Probabilities of False Alarm for Vital Sign Detection on the Basis of a Doppler Radar System

 ,
, 
Abstract
:1. Introduction
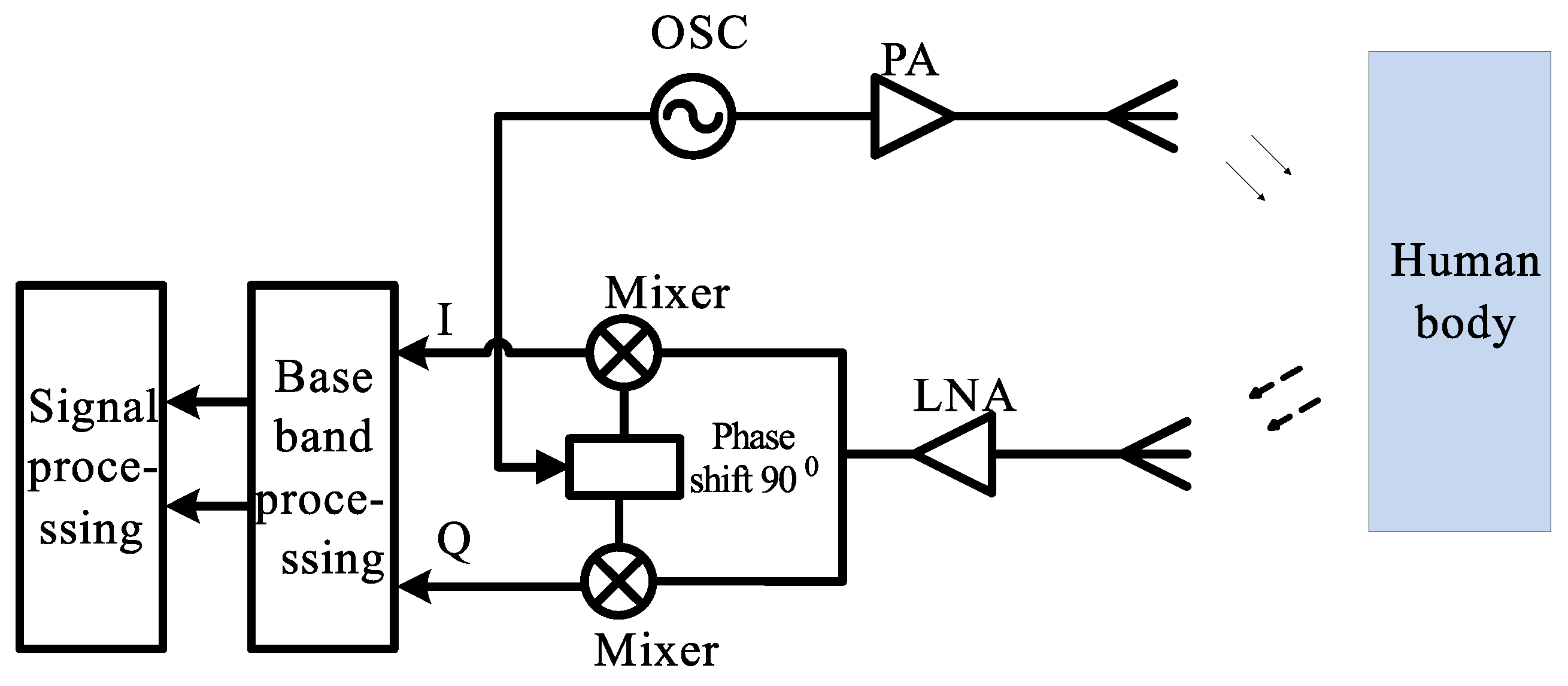
2. System Model
3. SNR Analysis
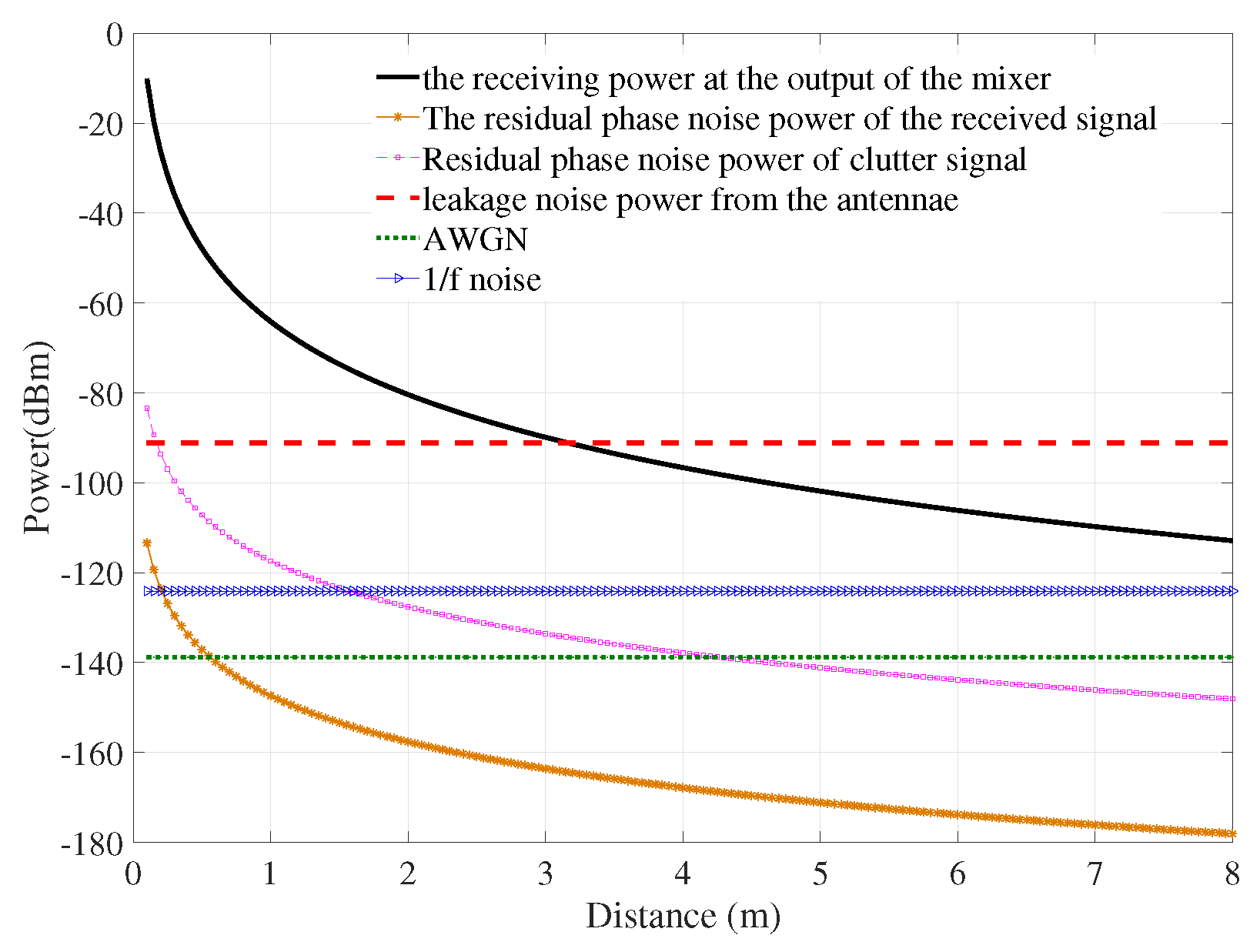
3.1. Signal Power
3.2. Residual Phase Noise
3.3. Additive White Gaussian Noise
3.4. Noise
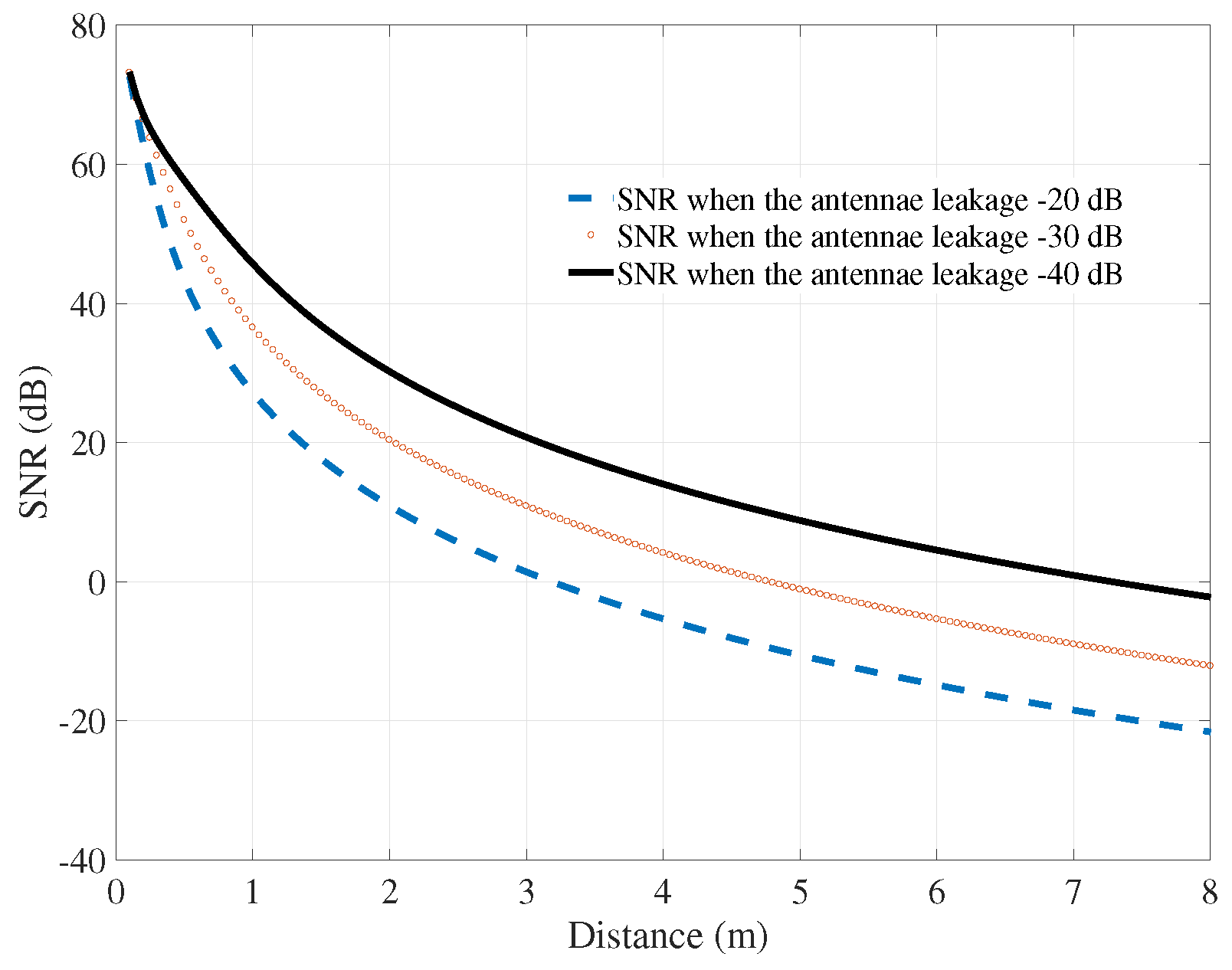
3.5. SNR
4. Detection and False Alarm Probabilities
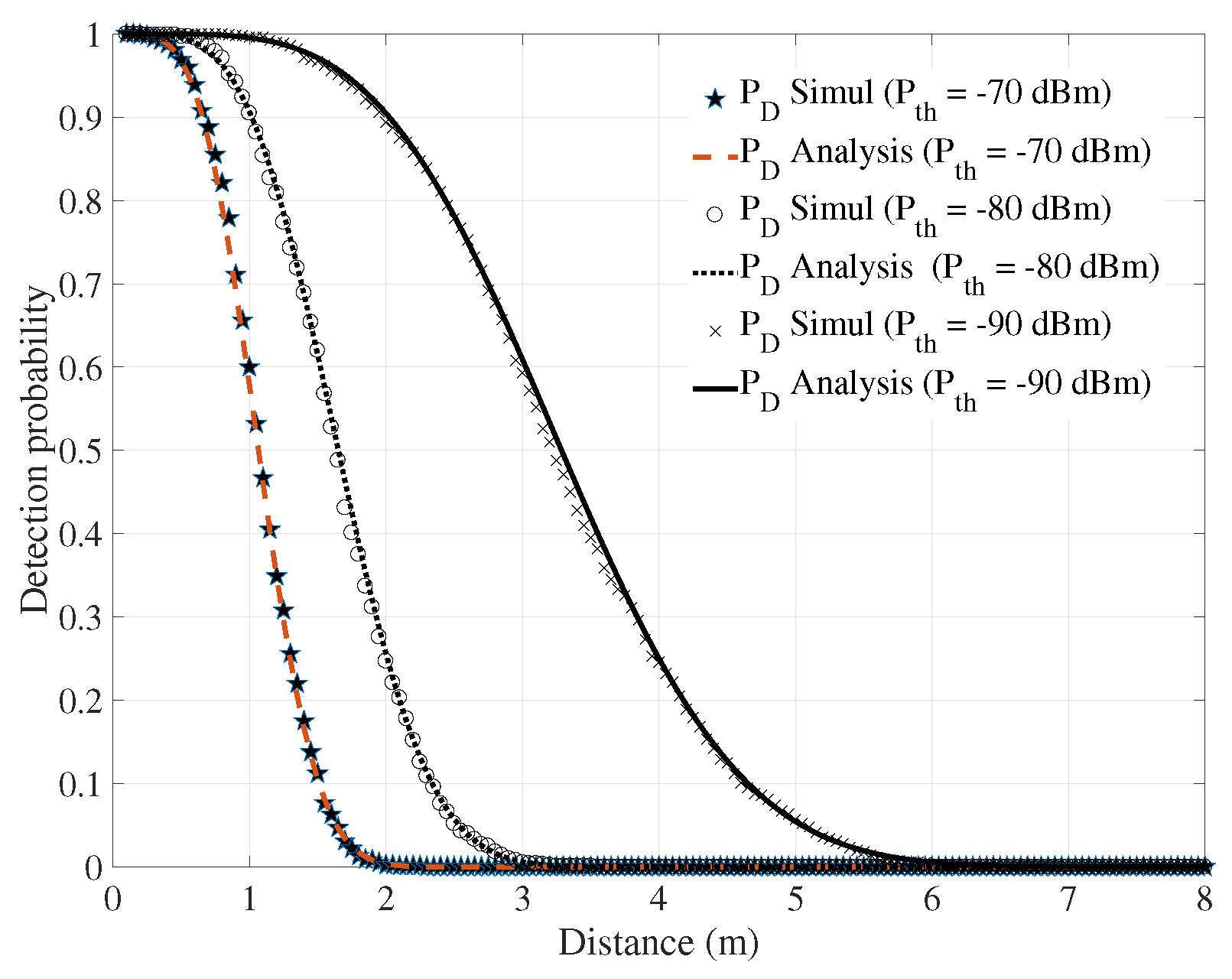
4.1. Detection Probability
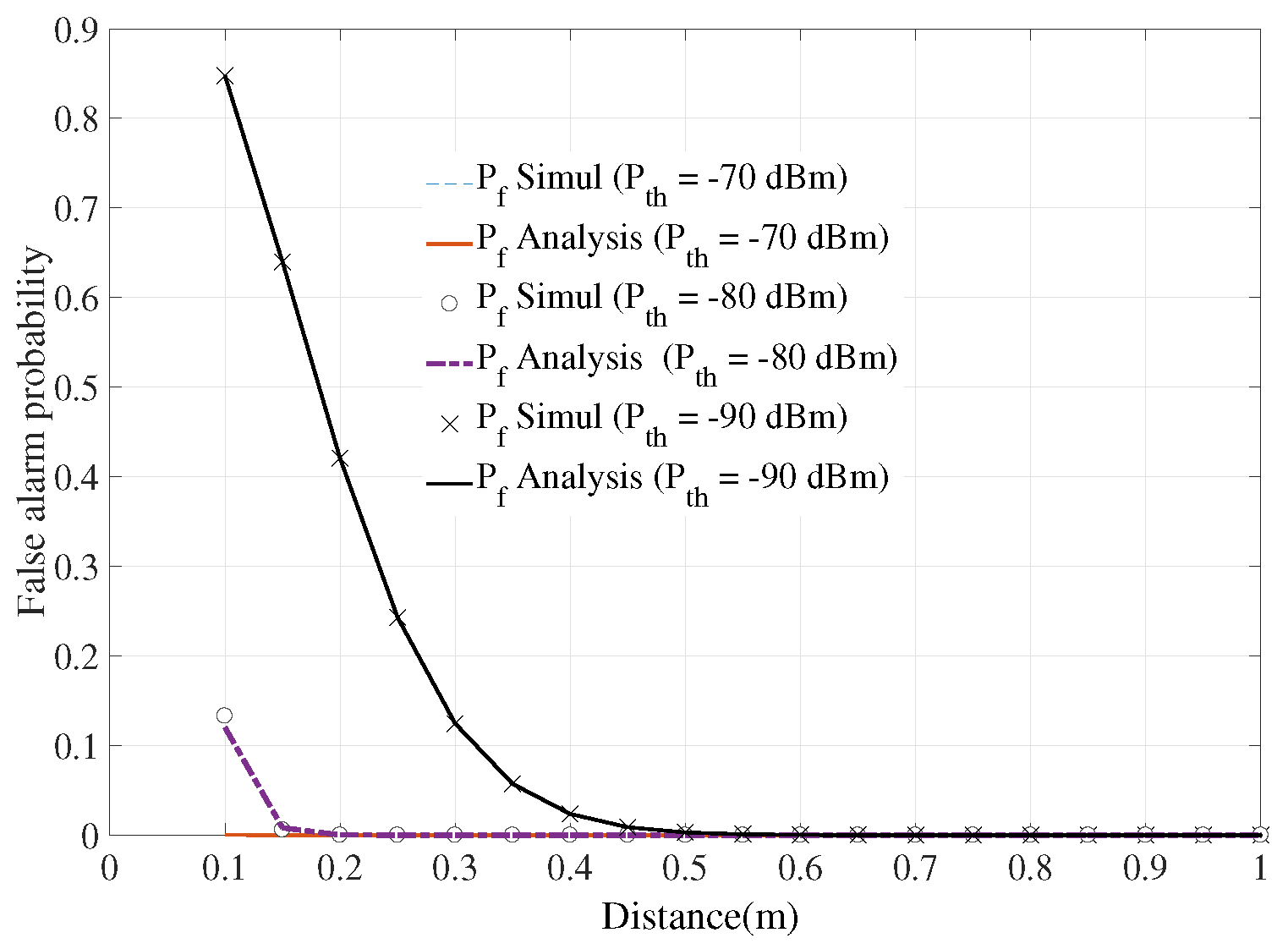
4.2. False Alarm Probability
5. Simulation Result
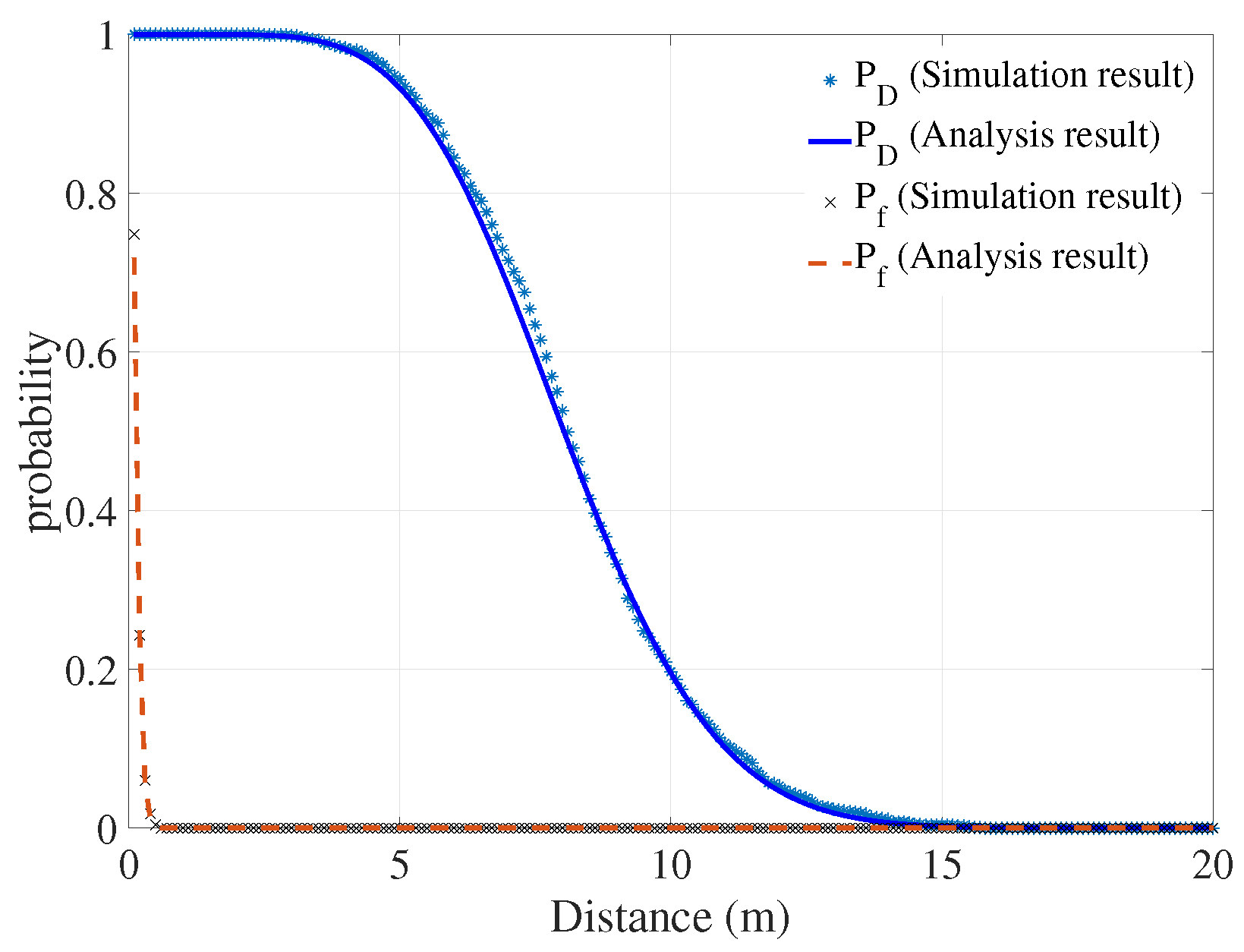
5.1. SNR and Detection/False Alarm Probabilities under Rayleigh Fading Channel
5.2. Detection/False Alarm Probabilities of the System under the Nakagami-2 Channel Model
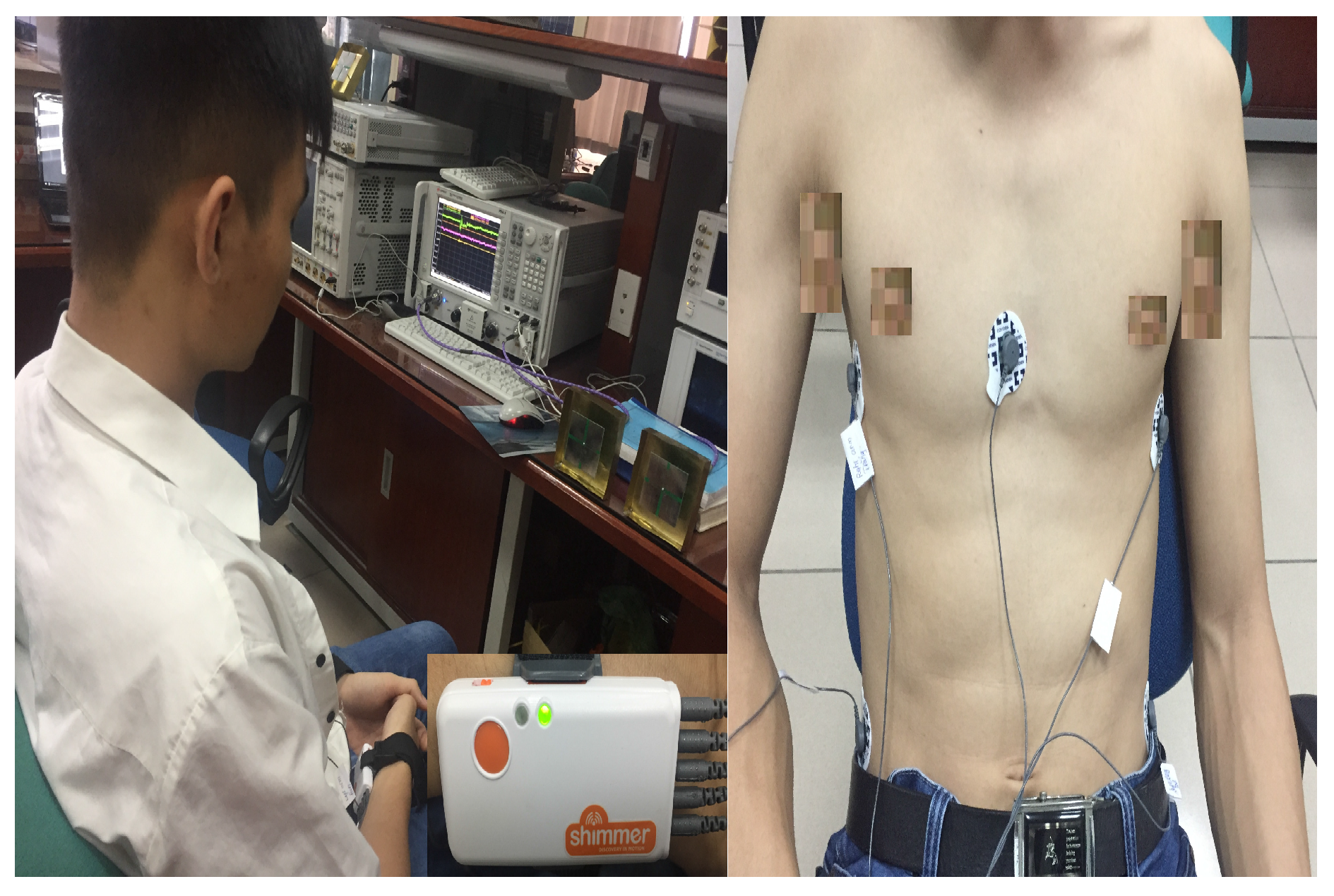
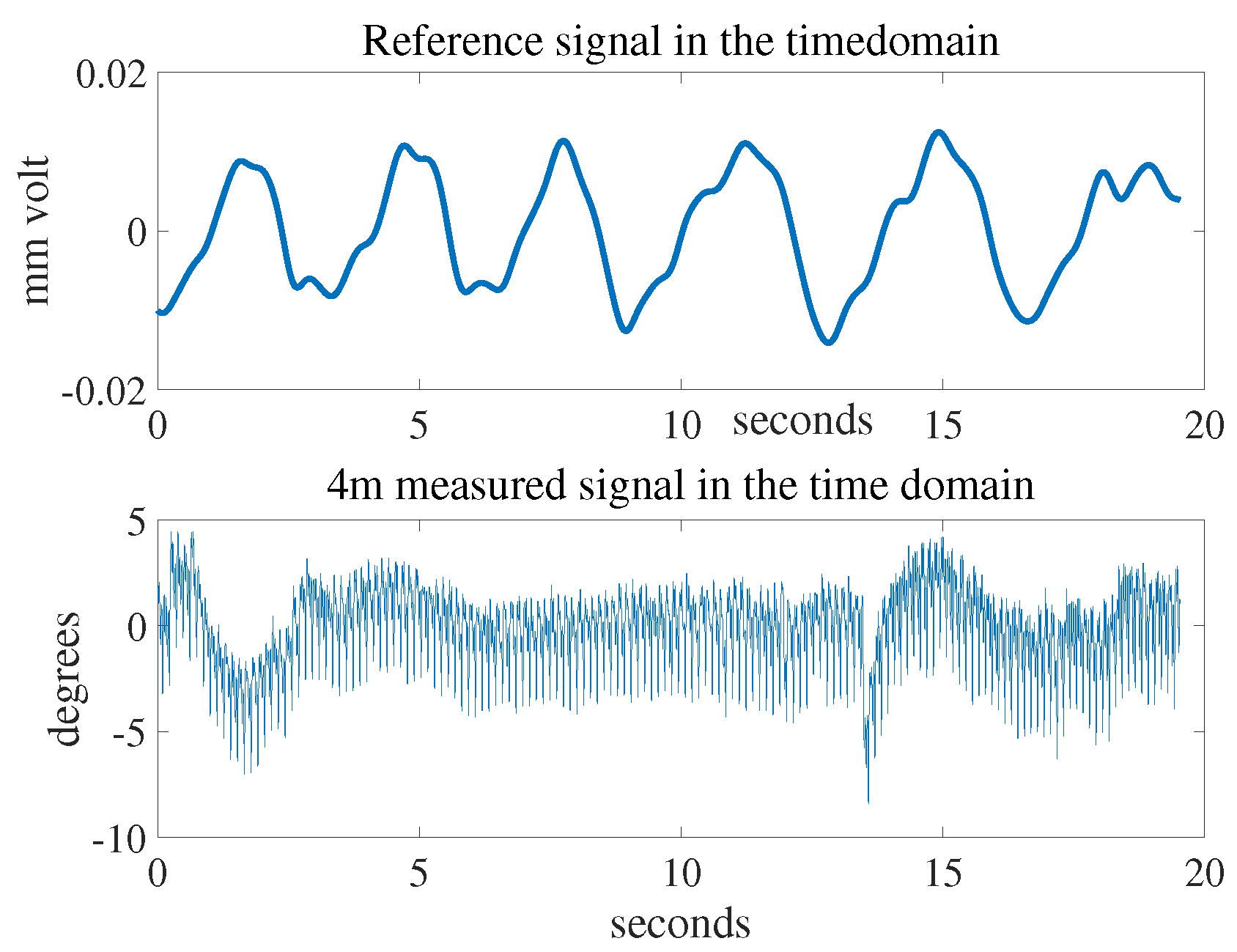
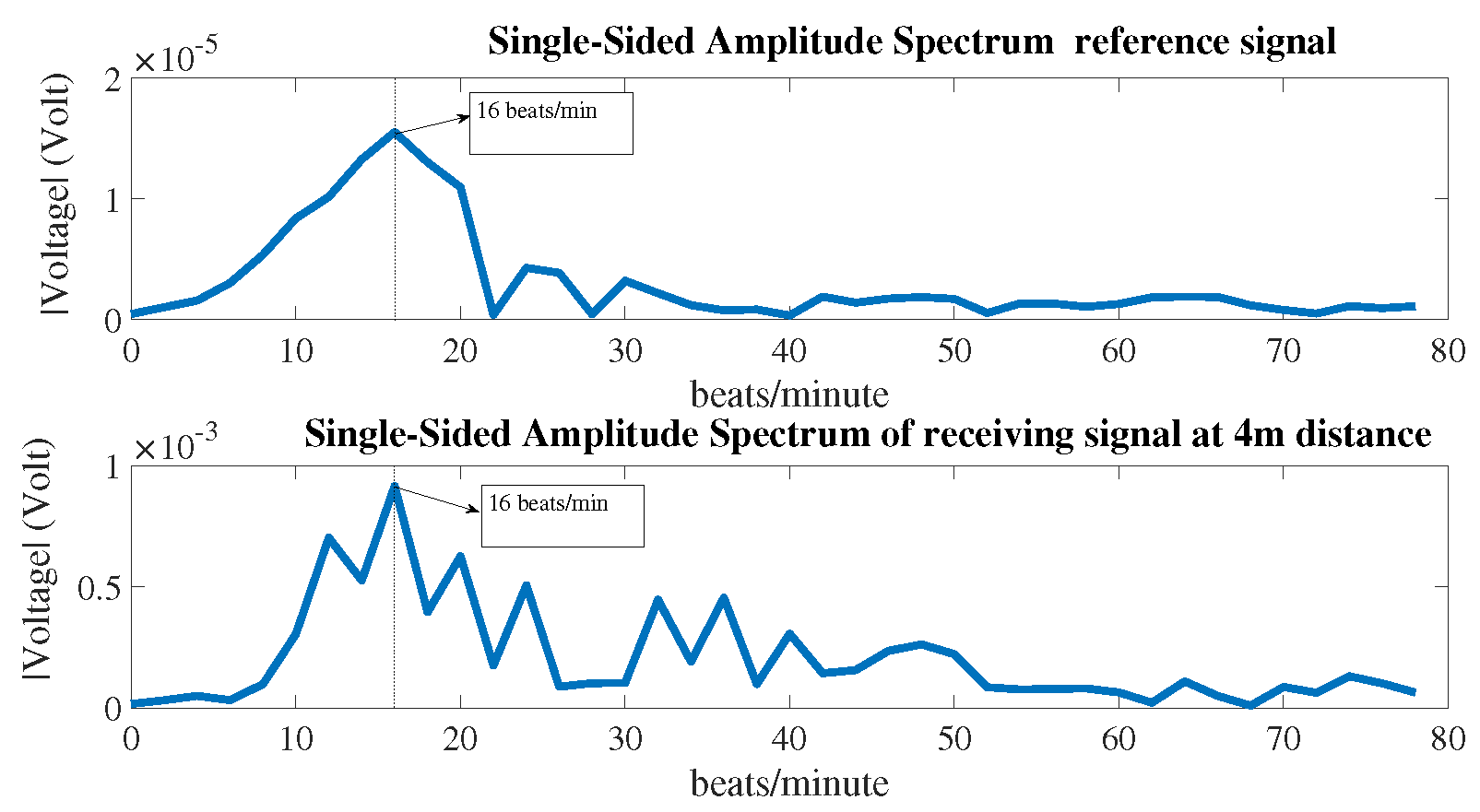
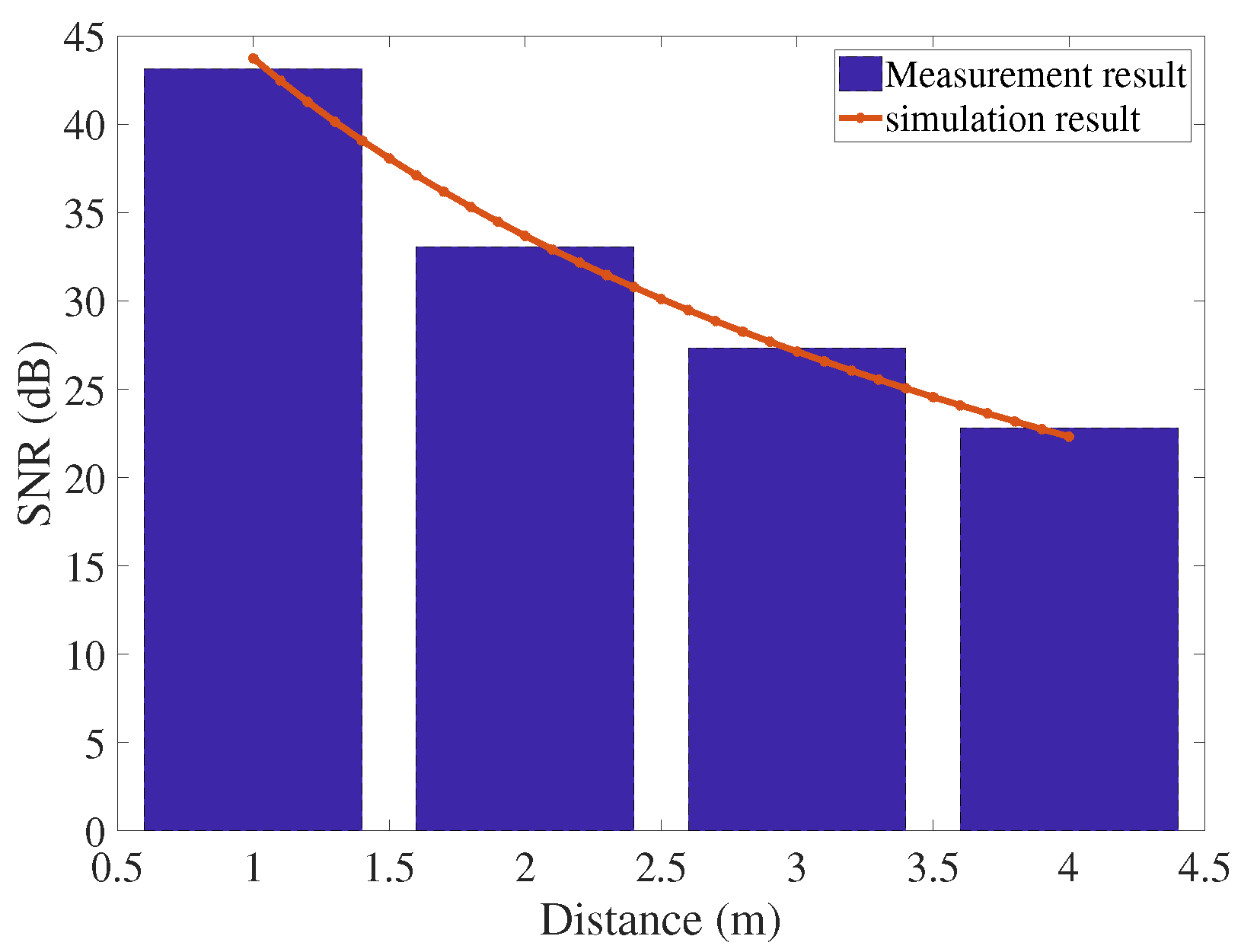
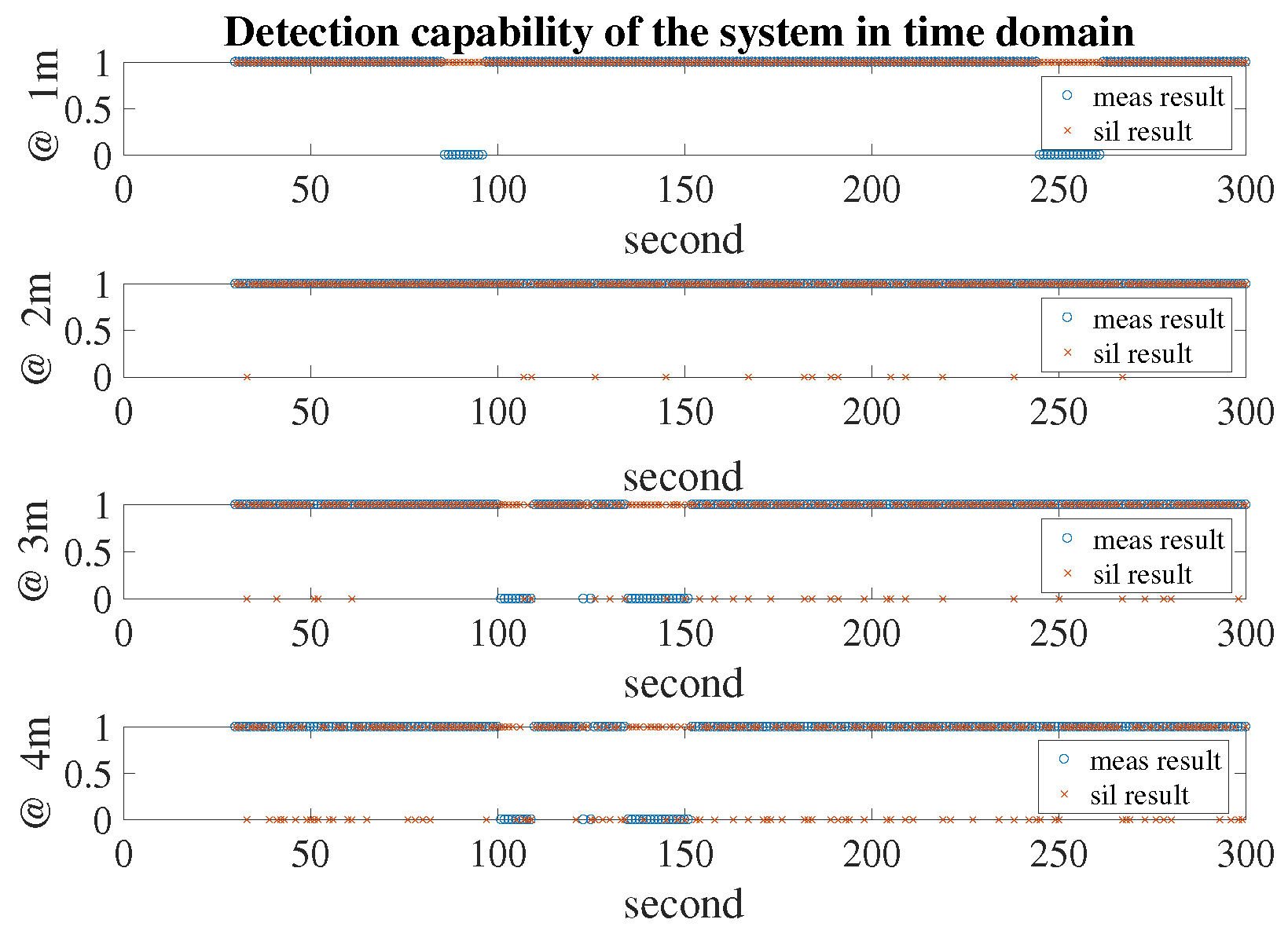
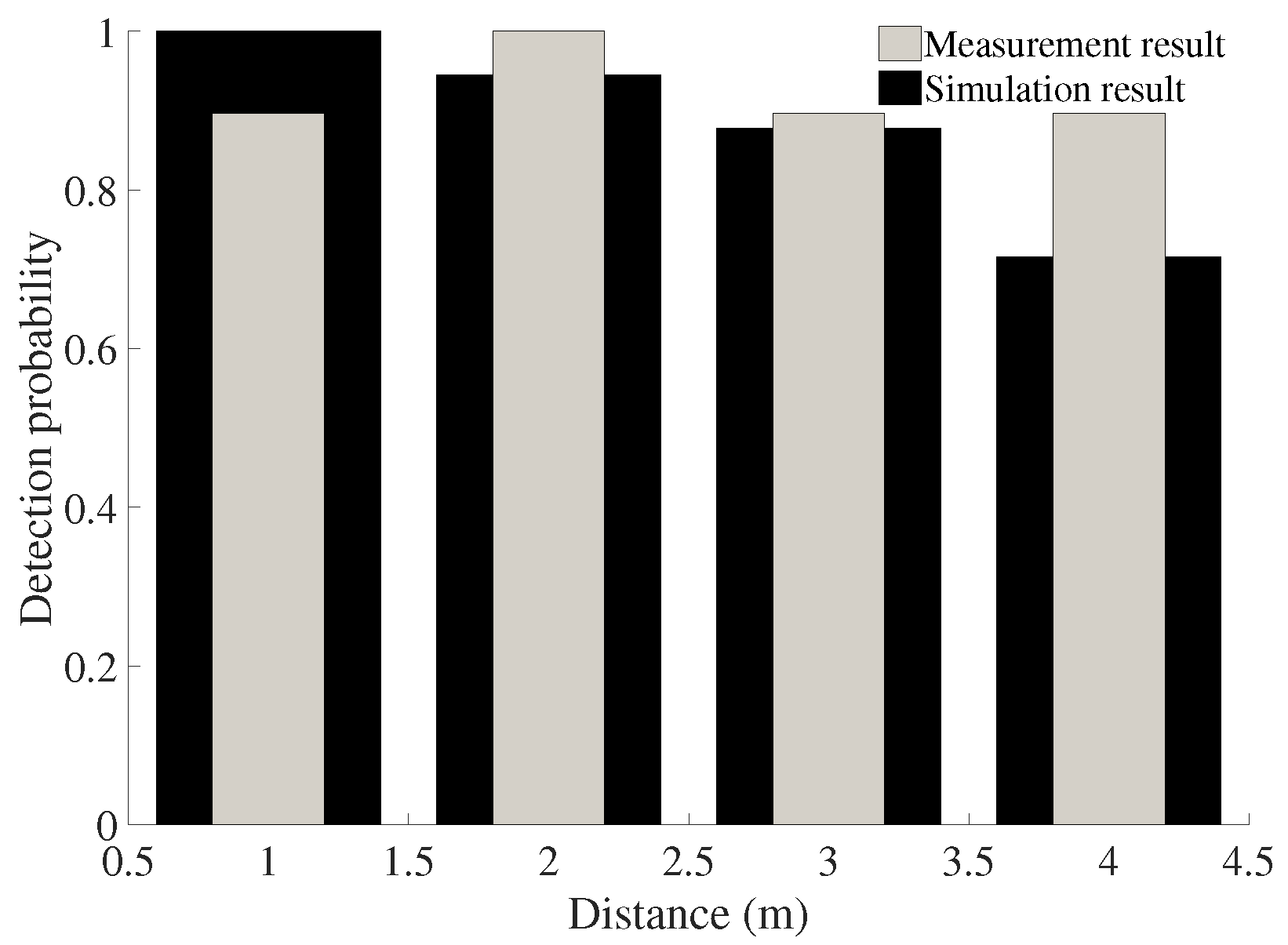
6. Measurement Results
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Caro, C.; Bloice, J. Contactless apnoea detector based on radar. Lancet 1971, 298, 959–961. [Google Scholar] [CrossRef]
- McEwan, T.E. Body Monitoring and Imaging Apparatus and Method. US Patent 5,573,012, 12 November 1996. [Google Scholar]
- Bilich, C.G. Bio-medical sensing using ultra wideband communications and radar technology: A feasibility study. In Proceedings of the Pervasive Health Conference and Workshops, Innsbruck, Austria, 29 November–1 December 2006; pp. 1–9. [Google Scholar]
- Cianca, E.; Gupta, B. FM-UWB for communications and radar in medical applications. Wirel. Pers. Commun. 2009, 51, 793–809. [Google Scholar] [CrossRef]
- Zito, D.; Pepe, D.; Mincica, M.; Zito, F.; Tognetti, A.; Lanatà, A.; De Rossi, D. SoC CMOS UWB pulse radar sensor for contactless respiratory rate monitoring. IEEE Trans. Biomed. Circuits Syst. 2011, 5, 503–510. [Google Scholar] [CrossRef] [PubMed]
- Pisa, S.; Pittella, E.; Piuzzi, E. A survey of radar systems for medical applications. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 64–81. [Google Scholar] [CrossRef]
- Chan, C.H.; Chou, C.C.; Chuang, H.R. Integrated Packaging Design of Low-Cost Bondwire Interconnection for 60-GHz CMOS Vital-Signs Radar Sensor Chip With Millimeter-Wave Planar Antenna. IEEE Trans. Compon. Packag. Manuf. Technol. 2018, 8, 177–185. [Google Scholar] [CrossRef]
- Branković, V.; Jovanović, P.; Mihajlović, V.; Savić, M.; Tasovac, D. MM-Wave Radar Driver Fatigue Sensor Apparatus. US Patent 9,862,271, 9 January 2018. [Google Scholar]
- Choi, J.W.; Nam, S.S.; Cho, S.H. Multi-Human Detection Algorithm based on an Impulse Radio Ultra-Wideband Radar System. IEEE Access 2016, 4, 10300–10309. [Google Scholar] [CrossRef]
- Droitcour, A.D.; Boric-Lubecke, O.; Kovacs, G.T. Signal-to-noise ratio in Doppler radar system for heart and respiratory rate measurements. IEEE Trans. Microw. Theory Tech. 2009, 57, 2498–2507. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, H.; Ye, S.; Fang, G.; Gulliver, T.A. Improved denoising method for through-wall vital sign detection using UWB impulse radar. Digit. Signal Process. 2018, 74, 72–93. [Google Scholar] [CrossRef]
- Chen, K.M.; Huang, Y.; Zhang, J.; Norman, A. Microwave life-detection systems for searching human subjects under earthquake rubble or behind barrier. IEEE Trans. Biomed. Eng. 2000, 47, 105–114. [Google Scholar] [CrossRef] [PubMed]
- JalaliBidgoli, F.; Moghadami, S.; Ardalan, S. A Compact Portable Microwave Life-Detection Device for Finding Survivors. IEEE Embed. Syst. Lett. 2016, 8, 10–13. [Google Scholar] [CrossRef]
- Mishra, M.K.; Sood, N.; Sharma, A.K. Efficient BER Analysis of OFDM System over Nakagami-m Fading Channel. Int. J. Adv. Sci. Technol. 2011, 37, 37–46. [Google Scholar]
- Alouini, M.S.; Simon, M.K. Performance of coherent receivers with hybrid SC/MRC over Nakagami-m fading channels. IEEE Trans. Veh. Technol. 1999, 48, 1155–1164. [Google Scholar] [CrossRef]
- Suraweera, H.A.; Smith, P.J.; Armstrong, J. Outage probability of cooperative relay networks in Nakagami-m fading channels. IEEE Commun. Lett. 2006, 10. [Google Scholar] [CrossRef]
- Kuo, H.C.; Lin, C.C.; Yu, C.H.; Lo, P.H.; Lyu, J.Y.; Chou, C.C.; Chuang, H.R. A Fully Integrated 60-GHz CMOS Direct-Conversion Doppler Radar RF Sensor with Clutter Canceller for Single-Antenna Noncontact Human Vital-Signs Detection. IEEE Trans. Microw. Theory Tech. 2016, 64, 1018–1028. [Google Scholar] [CrossRef]
- Girbau, D.; Lazaro, A.; Ramos, A.; Villarino, R. Remote sensing of vital signs using a doppler radar and diversity to overcome null detection. IEEE Sens. J. 2012, 12, 512–518. [Google Scholar] [CrossRef]
- Mahafza, B.R. Radar Systems Analysis and Design Using MATLAB Third Edition; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Van, N.T.P.; Hasan, S.F.; Gui, X.; Mukhopadhyay, S.; Tran, H. Three-Step Two-Way Decode and Forward Relay With Energy Harvesting. IEEE Commun. Lett. 2017, 21, 857–860. [Google Scholar] [CrossRef]
- Jang, B.J.; Wi, S.H.; Yook, J.G.; Lee, M.Q.; Lee, K.J. Wireless bio-radar sensor for heartbeat and respiration detection. Prog. Electromagn. Res. C 2008, 5, 149–168. [Google Scholar]
- Droitcour, A.D.; Boric-Lubecke, O.; Lubecke, V.M.; Lin, J.; Kovacs, G.T. Range correlation and I/Q performance benefits in single-chip silicon Doppler radars for noncontact cardiopulmonary monitoring. IEEE Trans. Microw. Theory Tech. 2004, 52, 838–848. [Google Scholar] [CrossRef]
- Budge, M.; Burt, M. Range correlation effects on phase and amplitude noise. In Proceedings of the Southeastcon’93, Charlotte, NC, USA, 4–7 April 1993. [Google Scholar]
- Kreh, M. Bessel Functions: Project for the Penn State—Gttingen Summer School on Number Theory. 2012. Available online: http://www.math.psu.edu/papikian/Kreh.pdf (accessed on 29 July 2012).
- Withers, C.S.; Nadarajah, S. On the product of gamma random variables. Qual. Quant. 2013, 47, 545–552. [Google Scholar] [CrossRef]
- Jeffrey, A.; Zwillinger, D. Table of Integrals, Series, and Products; Academic Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Grandjean, G.; Baghdadi, N.; Paillou, P.; Dreuillet, P.; Dubois, P.; Souyris, J.; Achache, J. Radar penetration in soils: Towards a new system for subsurface Earth observation. In Proceedings of a CEOS SAR Workshop, Toulouse, France, 26–29 October 1999; European Space Agency and CNES: Paris, France, 2000; Volume 450, p. 267. [Google Scholar]
- Tariq, A. Vital Signs Monitoring Using Doppler Radar and on-Body Antennas. Ph.D. Thesis, University of Birmingham, Birmingham, UK, 2013. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value |
|---|---|---|
| Power of transmitter | 0 dBm | |
| Transmitting antenna gain | 5 dBi | |
| Receiving antenna gain | 5 dBi | |
| Gain of the receiver | 10 dB | |
| Radiated efficiency of receiving antenna | 0.8 | |
| Radiated efficiency of transmitting antenna | 0.8 | |
| r | Reflection coefficient of the human body | 0.5 |
| RCS of the human’s chest | 500 | |
| Received noise figure | 6 dB | |
| power noise power at 1 Hz | dBm/Hz | |
| T | Absolute noise temperature | 300 |
| High frequency | 5 Hz | |
| Low frequency | 0.1 Hz | |
| Phase noise at 1 Hz intercept | 60 dB/Hz | |
| Leakage between transmitting and receiving antennae | dB | |
| Path loss | 2 |
| Object | Breathing Rate | SNR | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ref | 1 m | 2 m | 3 m | 4 m | 1 m | 2 m | 3 m | 4 m | |||||
| Sim. | Meas. | Sim. | Meas. | Sim. | Meas. | Sim. | Meas. | ||||||
| 1 | 15 | 16 | 17 | 18 | 18 | 43.73 | 43.37 | 33.67 | 21.76 | 27.12 | 13.5 | 22.31 | 15.77 |
| 2 | 16 | 17 | 15 | 18 | 16 | 43.73 | 43.13 | 33.67 | 33.03 | 27.12 | 27.32 | 22.31 | 21.77 |
| 3 | 16 | 18 | 18 | 19 | 17 | 43.73 | 40.11 | 33.67 | 40.44 | 27.12 | 30.65 | 22.31 | 27.08 |
| 4 | 17 | 18 | 16 | 17 | 13 | 43.73 | 66.25 | 33.67 | 43.19 | 27.12 | 24.55 | 22.31 | 19.55 |
| 5 | 16 | 18 | 16 | 17 | 16 | 43.73 | 34.09 | 33.67 | 44.56 | 27.12 | 27.12 | 22.31 | 18.65 |
| Mean values | 16 | 17.4 | 16.4 | 17.8 | 16 | 43.73 | 45.39 | 33.67 | 36.59 | 27.12 | 24.62 | 22.31 | 20.56 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phuoc Van, N.T.; Tang, L.; Mukhopadhyay, S.C.; Nguyen, D.M.; Hasan, F. Probabilities of False Alarm for Vital Sign Detection on the Basis of a Doppler Radar System. Sensors 2018, 18, 694. https://doi.org/10.3390/s18030694
Phuoc Van NT, Tang L, Mukhopadhyay SC, Nguyen DM, Hasan F. Probabilities of False Alarm for Vital Sign Detection on the Basis of a Doppler Radar System. Sensors. 2018; 18(3):694. https://doi.org/10.3390/s18030694
Chicago/Turabian StylePhuoc Van, Nguyen Thi, Liqiong Tang, Subhas Chandra Mukhopadhyay, Duc Minh Nguyen, and Faraz Hasan. 2018. "Probabilities of False Alarm for Vital Sign Detection on the Basis of a Doppler Radar System" Sensors 18, no. 3: 694. https://doi.org/10.3390/s18030694
APA StylePhuoc Van, N. T., Tang, L., Mukhopadhyay, S. C., Nguyen, D. M., & Hasan, F. (2018). Probabilities of False Alarm for Vital Sign Detection on the Basis of a Doppler Radar System. Sensors, 18(3), 694. https://doi.org/10.3390/s18030694