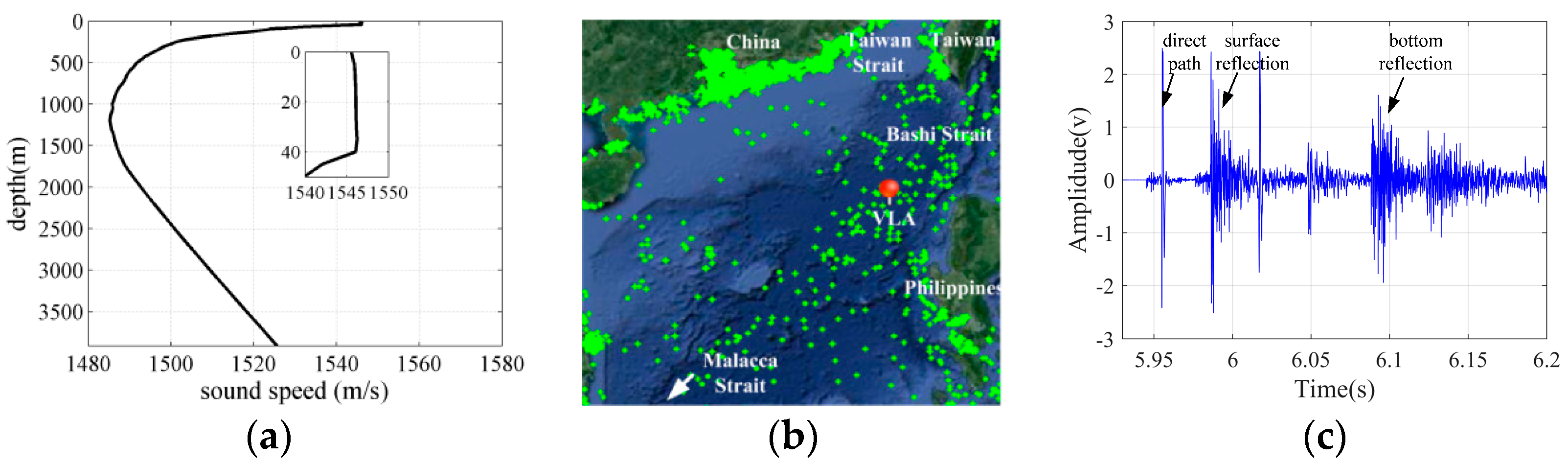
4.1. Experiment Description
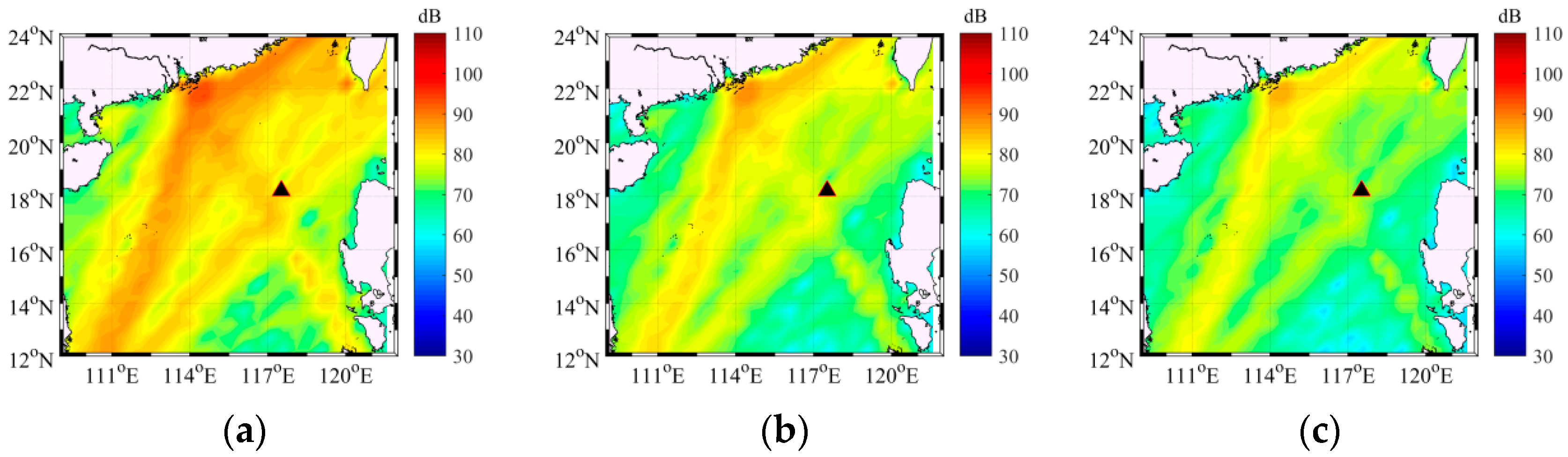
4.2. Auxiliary Database for the Modeling Noise Field
4.3. Experiment Verification
5. Conclusions
- (1)
- The wind-driven and distant shipping noise field may significantly and simultaneously influence the spatial characteristics of the total noise field. The ray approach and parabolic equation solution method were jointly utilized to model the low frequency ambient noise field in the range-dependent deep ocean environment by considering their calculation accuracy and efficiency in wind-driven and distant shipping noise fields. The NCEP and VOS reanalysis databases were used to model ambient noise source intensity and distribution.
- (2)
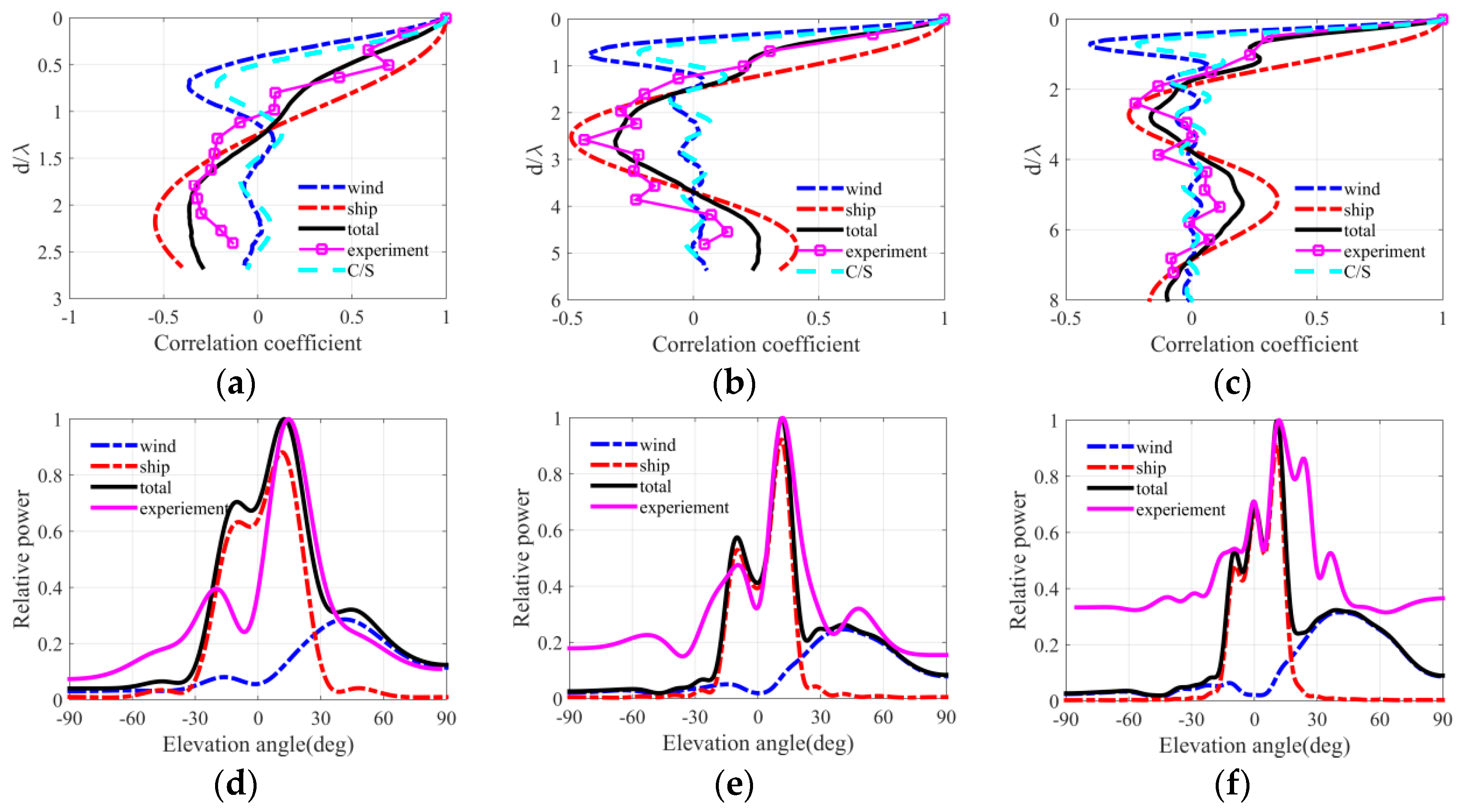
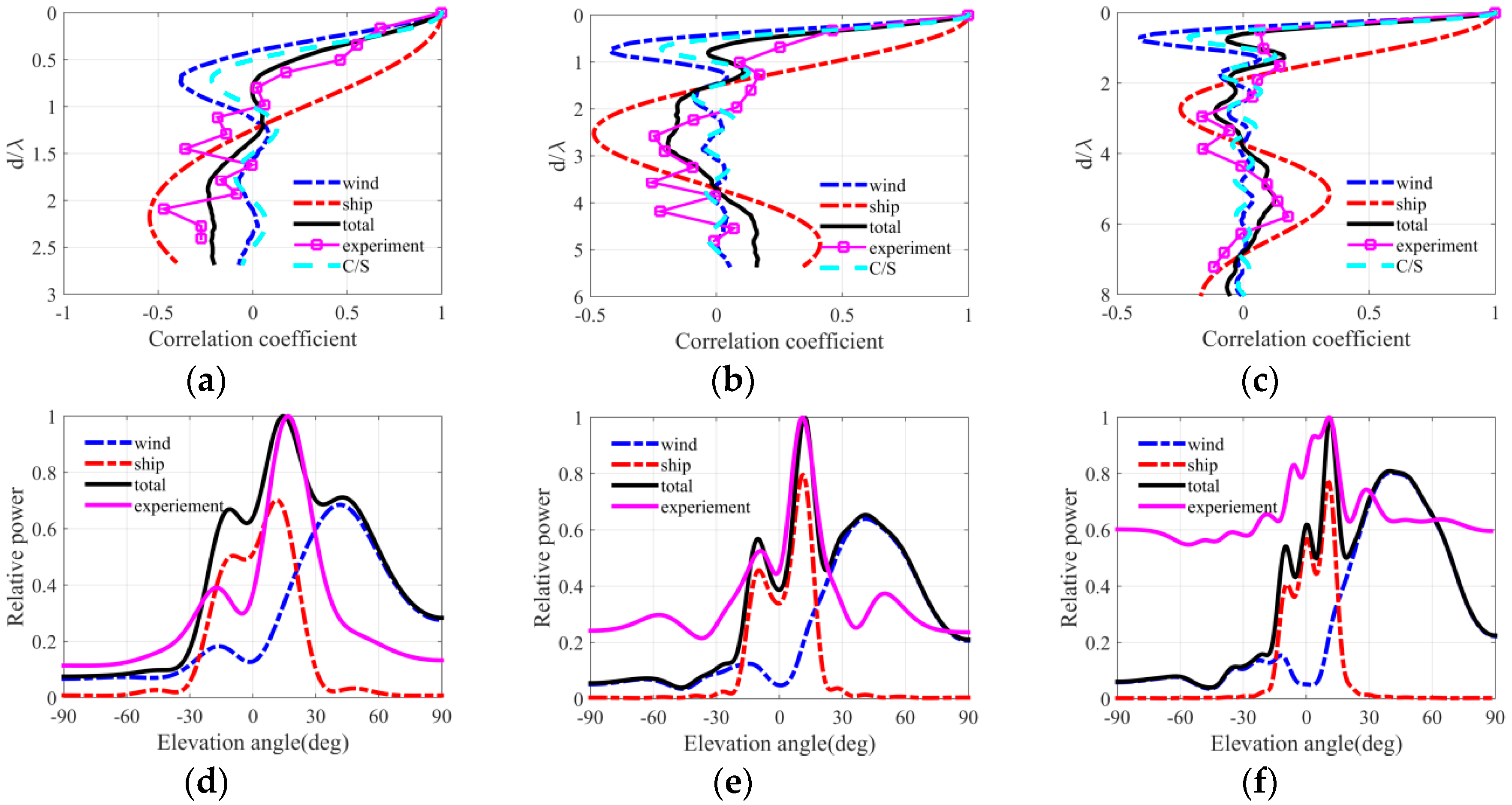
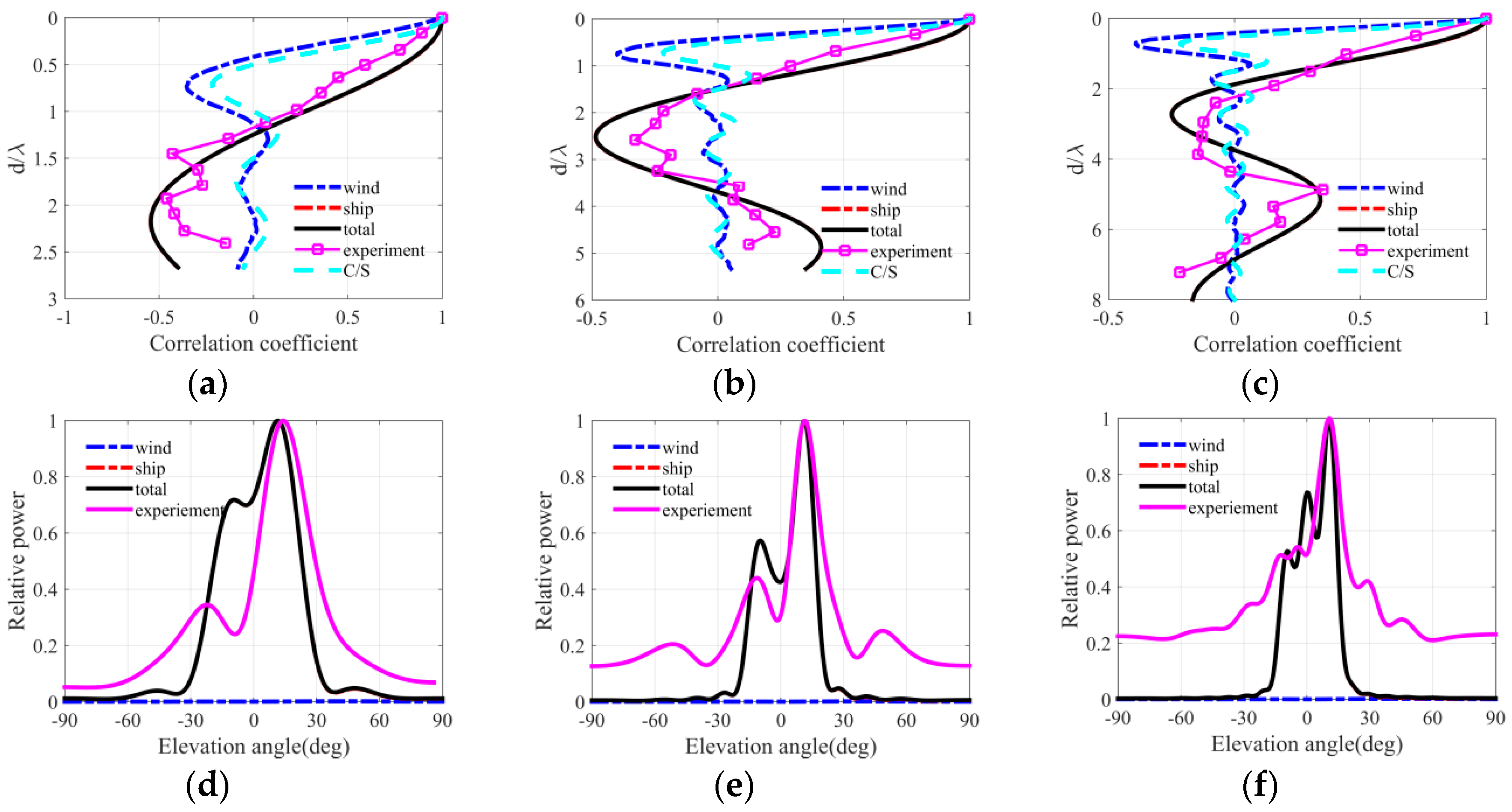
- The spatial vertical directionality and correlation of total noise field were analyzed in three scenarios that corresponded to three wind speed conditions. The total noise field was dominated by distant shipping noise when the wind speed was less than 3 m/s. The spatial vertical correlation and vertical directionality of the total noise field were approximately consistent with that of the shipping noise field; The near-field wind-generated noise source became the dominant noise source when the wind speed was larger than 12 m/s, and the spatial vertical correlation of the total noise field was approximately consistent with that of the wind-driven noise field at 150 Hz; Furthermore, the spatial correlation coefficient results were the weighted results of the wind-generated noise field and distant shipping noise fields for wind speeds between 3 and 12 m/s.
- (3)
- The vertical directionality pattern of total noise field was the hybrid result of the wind-driven and distant shipping noise fields because of their different arrival paths. The wind-generated noise sources reaching the received VLA were along the direct or reliable acoustic path with low transmission loss and steep grazing angle. By contrast, the distant shipping noises arriving at the receiver VLA were through paths of deep sound channel or convergence zone with relatively high transmission loss and shallow grazing angle. The vertical directionality of the shipping noise field exhibited a symmetrical dual-peak structure along a pair of upgoing and downgoing rays along convergence zone path.
- (4)
- The spatial correlation coefficients of the numerical results of each type of noise field were compared with those proposed by Cron/Sherman. The vertical correlation coefficient of the wind-generated noise field was nearly consistent with the C/S result. The first zero location occurred at a half wavelength when the wind generated noise sources were the dominant noise source. However, the first zeros radius was multiple times larger than a half wavelength when the total noise field was dominated by the distant shipping noise sources. The first zero location demonstrated a complex relationship with the competition of wind-driven and distant shipping noise sources in the total noise field.
- (5)
- Several factors may induce errors in modeling the noise field spatial properties. First, the VOS database may not describe the ship distribution near the VLA completely and accurately, thereby inducing errors in the vertical directionality and correlation coefficient in the simulation results of the total noise field. Second, the noise source levels of wind and distant shipping were inaccurate but were the empirical results. Third, the geoacoustic parameters may deviate from the inversion results far from the VLA position; besides, the sound speed profiles that were distant from the VLA may be inconsistent with measured result at the position of VLA.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Buckingham, M.J. Cross-correlation in band-limited ocean ambient noise fields. J. Acoust. Soc. Am. 2012, 131, 2643–2657. [Google Scholar] [CrossRef] [PubMed]
- Fried, S.E.; Walker, S.C.; Hodgkiss, W.S.; Kuperman, W.A. Measuring the effect of ambient noise directionality and split-beam processing on the convergence of the cross-correlation function. J. Acoust. Soc. Am. 2013, 134, 1824–1832. [Google Scholar] [CrossRef] [PubMed]
- Roux, P.; Sabra, K.G.; Kuperman, W.A.; Roux, A. Ambient noise cross correlation in free space: Theoretical approach. J. Acoust. Soc. Am. 2005, 117, 79–84. [Google Scholar] [CrossRef] [PubMed]
- Xia, H.J.; Yang, K.D.; Ma, Y.L. A noise removal method for uniform circular arrays in complex underwater noise environments with low SNR. Sensors 2017, 17, 1345. [Google Scholar] [CrossRef] [PubMed]
- Kuperman, W.A. Spatial correlation of surface generated noise in a stratified ocean. J. Acoust. Soc. Am. 1980, 67, 1988–1996. [Google Scholar] [CrossRef]
- Lee, K.; Seong, W. Ray-based model for spatial coherence of ocean surface generated noise and its approximation in a triplet array. J. Ocean Eng. 2017, 42, 199–207. [Google Scholar] [CrossRef]
- Buckingham, M.J. Theory of the directionality and spatial coherence of wind driven ambient noise in a deep ocean with attenuation. J. Acoust. Soc. Am. 2013, 134, 950–958. [Google Scholar] [CrossRef] [PubMed]
- Buckingham, M.J.; Carbone, N.M. Source depth and the spatial coherence of ambient noise in the ocean. J. Acoust. Soc. Am. 1997, 102, 2637–2644. [Google Scholar] [CrossRef]
- Buckingham, M.J. On the two-point cross-correlation function of anisotropic, spatially homogeneous ambient noise in the ocean and its relationship to the Green’s function. J. Acoust. Soc. Am. 2011, 129, 3562–3576. [Google Scholar] [CrossRef] [PubMed]
- Walker, S.C.; Buckingham, M.J. Spatial coherence and cross correlation of three dimensional ambient noise fields in the ocean. J. Acoust. Soc. Am. 2012, 131, 1079–1086. [Google Scholar] [CrossRef] [PubMed]
- Xiao, P.; Yang, K.D.; Lei, B. Model of shipping noise in deep water: Directional density and spatial coherence functions. China Ocean Eng. 2017, 30, 591–601. [Google Scholar] [CrossRef]
- Barclay, D.R.; Buckingham, M.J. On the spatial properties of ambient noise in the Tonga Trench including effects of bathymetric shadowing. J. Acoust. Soc. Am. 2014, 136, 2497–2511. [Google Scholar] [CrossRef] [PubMed]
- Barclay, D.R.; Buckingham, M.J. Depth dependence of wind-driven, broadband ambient noise in the Philippine Sea. J. Acoust. Soc. Am. 2013, 133, 62–71. [Google Scholar] [CrossRef] [PubMed]
- Naughton, P.; Roux, P.; Yeakle, R.; Schurgers, C.; Kastner, R.; Jaffe, J.S.; Roberts, P.L.D. Ambient noise correlations on a mobile deformable array. J. Acoust. Soc. Am. 2016, 140, 4260–4270. [Google Scholar] [CrossRef] [PubMed]
- Baggeroer, A.B.; Scheer, E.K.; Colosi, J.A.; Cornuelle, B.D.; Dushaw, B.D.; Dzieciuch, M.A.; Howe, B.M.; Mercer, J.A.; Munk, W.H.; Spindel, R.C.; et al. Statistics and vertical directionality of low-frequency ambient noise at the North Pacific Acoustic Laboratory site. J. Acoust. Soc. Am. 2007, 117, 1643–1665. [Google Scholar] [CrossRef]
- Farrokhrooz, M.; Wage, K.E.; Dziciuch, M.A.; Worcester, P.F. Vertical line array meaments of ambient noise in the North Pacific. J. Acoust. Soc. Am. 2017, 141, 1571–1581. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.Z.; Guo, X.Y.; Ma, L. The research of the characteristics of the ambient noise under varying environment. J. Comput. Acoust. 2017, 25, 1750021. [Google Scholar] [CrossRef]
- Harrison, C.H. Formulas for ambient noise level and coherence. J. Acoust. Soc. Am. 1996, 99, 2055–2066. [Google Scholar] [CrossRef]
- Carey, W.M.; Evans, R.B. Ocean Ambient Noise Measurement and Theory; AIP Press: New York, NY, USA, 2011; pp. 102–116. [Google Scholar]
- Yang, Q.L.; Yang, K.D.; Duan, S.L. A method for noise source levels inversion with underwater ambient noise generated by typhoon in Deep Ocean. J. Comput. Acoust. 2018, 26, 1850007. [Google Scholar] [CrossRef]
- Cox, H. Spatial correlation in arbitrary noise fields with application to ambient sea noise. J. Acoust. Soc. Am. 1973, 54, 1289–1301. [Google Scholar] [CrossRef]
- Cron, B.F.; Sherman, C.H. Spatial correlation functions for various noise models. J. Acoust. Soc. Am. 1961, 34, 1732–1736. [Google Scholar] [CrossRef]
- Hamson, R.M. The modeling of ambient noise due to shipping and wind sources in complex environments. Appl. Acoust. 1997, 51, 251–287. [Google Scholar] [CrossRef]
- Porter, M.B. The BELLHOP Manual and User’s Guide: Preliminary Draft; Heat, Light, and Sound Research, Inc.: La Jolla, CA, USA, 2011; Available online: http://oalib.hlsresearch.com/Rays/HLS-2010-1.pdf (accessed on 31 January 2011).
- Collins, M.D. User’s Guide for RAM Versions 1.0 and 1.0p; Naval Research Lab.: Washington, DC, USA. Available online: http://oalib.hlsresearch.com/PE/RAM/ (accessed on 3 September 2017).
- Harrison, C.H. CANARY: A simple model of ambient noise and coherence. Appl. Acoust. 1997, 51, 289–315. [Google Scholar] [CrossRef]
- Li, J.; Li, Z.L.; Ren, Y.; Li, W.; Zhang, R.H. Horizontal-longitudinal correlations of acoustic field in deep water. Chin. Phys. Lett. 2015, 32, 107–110. [Google Scholar] [CrossRef]
- Duan, R.; Yang, K.D.; Ma, Y.L. A reliable acoustic path: Physical properties and a source localization method. Chin. Phys. B 2012, 21, 276–289. [Google Scholar] [CrossRef]
- Duan, R.; Yang, K.D.; Ma, Y.L.; Yang, Q.L.; Li, H. Moving source localization with a single hydrophone using multipath time delays in the deep ocean. J. Acoust. Soc. Am. 2014, 136, EL159–EL165. [Google Scholar] [CrossRef] [PubMed]
- Lei, Z.X.; Yang, K.D.; Ma, Y.L. Passive localization in the deep ocean based on the cross-correlation function matching. J. Acoust. Soc. Am. 2016, 139, EL196–EL201. [Google Scholar] [CrossRef] [PubMed]
- Yang, K.D.; Xiao, P.; Duan, R.; Ma, Y.L. Bayesian Inversion for Geoacoustic Parameters from Ocean Bottom Reflection Loss. J. Comput. Acoust. 2017, 25, 1750019. [Google Scholar] [CrossRef]
- Dong, H.F.; Chapman, N.R.; Hannay, D.E.; Dosso, S.E. Estimation of seismic velocities of upper oceanic crust from ocean bottom reflection loss data. J. Acoust. Soc. Am. 2010, 127, 2182–2192. [Google Scholar] [CrossRef] [PubMed]
- National Center of Environment Prediction (NCEP). Available online: https://rda.ucar.edu/ (accessed on 3 September 2017).
- Porter, M.B.; Henderson, L.J. Modeling ocean noise on the global scale. In Proceedings of the INTERNOISE, Melbourne, Australia, 16–19 November 2014; pp. 1–7. [Google Scholar]
- Li, Z.; Zurk, L.M.; Ma, B. Vertical arrival structure of shipping noise in deep water channels. In Proceedings of the OCEANS 2010, Seattle, WA, USA, 20–23 September 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–8. [Google Scholar] [CrossRef]
- National Geophysical Data Center. Available online: https://www.ngdc.noaa.gov/mgg/global/global.html (accessed on 3 September 2017).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bottom | Sound Speed (m/s) | Density (g/cm3) | Attenuation (dB/λ) | Thickness (m) |
|---|---|---|---|---|
| Sediment | 1535–1545 | 1.32–1.35 | 0.15 | 0–15 |
| basement | 1560–1650 | 1.80 | 0.10 | 15–200 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Q.; Yang, K.; Cao, R.; Duan, S. Spatial Vertical Directionality and Correlation of Low-Frequency Ambient Noise in Deep Ocean Direct-Arrival Zones. Sensors 2018, 18, 319. https://doi.org/10.3390/s18020319
Yang Q, Yang K, Cao R, Duan S. Spatial Vertical Directionality and Correlation of Low-Frequency Ambient Noise in Deep Ocean Direct-Arrival Zones. Sensors. 2018; 18(2):319. https://doi.org/10.3390/s18020319
Chicago/Turabian StyleYang, Qiulong, Kunde Yang, Ran Cao, and Shunli Duan. 2018. "Spatial Vertical Directionality and Correlation of Low-Frequency Ambient Noise in Deep Ocean Direct-Arrival Zones" Sensors 18, no. 2: 319. https://doi.org/10.3390/s18020319
APA StyleYang, Q., Yang, K., Cao, R., & Duan, S. (2018). Spatial Vertical Directionality and Correlation of Low-Frequency Ambient Noise in Deep Ocean Direct-Arrival Zones. Sensors, 18(2), 319. https://doi.org/10.3390/s18020319