Integrated Change Detection and Classification in Urban Areas Based on Airborne Laser Scanning Point Clouds



Abstract
:1. Introduction
2. Related Work
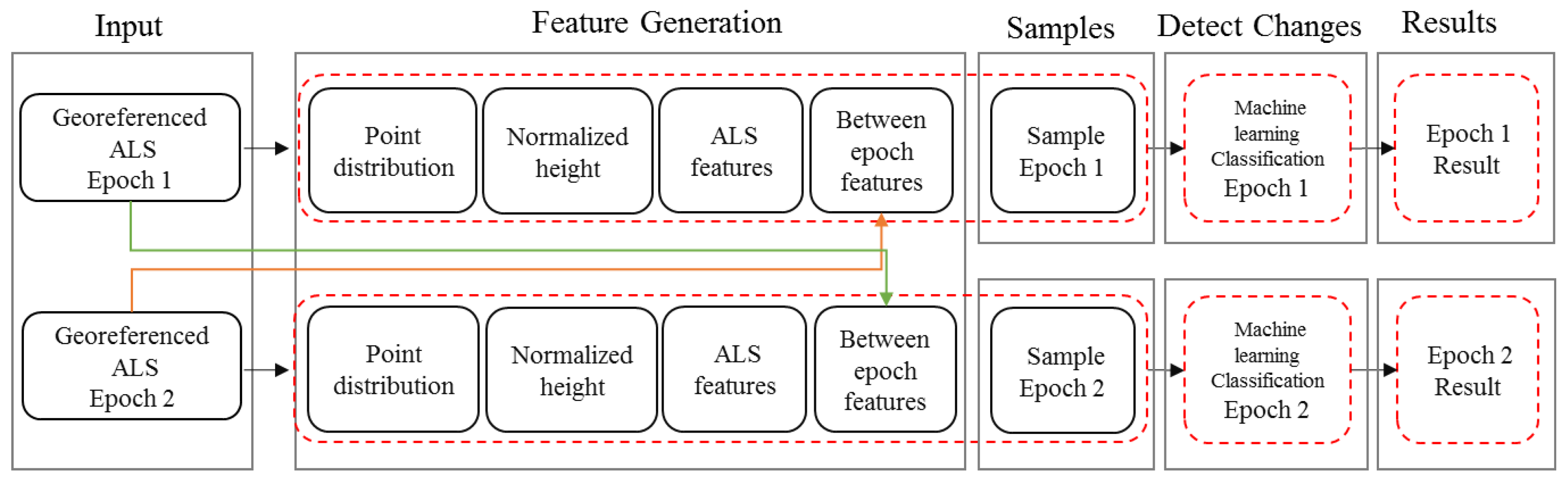
3. Methodology
3.1. Outlier Detection
3.2. Features
3.3. Training Sample
3.4. Change Types Classification
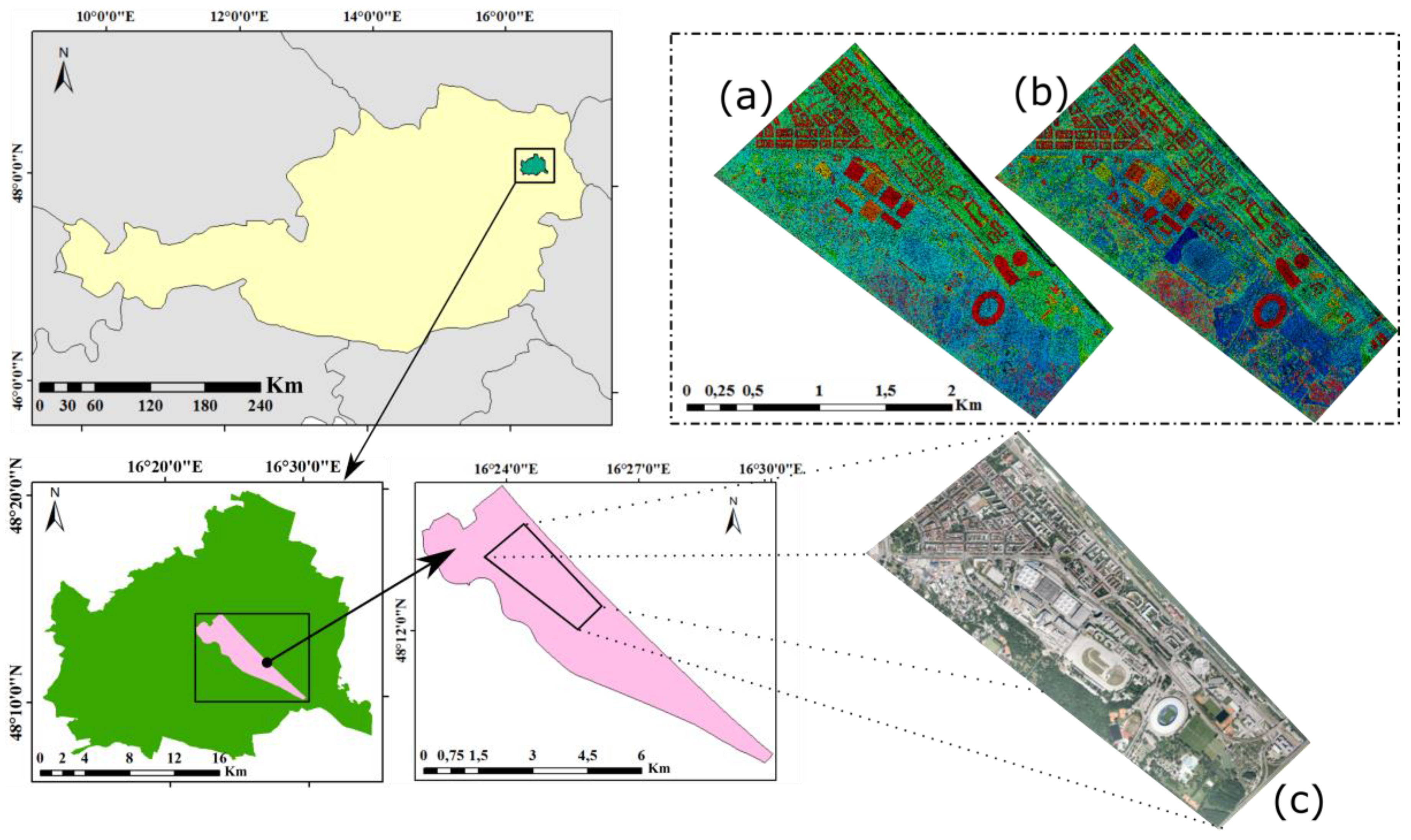
4. Study Site
5. Results and Discussion
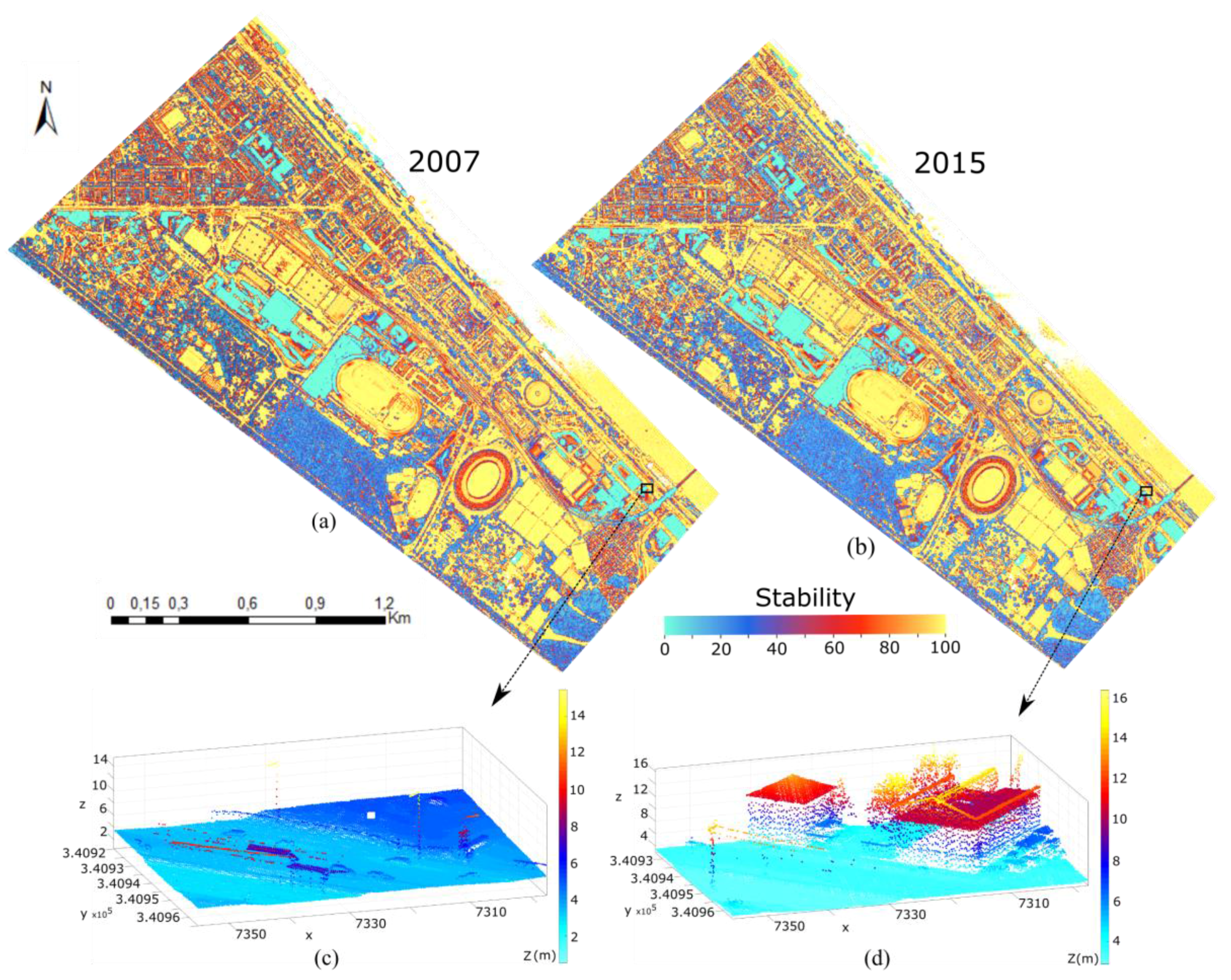
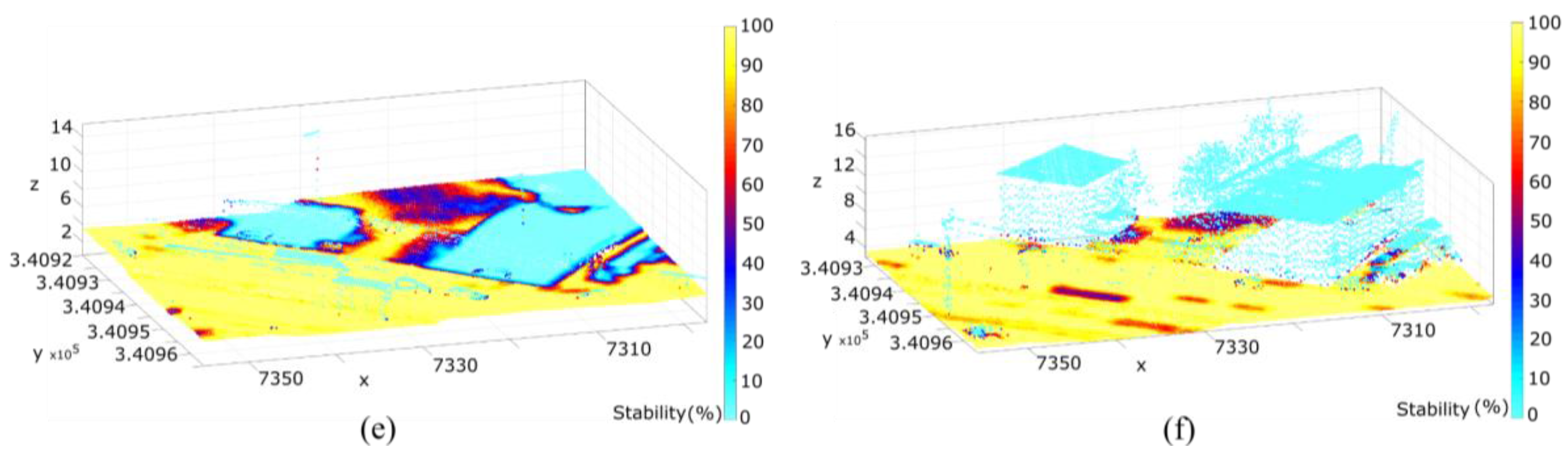
5.1. Stability Feature
5.2. Sampling Training Data and Classification
5.3. Impact of Using the Raw Point Cloud
5.4. Accuracy Evaluation
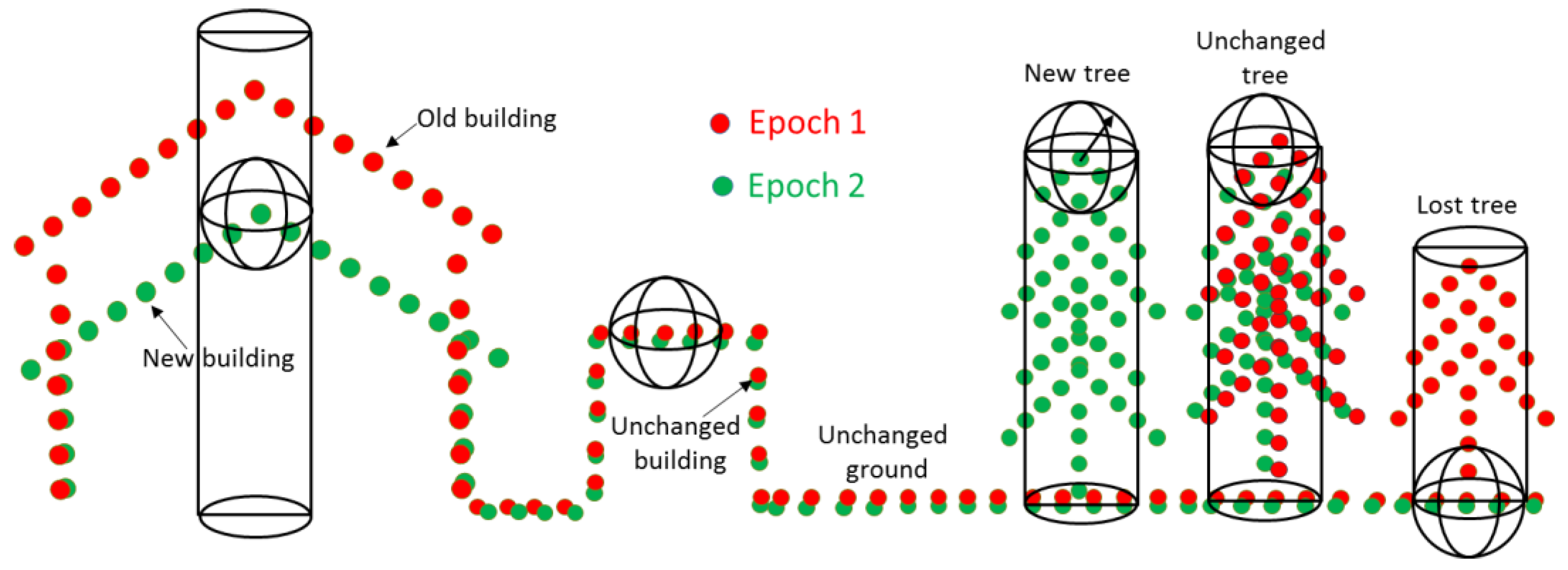
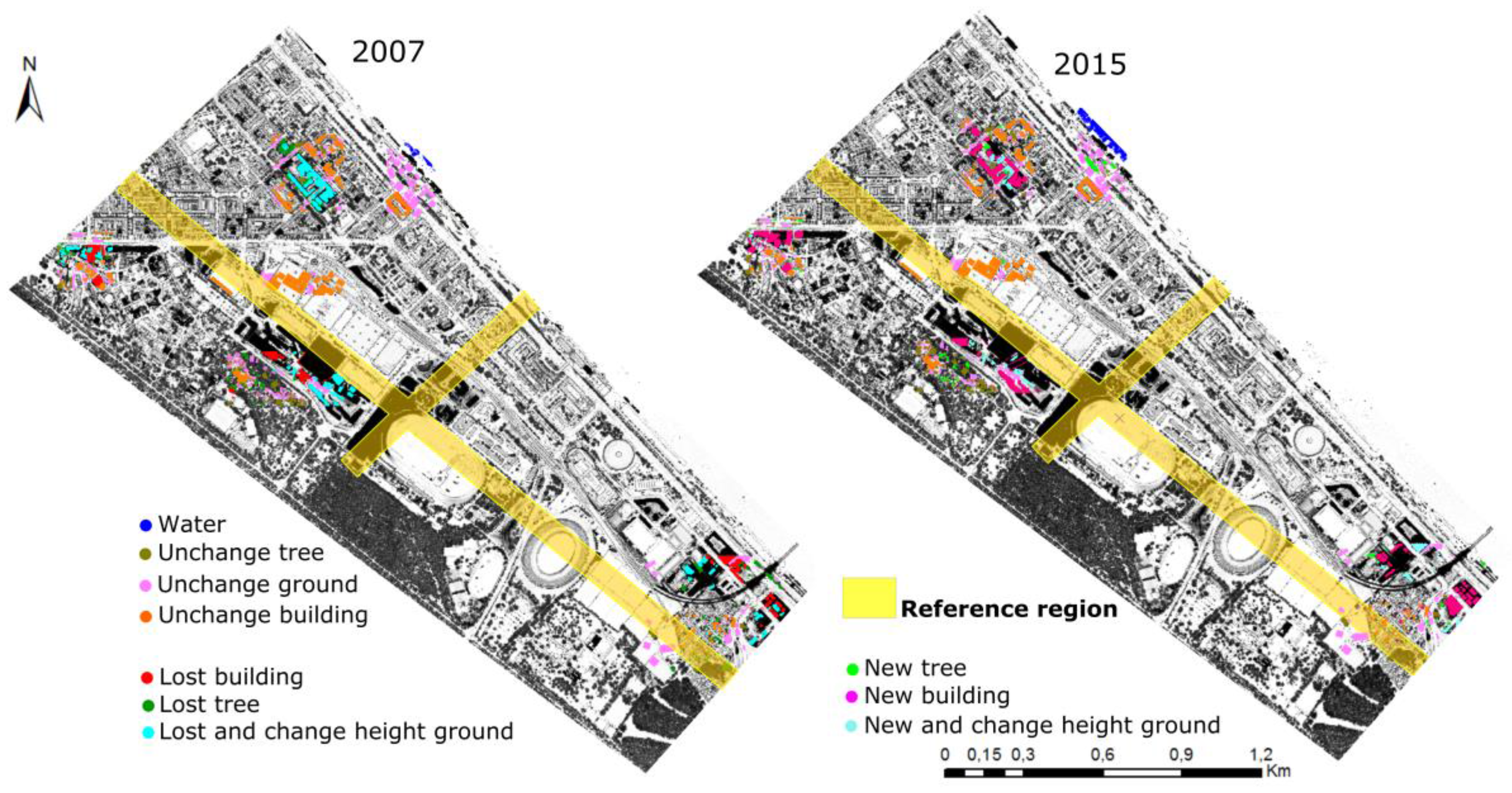
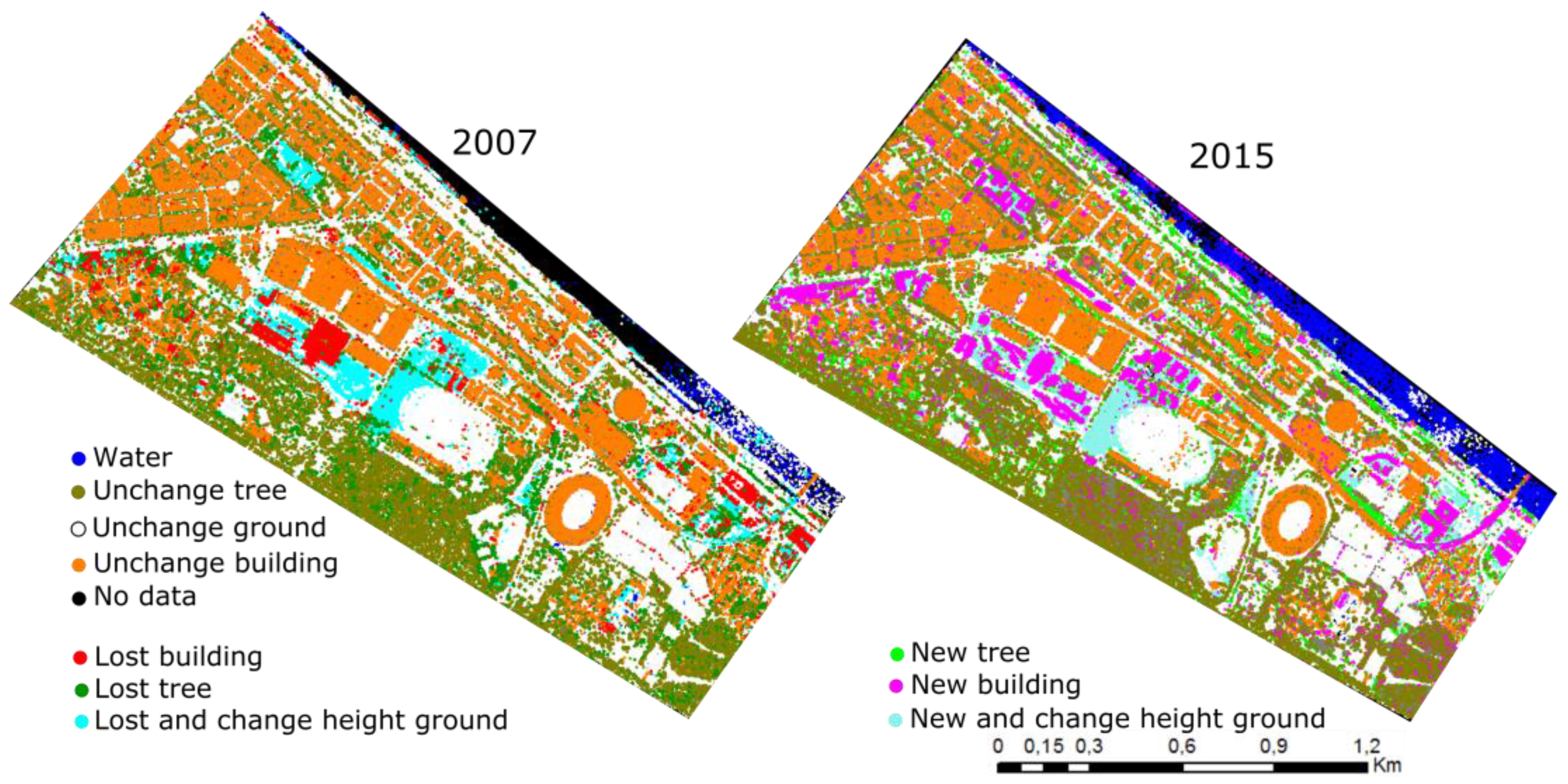
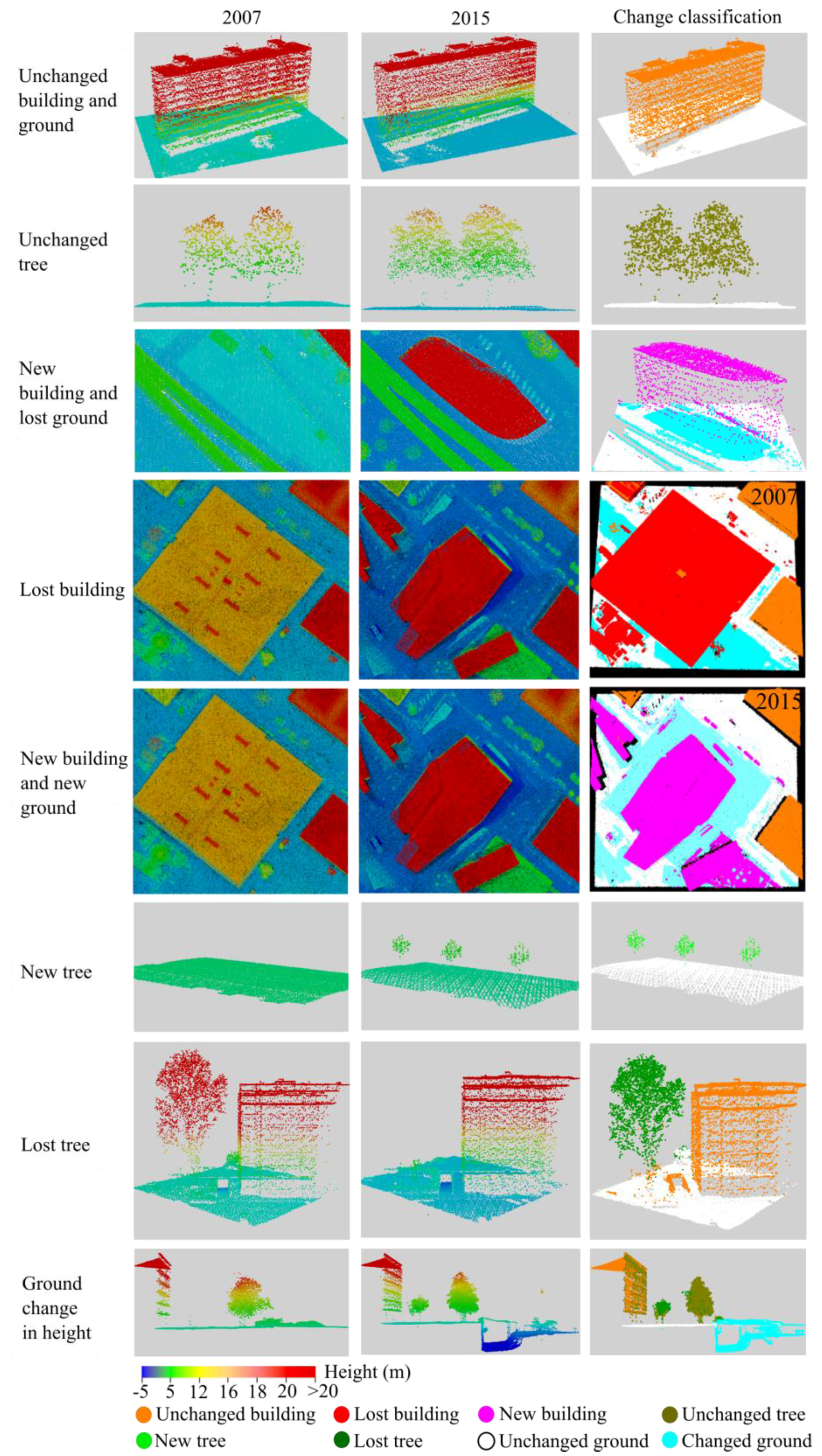
- Unchanged buildings: The same geometric building in two epochs or buildings which have changes in roof but lower than 1 m (i.e., paying tribute to the chosen search radius).
- Lost buildings: Buildings are available in the older data but not in the later data.
- New buildings: Buildings are available in the later data but not in the older data.
- Unchanged ground: The height of the ground did not change more than 0.5 m.
- Changed ground: The ground has changed in height, changed to other types of land use (i.e., new buildings), or new ground.
- Unchanged trees: Trees at the same position.
- Lost trees: Trees that were cut.
- New trees: Newly planted trees.
- High points: Cars, fences (wooden, concrete, metal, and small bushes), wires, ships on the water, etc.
5.5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hebel, M.; Arens, M.; Stilla, U. Change detection in urban areas by object-based analysis and on-the-fly comparison of multi-view ALS data. ISPRS. J. Photogramm. 2013, 86, 52–64. [Google Scholar] [CrossRef]
- Güler, M.; Yomralioǧu, T.; Reis, S. Using landsat data to determine land use/land cover changes in Samsun, Turkey. Environ. Monit. Assess. 2007, 127, 155–167. [Google Scholar] [CrossRef] [PubMed]
- Menaka, E.; Kumar, S.S.; Bharathi, M. Change detection in deforestation using high resolution satellite image with Haar wavelet transforms. In Proceedings of the 2013 International Conference on Green High Performance Computing, ICGHPC 2013, Nagercoil, India, 14–15 March 2013. [Google Scholar]
- Brunner, D.; Bruzzone, L.; Lemoine, G. Change detection for earthquake damage assessment in built-up areas using very high resolution optical and SAR imagery. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 3210–3213. [Google Scholar]
- Anniballe, R.; Chini, M.; Pierdicca, N.; Bignami, C.; Stramondo, S.; Noto, F.; Scalia, T.; Martinelli, A.; Mannella, A. Detecting earthquake damage in urban area: Application to COSMO-SkyMed imagery of L’Aquila earthquake. In Proceedings of the SPIE 9642, SAR Image Analysis, Modeling, and Techniques XV, Toulouse, France, 23 October 2015; 96420C. [Google Scholar]
- Lu, D.; Mausel, P.; Brondízio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2004, 25, 2365–2401. [Google Scholar] [CrossRef]
- Muchoney, D.M.; Haack, B.N. Change detection for monitoring forest defoliation. Photogramm. Eng. Remote Sens. 1994, 60, 1243–1251. [Google Scholar]
- Ying, Q.; Hansen, M.C.; Potapov, P.V.; Tyukavina, A.; Wang, L.; Stehman, S.V.; Moore, R.; Hancher, M. Global bare ground gain from 2000 to 2012 using Landsat imagery. Remote Sens. Environ. 2017, 194, 161–176. [Google Scholar] [CrossRef]
- Li, G.; Zhang, F.; Jing, Y.; Liu, Y.; Sun, G. Response of evapotranspiration to changes in land use and land cover and climate in China during 2001–2013. Sci. Total Environ. 2017, 596–597, 256–265. [Google Scholar] [CrossRef] [PubMed]
- Lunetta, R.S.; Knight, J.F.; Ediriwickrema, J.; Lyon, J.G.; Worthy, L.D. Land-cover change detection using multi-temporal MODIS NDVI data. Remote Sens. Environ. 2006, 105, 142–154. [Google Scholar] [CrossRef]
- Meyfroidt, P.; Lambin, E.F. Forest transition in Vietnam and its environmental impacts. Glob. Chang. Biol. 2008, 14, 1319–1336. [Google Scholar] [CrossRef]
- Sesnie, S.E.; Gessler, P.E.; Finegan, B.; Thessler, S. Integrating Landsat TM and SRTM-DEM derived variables with decision trees for habitat classification and change detection in complex neotropical environments. Remote Sens. Environ. 2008, 112, 2145–2159. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, J.; Li, P.; Zhang, L.; Shi, L.; Lang, F. Damage assessment in urban areas using post-earthquake airborne PolSAR imagery. Int. J. Remote Sens. 2013, 34, 8952–8966. [Google Scholar] [CrossRef]
- Guida, R.; Iodice, A.; Riccio, D. Monitoring of collapsed built-up areas with high resolution SAR images. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 2422–2425. [Google Scholar]
- Vakalopoulou, M.; Karatzalos, K.; Komodakis, N.; Paragios, N. Simultaneous registration and change detection in multitemporal, very high resolution remote sensing data. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Boston, MA, USA, 7–12 June 2015; pp. 61–69. [Google Scholar]
- Chen, G.; Zhao, K.; Powers, R. Assessment of the image misregistration effects on object-based change detection. ISPRS J. Photogramm. 2014, 87, 19–27. [Google Scholar] [CrossRef]
- Qin, R.; Gong, J.; Li, H.; Huang, X. A coarse elevation map-based registration method for super-resolution of three-line scanner images. Photogramm. Eng. Remote Sens. 2013, 79, 717–730. [Google Scholar] [CrossRef]
- Waser, L.T.; Baltsavias, E.; Ecker, K.; Eisenbeiss, H.; Feldmeyer-Christe, E.; Ginzler, C.; Küchler, M.; Zhang, L. Assessing changes of forest area and shrub encroachment in a mire ecosystem using digital surface models and CIR aerial images. Remote Sens. Environ. 2008, 112, 1956–1968. [Google Scholar] [CrossRef]
- Tian, J.; Nielsen, A.A.; Reinartz, P. Improving change detection in forest areas based on stereo panchromatic imagery using kernel MNF. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7130–7139. [Google Scholar] [CrossRef]
- Qin, R.; Tian, J.; Reinartz, P. 3D change detection—Approaches and applications. Photogramm. Eng. Remote Sens. 2016, 122, 41–56. [Google Scholar] [CrossRef]
- Biljecki, F.; Ledoux, H.; Stoter, J. Generating 3D city models without elevation data. Comput. Environ. Urban Syst. 2017, 64, 1–18. [Google Scholar] [CrossRef]
- Steinhage, V.; Behley, J.; Meisel, S.; Cremers, A.B. Automated updating and maintnance of 3D city models. In Proceedings of the Core Spatial Databased—Updating, Maintenance and Services ISPRS Archive, Haifa, Israel, 15–17 March 2010; pp. 1–6. [Google Scholar]
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. Automated progress monitoring using unordered daily construction photographs and IFC-based building information models. J. Comput. Civ. Eng. 2015, 29. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. Monitoring changes of 3D building elements from unordered photo collections. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011; pp. 249–256. [Google Scholar]
- Matsumoto, J.; Nishimaru, H.; Ono, T.; Nishijo, H. 3D-video-based computerized behavioral analysis for in vivo neuropharmacology and neurophysiology in rodents. In Vivo Neuropharmacology and Neurophysiology; Humana Press: New York, NY, USA, 2017; pp. 89–105. ISBN 978-1-4939-6490-1. [Google Scholar]
- Matsumoto, J.; Urakawa, S.; Takamura, Y.; Malcher-Lopes, R.; Hori, E.; Tomaz, C.; Ono, T.; Nishijo, H. A 3D-video-based computerized analysis of social and sexual interactions in rats. PLoS ONE 2013, 8, e78460. [Google Scholar] [CrossRef] [PubMed]
- Meyer, V.; Saatchi, S.S.; Chave, J.; Dalling, J.W.; Bohlman, S.; Fricker, G.A.; Robinson, C.; Neumann, M.; Hubbell, S. Detecting tropical forest biomass dynamics from repeated airborne LiDAR measurements. Biogeosciences 2013, 10, 5421–5438. [Google Scholar] [CrossRef]
- Wu, G.; Jiang, X.; Xie, H.; Park, D.-H. Experimental study on tree growth in XLPE using 3D PD patterns. In Proceedings of the 6th International Conference on Properties and Applications of Dielectric Materials (Cat. No.00CH36347), Xi’an, China, 21–26 June 2000; pp. 558–561. [Google Scholar]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LiDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Tran, T.H.G.; Hollaus, M.; Nguyen, B.D.; Pfeifer, N. Assessment of wooded area reduction by airborne laser scanning. Forests 2015, 6, 1613–1627. [Google Scholar] [CrossRef]
- Rutzinger, M.; Höfle, B.; Hollaus, M.; Pfeifer, N. Object-based point cloud analysis of full-waveform airborne laser scanning data for urban vegetation classification. Sensors 2008, 8, 4505–4528. [Google Scholar] [CrossRef] [PubMed]
- Egberth, M.; Nyberg, G.; Næsset, E.; Gobakken, T.; Mauya, E.; Malimbwi, R.; Katani, J.; Chamuya, N.; Bulenga, G.; Olsson, H. Combining airborne laser scanning and Landsat data for statistical modeling of soil carbon and tree biomass in Tanzanian Miombo woodlands. Carbon Balance Manag. 2017, 12. [Google Scholar] [CrossRef] [PubMed]
- Gruno, A.; Liibusk, A.; Ellmann, A.; Oja, T.; Vain, A.; Jürgenson, H. Determining sea surface heights using small footprint airborne laser scanning. In Proceedings of the SPIE 8888, Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions 2013, Dresden, Germany, 16 October 2013. [Google Scholar] [CrossRef]
- Xu, H.; Cheng, L.; Li, M.; Chen, Y.; Zhong, L. Using Octrees to Detect Changes to Buildings and Trees in the Urban Environment from Airborne LiDAR Data. Remote Sens. 2015, 7, 9682–9704. [Google Scholar] [CrossRef]
- Breiman, L. Machine Learning; Kluwer Academic: Dordrecht, The Netherlands, 2001; Volume 45, pp. 5–32. ISSN 0885-6125. [Google Scholar]
- Matikainen, L.; Hyyppä, J.; Kaartinen, H. Automatic detection of changes from laser scanner and aerial image data for updating building maps. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 434–439. [Google Scholar]
- Matikainen, L.; Hyyppä, J.; Ahokas, E.; Markelin, L.; Kaartinen, H. Automatic detection of buildings and changes in buildings for updating of maps. Remote Sens. 2010, 2, 1217–1248. [Google Scholar] [CrossRef]
- Stal, C.; Tack, F.; De Maeyer, P.; De Wulf, A.; Goossens, R. Airborne photogrammetry and LiDAR for DSM extraction and 3D change detection over an urban area—A comparative study. Int. J. Remote Sens. 2013, 34, 1087–1110. [Google Scholar] [CrossRef] [Green Version]
- Malpica, J.A.; Alonso, M.C.; Papí, F.; Arozarena, A.; Martínez De Agirre, A. Change detection of buildings from satellite imagery and LiDAR data. Int. J. Remote Sens. 2013, 34, 1652–1675. [Google Scholar] [CrossRef]
- Matikainen, L.; Hyyppä, J.; Litkey, P. Multispectral Airborne Laser Scanning for Automated Map Updating. In Proceedings of the International Archieves of the Photogrammetry, Remote Sensing and Spatial Information Science, XLI-B3, Prague, Czech Republic, 12–19 July 2016; pp. 323–330. [Google Scholar]
- Matikainen, L.; Karila, K.; Hyyppä, J.; Litkey, P.; Puttonen, E.; Ahokas, E. Object-based analysis of multispectral airborne laser scanner data for land cover classification and map updating. ISPRS J. Photogramm. Remote Sens. 2017, 128, 298–313. [Google Scholar] [CrossRef]
- Vosselman, G.; Gorte, B.G.H.; Sithole, G. Change detection for updating medium scale maps using laser altimetry. In Proceedings of the International Archives of the Photogrammtry, Remote Sensing and Spatial Information Sciences, Istanbul, Turkey, 12–23 July 2004; Volume 34, pp. 207–212. [Google Scholar]
- Tang, F.; Xiang, Z.; Teng, D.; Hu, B.; Bai, Y. A multilevel change detection method for buildings using laser scanning data and GIS data. In Proceedings of the 2015 IEEE International Conference on Digital Signal Processing (DSP), Singapore, 21–24 July 2015; pp. 1011–1015. [Google Scholar]
- Awrangjeb, M. Effective generation and update of a building map database through automatic building change detection from LiDAR point cloud data. Remote Sens. 2015, 7, 14119–14150. [Google Scholar] [CrossRef]
- Choi, K.; Lee, I.; Kim, S. A feature based approach to automatic change detection from LiDAR data in urban areas. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Paris, France, 1–3 September 2009; Volume 38. [Google Scholar]
- Xu, S.; Vosselman, G.; Oude Elberink, S. Detection and Classification of Changes in Buildings from Airborne Laser Scanning Data. Remote Sens. 2015, 7, 17051–17076. [Google Scholar] [CrossRef]
- Teo, T.A.; Shih, T.Y. LiDAR-based change detection and change-type determination in urban areas. Int. J. Remote Sens. 2013, 34, 968–981. [Google Scholar] [CrossRef]
- Murakami, H.; Nakagawa, K.; Hasegawa, H.; Shibata, T.; Iwanami, E. Change detection of buildings using an airborne laser scanner. ISPRS J. Photogramm. Remote Sens. 1999, 54, 148–152. [Google Scholar] [CrossRef]
- Pang, S.; Hu, X.; Wang, Z.; Lu, Y. Object-Based Analysis of Airborne LiDAR Data for Building Change Detection. Remote Sens. 2014, 6, 10733–10749. [Google Scholar] [CrossRef]
- Vu, T.T.; Matsuoka, M.; Yamazaki, F. LiDAR-based change detection of buildings in dense urban areas. In Proceedings of the 2004 IGARSS’04Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; pp. 3413–3416. [Google Scholar]
- Zhang, X.; Glennie, C. Change detection from differential airborne LiDAR using a weighted anisotropic iterative closest point algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3338–3346. [Google Scholar] [CrossRef]
- Estivill-Castro, V.; Lee, I. Argument free clustering for large spatial point-data sets via boundary extraction from Delaunay Diagram. Comput. Environ. Urban Syst. 2002, 26, 315–334. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Mallet, C.; Bretar, F.; Roux, M.; Soergel, U.; Heipke, C. Relevance assessment of full-waveform LiDAR data for urban area classification. ISPRS J. Photogramm. 2011, 66 (Suppl. 6), S71–S84. [Google Scholar] [CrossRef]
- Shirowzhan, S.; Trinder, J. Building Classification from LiDAR Data for Spatio-temporal Assessment of 3D Urban Developments. Procedia Eng. 2017, 180, 1453–1461. [Google Scholar] [CrossRef]
- Hernández, J.; Marcotegui, B. Point cloud segmentation towards urban ground modeling. In Proceedings of the 2009 Joint Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009. [Google Scholar]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Lampinen, J.; Kaartinen, H.; Kukko, A.; Puttonen, E.; Hyyppä, H. Object Classification and Recognition From Mobile Laser Scanning Point Clouds in a Road Environment. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1226–1239. [Google Scholar] [CrossRef]
- Guo, L.; Chehata, N.; Mallet, C.; Boukir, S. Relevance of airborne LiDAR and multispectral image data for urban scene classification using Random Forests. ISPRS J. Photogramm. Remote Sens. 2011, 66, 56–66. [Google Scholar] [CrossRef]
- Ni, H.; Lin, X.; Zhang, J. Classification of ALS point cloud with improved point cloud segmentation and random forests. Remote Sens. 2017, 9, 288. [Google Scholar] [CrossRef]
- Sutton, C.; McCallum, A.; Rohanimanesh, K. Dynamic conditional random fields: Factorized probabilistic models for labeling and segmenting sequence data. J. Mach. Learn. Res. 2007, 8, 693–723. [Google Scholar]
- Niemeyer, J.; Rottensteiner, F.; Soergel, U. Contextual classification of LiDAR data and building object detection in urban areas. ISPRS J. Photogramm. Remote Sens. 2014, 87, 152–165. [Google Scholar] [CrossRef]
- Weinmann, M.; Jutzi, B.; Mallet, C. Sematic 3D scene interpretation: A framework combining optimal neighborhood size selection with relevant features. In Proceeding of the Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Zurich, Switzerland, 5–7 September 2014; Volume 2, pp. 181–188. [Google Scholar]
- Socher, R.; Huval, B.; Bhat, B.; Manning, C.D.; Ng, A.Y. Convolutional-recursive deep learning for 3D object classification. Adv. Neural Inf. Process. Syst. 2012, 656–664. [Google Scholar]
- Li, N.; Pfeifer, N.; Liu, C. Tensor-based sparse representation classification for Urban Airborne LiDAR points. Remote Sens. 2017, 9, 1216. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, L.; Tong, X.; Guo, B.; Zhang, L.; Xing, X. Discriminative-Dictionary-Learning-Based Multilevel Point-Cluster Features for ALS Point-Cloud Classification. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7309–7322. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, L.; Tan, Y.; Zhang, L.; Liu, F.; Zhong, R. Joint Discriminative Dictionary and Classifier Learning for ALS Point Cloud Classification. IEEE Trans. Geosci. Remote Sens. 2017, 56, 524–538. [Google Scholar] [CrossRef]
- Gu, Y.; Wang, Q.; Jia, X.; Benediktsson, J.A. A Novel MKL Model of Integrating LiDAR Data and MSI for Urban Area Classification. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5312–5326. [Google Scholar]
- Pfeifer, N.; Mandlburger, G.; Otepka, J.; Karel, W. OPALS—A framework for Airborne Laser Scanning data analysis. Comput. Environ. Urban Syst. 2014, 45, 125–136. [Google Scholar] [CrossRef]
- Inpho. Available online: https://geospatial.trimble.com/products-and-solutions/inpho (accessed on 30 January 2018).
- FugroViewer. Available online: https://www.fugro.com/about-fugro/our-expertise/technology/fugroviewer (accessed on 18 December 2017).
- Weinmann, M.; Jutzi, B.; Mallet, C. Feature relevance assessment for the semantic interpretation of 3D point cloud data. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Antalya, Turkey, 11–13 November 2013; Volume II-5/W2, pp. 313–318. [Google Scholar]
- Gressin, A.; Mallet, C.; David, N. Improving 3D LiDAR point cloud registration using optimal neighborhood knowledge. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Austria, 25 August–1 September 2012; Volume I-3, pp. 111–116. [Google Scholar]
- Höfle, B.; Mücke, W.; Dutter, M.; Rutzinger, M. Detection of building regions using airborne LiDAR—A new combination of raster and point cloud based GIS methods Study area and datasets. In Geospatial Crossroads @ GI_Forum ′09, Proceedings of the Geoinformatics Forum Salzburg, Geoinformatics on Stage, Heidelberg, Germany, 7–10 July 2009; Car, A., Griesebner, G., Strobl, J., Eds.; Wichmann Verlag: Heidelberg, Germany, 2009; pp. 66–75. [Google Scholar]
- Höfle, B.; Hollaus, M.; Hagenauer, J. Urban vegetation detection using radiometrically calibrated small-footprint full-waveform airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2012, 67, 134–147. [Google Scholar] [CrossRef]
- Pfeifer, N.; Mandlburger, G. LiDAR Data Filtering and DTM Generation. 2008. Available online: ftp://ftp.ecn.purdue.edu/jshan/Zproject/proofs/11/51423_C011_correctedProof.pdf (accessed on 29 January 2018).
- Glira, P.; Pfeifer, N.; Briese, C.; Ressl, C. A Correspondence Framework for ALS Strip Adjustments based on Variants of the ICP Algorithm. Photogramm. Fernerkund. Geoinf. 2015, 4, 0275–0289. [Google Scholar] [CrossRef]
- Landrieu, L.; Raguet, H.; Vallet, B.; Mallet, C.; Weinmann, M. A structured regularization framework for spatially smoothing semantic labelings of 3D point clouds. ISPRS J. Photogramm. Remote Sens. 2017, 132 (Suppl. C), 102–118. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Year | Data Used | CD Approach | CD Classes | ||
|---|---|---|---|---|---|---|
| ALS | Image | Maps | ||||
| Matikainen et al. [36] | 2004 | X | X | X | Post-classification | Building |
| Matikainen et al. [37] | 2010 | X | X | X | Post-classification | Building |
| Stal et al. [38] | 2013 | X | X | Post-classification | Building | |
| Malpica et al. [39] | 2013 | X | X | Post-classification | Building | |
| Matikainen et al. [40] | 2016 | X | X | X | Post-classification | Building |
| Matikainen et al. [41] | 2017 | X | X | X | Post-classification | Building, roads |
| Vosselman et al. [42] | 2004 | X | X | Post-classification | Building | |
| Tang et al. [43] | 2015 | X | X | Post-classification | Building | |
| Awrangjeb et al. [44] | 2015 | X | X | Post-classification | Building | |
| Choi et al. [45] | 2009 | X | Post-classification | Ground, vegetation, building | ||
| Xu et al. [46] | 2015b | X | Post-classification | Building | ||
| Teo et al. [47] | 2013 | X | Post-classification/DSM-based | Building | ||
| Murakami et al. [48] | 1999 | X | Pre-classification/DSM-based | Building | ||
| Pang et al. [49] | 2014 | X | Pre-classification/DSM-based | Building | ||
| Vu et al. [50] | 2004 | X | Pre-classification/DSM-based | Building | ||
| Zhang et al. [51] | 2014 | X | Pre-classification | Ground | ||
| Xu et al. [34,46] | 2015a | X | Pre-classification | Building, tree | ||
| Change Objects | Change Types | Description |
|---|---|---|
| Buildings | Unchanged high-building | The same high-building is in both epochs |
| Unchanged low-building | The same low-building is in both epochs | |
| New high-building | New building with height >15 m | |
| Lost high-building | Lost building with height >15 m | |
| New low-building | New building with height ≤15 m | |
| Lost low-building | Lost building with height ≤15 m | |
| New walls | Walls in new building | |
| Lost walls | Walls in lost building | |
| Unchanged walls | Walls in unchanged building | |
| Trees | New tree | New planted tree |
| Lost tree | Cut tree | |
| Unchanged trees | The same tree in both periods | |
| Ground | Unchanged ground | The same ground or absolute height differences ≤0.5 m |
| Change in height | Ground has absolute height differences >0.5 m | |
| New ground | Buildings changed to grounds | |
| Lost ground | Ground changed to buildings | |
| Water | Water | Water points |
| Change Types | Sample Points 2007 | Sample Points 2015 |
|---|---|---|
| Unchanged grounds | 698,323 | 639,465 |
| Unchanged low buildings | 181,022 | 169,015 |
| Unchanged high buildings | 443,891 | 463,812 |
| Unchanged walls | 44,504 | 43,796 |
| Lost walls | 9341 | - |
| New walls | - | 62,795 |
| New high building | - | 479,565 |
| Lost high building | 65,653 | - |
| New low building | - | 53,219 |
| Lost low building | 189,327 | - |
| Lost tree | 193,035 | - |
| New tree | - | 138,402 |
| Unchanged trees | 184,781 | 515,326 |
| Ground change in height | 113,662 | 85,766 |
| New ground | - | 51,919 |
| Lost ground | 373,161 | - |
| Water | 2400 | 40,703 |
| 2007 | UG | CG | UB | LB | UT | LT | Ref Sum | EOO | Comp |
| Ref_UG | 53.8 | 1.8 | 0.1 | 0 | 0.1 | 0 | 55.8 | 3.6 | 96.4 |
| Ref_CG | 3.6 | 10.1 | 0 | 0.1 | 0 | 0 | 13.8 | 26.7 | 73.3 |
| Ref_UB | 0.1 | 0 | 16.7 | 0.4 | 1.1 | 0.1 | 18.2 | 8.7 | 91.3 |
| Ref_LB | 0 | 0 | 0.2 | 2.9 | 0 | 0.1 | 3.1 | 8.6 | 91.4 |
| Ref_UT | 0 | 0 | 0.4 | 0 | 4.1 | 0.4 | 4.9 | 16.1 | 83.9 |
| Ref_LT | 0 | 0 | 0.1 | 0.1 | 0.5 | 3.4 | 4.1 | 18.2 | 81.8 |
| Sum | 57.5 | 12 | 17.4 | 3.5 | 5.8 | 3.9 | 100 | 0 | 100 |
| EOC | 6.4 | 15.6 | 4.2 | 17.6 | 29.3 | 13.2 | 0 | 0 | 100 |
| Corr | 93.6 | 84.4 | 95.8 | 82.4 | 70.7 | 86.8 | 100 | 100 | 0 |
| Overall Accuracy: 90.93 | |||||||||
| Total number of points: 8,542,450 | |||||||||
| 2015 | UG | CG | UB | NB | UT | NT | Ref_sum | EOO | Comp |
| Ref_UG | 48.3 | 0.5 | 0.1 | 0 | 0 | 0 | 48.9 | 1.3 | 98.7 |
| Ref_CG | 0.9 | 10 | 0.1 | 0.1 | 0 | 0 | 11.0 | 9.1 | 90.9 |
| Ref_UB | 0 | 0 | 16.5 | 0.2 | 0.9 | 0 | 17.7 | 6.9 | 93.1 |
| Ref_NB | 0 | 0.2 | 0.1 | 4.6 | 0.1 | 0 | 5.0 | 8.4 | 91.6 |
| Ref_UT | 0 | 0 | 0.3 | 0.2 | 11.1 | 1.1 | 12.8 | 12.9 | 87.1 |
| Ref_NT | 0 | 0 | 0.1 | 0.1 | 1.1 | 1.6 | 2.8 | 43.5 | 56.5 |
| Sum | 49.2 | 10.8 | 17.1 | 5.3 | 13.2 | 2.7 | 98.2 | 0 | 100 |
| EOC | 1.8 | 6.9 | 3.6 | 12.4 | 15.9 | 42 | 0 | 0 | 100 |
| Corr | 98.2 | 93.1 | 96.4 | 87.6 | 84.1 | 58.0 | 100 | 100 | 0 |
| Overall Accuracy: 92.05 | |||||||||
| Total number of points: 8,636,900 | |||||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, T.H.G.; Ressl, C.; Pfeifer, N. Integrated Change Detection and Classification in Urban Areas Based on Airborne Laser Scanning Point Clouds. Sensors 2018, 18, 448. https://doi.org/10.3390/s18020448
Tran THG, Ressl C, Pfeifer N. Integrated Change Detection and Classification in Urban Areas Based on Airborne Laser Scanning Point Clouds. Sensors. 2018; 18(2):448. https://doi.org/10.3390/s18020448
Chicago/Turabian StyleTran, Thi Huong Giang, Camillo Ressl, and Norbert Pfeifer. 2018. "Integrated Change Detection and Classification in Urban Areas Based on Airborne Laser Scanning Point Clouds" Sensors 18, no. 2: 448. https://doi.org/10.3390/s18020448
APA StyleTran, T. H. G., Ressl, C., & Pfeifer, N. (2018). Integrated Change Detection and Classification in Urban Areas Based on Airborne Laser Scanning Point Clouds. Sensors, 18(2), 448. https://doi.org/10.3390/s18020448