Speed Bump Detection Using Accelerometric Features: A Genetic Algorithm Approach

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
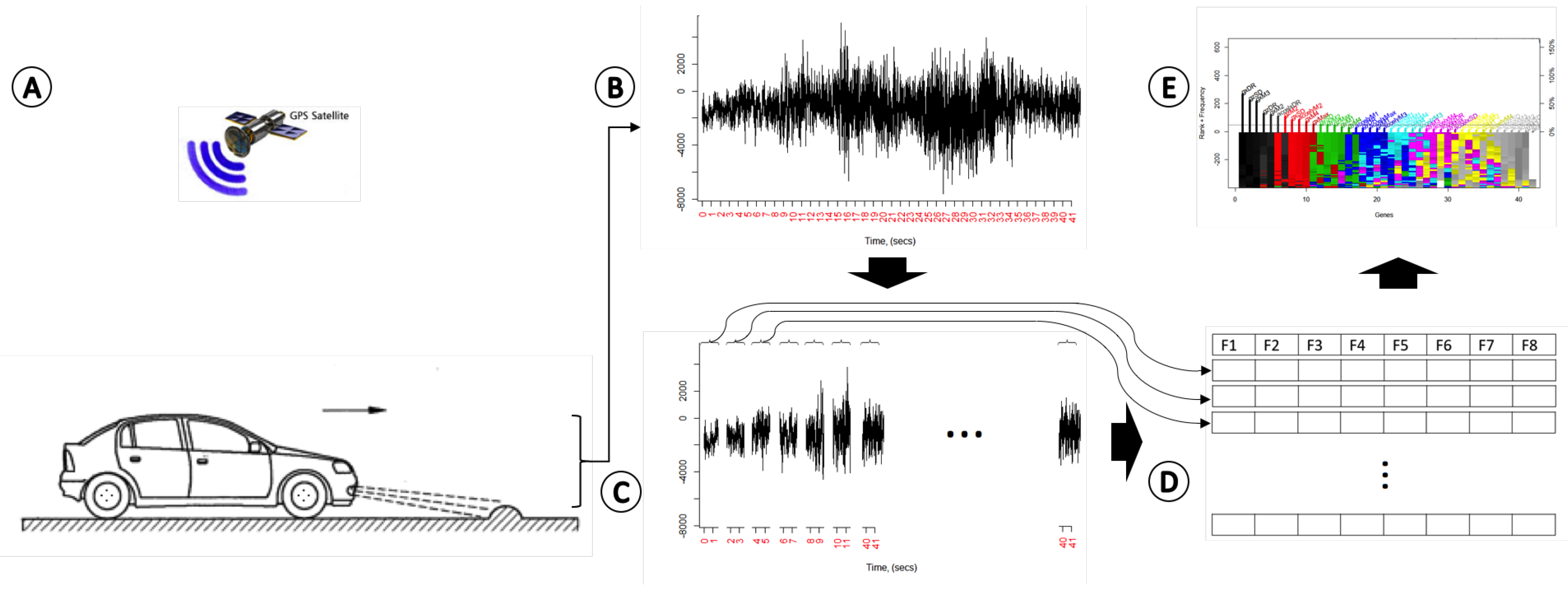
2.1. Data Collection
2.1.1. Hardware Setup
2.1.2. Location
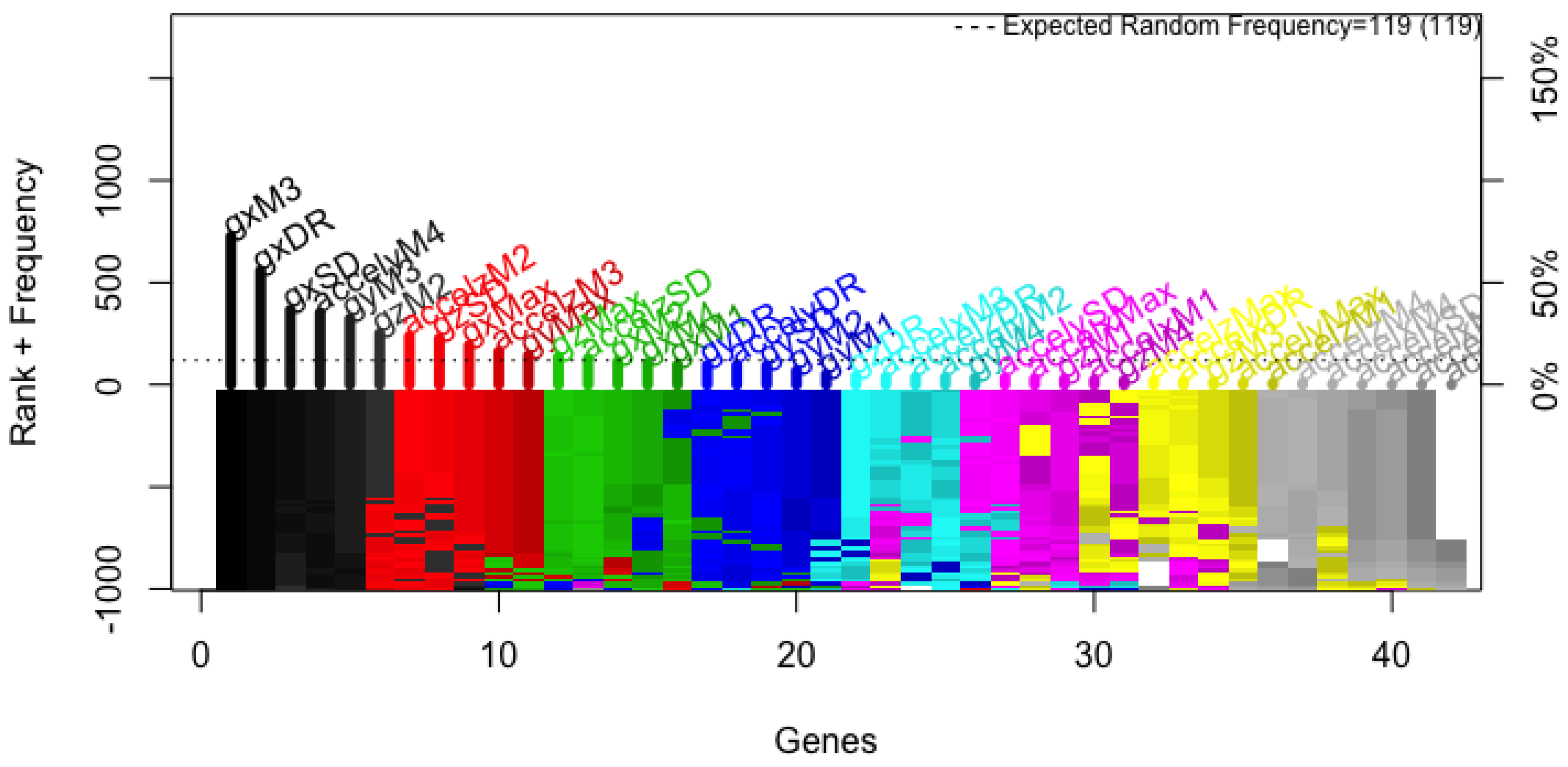
2.2. Feature Extraction
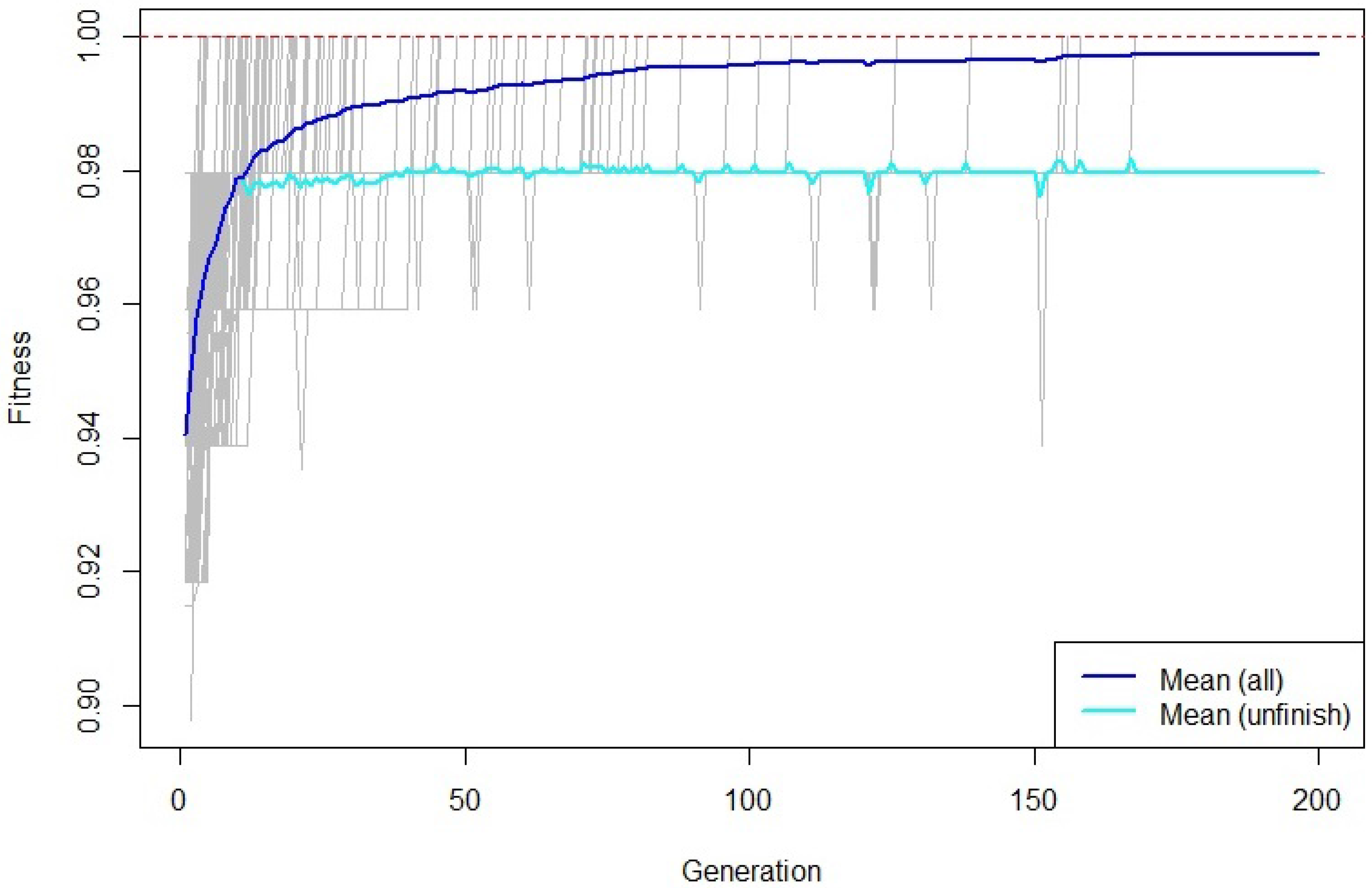
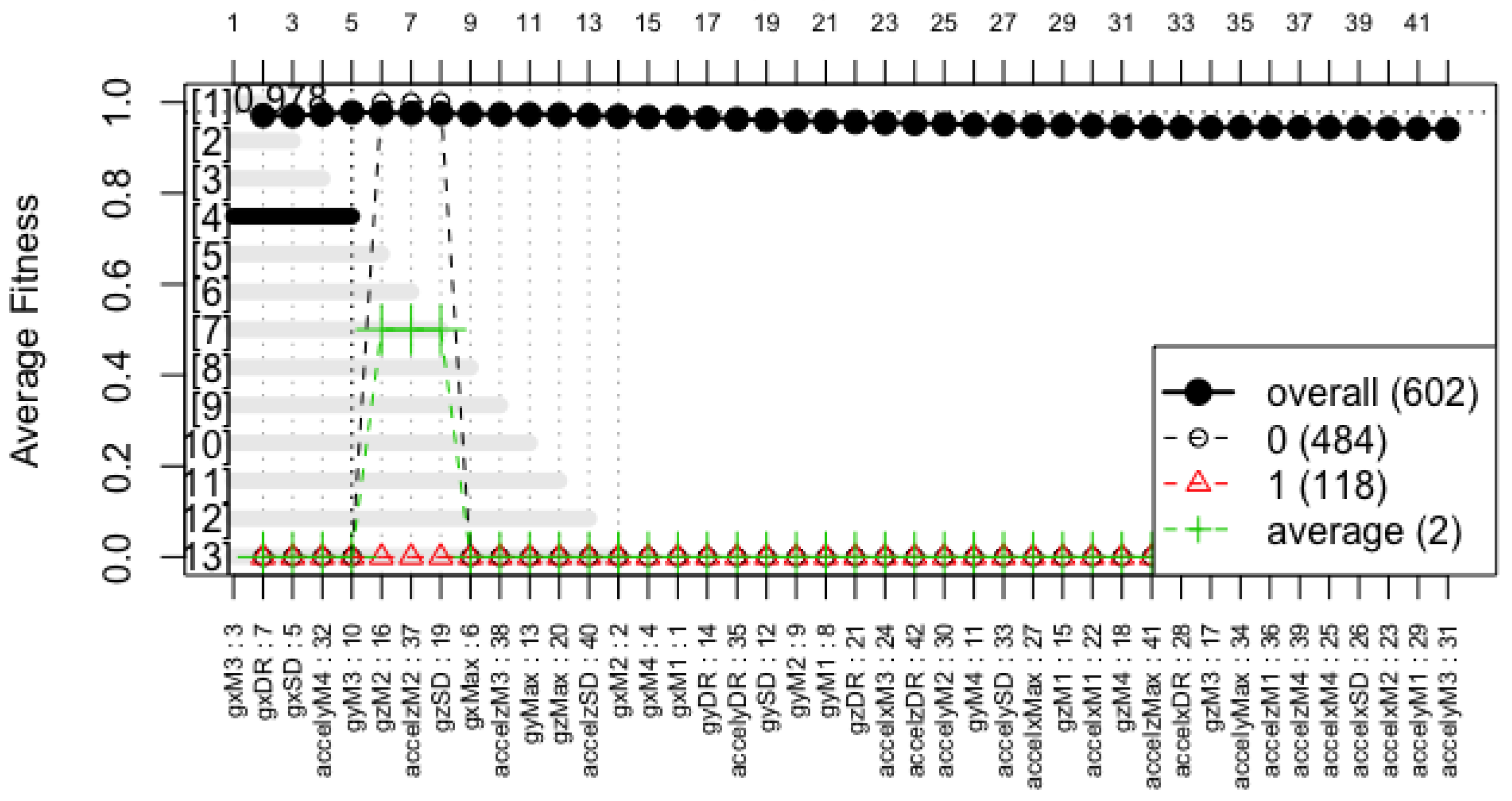
2.3. Model Construction
3. Results
4. Discussion
5. Conclusions
6. Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of things for smart cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Komninos, N. Intelligent Cities: Innovation, Knowledge Systems, and Digital Spaces; Taylor & Francis: Abingdon, UK, 2002. [Google Scholar]
- Komninos, N. Intelligent Cities and Globalisation of Innovation Networks; Routledge: Abingdon, UK, 2008. [Google Scholar]
- Dohler, M.; Vilajosana, I.; Vilajosana, X.; Llosa, J. Smart Cities: An Action Plan. In Proceedings of the Barcelona Smart Cities Congress, Barcelona, Spain, 29 November–2 December 2011; pp. 1–6. [Google Scholar]
- Fernández-Caballero, A.; Gómez, F.J.; López-López, J. Road-traffic monitoring by knowledge-driven static and dynamic image analysis. Expert Syst. Appl. 2008, 35, 701–719. [Google Scholar] [CrossRef]
- Li, X.; Shu, W.; Li, M.; Huang, H.Y.; Luo, P.E.; Wu, M.Y. Performance evaluation of vehicle-based mobile sensor networks for traffic monitoring. IEEE Trans. Veh. Technol. 2009, 58, 1647–1653. [Google Scholar]
- Barabba, V.; Huber, C.; Cooke, F.; Pudar, N.; Smith, J.; Paich, M. A multimethod approach for creating new business models: The General Motors OnStar project. Interfaces 2002, 32, 20–34. [Google Scholar] [CrossRef]
- Silva, T.H.; de Melo, P.O.V.; Viana, A.C.; Almeida, J.M.; Salles, J.; Loureiro, A.A. Traffic condition is more than colored lines on a map: characterization of waze alerts. In Proceedings of the International Conference on Social Informatics, Bellevue, WA, USA, 11–14 November 2013; pp. 309–318. [Google Scholar]
- Devapriya, W.; Babu, C.N.K.; Srihari, T. Real time speed bump detection using Gaussian filtering and connected component approach. In Proceedings of the World Conference on Futuristic Trends in Research and Innovation for Social Welfare (Startup Conclave), Coimbatore, India, 29 February–1 March 2016; pp. 1–5. [Google Scholar]
- Eriksson, J.; Girod, L.; Hull, B.; Newton, R.; Madden, S.; Balakrishnan, H. The pothole patrol: Using a mobile sensor network for road surface monitoring. In Proceedings of the 6th International Conference on Mobile Systems, Applications, and Services, Breckenridge, Colorado, 17–20 June 2008; pp. 29–39. [Google Scholar]
- Chen, K.; Lu, M.; Fan, X.; Wei, M.; Wu, J. Road condition monitoring using on-board three-axis accelerometer and GPS sensor. In Proceedings of the 2011 6th International ICST Conference on Communications and Networking in China (CHINACOM), Harbin, China, 17–19 August 2011; pp. 1032–1037. [Google Scholar]
- Mohan, P.; Padmanabhan, V.N.; Ramjee, R. Nericell: Rich monitoring of road and traffic conditions using mobile smartphones. In Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems, Raleigh, NC, USA, 5–7 November 2008; pp. 323–336. [Google Scholar]
- Arroyo, C.; Bergasa, L.M.; Romera, E. Adaptive fuzzy classifier to detect driving events from the inertial sensors of a smartphone. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1896–1901. [Google Scholar]
- Aljaafreh, A.; Alawasa, K.; Alja’afreh, S.; Abadleh, A. Fuzzy Inference System for Speed Bumps Detection Using Smart Phone Accelerometer Sensor. J. Telecommun. Electron. Comput. Eng. (JTEC) 2017, 9, 133–136. [Google Scholar]
- De Silva, G.D.; Perera, R.S.; Laxman, N.M.; Thilakarathna, K.M.; Keppitiyagama, C.I.; De Zoysa, K. Automated Pothole Detection System. In Proceedings of the International Conference on Advances in ICT for Emerging Regions, Colombo, Sri Lanka, 6–9 September 2013. [Google Scholar]
- Astarita, V.; Caruso, M.V.; Danieli, G.; Festa, D.C.; Giofrè, V.P.; Iuele, T.; Vaiana, R. A mobile application for road surface quality control: UNIquALroad. Procedia Soc. Behav. Sci. 2012, 54, 1135–1144. [Google Scholar] [CrossRef]
- González, L.C.; Moreno, R.; Escalante, H.J.; Martínez, F.; Carlos, M.R. Learning roadway surface disruption patterns using the bag of words representation. IEEE Trans. Intell. Transp. Syst. 2017. [Google Scholar] [CrossRef]
- Bello-Salau, H.; Aibinu, A.; Onwuka, E.; Dukiya, J.; Onumanyi, A. Image processing techniques for automated road defect detection: A survey. In Proceedings of the 2014 11th International Conference on Electronics, Computer and Computation (ICECCO), Abuja, Nigeria, 29 September–1 October 2014; pp. 1–4. [Google Scholar]
- Salari, E.; Yu, X. Pavement distress detection and classification using a Genetic Algorithm. In Proceedings of the 2011 Applied Imagery Pattern Recognition Workshop (AIPR), Washington, DC, USA, 11–13 October 2011; pp. 1–5. [Google Scholar]
- Velasco, A.L. Geografía y Estadística del Estado de Zacatecas; Oficina Tip. de la Secretaría de Fomento: Zacatecas, Mexico, 1894; Volume 15. [Google Scholar]
- Celaya-Padilla, J.; Martinez-Torteya, A.; Rodriguez-Rojas, J.; Galvan-Tejada, J.; Treviño, V.; Tamez-Peña, J. Bilateral Image Subtraction and Multivariate Models for the Automated Triaging of Screening Mammograms. BioMed Res. Int. 2015, 2015. [Google Scholar] [CrossRef] [PubMed]
- Celaya-Padilla, J.M.; Rodriguez-Rojas, J.; Galván-Tejada, J.I.; Martínez-Torteya, A.; Trevino, V.; Tamez-Peña, J.G. Bilateral image subtraction features for multivariate automated classification of breast cancer risk. Int. Soc. Opt. Photonics 2014. [Google Scholar] [CrossRef]
- Galván-Tejada, C.E.; Galván-Tejada, J.I.; Celaya-Padilla, J.M.; Delgado-Contreras, J.R.; Magallanes-Quintanar, R.; Martinez-Fierro, M.L.; Garza-Veloz, I.; López-Hernández, Y.; Gamboa-Rosales, H. An analysis of audio features to develop a human activity recognition model using genetic algorithms, random forests, and neural networks. Mobile Inf. Syst. 2016, 2016, 1784101. [Google Scholar] [CrossRef]
- Mitchell, M. An Introduction to Genetic Algorithms; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Trevino, V.; Falciani, F. GALGO: an R package for multivariate variable selection using genetic algorithms. Bioinformatics 2006, 22, 1154–1156. [Google Scholar] [CrossRef] [PubMed]
- Bhoraskar, R.; Vankadhara, N.; Raman, B.; Kulkarni, P. Wolverine: Traffic and road condition estimation using smartphone sensors. In Proceedings of the 2012 Fourth International Conference on Communication Systems and Networks (COMSNETS), Bangalore, India, 3–7 January 2012; pp. 1–6. [Google Scholar]
- Mednis, A.; Strazdins, G.; Zviedris, R.; Kanonirs, G.; Selavo, L. Real time pothole detection using android smartphones with accelerometers. In Proceedings of the 2011 International Conference on Distributed Computing in Sensor Systems and Workshops (DCOSS), Barcelona, Spain, 27–29 June 2011; pp. 1–6. [Google Scholar]
- Mohamed, A.; Fouad, M.M.M.; Elhariri, E.; El-Bendary, N.; Zawbaa, H.M.; Tahoun, M.; Hassanien, A.E. RoadMonitor: An intelligent road surface condition monitoring system. In Intelligent Systems’ 2014; Springer: Berlin, Germany, 2015; pp. 377–387. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware | Description |
|---|---|
| Raspberry Pi 3 | Low cost ARM computer with a Quad Core 1.2GHz 64-bit CPU, 1 GB RAM, wireless LAN and Bluetooth, GPIO, and 4 USB 2.0 ports, power consumption: 800 mA |
| MPU6050 | This sensor includes a MEMS-accelerometer and a MEMS-gyro in a single chip. It includes 16-bit analog to digital conversion capabilities for each channel, capturing the x-, y-, and z-channel at the same time, power consumption: 3.9 mA |
| 7″ multi-touch screen | An 800 × 480 display that connects via the DSI port of the Raspberry Pi. It supports up to 10-finger touch, power consumption: 600 mA |
| BU-353-S4 | A SiRF Star IV powered GPS sensor with a 1 Hz. refresh rate, and a < 2.5 m. accuracy, power consumption: 55 mA. |
| TL-PB10400 | 10400 mAh external battery |
| Feature | Formula |
|---|---|
| Mean (M1) | |
| Variance (M2) | |
| Skewness (M3) | |
| kurtosis (M4) | |
| Standard Deviation | |
| Max | |
| Dynamic range |
| Feature | Coefficient | Std. Error | z-Value | p-Value |
|---|---|---|---|---|
| Intercept | −8.066 | 1.254 | −6.433 | 1.250 × 10 |
| gxM3 | −1.131 | 4.370 × 10 | −2.589 | 9.633 × 10 |
| gxDR | 5.070 × 10 | 5.974 × 10 | 8.487 | < 2 × 10 |
| gyM3 | 2.500 | 7.024 × 10 | 3.560 | 3.710 × 10 |
| ayM4 | −7.382 × 10 | 2.335 × 10 | −3.162 | 1.569 × 10 |
| Author | Approach | Performance |
|---|---|---|
| Devapriya et al. [9] | Computer vision | 30–92% TPR |
| Eriksson et al. [10] | Accelerometer and GPS | 0.2% FPR |
| Mohan et al. [12] | Accelerometer, microphone, GPS, and GSM antenna | 11.1% FPR and 22% FNR |
| Mednis et al. [27] | Accelerometer | 90% TPR |
| Bhoraskar et al. [26] | Accelerometer, magnetometer, and GPS | 10% FNR |
| Mohamed et al. [28] | Accelerometer | 75.76–87.8% accuracy |
| Arroyo et al. [13] | Accelerometer, GPS | 0.87 AUC, 0.91 recall |
| Aljaafreh et al. [14] | Accelerometer, smart phone | N/A |
| Silva et al. [8] | Accelerometer | 0.70–80% accuracy |
| Astarita et al. [16] | Accelerometer, smart phone | 90% accuracy, 35% FP |
| González et al. [17] | Accelerometer, gyro, smart phone | 0.82–0.944 AUC |
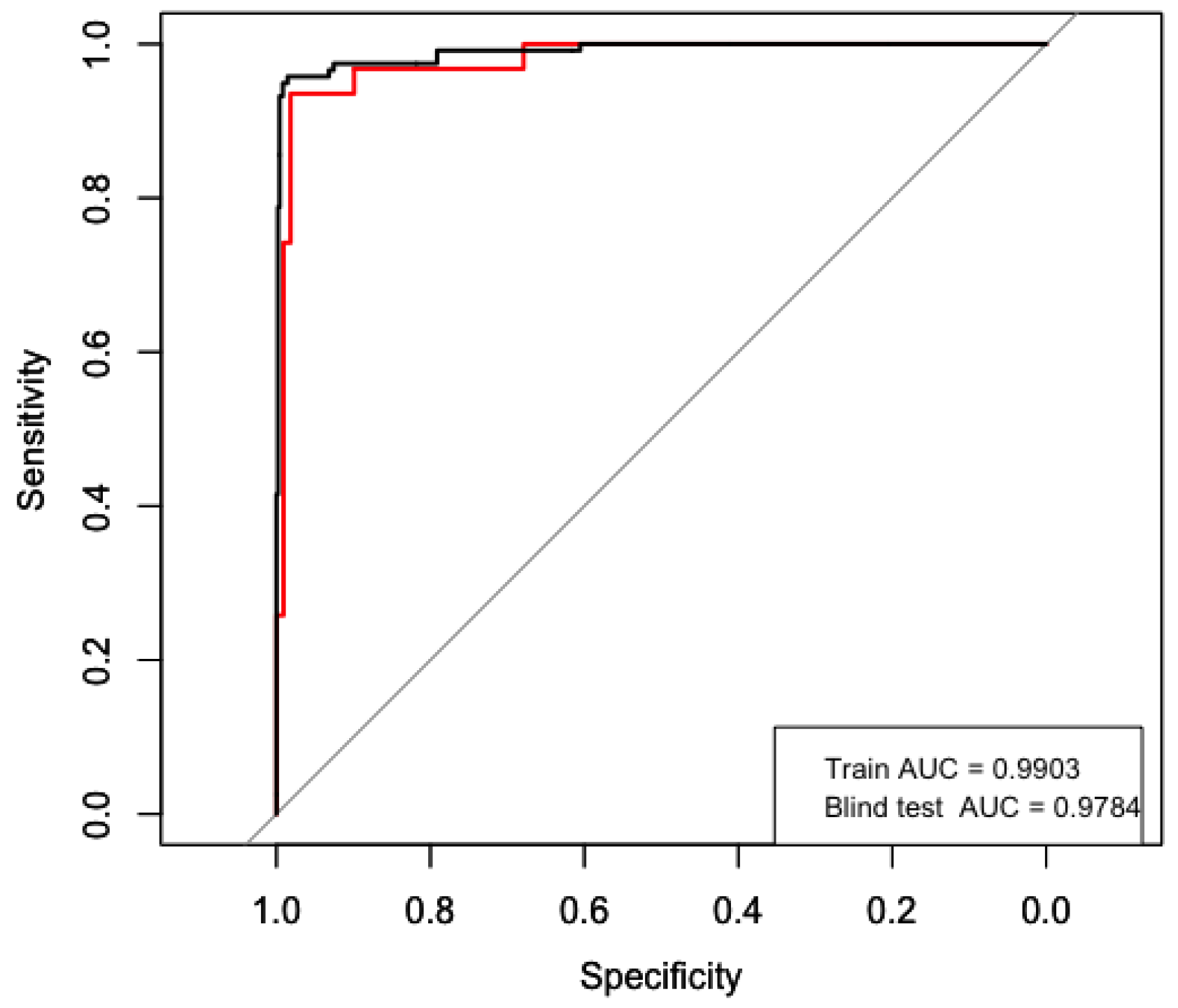
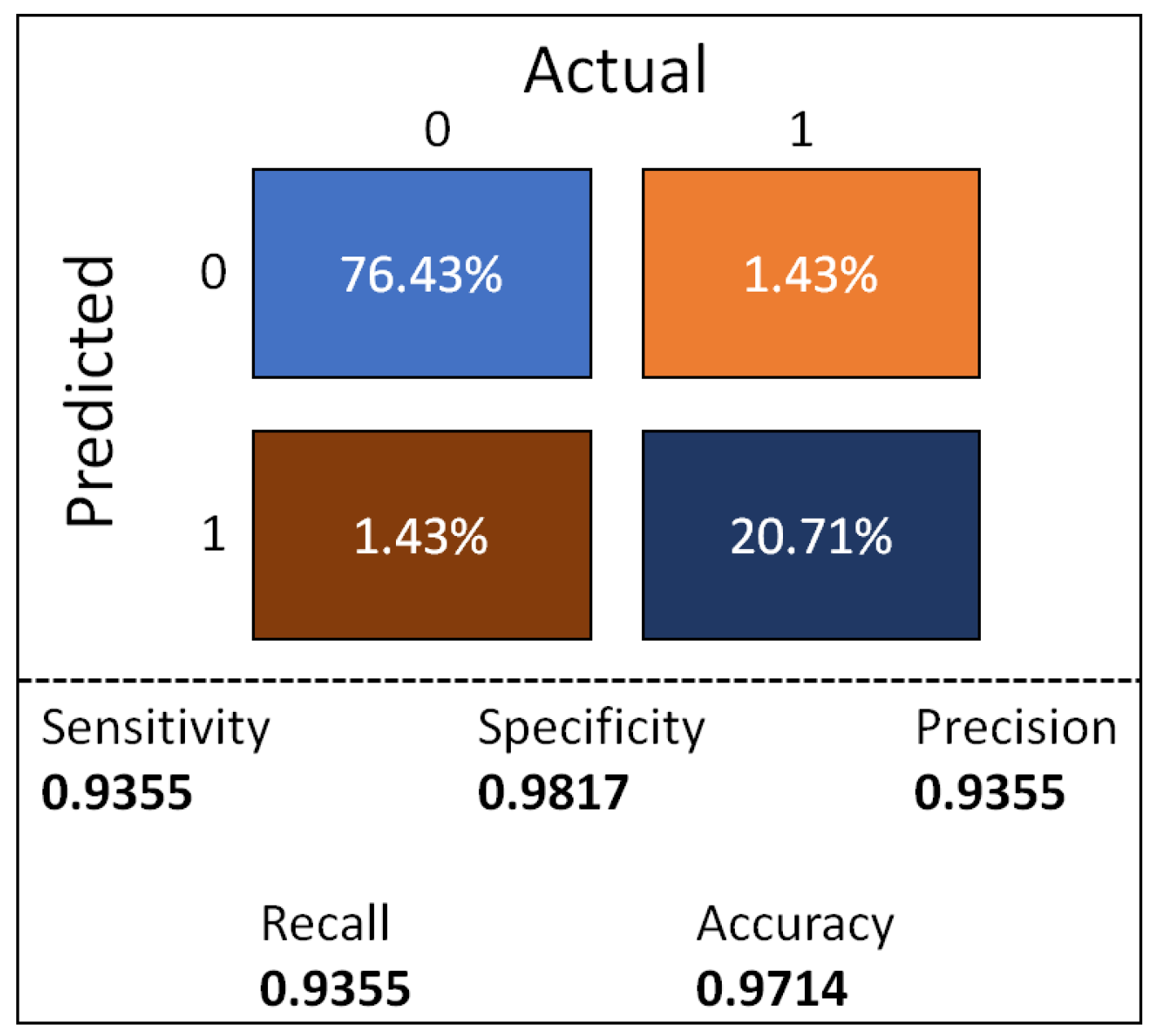
| Proposed approach | Accelerometer, gyro, and GPS | 97.14% accuracy, FPR < 0.018%, AUC of 0.9784 |
| k | Train Data Set | Blind Data Set |
|---|---|---|
| 1 | 0.9903 | 0.9784 |
| 2 | 0.9877 | 0.9954 |
| 3 | 0.9903 | 0.9968 |
| 4 | 0.9872 | 0.9777 |
| 5 | 0.9917 | 0.9859 |
| Average | 0.9894 | 0.9868 |
| k | Train Data Set | Blind Data Set |
|---|---|---|
| 1 | 0.9945 | 0.9731 |
| 2 | 0.9865 | 0.9806 |
| 3 | 0.9867 | 0.9761 |
| 4 | 0.9855 | 0.9845 |
| 5 | 0.9909 | 0.9924 |
| Average | 0.98882 | 0.98134 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Celaya-Padilla, J.M.; Galván-Tejada, C.E.; López-Monteagudo, F.E.; Alonso-González, O.; Moreno-Báez, A.; Martínez-Torteya, A.; Galván-Tejada, J.I.; Arceo-Olague, J.G.; Luna-García, H.; Gamboa-Rosales, H. Speed Bump Detection Using Accelerometric Features: A Genetic Algorithm Approach. Sensors 2018, 18, 443. https://doi.org/10.3390/s18020443
Celaya-Padilla JM, Galván-Tejada CE, López-Monteagudo FE, Alonso-González O, Moreno-Báez A, Martínez-Torteya A, Galván-Tejada JI, Arceo-Olague JG, Luna-García H, Gamboa-Rosales H. Speed Bump Detection Using Accelerometric Features: A Genetic Algorithm Approach. Sensors. 2018; 18(2):443. https://doi.org/10.3390/s18020443
Chicago/Turabian StyleCelaya-Padilla, Jose M., Carlos E. Galván-Tejada, F. E. López-Monteagudo, O. Alonso-González, Arturo Moreno-Báez, Antonio Martínez-Torteya, Jorge I. Galván-Tejada, Jose G. Arceo-Olague, Huizilopoztli Luna-García, and Hamurabi Gamboa-Rosales. 2018. "Speed Bump Detection Using Accelerometric Features: A Genetic Algorithm Approach" Sensors 18, no. 2: 443. https://doi.org/10.3390/s18020443
APA StyleCelaya-Padilla, J. M., Galván-Tejada, C. E., López-Monteagudo, F. E., Alonso-González, O., Moreno-Báez, A., Martínez-Torteya, A., Galván-Tejada, J. I., Arceo-Olague, J. G., Luna-García, H., & Gamboa-Rosales, H. (2018). Speed Bump Detection Using Accelerometric Features: A Genetic Algorithm Approach. Sensors, 18(2), 443. https://doi.org/10.3390/s18020443