Estimating and Comparing Dam Deformation Using Classical and GNSS Techniques

 ,
,  ,
,  and
and
Abstract
:1. Introduction
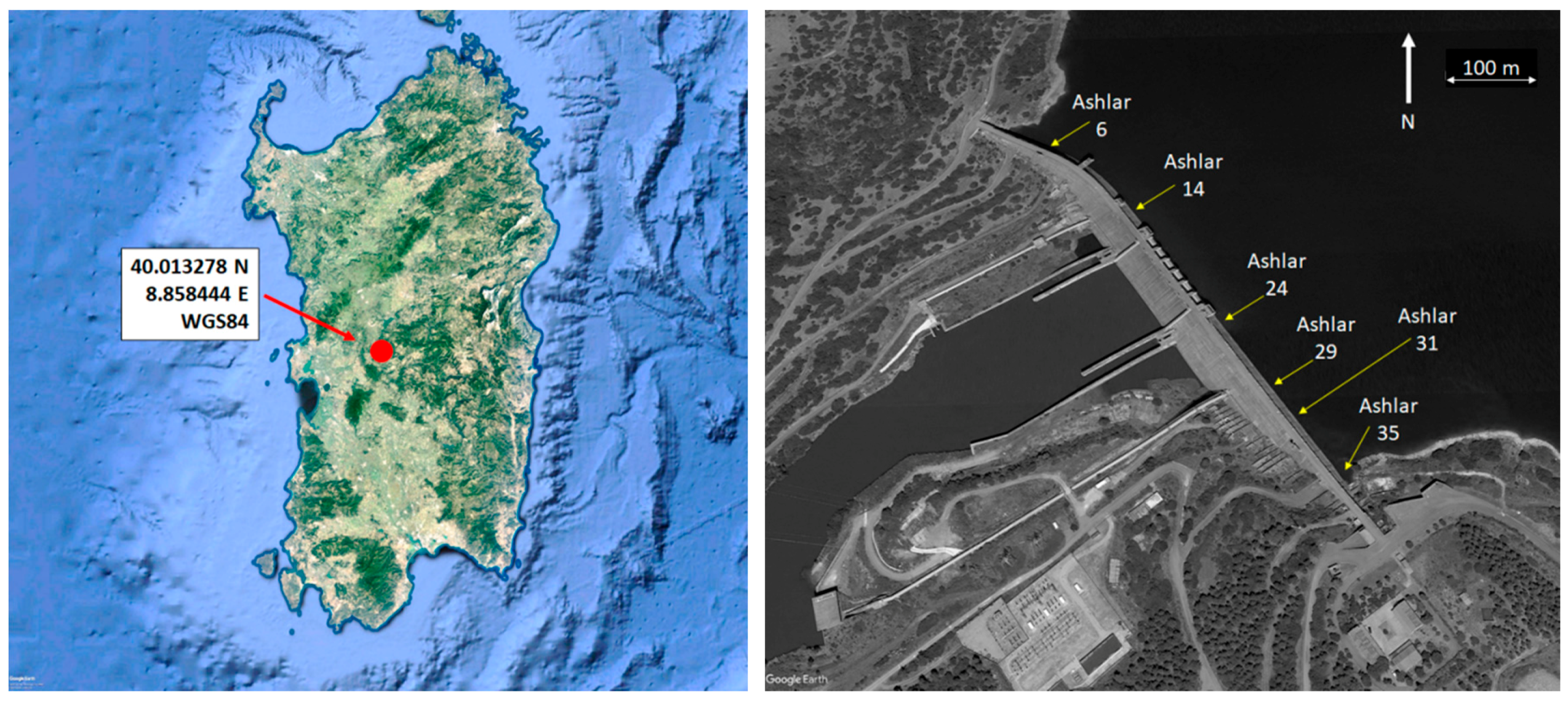
2. Cantoniera Dam Monitoring System
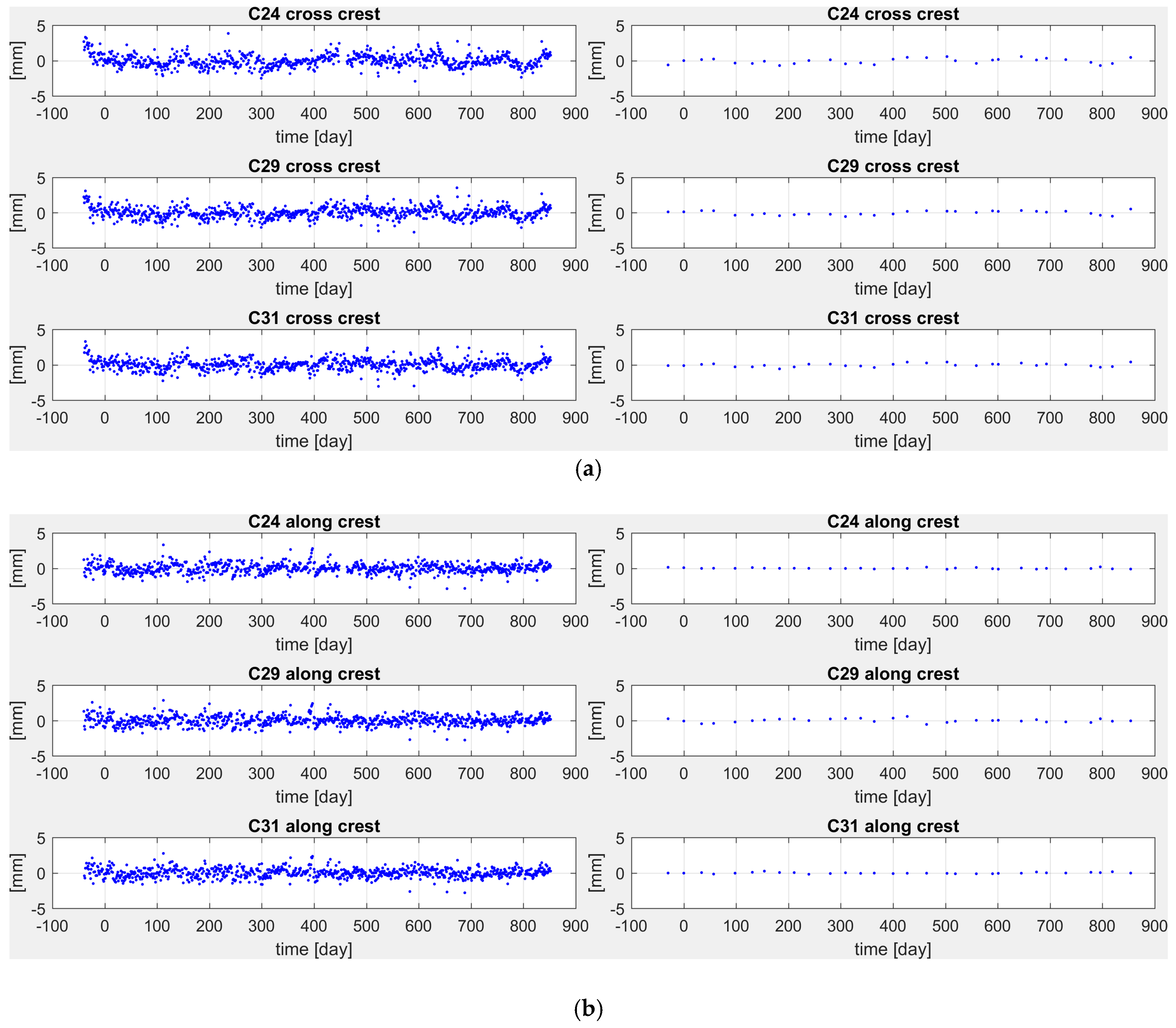
3. Time Series Comparison and Modeling
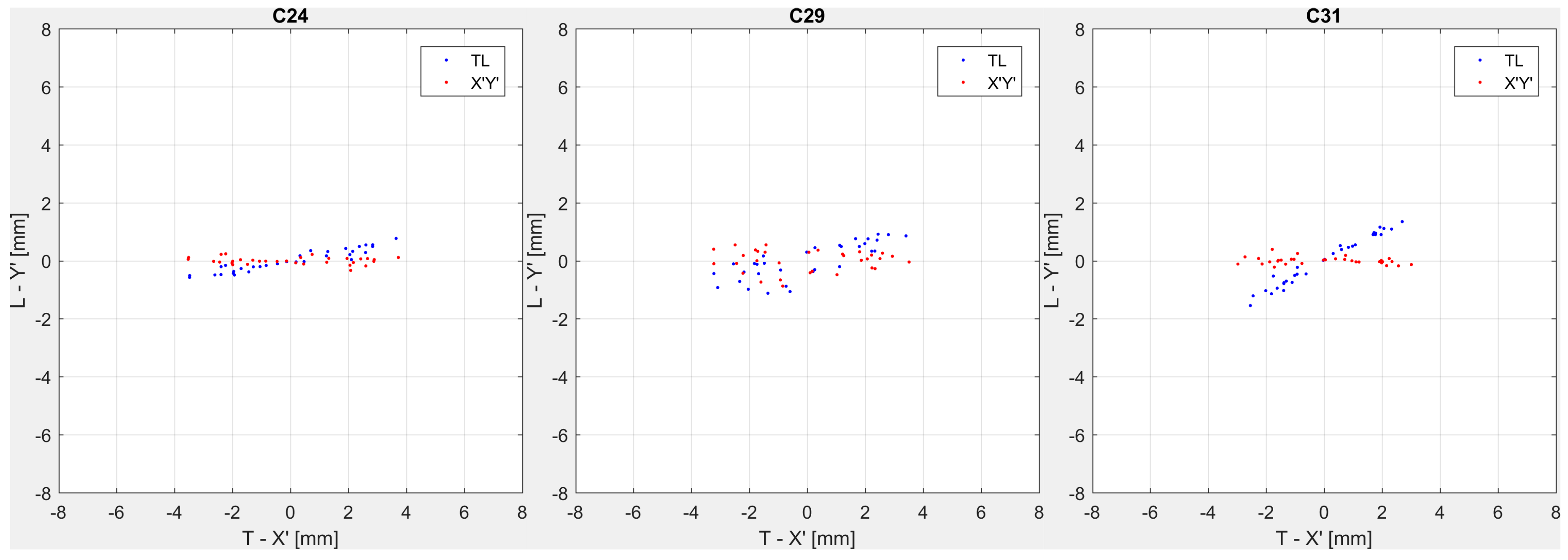
3.1. Defining the Reference Frames for Comparing the GNSS and the Pendulum Horizontal Displacements
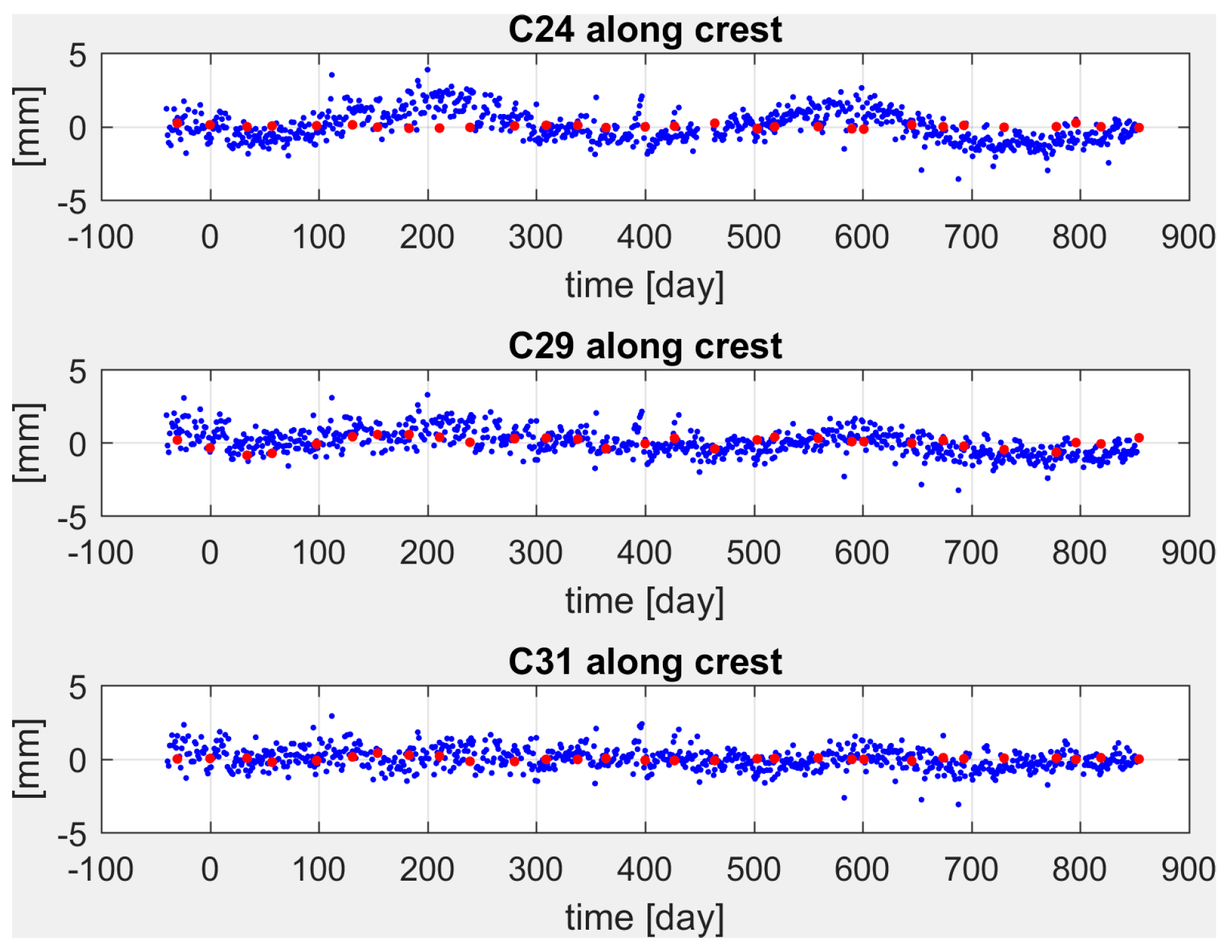
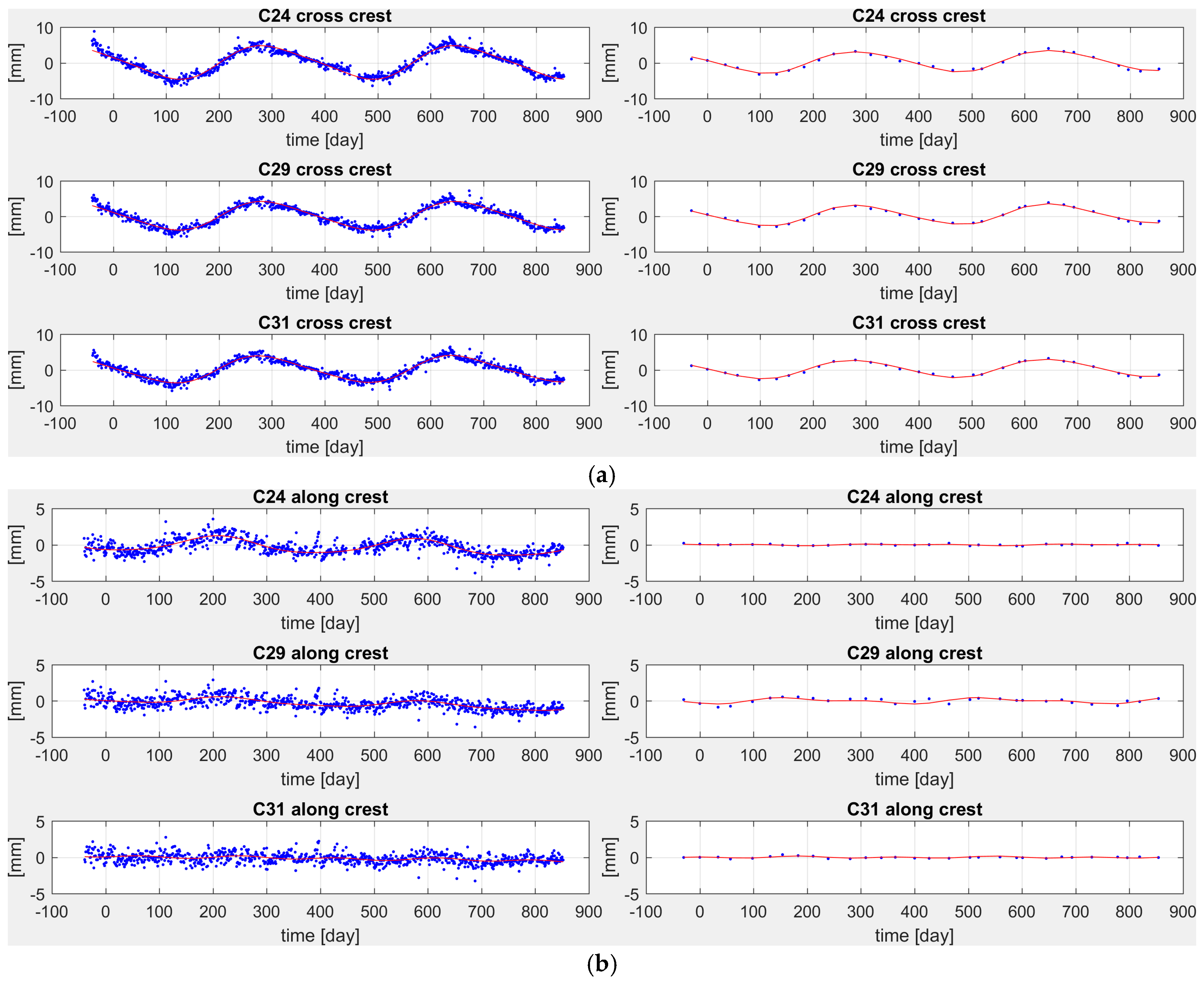
3.2. Analytical Modeling of Observed Dam Displacements
4. Comments and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Scaioni, M.; Marsella, M.; Crosetto, M.; Tornatore, V.; Wang, J. Sensors for Dam Deformation Monitoring. 2018; in preparation. [Google Scholar]
- Antova, G. 3D Laser Scanning for Dam Deformation Monitoring. In Proceedings of the 7th International Scientific Conference-SGEM, Varna, Bulgaria, 11–15 June 2007. [Google Scholar]
- Alba, M.; Fregonese, L.; Prandi, F.; Scaioni, M.; Valgoi, P. Structural monitoring of a large dam by terrestrial laser scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 6. [Google Scholar]
- Di Martire, D.; Iglesias, R.; Monells, D.; Centolanza, G.; Sica, S.; Ramondini, M.; Pagano, L.; Mallorquí, J.J.; Calcaterra, D. Comparison between differential SAR interferometry and ground measurements data in the displacement monitoring of the earth-dam of Conza della Campania (Italy). Remote Sens. Environ. 2014, 148, 58–69. [Google Scholar] [CrossRef]
- Honda, K.; Nakanishi, T.; Haraguchi, M.; Mushiake, N.; Iwasaki, T.; Satoh, H.; Kobori, T.; Yamaguchi, Y. Application of exterior deformation monitoring of dams by DInSAR analysis using ALOS PALSAR. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012. [Google Scholar]
- Anghel, A.; Vasile, G.; Boudon, R.; d’Urso, G.; Girard, A.; Boldo, D.; Bost, V. Combining spaceborne SAR images with 3D point clouds for infrastructure monitoring applications. ISPRS J. Photogramm. Remote Sens. 2016, 111, 45–61. [Google Scholar] [CrossRef]
- Milillo, P.; Perissin, D.; Salzer, J.T.; Lundgren, P.; Lacava, G.; Milillo, G.; Serio, C. Monitoring dam structural health from space: Insights from novel InSAR techniques and multi-parametric modeling applied to the Pertusillo dam Basilicata, Italy. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 221–229. [Google Scholar] [CrossRef]
- Mascolo, L.; Nico, G.; Di Pasquale, A.; Pitullo, A. Use of advanced SAR monitoring techniques for the assessment of the behaviour of old embankment dams. Int. Soc. Opt. Photonics 2014. [Google Scholar] [CrossRef]
- De Loach, S.R. Continuous deformation monitoring with GPS. J. Surv. Eng. 1989, 115, 93–110. [Google Scholar] [CrossRef]
- Behr, J.; Hudnut, K.; King, N. Monitoring structural deformation at Pacoima dam, California using continuous GPS. In Proceedings of the 11th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 15–18 September 1998. [Google Scholar]
- Rutledge, D.R.; Meyerholtz, S.Z.; Brown, N.; Baldwin, C. Dam stability: Assessing the performance of a GPS monitoring system. GPS World 2006, 17, 26–33. [Google Scholar]
- Chrzanowski, A.; Szostak-Chrzanowski, A. Deformation monitoring surveys-old problems and new solutions. Rep. Geodesy 2009, 87, 85–103. [Google Scholar]
- Drummond, P. Combining CORS Networks, Automated Observations and Processing, for Network Rtk Integrity Analysis and Deformation Monitoring. In Proceedings of the 15th FIG Congress Facing the Challenges, Sydney, Australia, 11–16 April 2010. [Google Scholar]
- Van Cranenbroeck, J. State of the Art in Structural Geodetic Monitoring Solutions for Hydro Power Dams. In Proceedings of the FIG Working Week, Marrakech, Morocco, 18–22 May 2011. [Google Scholar]
- Kaftan, V.I.; Ustinov, A.V. Use of global navigation satellite systems for monitoring deformations of water-development works. Power Technol. Eng. 2013, 47, 30–37. [Google Scholar] [CrossRef]
- Dardanelli, G.; La Loggia, G.; Perfetti, N.; Capodici, F.; Puccio, L.; Maltese, A. Monitoring displacements of an earthen dam using GNSS and remote sensing. SPIE Remote Sens. 2014, 923928. [Google Scholar] [CrossRef]
- Yavaşoğlu, H.H.; Kalkan, Y.; Tiryakioğlu, İ.; Yigit, C.O.; Özbey, V.; Alkan, M.N.; Bilgi, S.; Alkan, R.M. Monitoring the deformation and strain analysis on the Ataturk Dam, Turkey. Geomat. Nat. Hazards Risk 2018, 9, 94–107. [Google Scholar] [CrossRef]
- Pipitone, C.; Maltese, A.; Dardanelli, G.; Lo Brutto, M.; Loggia, G.L. Monitoring water surface and level of a reservoir using different remote sensing approaches and comparison with dam displacements evaluated via GNSS. Remote Sens. 2018, 10, 71. [Google Scholar] [CrossRef]
- Radhakrishnan, N. Application of GPS in structural deformation monitoring: A case study on Koyna dam. J. Geomat. 2014, 8, 1. [Google Scholar]
- Barzaghi, R.; Pinto, L.; Monaci, R. The monitoring of gravity dams: Two tests in Sardinia, Italy. In Proceedings of the FIG Working Week 2012, Rome, Italy, 6–10 May 2012. [Google Scholar]
- Galán-Martín, D.; Marchamalo-Sacristán, M.; Martinez-Marín, R.; Sánchez-Sobrino, J.A. Geomatics applied to dam safety DGPS real time monitoring. Int. J. Civil Eng. 2010, 11, 134–141. [Google Scholar]
- Dai, W.; Huang, D.; Liu, B. A phase space reconstruction based single channel ICA algorithm and its application in dam deformation analysis. Surv. Rev. 2015, 47, 387–396. [Google Scholar] [CrossRef]
- Montillet, J.P.; Szeliga, W.M.; Melbourne, T.I.; Flake, R.M.; Schrock, G. Critical Infrastructure Monitoring with Global Navigation Satellite Systems. J. Surv. Eng. 2016, 142, 04016014. [Google Scholar] [CrossRef]
- Alevizakou, E.G.; Pantazis, G. A comparative evaluation of various models for prediction of displacements. Appl. Geomat. 2017, 9, 93–103. [Google Scholar] [CrossRef]
- De Sortis, A.; Paoliani, P. Statistical analysis and structural identification in concrete dam monitoring. Eng. Struct. 2007, 29, 110–120. [Google Scholar] [CrossRef]
- Caldera, S.; Realini, E.; Barzaghi, R.; Reguzzoni, M.; Sansò, F. Experimental study on low-cost satellite-based geodetic monitoring over short baselines. J. Surv. Eng. 2016, 142, 04015016. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ashlar | Sensor | Along-Crest Stand. Dev. (mm) | Cross-Crest Stand. Dev. (mm) |
|---|---|---|---|
| no. 24 | pendulum | 0.08 | 0.37 |
| GNSS | 0.69 | 0.88 | |
| collimator | -- | 0.84 | |
| no. 29 | pendulum | 0.26 | 0.28 |
| GNSS | 0.68 | 0.82 | |
| collimator | -- | 0.83 | |
| no. 31 | pendulum | 0.10 | 0.23 |
| GNSS | 0.67 | 0.77 | |
| collimator | -- | 0.78 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barzaghi, R.; Cazzaniga, N.E.; De Gaetani, C.I.; Pinto, L.; Tornatore, V. Estimating and Comparing Dam Deformation Using Classical and GNSS Techniques. Sensors 2018, 18, 756. https://doi.org/10.3390/s18030756
Barzaghi R, Cazzaniga NE, De Gaetani CI, Pinto L, Tornatore V. Estimating and Comparing Dam Deformation Using Classical and GNSS Techniques. Sensors. 2018; 18(3):756. https://doi.org/10.3390/s18030756
Chicago/Turabian StyleBarzaghi, Riccardo, Noemi Emanuela Cazzaniga, Carlo Iapige De Gaetani, Livio Pinto, and Vincenza Tornatore. 2018. "Estimating and Comparing Dam Deformation Using Classical and GNSS Techniques" Sensors 18, no. 3: 756. https://doi.org/10.3390/s18030756
APA StyleBarzaghi, R., Cazzaniga, N. E., De Gaetani, C. I., Pinto, L., & Tornatore, V. (2018). Estimating and Comparing Dam Deformation Using Classical and GNSS Techniques. Sensors, 18(3), 756. https://doi.org/10.3390/s18030756