Auto-Calibration and Fault Detection and Isolation of Skewed Redundant Accelerometers in Measurement While Drilling Systems


Abstract
:1. Introduction
2. System Model
3. Auto-Calibration of the Accelerometers
4. FDI and Optimal SRAMWD Structure
- Initial auto-calibration of the combinations of three sensors from four redundant accelerometers, assuming the use of three sensors in each case and determining the calibration coefficients in each case.
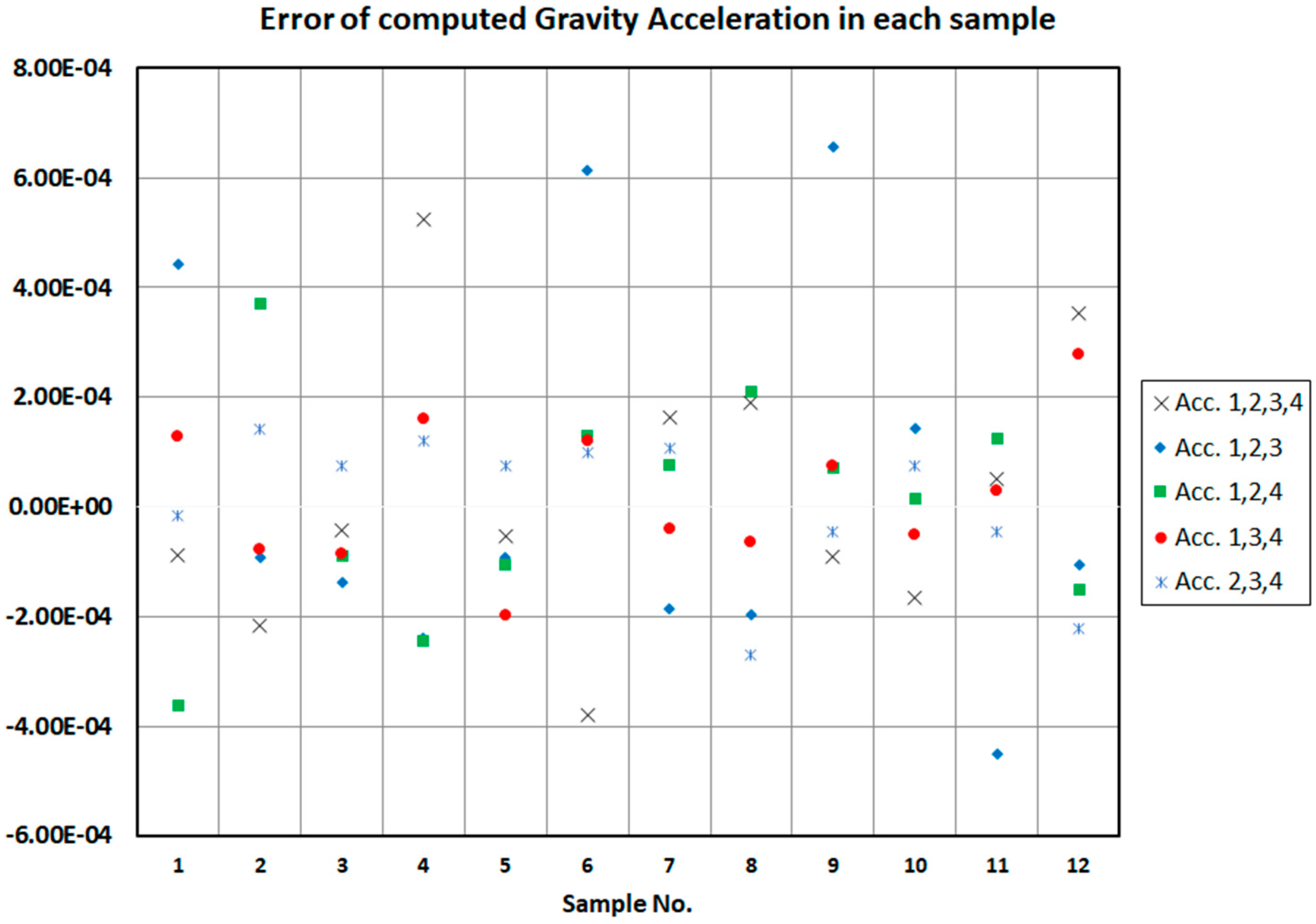
- Calculation of the Earth’s gravitational acceleration using the redundant accelerometers of skewed structure on each sample of data.
- If there is an overlimit difference between the calculated gravitational acceleration and the actual gravitational acceleration, sample more data.
- Calculate the mean error in the gravitational acceleration calculation in these samples of data.
- Fault diagnosis by checking acceptable limit for error is defined in Equation (15).
- In fault diagnosis, calculate the MAE of gravitational acceleration with different combinations of three sensors, assuming the use of three accelerometers out of four available ones and considering the calibration coefficients for each case, are defined in Equations (26)–(29).
- Detect the faulty accelerometer by checking the limit condition of the difference between the MAE of accelerations and the real amount of gravitational acceleration.
- Isolate and remove the faulty accelerometer from the calculation.
- Checking the MAE condition limit of the calculated gravitational acceleration error using the remaining correct accelerometers.
- If necessary, perform a new auto-calibration based on the remaining correct accelerometers and calculate the calibration coefficients of the correct accelerometers.
- Continue the process with the correct accelerometers.
5. Experimental Results
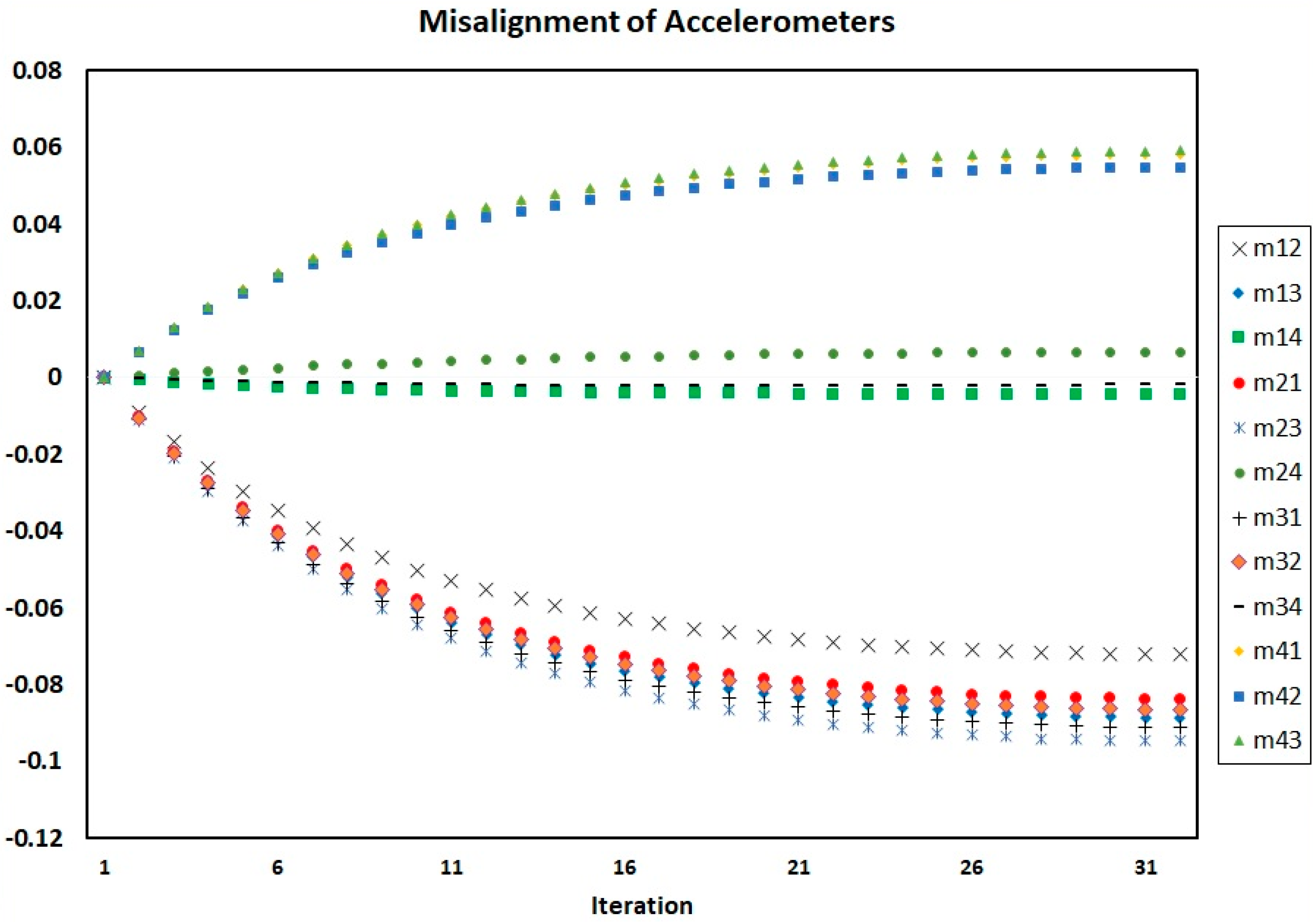
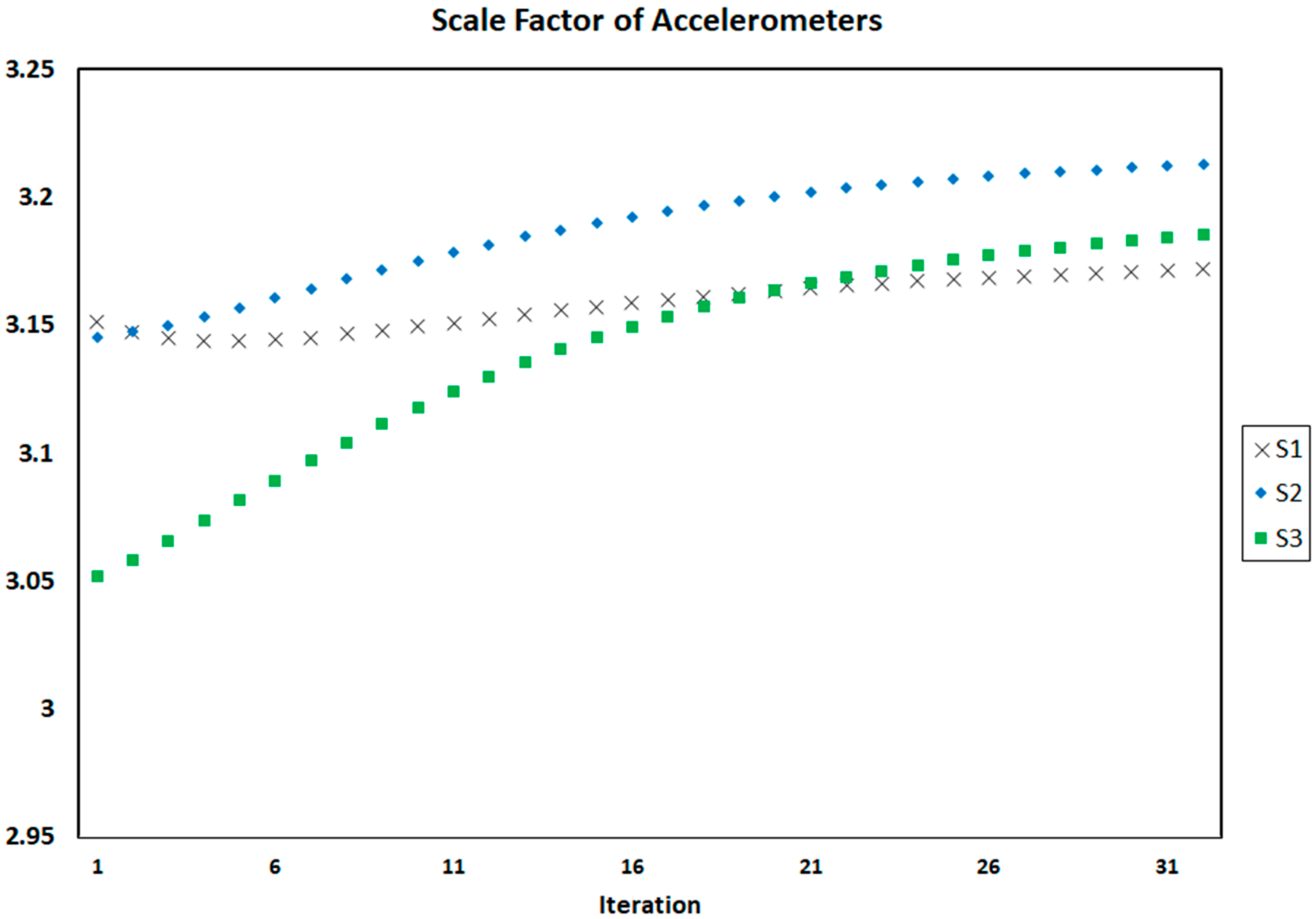
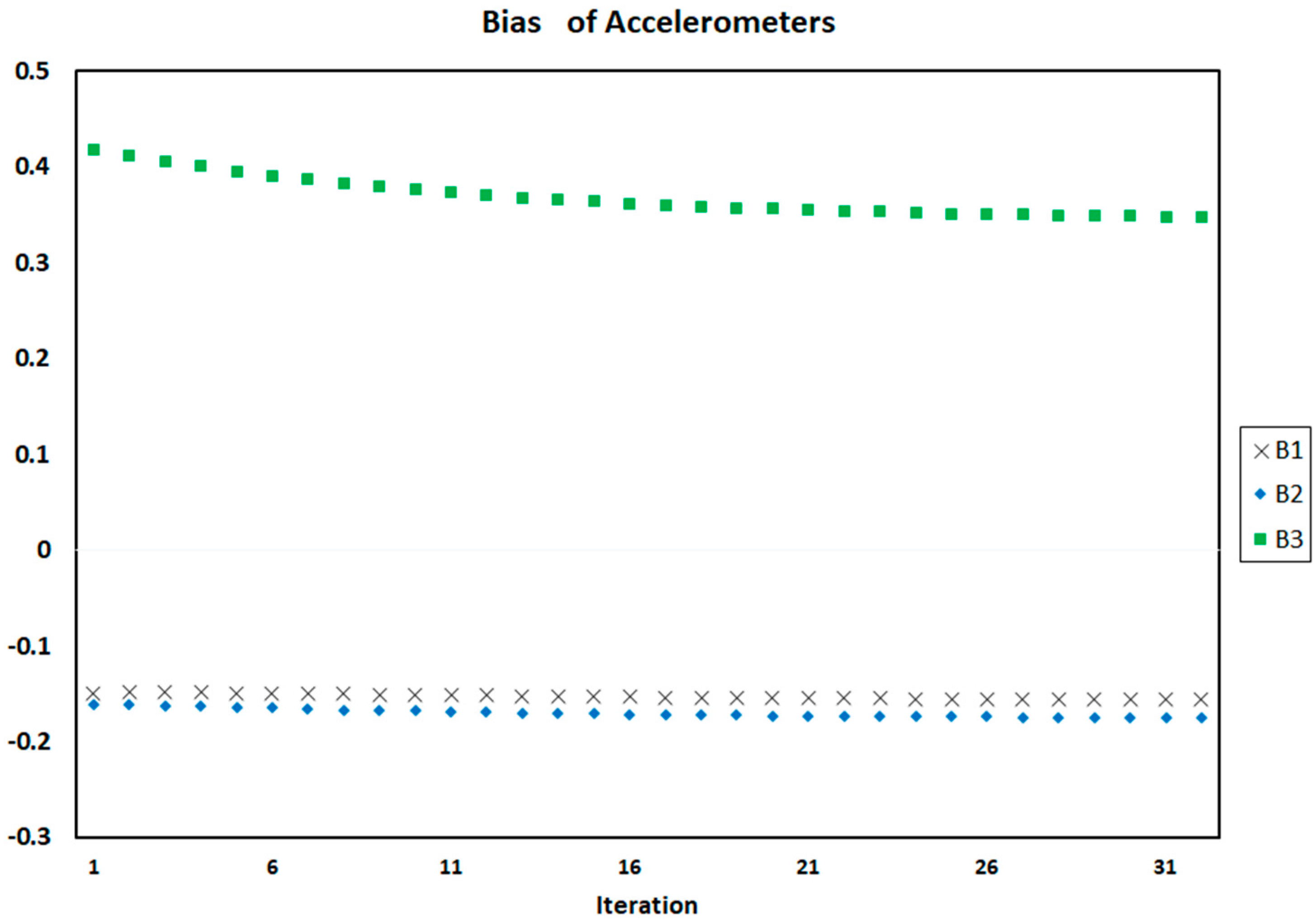
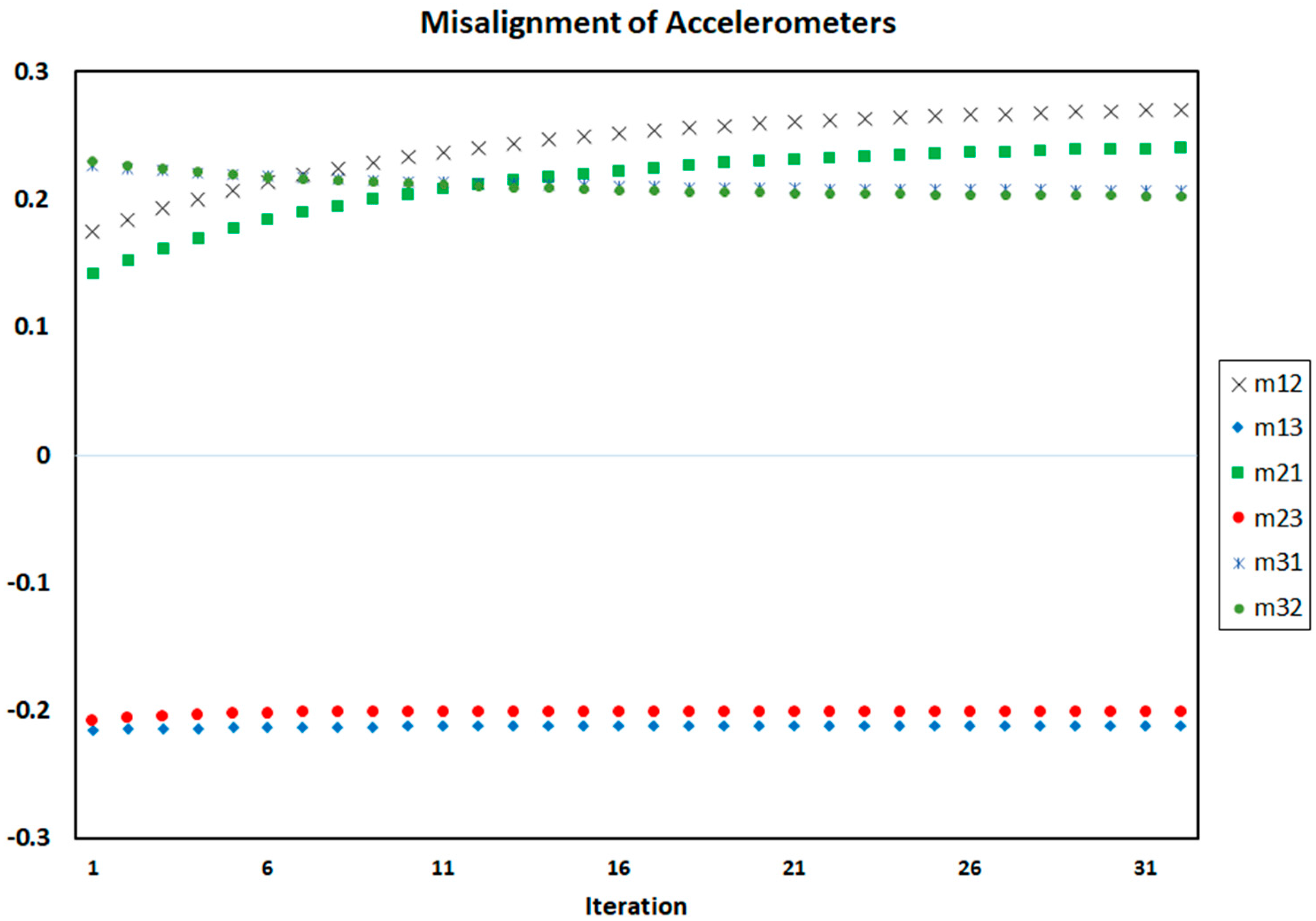
5.1. Auto-Calibration of SRAMWD
5.2. FDI in SRAMWD
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, C.; Lin, T. A long-term performance enhancement method for FOG-based measurement while drilling. Sensors 2016, 16, 1186. [Google Scholar] [CrossRef] [PubMed]
- Moosavi, S.M.S.; Moaveni, B.; Moshiri, B.; Arvan, M.R. Error Analysis in Accelerometers Calibration of Measurement while Drilling Instrument used in Directional Drilling Operations. Modares J. Electr. Eng. 2014, 13, 69–76. [Google Scholar]
- Waegli, A.; Guerrier, S.; Skaloud, J. Redundant MEMS-IMU Integrated with GPS for Performance Assessment in Sports. In Proceedings of the 2008 IEEE/ION on Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 1260–1268. [Google Scholar]
- Neering, J.; Fischer, C.; Bordier, M.; Maïzi, N. Optimal sensor configuration for passive position estimation. In Proceedings of the 2008 IEEE/ION on Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 951–960. [Google Scholar]
- Jafari, M. Optimal redundant sensor configuration for accuracy increasing in space inertial navigation system. Aerosp. Sci. Technol. 2015, 47, 467–472. [Google Scholar] [CrossRef]
- Song, J.W.; Park, C.G. Optimal Configuration of Redundant Inertial Sensors Considering Lever Arm Effect. IEEE Sens. J. 2016, 16, 3171–3180. [Google Scholar] [CrossRef]
- Jia, H. Data Fusion Methodologies for Multisensor Aircraft Navigation Systems. Ph.D. Thesis, Cranfield University, Cranfield, UK, 2004. [Google Scholar]
- Shim, D.-S.; Yang, C.-K. Optimal configuration of redundant inertial sensors for navigation and FDI performance. Sensors 2010, 10, 6497–6512. [Google Scholar] [CrossRef] [PubMed]
- Ye, L.; Su, SW. Optimum Experimental Design applied to MEMS accelerometer calibration for 9-parameter auto-calibration model. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 Aug 2015. [Google Scholar]
- Ye, L.; Argha, A.; Celler, B.G.; Nguyen, H.T.; Su, S.W. Online auto-calibration of triaxial accelerometer with time-variant model structures. Sens. Actuators A Phys. 2017, 266, 294–307. [Google Scholar] [CrossRef]
- Li, Z.; Duan, F. Low Cost and Automatic Calibration for MEMS Gyroscope. In Proceedings of the 2012 Spring Congress on Engineering and Technology (S-CET), Xi’an, China, 27–30 May 2012. [Google Scholar]
- Frosio, I.; Pedersini, F.; Borghese, N.A. Autocalibration of MEMS Accelerometers. In Advanced Mechatronics and MEMS Devices; Zhang, D., Ed.; Springer: New York, NY, USA, 2013; pp. 53–88. [Google Scholar]
- Brage, S.; da Silva, I.C.; Trenell, M.I.; White, T.; Wareham, N.J.; van Hees, V.T.; Fang, Z.; Langford, J.; Assah, F.; Mohammad, A. Autocalibration of accelerometer data for free-living. Int. J. Epidemiol. 2014, 117, 738–744. [Google Scholar]
- Glueck, M.; Oshinubi, D.; Schopp, P.; Manoli, Y. Real-time autocalibration of MEMS accelerometers. IEEE Trans. Instrum. Meas. 2014, 63, 96–105. [Google Scholar] [CrossRef]
- Ye, L.; Su, S.W. Experimental Design and Its Posterior Efficiency for the Calibration of Wearable Sensors. J. Intell. Learn. Syst. Appl. 2015, 7, 11–20. [Google Scholar] [CrossRef]
- Frosio, I.; Pedersini, F.; Alberto Borghese, N. Autocalibration of MEMS accelerometers. IEEE Trans. Instrum. Meas. 2009, 58, 2034–2041. [Google Scholar] [CrossRef]
- Frosio, I.; Pedersini, F.; Borghese, N.A. Auto-calibration of triaxial MEMS accelerometers with automatic sensor model selection. Sens. J. 2012, 12, 2100–2108. [Google Scholar] [CrossRef]
- Xu, J.; Xu, L. Fault Diagnostics. In Integrated System Health Management: Perspectives on Systems Engineering Techniques; Academic Press: Cambridge, MA, USA, 2017; pp. 247–317. [Google Scholar]
- Dong, J.; Verhaegen, M. Identification of fault estimation filter from I/O data for systems with stable inversion. IEEE Trans. Autom. Control 2012, 57, 1347–1361. [Google Scholar] [CrossRef]
- Hou, Z.-S.; Wang, Z. From model-based control to data-driven control: Survey, classification and perspective. J. Inf. Sci. 2013, 235, 3–35. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. A new approach to intelligent fault diagnosis of rotating machinery. Expert Syst. Appl. 2008, 35, 1593–1600. [Google Scholar] [CrossRef]
- Youssef, T.; Chadli, M.; Karimi, H.R.; Wang, R. Actuator and sensor faults estimation based on proportional integral observer for TS fuzzy model. J. Franklin Inst. 2017, 354, 2524–2542. [Google Scholar] [CrossRef]
- Ding, S.X.; Yang, Y.; Zhang, Y.; Li, L. Data-driven realizations of kernel and image representations and their application to fault detection and control system design. Automatica 2014, 50, 2615–2623. [Google Scholar] [CrossRef]
- Chen, J.; Patton, R.J. Robust Model-Based Fault Diagnosis for Dynamic Systems; Springer: New York, NY, USA, 2012; Volume 3. [Google Scholar]
- Ding, S. Model-Based Fault Diagnosis Techniques: Design Schemes, Algorithms, and Tools; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Hinze, W.J.; Von Frese, R.R.; Saad, A.H. Gravity and Magnetic Exploration: Principles, Practices, and Applications; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter |
|---|---|
| Ambient temperature, measured by the thermometer | |
| The nominal temperature, which is typically 25 °C | |
| The scale factor independent of the temperature of the i-th sensor | |
| The scale factor depended on the first-degree temperature of the i-th sensor | |
| The scale factor depended on the second-degree temperature of the i-th sensor | |
| The scale factor depended on the third-degree temperature of the i-th sensor | |
| The bias independent of the temperature of the i-th sensor | |
| The bias dependent on the first-degree temperature of the i-th sensor | |
| The bias dependent on the second-degree temperature of the i-th sensor | |
| The bias dependentt on the third-degree temperature of the i-th sensor | |
| Measured voltage of i-th accelerometer | |
| Acceleration in the direction of the i-th accelerometer | |
| Misalignment Parameter between sensor i and sensor j |
| Test No. | Faulty Acc. | Voltage of Faulty Acc. | MAE Using 4 Acc. | Fault Detection | MAE for 3 Acc. 1, 2, 3 | MAE for 3 Acc. 1, 2, 4 | MAE for 3 Acc. 1, 3, 4 | MAE for 3 Acc. 2, 3, 4 | Isolated Acc. |
|---|---|---|---|---|---|---|---|---|---|
| 1 | - | - | 0.000212 | No | 0.000705 | 0.000763 | 0.000512 | 0.000758 | - |
| 2 | 1 | 0 | 0.1454 | Yes | 0.2063 | 0.1456 | 0.1312 | 0.000758 | 1 |
| 3 | 1 | −3 | 0.2073 | Yes | 0.2830 | 1.0463 | 0.9643 | 0.000758 | 1 |
| 4 | 1 | +3 | 0.1462 | Yes | 0.3541 | 0.2404 | 0.2503 | 0.000758 | 1 |
| 5 | 1 | Rand | 0.1225 | Yes | 0.2080 | 0.2837 | 0.2285 | 0.000758 | 1 |
| 6 | 2 | 0 | 0.1369 | Yes | 0.2131 | 0.1537 | 0.000512 | 0.1417 | 2 |
| 7 | 2 | −3 | 0.2042 | Yes | 0.2703 | 1.0223 | 0.000512 | 0.9959 | 2 |
| 8 | 2 | +3 | 0.1522 | Yes | 0.3517 | 0.2534 | 0.000512 | 0.2743 | 2 |
| 9 | 2 | Rand | 0.1282 | Yes | 0.2645 | 0.2073 | 0.000512 | 0.1918 | 2 |
| 10 | 3 | 0 | 0.1523 | Yes | 0.1721 | 0.000763 | 0.1469 | 0.1471 | 3 |
| 11 | 3 | −3 | 0.1950 | Yes | 0.8378 | 0.000763 | 0.9747 | 1.0218 | 3 |
| 12 | 3 | +3 | 0.1472 | Yes | 0.4670 | 0.000763 | 0.2477 | 0.2560 | 3 |
| 13 | 3 | Rand | 0.1264 | Yes | 0.2343 | 0.000763 | 0.1927 | 0.2304 | 3 |
| 14 | 4 | 0 | 0.3107 | Yes | 0.000705 | 0.3669 | 0.3390 | 0.3323 | 4 |
| 15 | 4 | −3 | 0.1736 | Yes | 0.000705 | 0.8509 | 0.9739 | 0.8332 | 4 |
| 16 | 4 | +3 | 0.1850 | Yes | 0.000705 | 0.2332 | 0.2636 | 0.2347 | 4 |
| 17 | 4 | Rand | 0.1979 | Yes | 0.000705 | 0.2722 | 0.4745 | 0.4751 | 4 |
| 18 | 1 and 2 | Rand | 0.2310 | Yes | 0.3291 | 0.7170 | 0.3398 | 0.2550 | - |
| 19 | 1 and 3 | Rand | 0.2381 | Yes | 0.3591 | 0.2520 | 0.5747 | 0.3349 | - |
| 20 | 1 and 4 | Rand | 0.2296 | Yes | 0.2496 | 0.4378 | 0.4715 | 0.3351 | - |
| 21 | 2 and 3 | Rand | 0.2148 | Yes | 0.3052 | 0.4401 | 0.2454 | 0.3970 | - |
| 22 | 2 and 4 | Rand | 0.2268 | Yes | 0.2169 | 0.5142 | 0.4373 | 0.3788 | - |
| 23 | 3 and 4 | Rand | 0.2457 | Yes | 0.3235 | 0.4539 | 0.2616 | 0.2775 | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seyed Moosavi, S.M.; Moaveni, B.; Moshiri, B.; Arvan, M.R. Auto-Calibration and Fault Detection and Isolation of Skewed Redundant Accelerometers in Measurement While Drilling Systems. Sensors 2018, 18, 702. https://doi.org/10.3390/s18030702
Seyed Moosavi SM, Moaveni B, Moshiri B, Arvan MR. Auto-Calibration and Fault Detection and Isolation of Skewed Redundant Accelerometers in Measurement While Drilling Systems. Sensors. 2018; 18(3):702. https://doi.org/10.3390/s18030702
Chicago/Turabian StyleSeyed Moosavi, Seyed Mohsen, Bijan Moaveni, Behzad Moshiri, and Mohammad Reza Arvan. 2018. "Auto-Calibration and Fault Detection and Isolation of Skewed Redundant Accelerometers in Measurement While Drilling Systems" Sensors 18, no. 3: 702. https://doi.org/10.3390/s18030702
APA StyleSeyed Moosavi, S. M., Moaveni, B., Moshiri, B., & Arvan, M. R. (2018). Auto-Calibration and Fault Detection and Isolation of Skewed Redundant Accelerometers in Measurement While Drilling Systems. Sensors, 18(3), 702. https://doi.org/10.3390/s18030702