Design and Implementation of a New System for Large Bridge Monitoring—GeoSHM

 , ,
, ,  , , ,
, , ,
Abstract
:1. Introduction
2. Motivation of Structural Health Monitoring of Long-span Bridges (GeoSHM) R&D
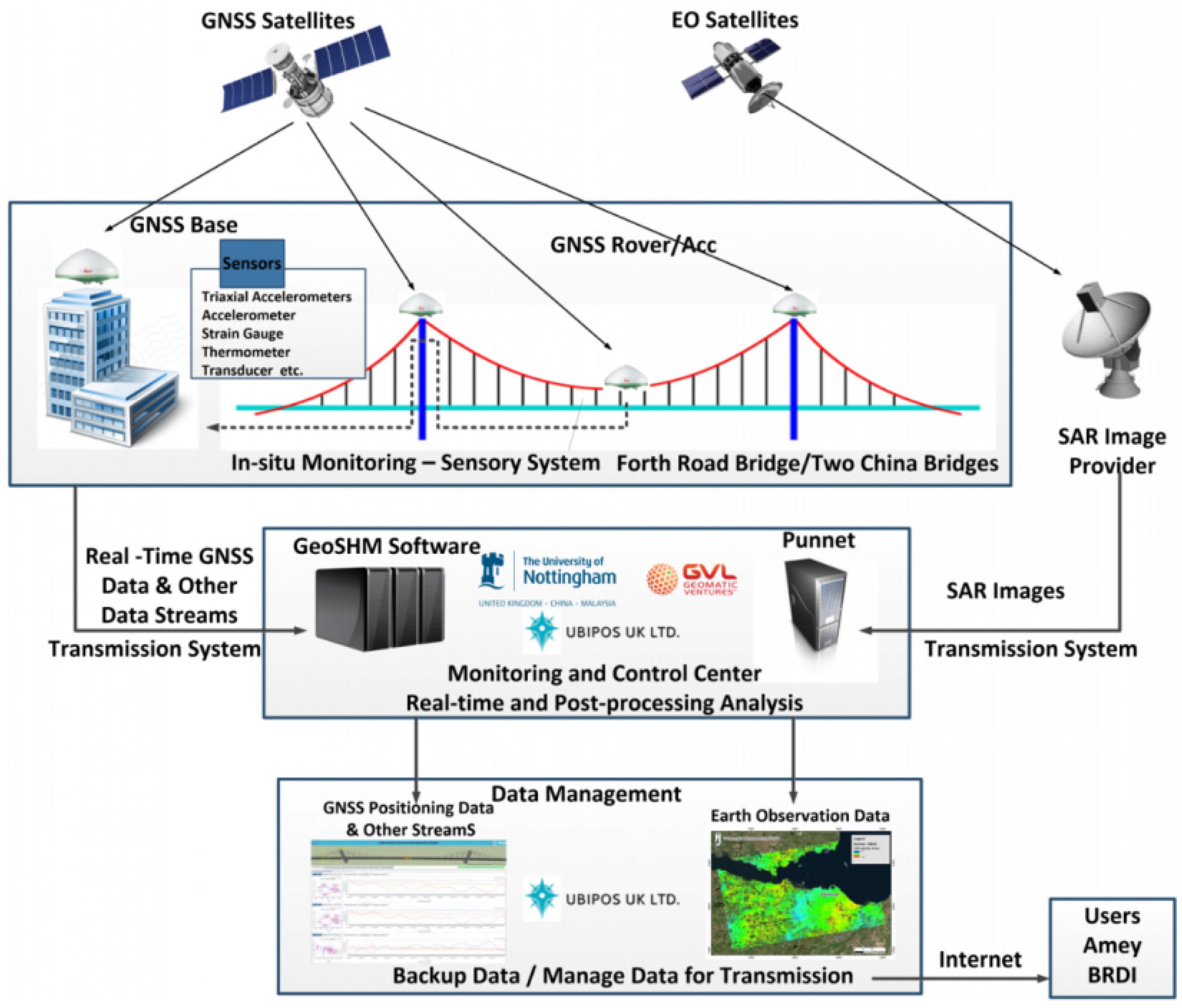
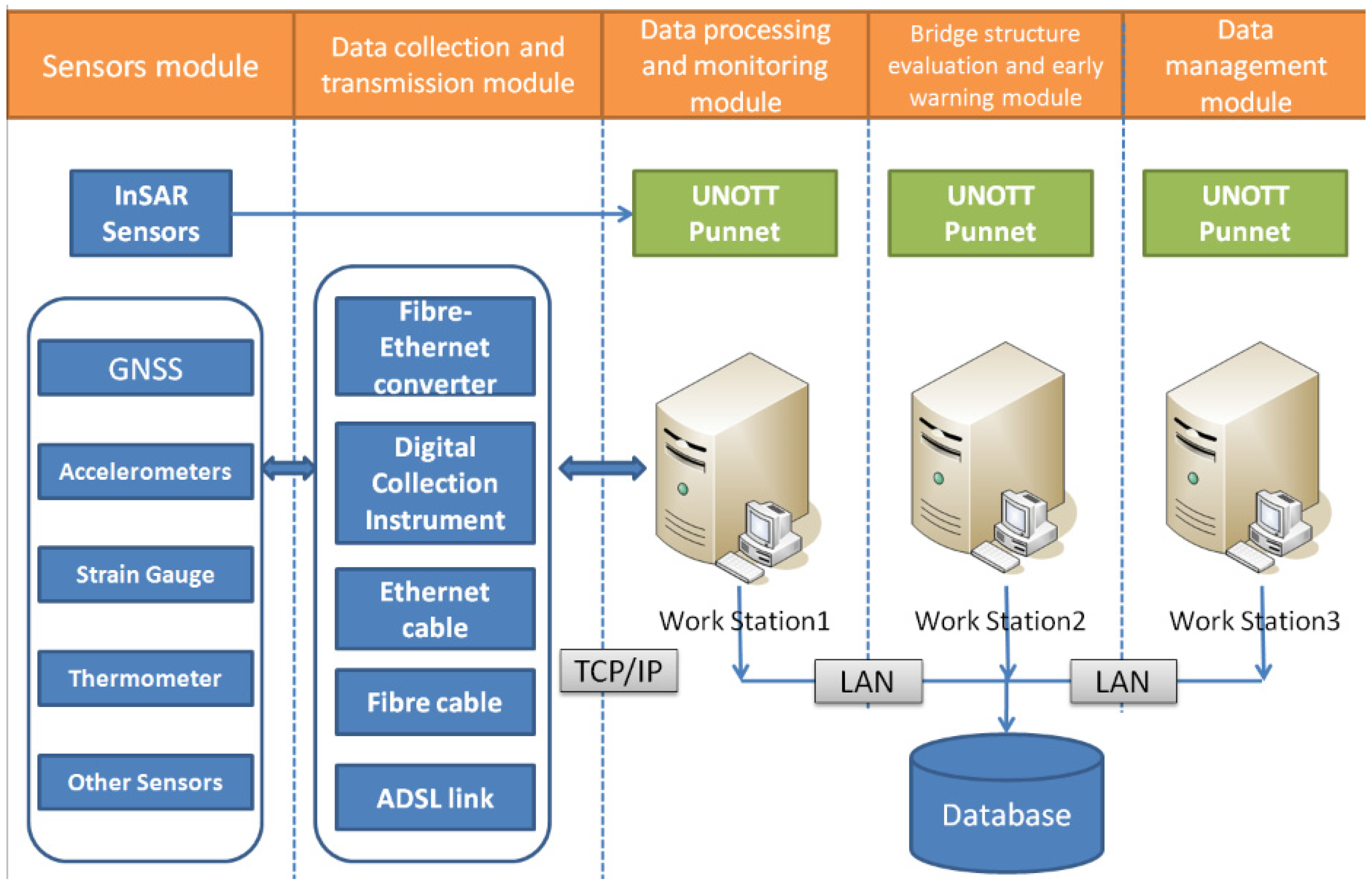
3. GeoSHM System Architecture
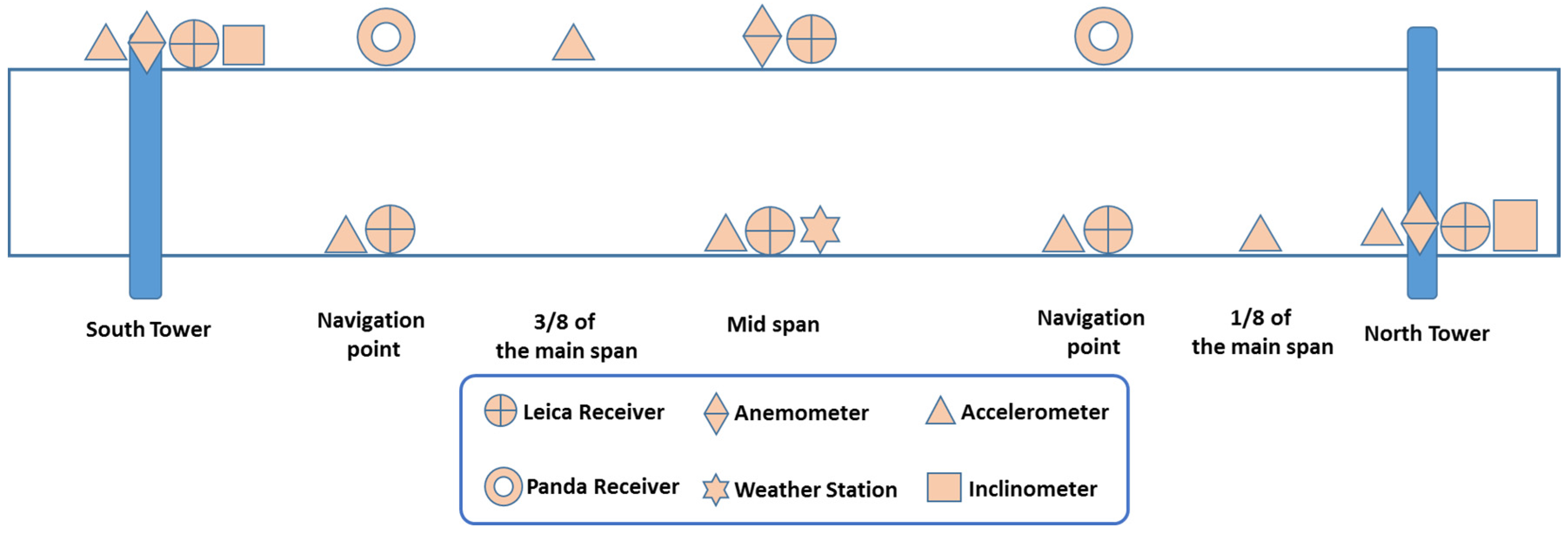
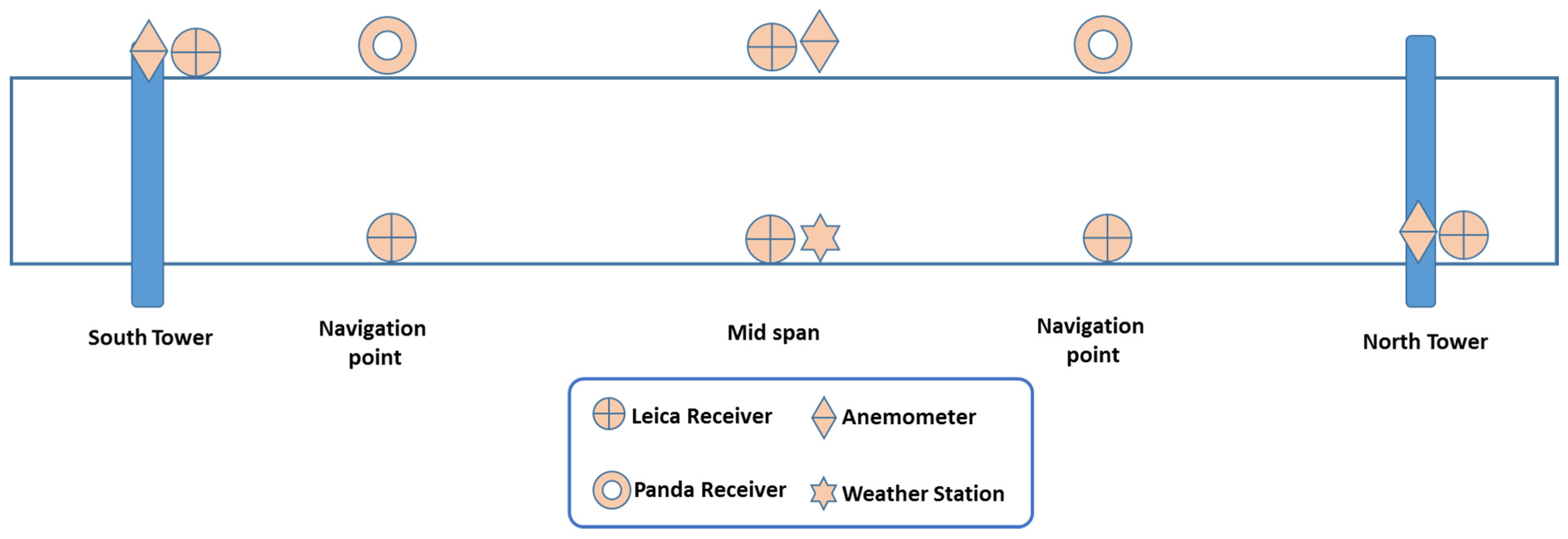
3.1. Sensor Module
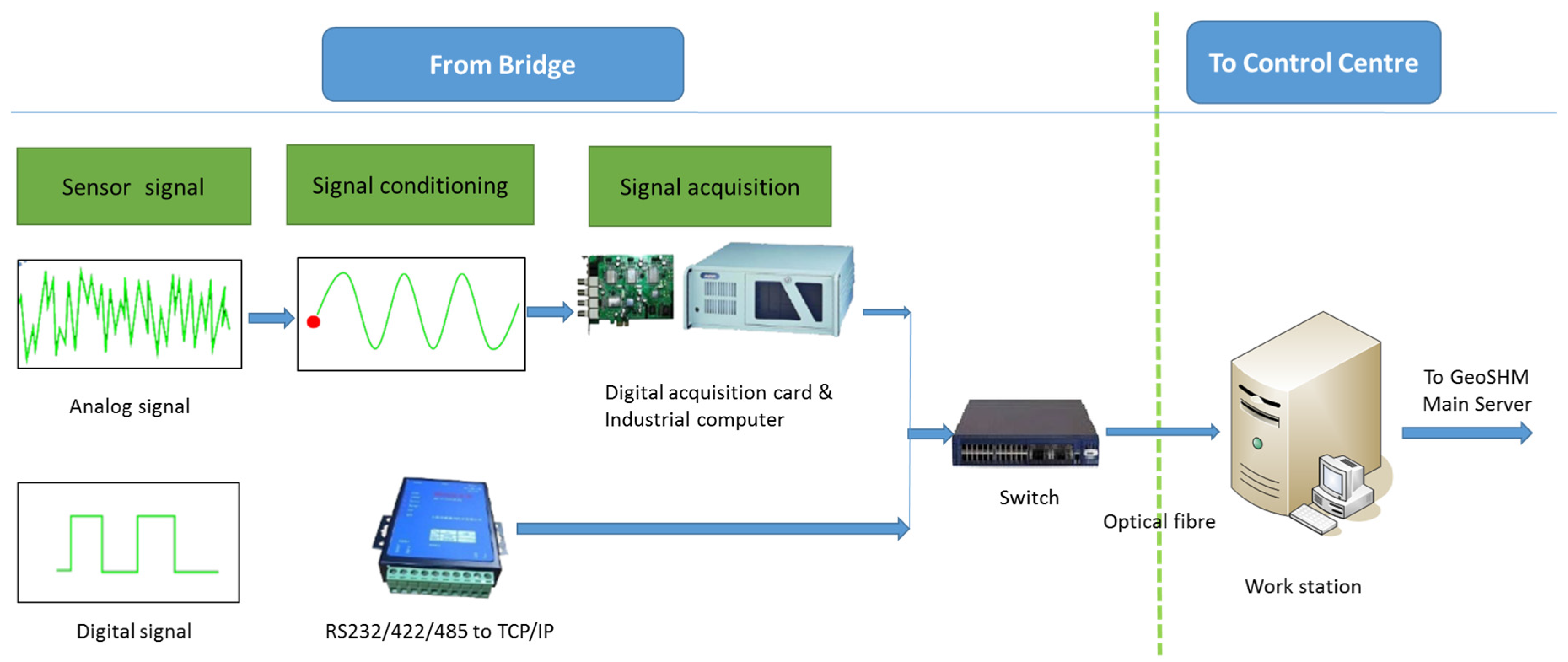
3.2. Data Collection and Transmisstion Module
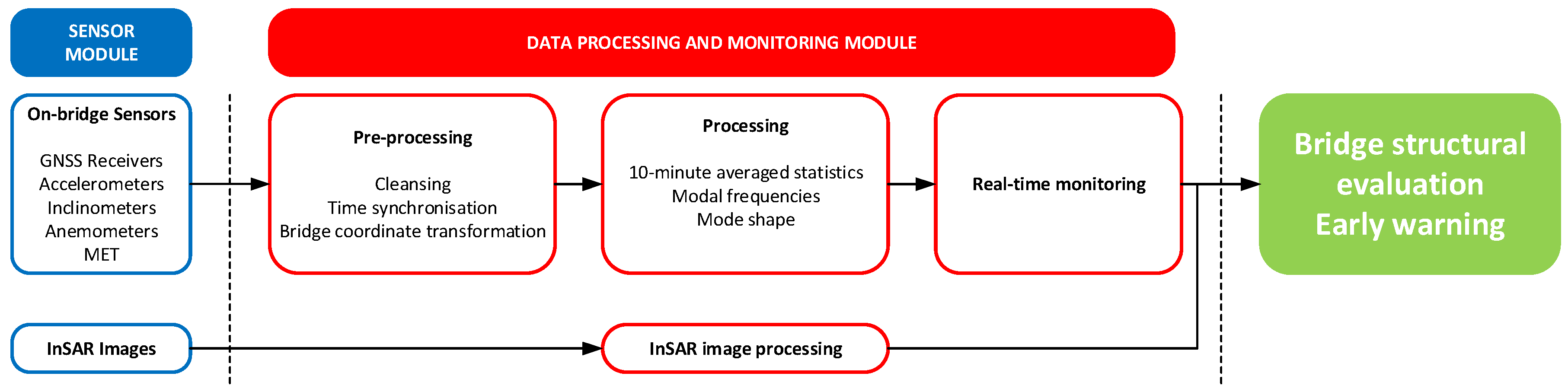
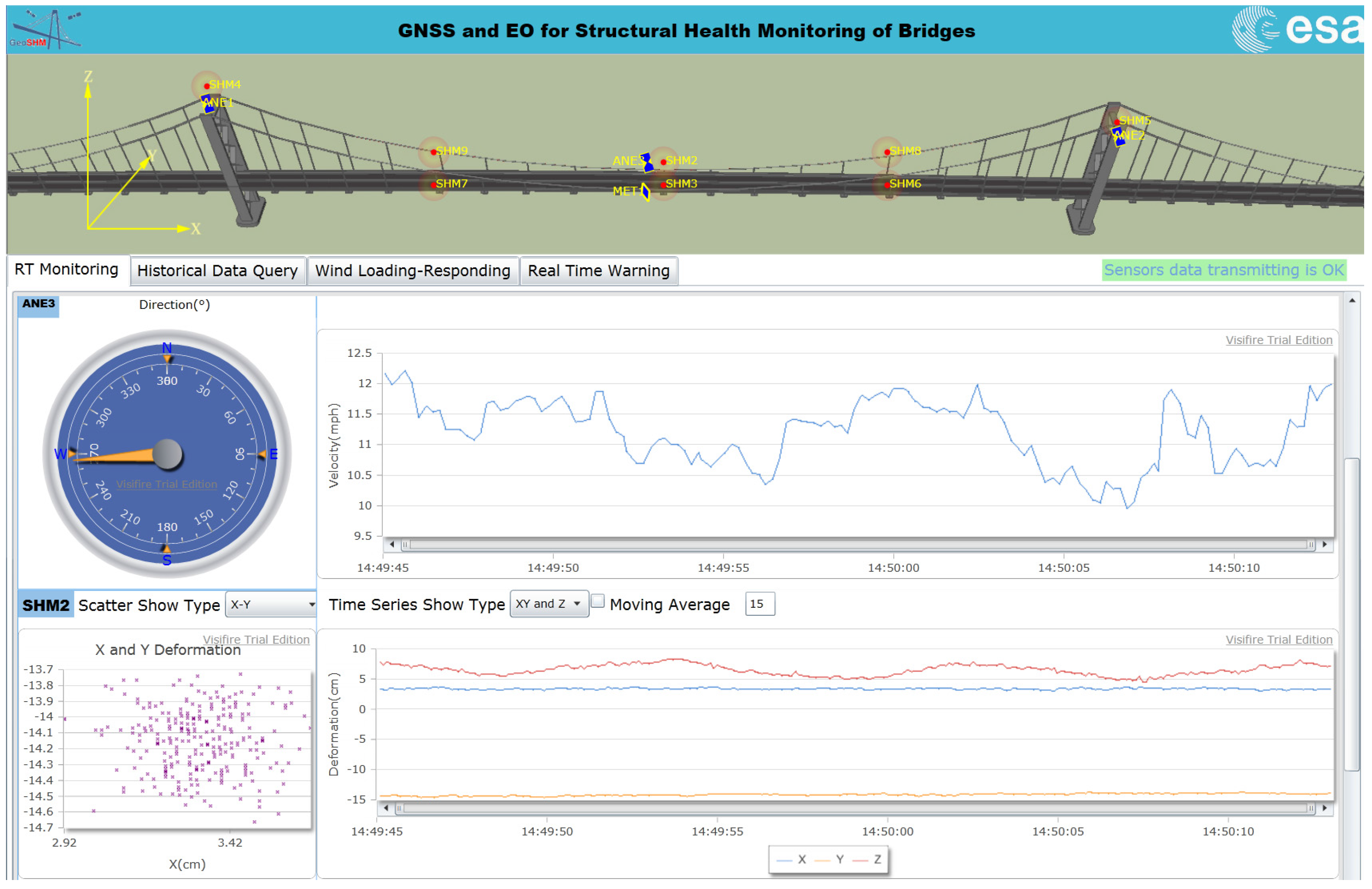
3.3. Data Processing and Monitoring Module
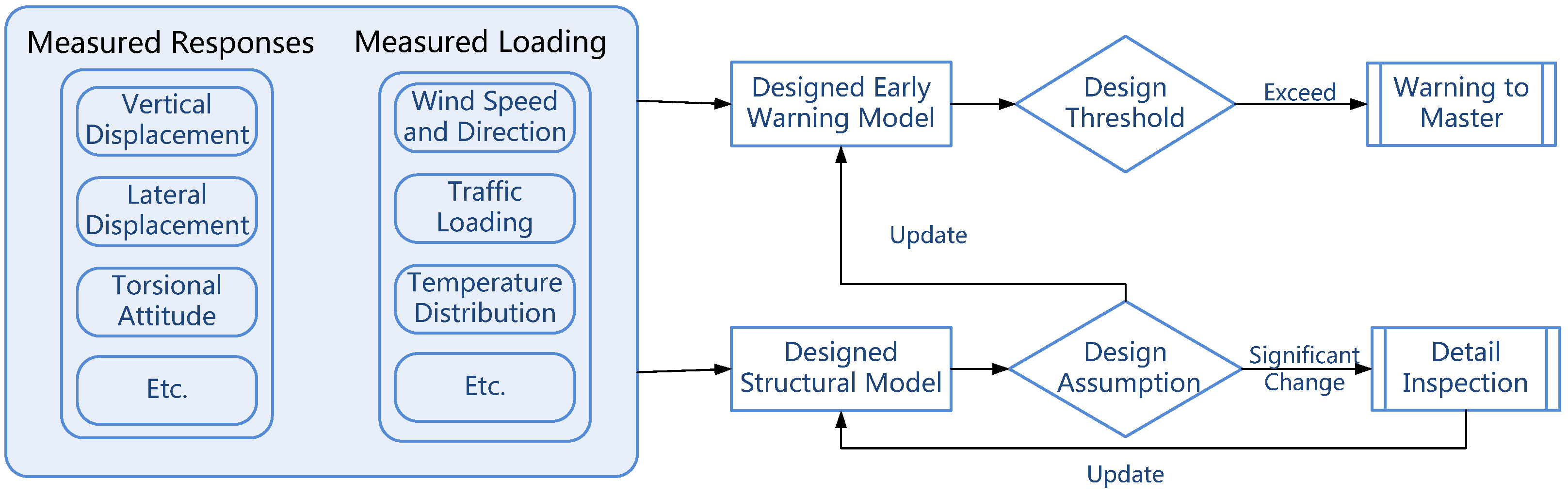
3.4. Bridge Structure Evaluation and Early Warning Module
3.5. Data Management Module
4. Results and Discussion
4.1. Status of Sensor System and Software Development
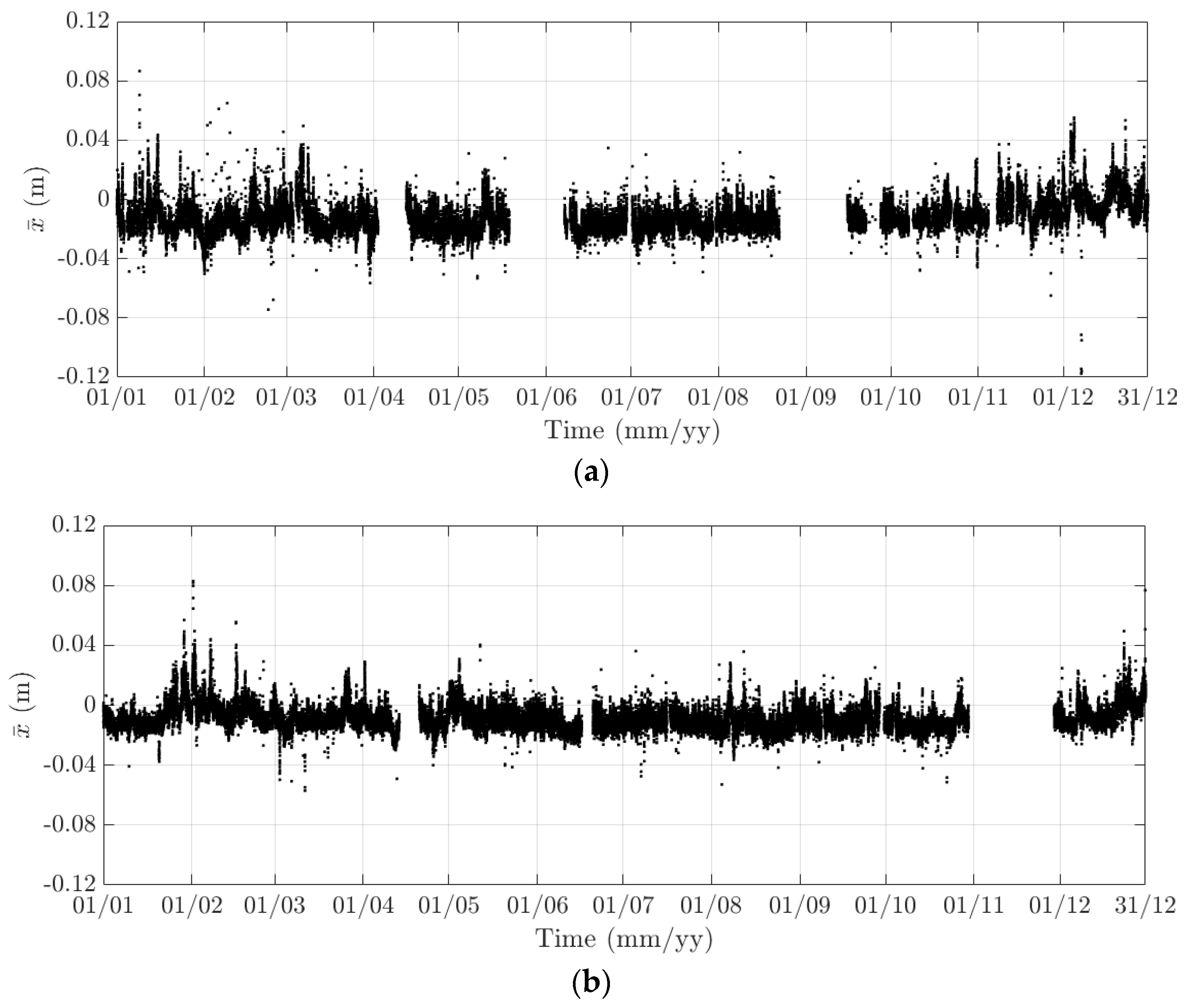
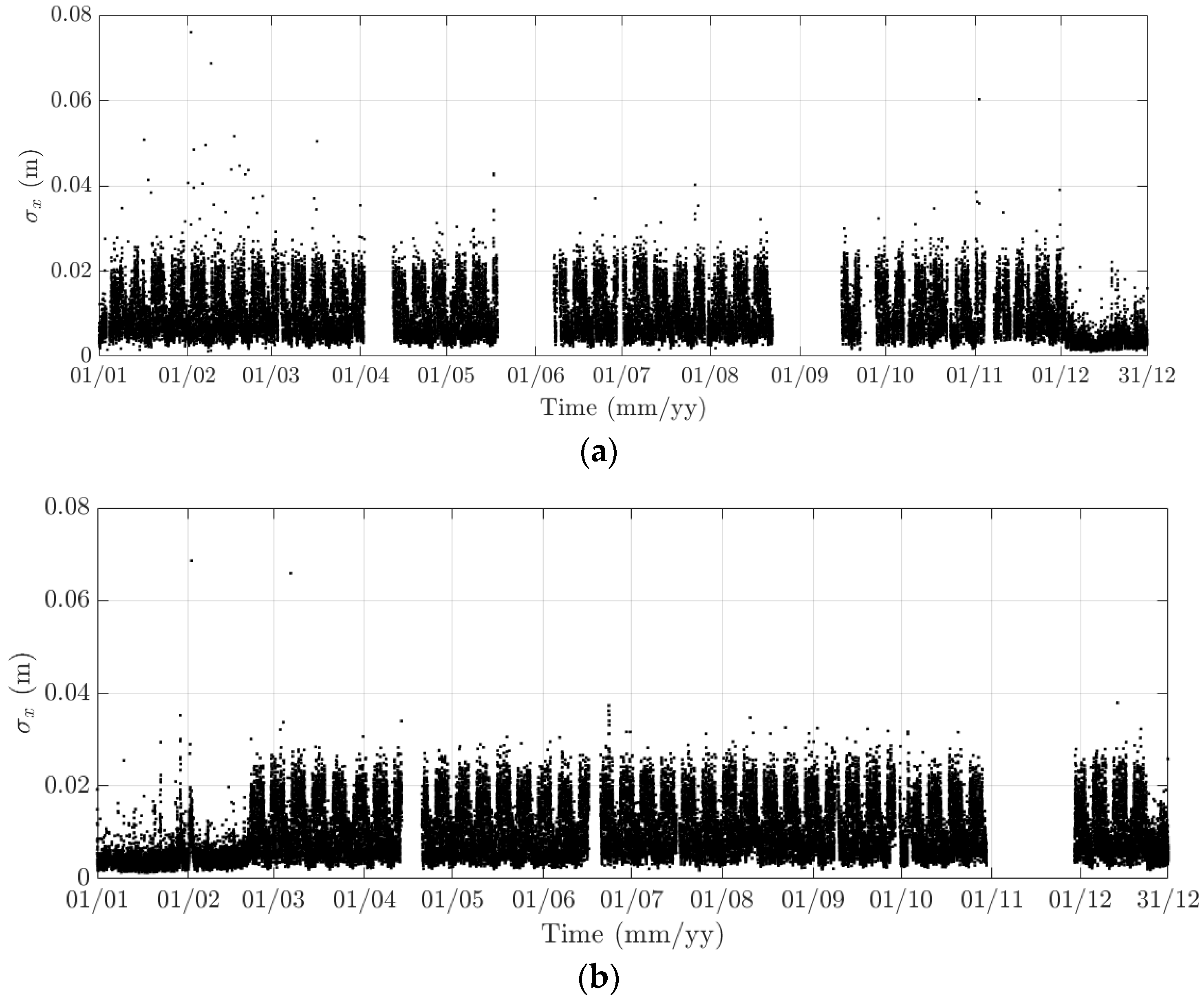
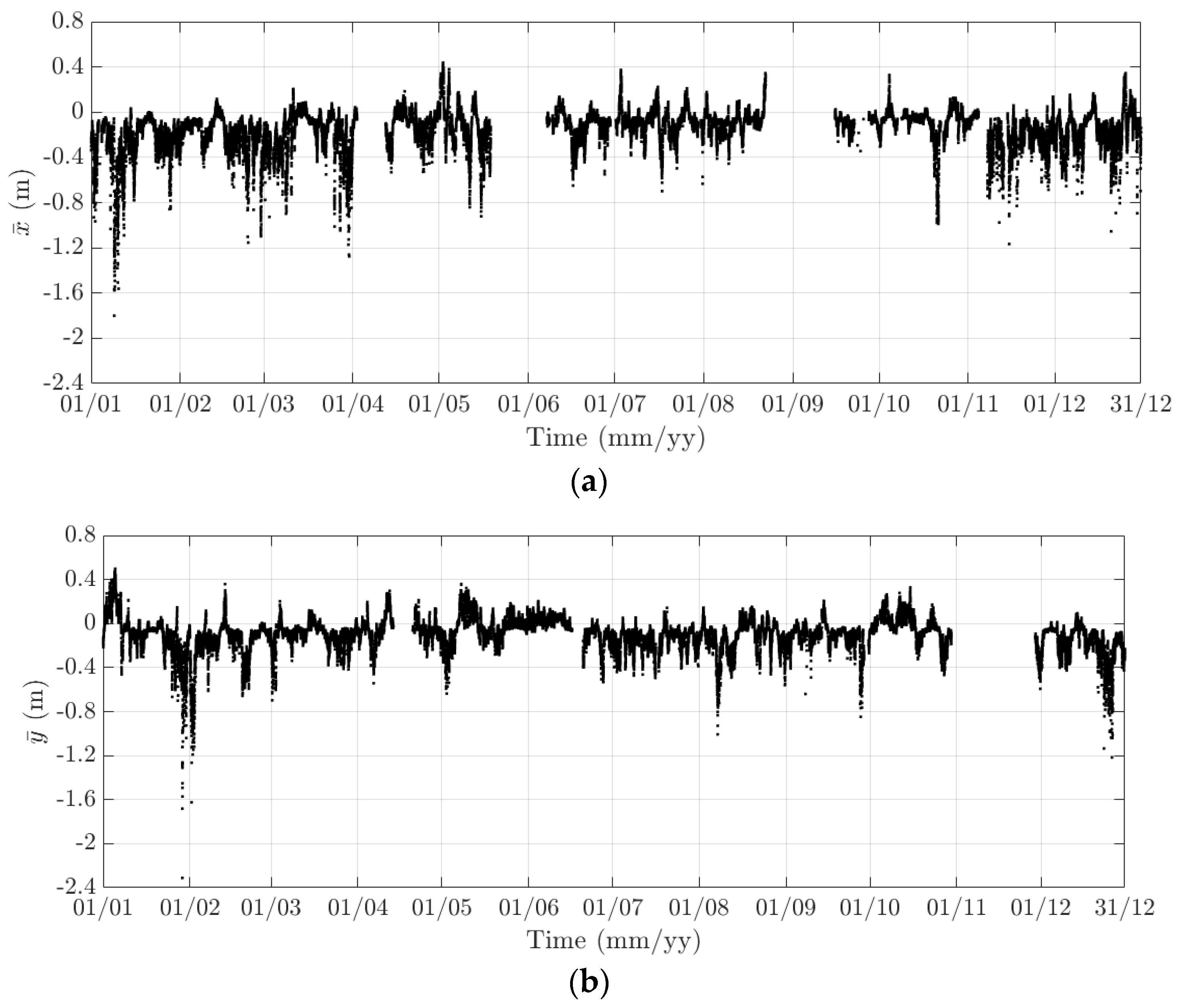
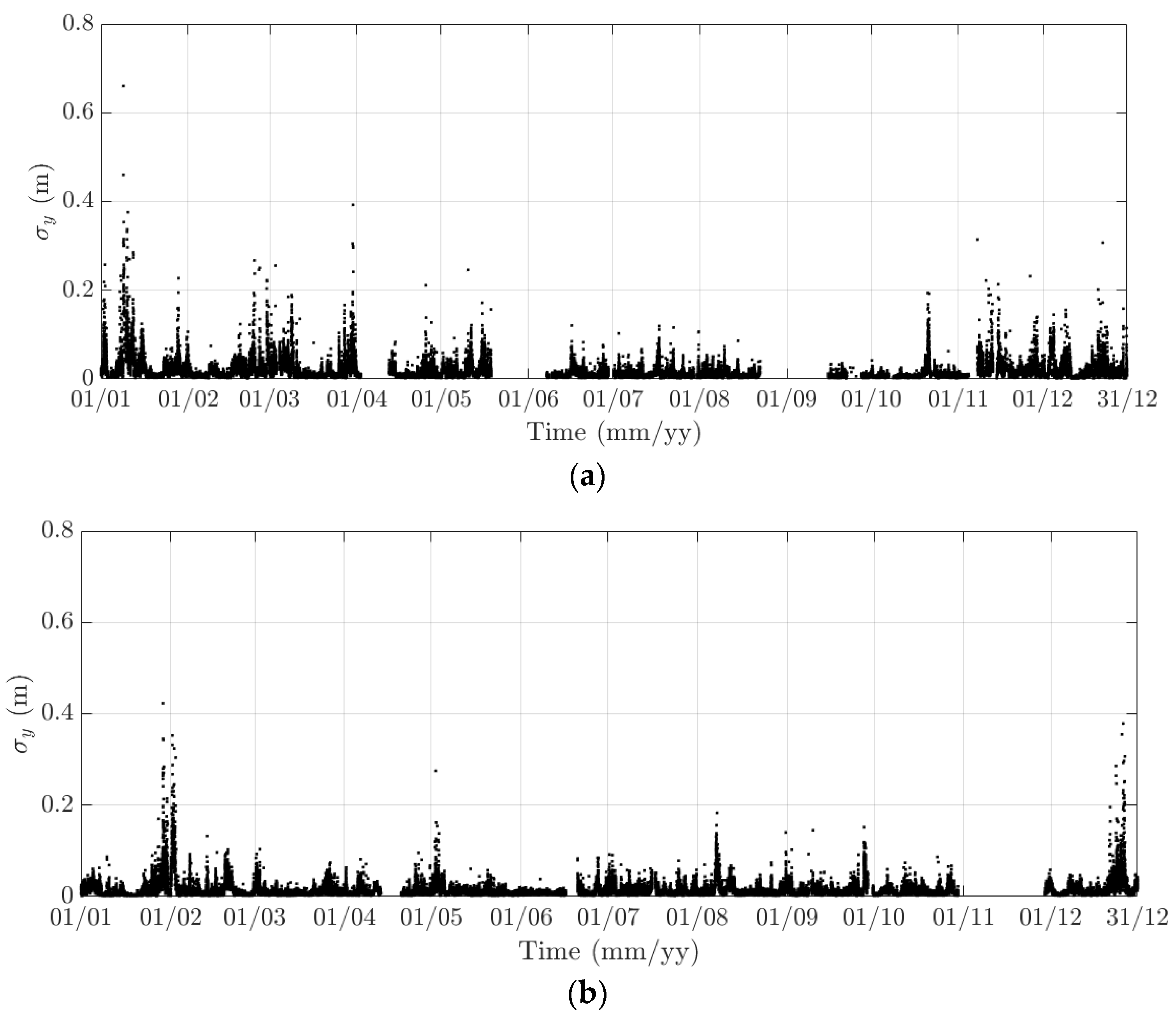
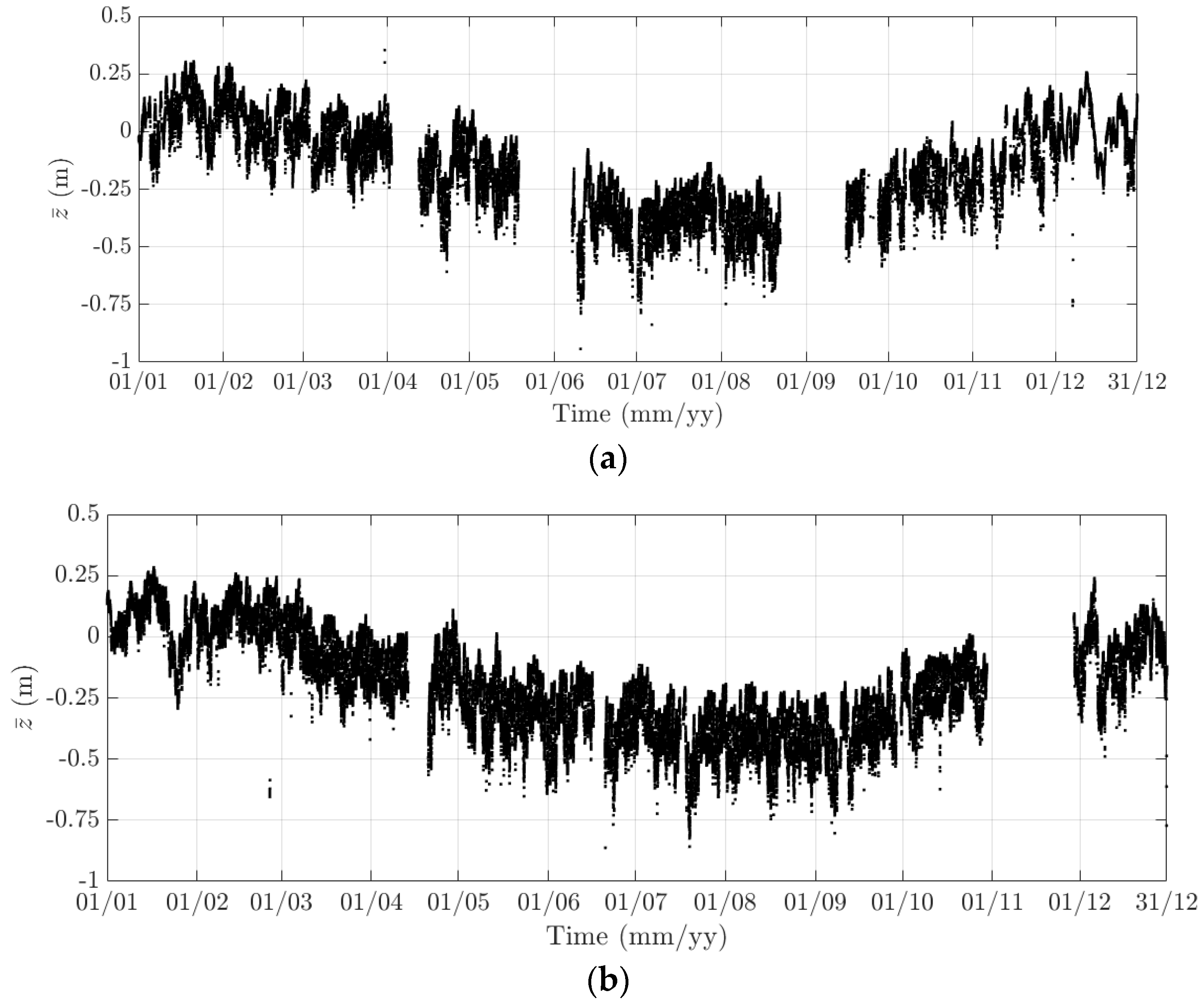
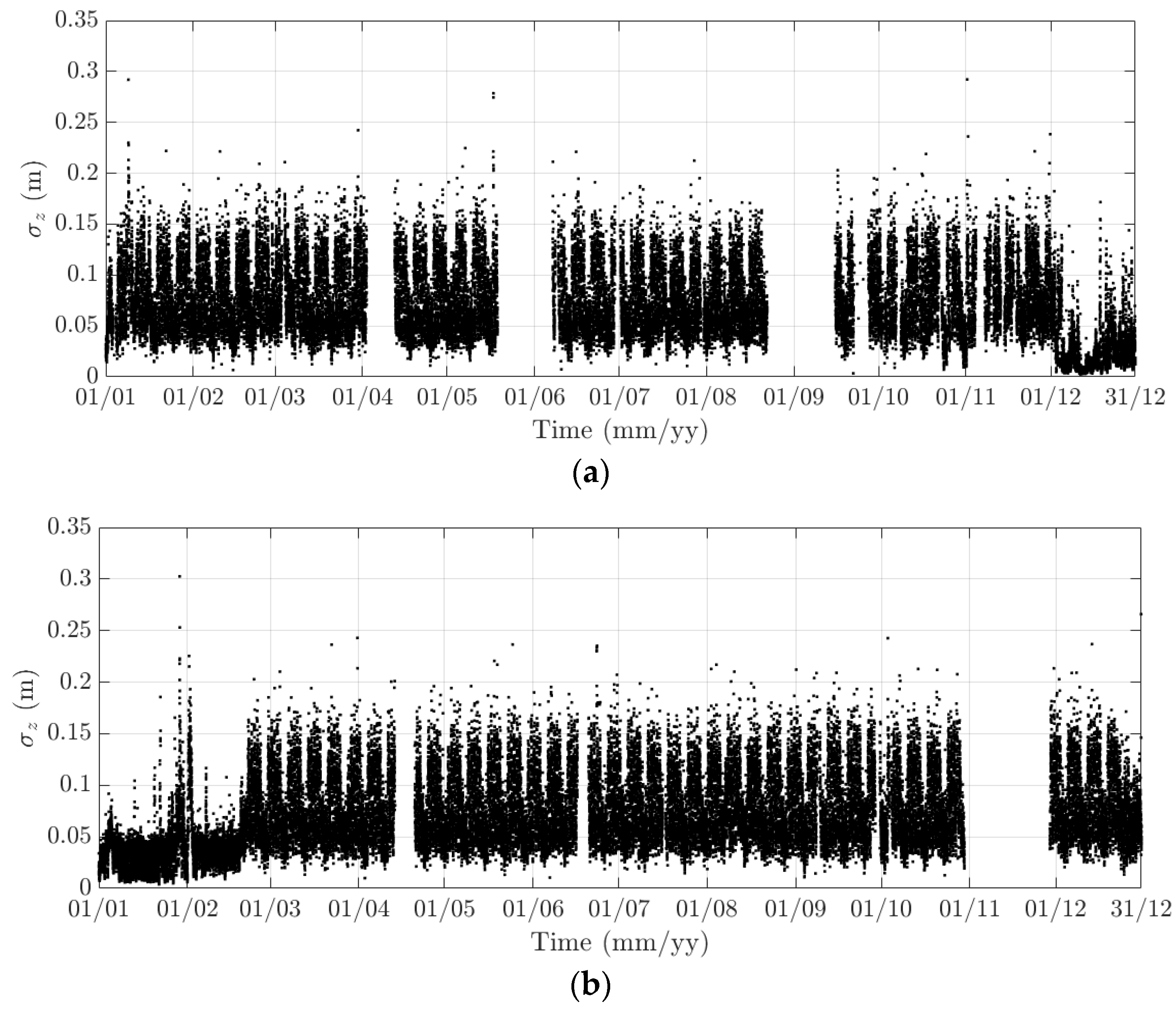
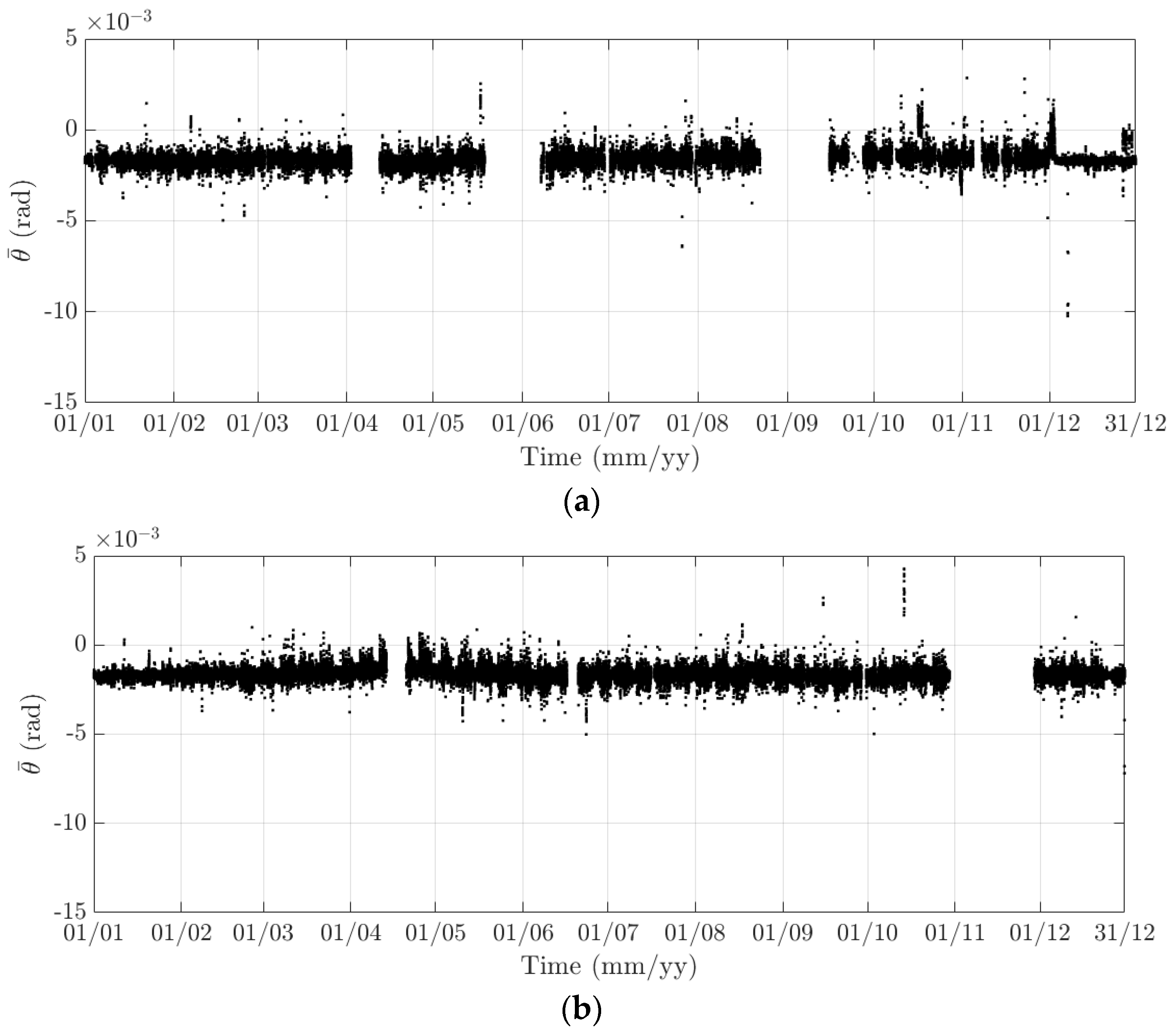
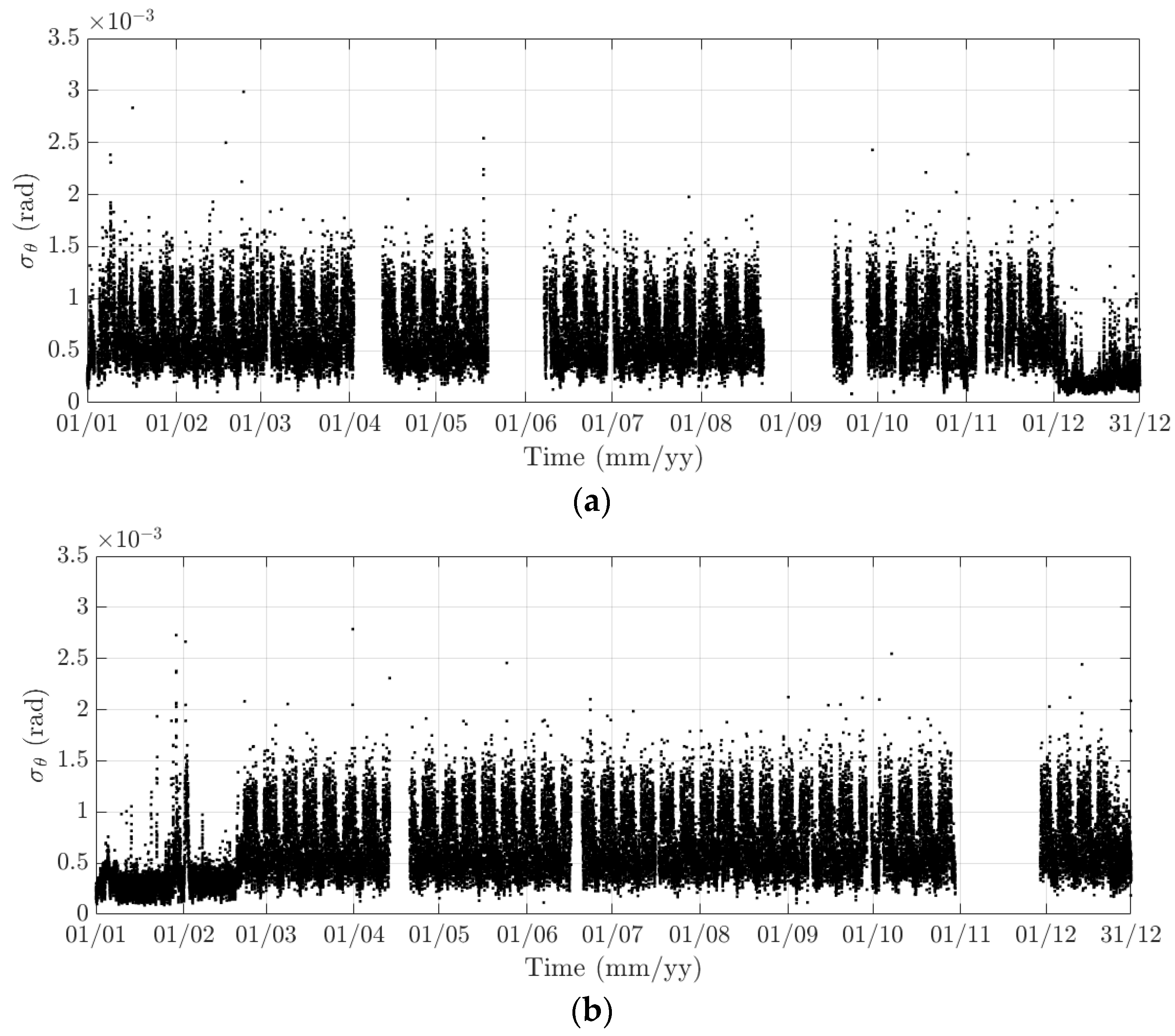
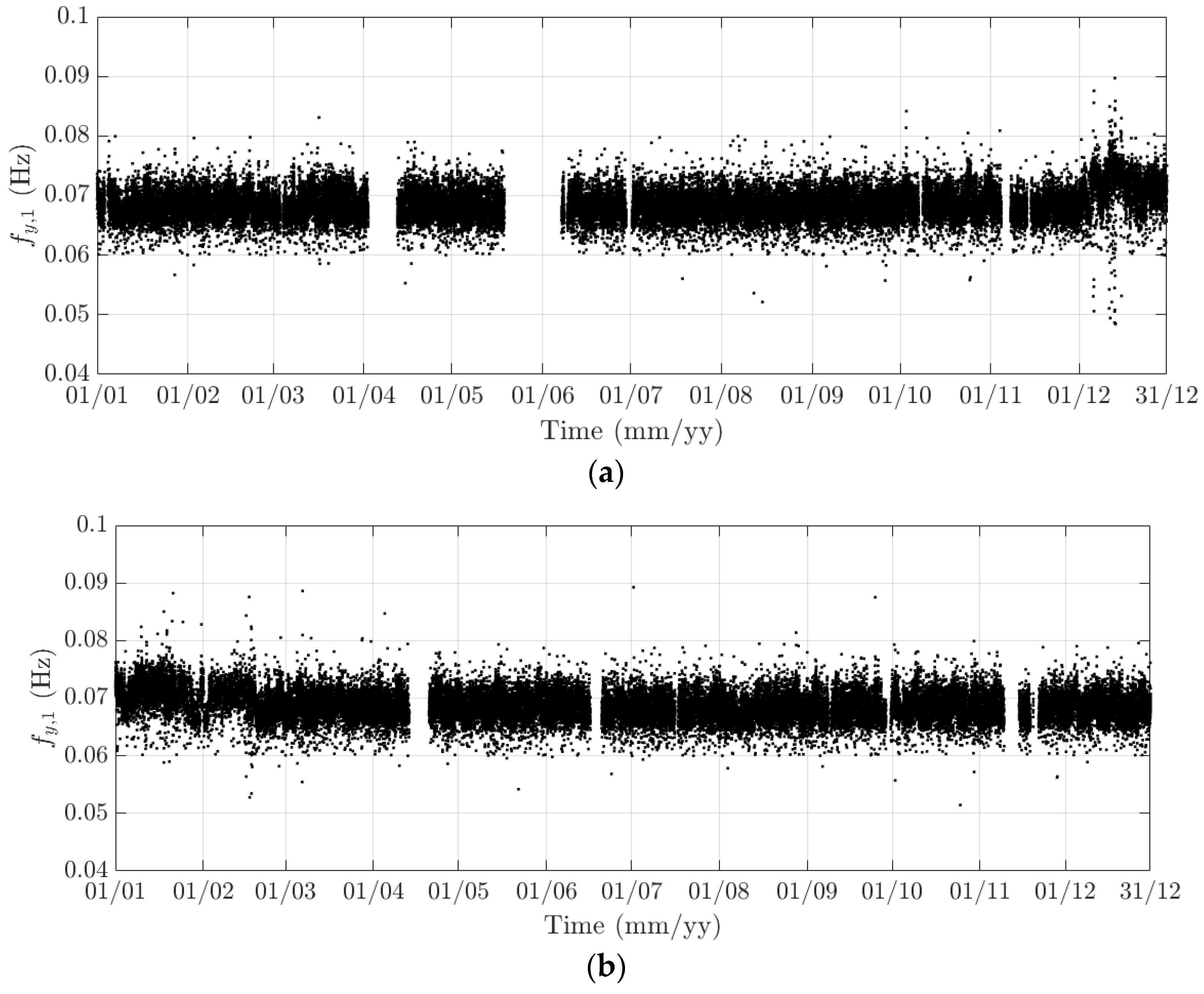
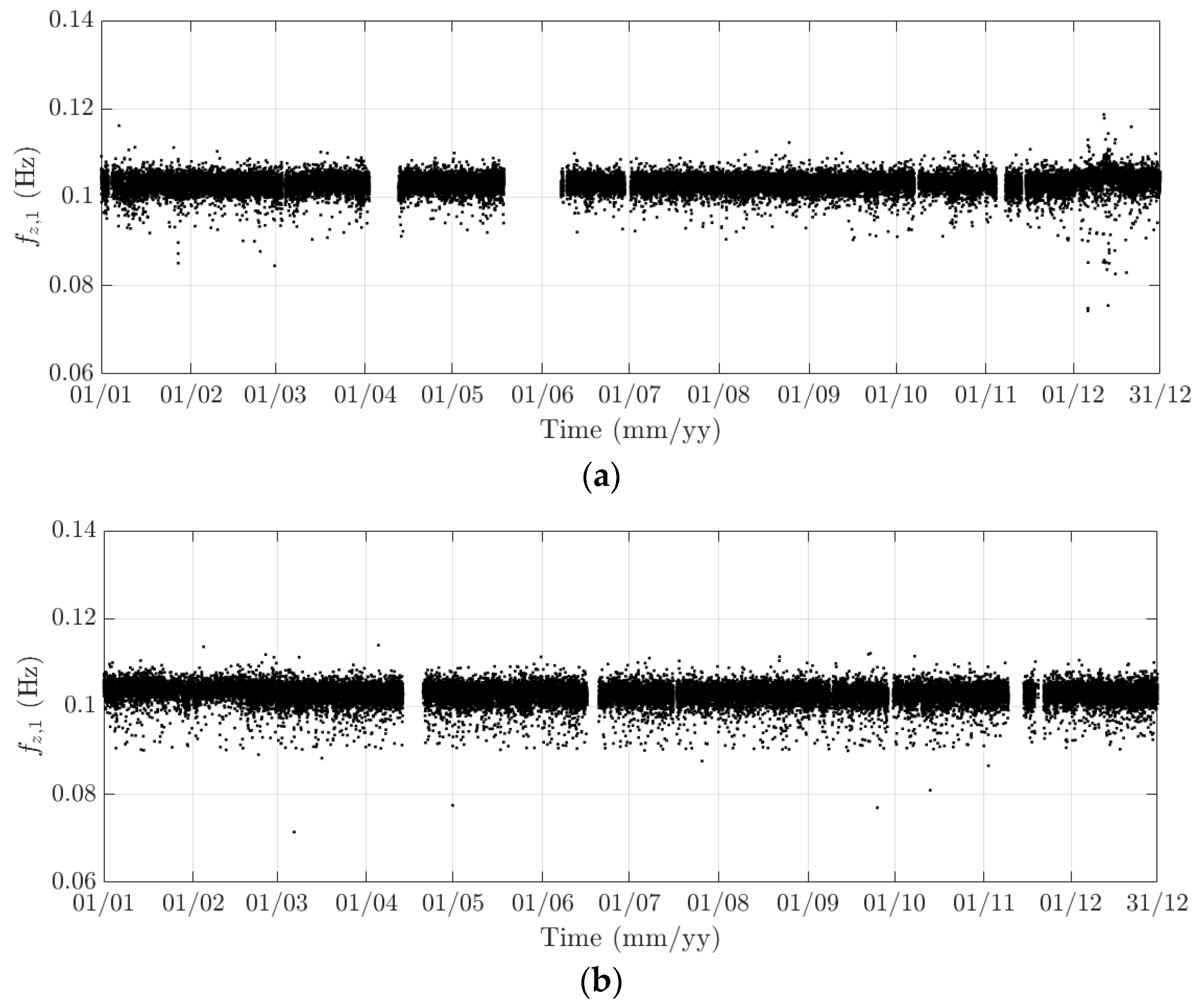
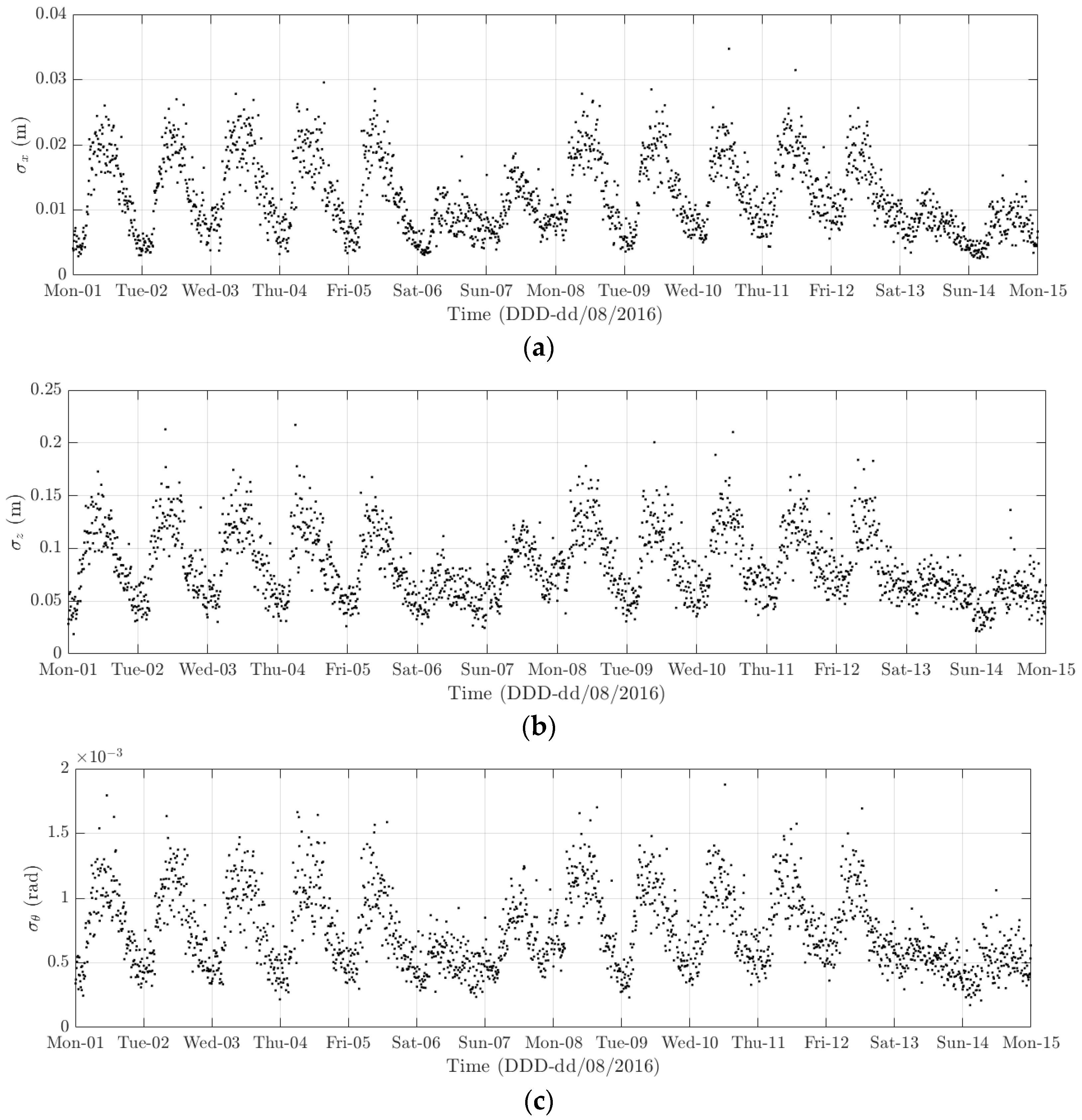
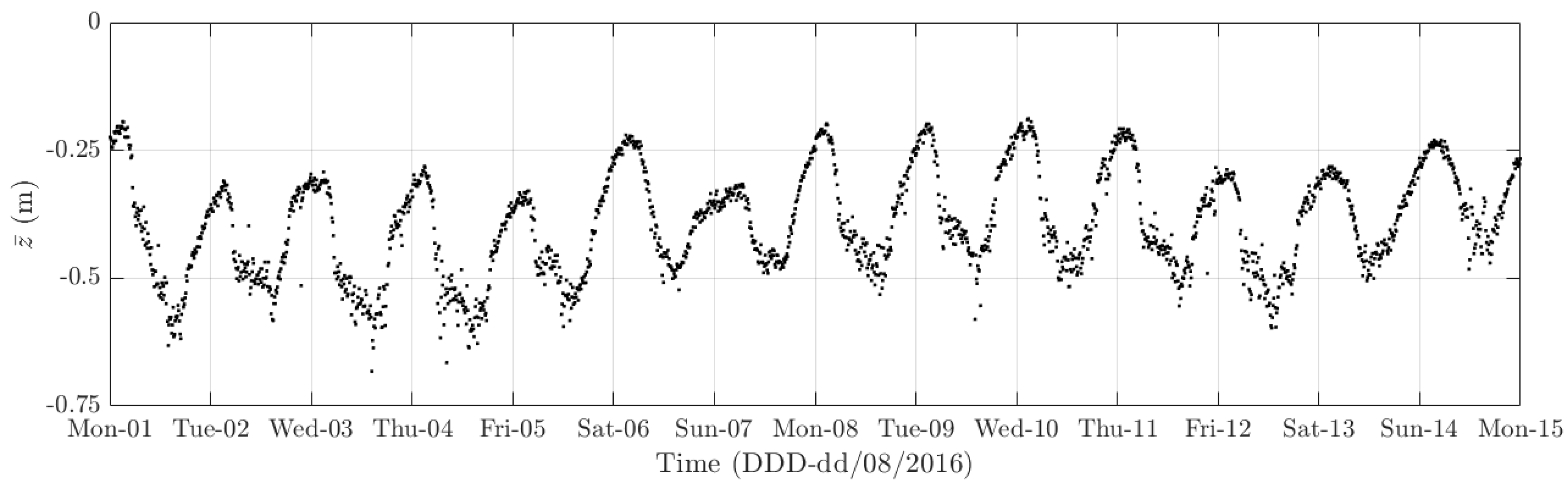
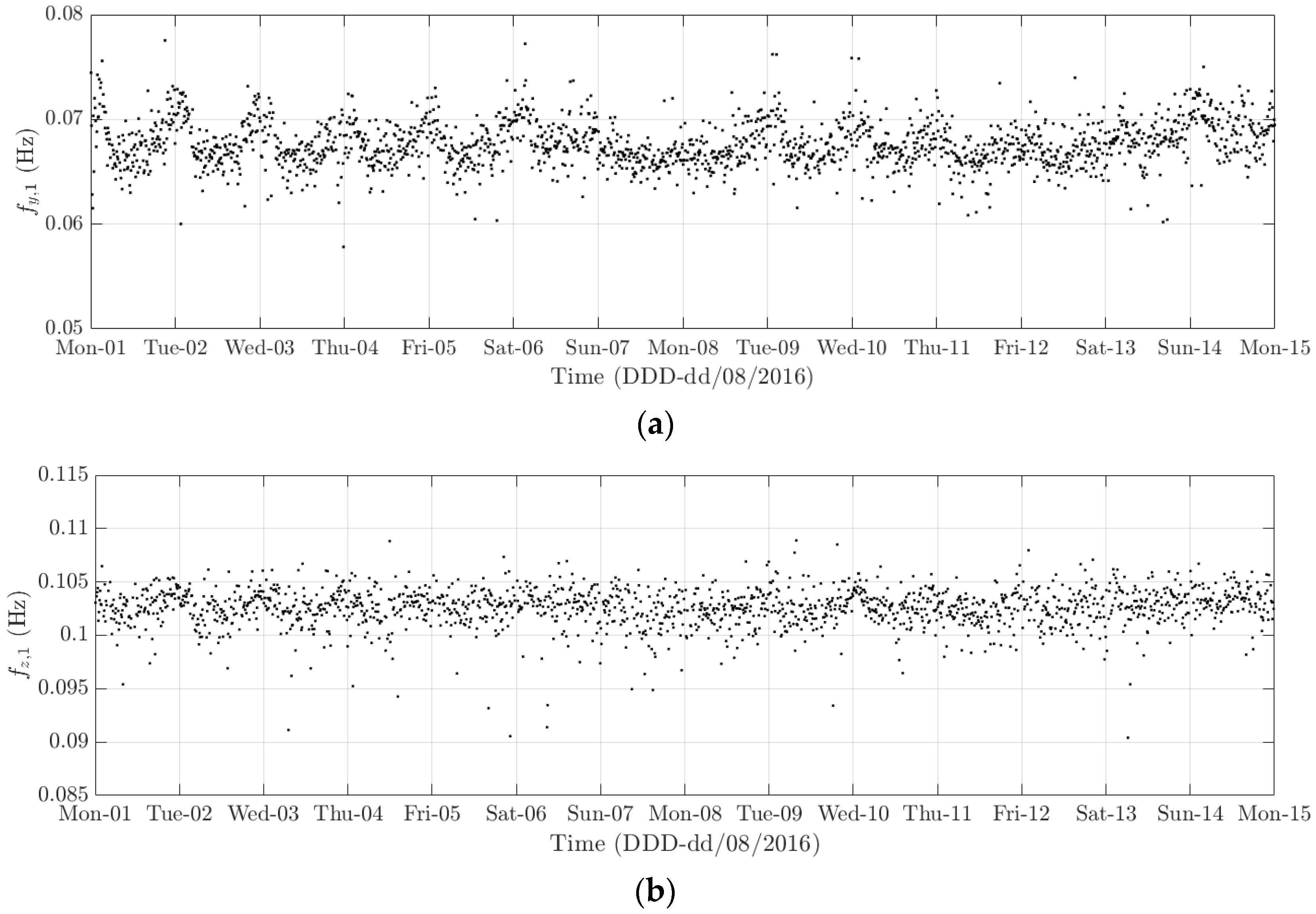
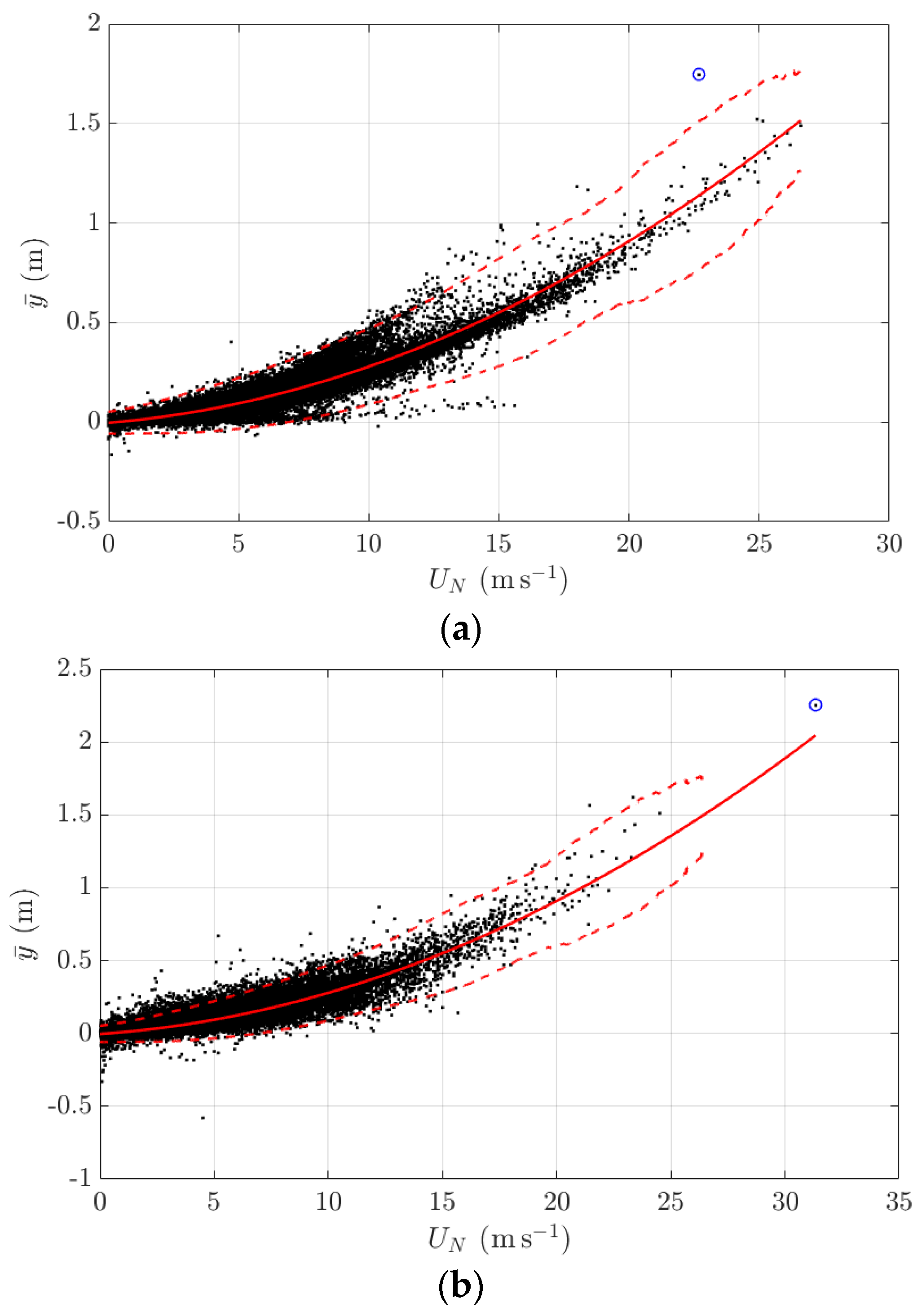
4.2. Preliminary Analysis of Bridge Deformation
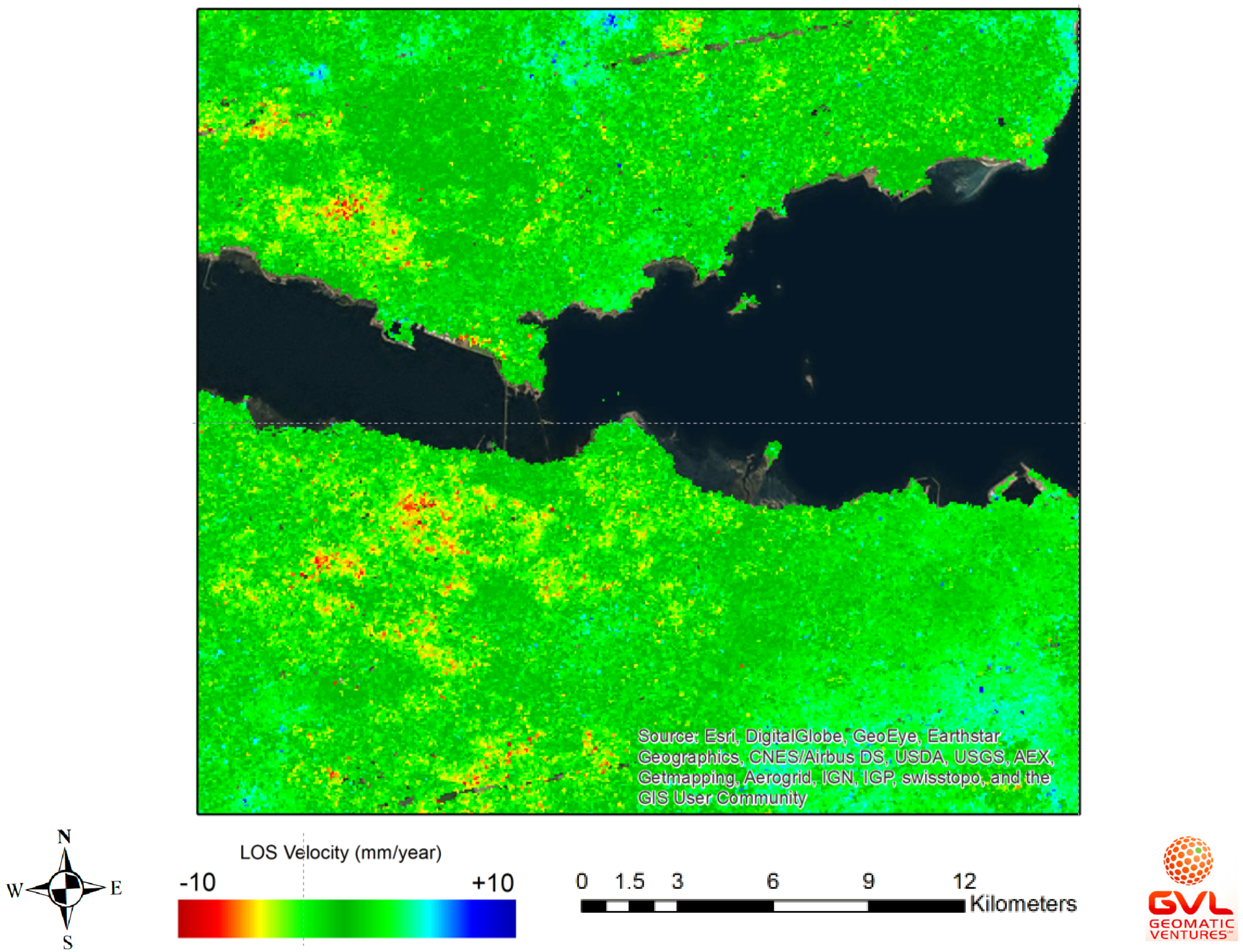
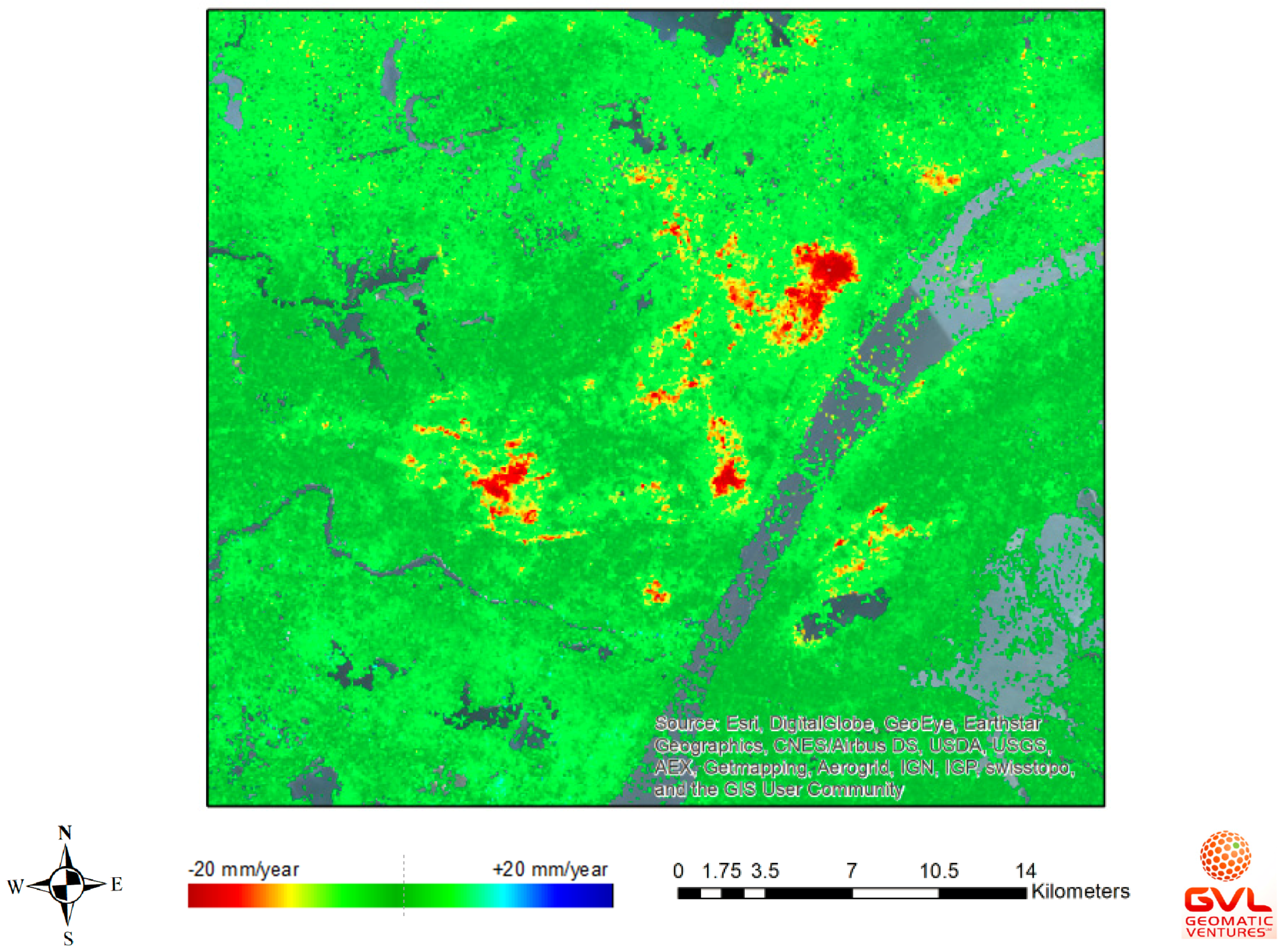
4.3. Preliminary Analysis of InSAR Images
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Failure Knowledge Database. Available online: www.shippai.org/fkd/en/cfen/CD1000144.html (accessed on 3 February 2018).
- Liao, M.; Okazaki, T. A Computational Study of the I-35W Bridge Collapse (CTS 09-29); Centre for Transportation Studies, University of Minnesota: Minneapolis, MN, USA, 2009. [Google Scholar]
- Billah, K.Y.; Scanlan, R.H. Resonance, Tacoma Narrows bridge failure, and undergraduate physics textbooks. Am. J. Phys. 1991, 59, 118–124. [Google Scholar] [CrossRef]
- Chan, T.H.; Yu, L.; Tam, H.Y.; Ni, Y.Q.; Liu, S.; Chung, W.; Cheng, L. Fiber bragg grating sensor for structural health monitoring of Tsing Ma Bridge: Background and experimental observation. Eng. Struct. 2006, 28, 648–659. [Google Scholar] [CrossRef]
- Xu, Y.L.; Xia, Y. Structural Health Monitoring of Long-Span Suspension Bridges; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Andersen, E.; Pederson, L. Structural monitoring of the Great Belt East Bridge. Strait Crossings 1994, 94, 189–195. [Google Scholar]
- Wang, H.; Tao, T.; Li, A.; Zhang, Y. Structural health monitoring system for Sutong cable-stayed bridge. Smart Struct. Syst. 2016, 18, 317–334. [Google Scholar] [CrossRef]
- Kurata, N.; Spencer, B.F., Jr.; Ruiz-Sandoval, M. Risk monitoring of buildings with wireless sensor networks. Struct. Control Health 2005, 12, 315–327. [Google Scholar] [CrossRef]
- Akram, V.K.; Dagdeviren, O. Breath-first search-based single-phase algorithms for bridge detection in wireless sensor networks. Sensors 2013, 13, 8786–8813. [Google Scholar] [CrossRef] [PubMed]
- Zhou, G.-D.; Yi, T.-H. Recent development on wireless sensor network technology for bridge health monitoring. Math. Probl. Eng. 2013, 2013, 1–3. [Google Scholar] [CrossRef]
- Shi, F.; Tuo, X.; Yang, S.X.; Li, H.; Shi, R. Multiple two-way time message exchange (ttme) time synchronization for bridge monitoring wireless sensor networks. Sensors 2007, 17, 1027. [Google Scholar] [CrossRef] [PubMed]
- Bhuiyan, M.Z.A.; Cao, J. Dependable structural health monitoring using wireless sensor networks. IEEE Trans. Dependable Secur. Comput. 2017, 14, 363–376. [Google Scholar] [CrossRef]
- Bao, X.; Chen, L. Recent progress in distributed fiber optic sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef] [PubMed]
- Li, H.-N.; Li, D.-S.; Ren, L.; Yi, T.-H.; Jia, Z.-G.; Li, K.-P. Structural health monitoring of innovative civil engineering structures in mainland China. Struct. Monit. Maint. 2016, 3, 1–32. [Google Scholar] [CrossRef]
- Li, H.; Ou, J.; Zhou, Z. Application of optical fiber Bragg gratings sensing technology-based smart stay cables. Opt. Lasers Eng. 2009, 47, 1077–1084. [Google Scholar] [CrossRef]
- Li, D.; Zhou, Z.; Ou, J. Dynamic behavior monitoring and damage evaluation for arch bridge suspender using GFRP optical fiber Bragg grating sensors. Opt. Lasers Technol. 2012, 44, 1031–1038. [Google Scholar] [CrossRef]
- Li, H.-N.; Li, D.-S.; Song, G.-B. Recent applications of fiber optic sensors to health monitoring in civil engineering. Eng. Struct. 2004, 26, 1647–1657. [Google Scholar] [CrossRef]
- Meng, X. Real-Time Deformation Monitoring of Bridges Using GPS/Accelerometers. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 2002. [Google Scholar]
- Meng, X.; Roberts, G.W.; Dodson, A.; Cosser, E.; Barnes, J.; Rizos, C. Impact of GPS satellite and pseudolite geometery on structural deformation monitoring: Analytical and empirical studies. J. Geodesy 2004, 77, 809–822. [Google Scholar] [CrossRef]
- Meng, X.; Roberts, G.W.; Dodson, A.; Ince, S.; Waugh, S. GNSS for structural deformation and deflection monitoring: Implementation and data analysis. In Proceedings of the 3rd IAG/12th FIG Symposium, Baden, Germany, 22–24 May 2006. [Google Scholar]
- Li, X.; Ge, L.; Ambikairajah, E.; Rizos, C.; Tamura, Y.; Yoshida, A. Full-scale structural monitoring using an intergrated GPS and accelerometer system. GPS Solut. 2006, 10, 233–247. [Google Scholar] [CrossRef]
- Xu, L.; Guo, J.; Jiang, J. Time-frequency analysis of a suspension bridge based on GPS. J. Sound Vib. 2002, 245, 105–116. [Google Scholar] [CrossRef]
- Watson, C.; Watson, T.; Coleman, R. Structural monitoring of cable-stayed bridges: Analysis of GPS versus modeled deflections. J. Surv. Eng. 2007, 133, 23–28. [Google Scholar] [CrossRef]
- Roberts, G.W.; Brown, C.J.; Meng, X.; Ogundipe, O.; Atkins, C.; Colford, B. Deflection and frequency monitoring of the Forth Road Bridge, Scotland, by GPS. Proc. Inst. Civ. Eng. Bridge Eng. 2012, 165, 105–123. [Google Scholar] [CrossRef]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of dynamic displacements and model frequencies of a medium-span suspension bridge using multimode GNSS processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Dynamic multipath in structural bridge monitoring: An experimental approach. GPS Solut. 2014, 18, 209–218. [Google Scholar] [CrossRef]
- Roberts, G.W.; Cosser, E.; Meng, X.; Dodson, A. High frequency deflection monitoring of bridges by GPS. J. Glob. Position. 2004, 3, 226–231. [Google Scholar] [CrossRef]
- Tamura, Y.; Matui, M.; Panini, L.-C.; Ishibashi, R.; Yoshida, A. Measurement of wind-induced response of buildings using RTK-GPS. J. Wind Eng. Ind. Aerodyn. 2002, 90, 1783–1793. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.; Roberts, G.W. Detecting bridge dynamics with GPS and triaxial accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Roberts, G.W.; Meng, X.; Dodson, A. The use of kinematic GPS and triaxial accelerometers to monitor the deflection of large bridges. In Proceedings of the 10th International Symposium on Deformation Measurement, Orange, CA, USA, 19–22 March 2001. [Google Scholar]
- Meng, X.; Wang, J.; Han, H. Optimal GPS/accelerometer integration algorithm for monitoring the vertical structural dynamics. J. Appl. Geodesy 2014, 8, 265–272. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Measurement of the dynamic displacements and of the modal frequencies of a short-span pedestrian bridges using GPS and an accelerometer. Eng. Struct. 2011, 33, 10–17. [Google Scholar] [CrossRef]
- Xiong, C.; Lu, H.; Zhu, J. Operational model analysis of bridge structures using data from GNSS/accelerometer measurements. Sensors 2017, 17, 436. [Google Scholar] [CrossRef] [PubMed]
- Sumitoro, S.; Matsui, Y.; Kono, M.; Okamoto, T.; Fujii, K. Long span bridge health monitoring system in Japan. In Proceedings of the 6th Annual International Symposium on NDE for Health Monitoring and Diagnostics, Newport Beach, CA, USA, 4–8 March 2011. [Google Scholar]
- Meng, X.; Xie, Y.; Bhatia, P.; Sowter, A.; Psimoulis, P.; Colford, B.; Ye, J.; Skicko, M.; Dimauro, M.; Ge, M. Research and development of a pilot project using GNSS and Earth Observation (GeoSHM) for structural health monitoring of the Forth Road Bridge in Scotland. In Proceedings of the Joint International Symposium on Deformation Monitoring, Vienna, Austria, 30 March–1 April 2016. [Google Scholar]
- Necati Çatbas, F.; Kijewski-Correa, T.; Emin Aktan, A. Structural Identification of Constructed Facilities: Approaches, Methods and Technologies for Effective Practice of St-Id; American Society of Civil Engineers: Reston, WV, USA, 2011. [Google Scholar]
- Chen, S.R.; Wu, J. Dynamic performance simulation of long-span bridge under combined loads of stochastic traffic and wind. J. Bridge Eng. 2010, 15, 219–230. [Google Scholar] [CrossRef]
- Okasa, N.M.; Frangopol, D.M.; Orcesi, A.D. Automated finite element updating using strain data for the lifetime reliability assessment of bridges. Reliab. Eng. Syst. Saf. 2012, 99, 139–150. [Google Scholar] [CrossRef]
- Fiore, A.; Marano, G.C. Serviceability performance analysis of concrete box girder bridges under traffic-induced vibrations by structural health monitoring: A case study. Int. J. Civ. Eng. 2017, 3, 1–13. [Google Scholar] [CrossRef]
- Goulet, J.-A.; Kripakaran, P.; Smith, I.F.C. Multimodel structural performance monitoring. J. Struct. Eng. 2010, 136, 1309–1318. [Google Scholar] [CrossRef]
- Zhang, J.; Wan, C.; Sato, T. Advanced Markov chain Monte Carlo approach for finite element calibration under uncertainty. Comput. Aided Civ. Infrastruct. Eng. 2013, 28, 522–530. [Google Scholar] [CrossRef]
- Goulet, J.-A.; Smith, I.F.C. Structural identification with systematic errors and unknown uncertainty dependencies. Comput. Struct. 2013, 128, 407–418. [Google Scholar] [CrossRef]
- Laory, I.; Trinh, T.N.; Posenato, D.; Smith, I.F.C. Combined model-free data-interpretation methodologies for damage detection during continuous monitoring of structures. J. Comput. Civ. Eng. 2013, 27, 657–666. [Google Scholar] [CrossRef]
- Cavadas, F.; Smith, I.F.C.; Figueiras, J. Damage detection using data-driven methods applied to moving load responses. Mech. Syst. Signal Process. 2013, 38, 409–425. [Google Scholar] [CrossRef]
- Pasquier, R.; D’Angelo, L.; Goulet, J.-A.; Acevedo, C.; Nussbaumer, A.; Smith, I.F.C. Measurement, data interpretation, and uncertainty propagation for fatigue assessments of structures. J. Bridge Eng. 2016, 6, 04015087. [Google Scholar] [CrossRef]
- Posenato, D.; Kripakran, P.; Inaudi, D.; Smith, I.F.C. Methodologies for model-free data interpretation of civil engineering structures. Comput. Struct. 2010, 88, 467–482. [Google Scholar] [CrossRef]
- Laory, I.; Trinh, T.N.; Smith, I.F.C.; Brownjohn, J.M.W. Methodologies for predicting natural frequency variation of a suspension bridge. Eng. Struct. 2014, 80, 211–221. [Google Scholar] [CrossRef] [Green Version]
- Cross, E.J.; Koo, K.Y.; Brownjohn, J.M.W.; Worden, K. Long-term monitoring and data analysis of the Tamar Bridge. Mech. Systs. Signal Process. 2013, 35, 16–34. [Google Scholar] [CrossRef] [Green Version]
- Dervilis, N.; Cross, E.J.; Barthorpe, R.J.; Worden, K. Robust methods of inclusive outlier analysis for structural health monitoring. J. Sound Vib. 2014, 333, 5181–5195. [Google Scholar] [CrossRef]
- Dervilis, N.; Worden, K.; Crosss, E.J. On robust regression analysis as a means of exploring environmental and operational conditions of SHM data. J. Sound Vib. 2015, 347, 279–296. [Google Scholar] [CrossRef]
- Laory, I.; Ali, N.B.H.; Trinh, T.N.; Smith, I.F.C. Measurement system configuration for damage identification of continuously monitored structures. J. Bridge Eng. 2012, 17, 857–866. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Details | Sampling Rates (Hz) |
|---|---|---|
| GNSS | Leica GR10 | 10 |
| GNSS | Panda DB38 | 1 |
| Anemometer | Gill WindMaster | 20 |
| Weather Station | Gill MetPak | 1 |
| Accelerometer | Sherborne A545-0003-2G | 100 |
| Inclinometer | Sherborne LSOP-1 | 10 |
| InSAR image | EO | 1 image/14 days |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, X.; Nguyen, D.T.; Xie, Y.; Owen, J.S.; Psimoulis, P.; Ince, S.; Chen, Q.; Ye, J.; Bhatia, P. Design and Implementation of a New System for Large Bridge Monitoring—GeoSHM. Sensors 2018, 18, 775. https://doi.org/10.3390/s18030775
Meng X, Nguyen DT, Xie Y, Owen JS, Psimoulis P, Ince S, Chen Q, Ye J, Bhatia P. Design and Implementation of a New System for Large Bridge Monitoring—GeoSHM. Sensors. 2018; 18(3):775. https://doi.org/10.3390/s18030775
Chicago/Turabian StyleMeng, Xiaolin, Dinh Tung Nguyen, Yilin Xie, John S. Owen, Panagiotis Psimoulis, Sean Ince, Qusen Chen, Jun Ye, and Paul Bhatia. 2018. "Design and Implementation of a New System for Large Bridge Monitoring—GeoSHM" Sensors 18, no. 3: 775. https://doi.org/10.3390/s18030775
APA StyleMeng, X., Nguyen, D. T., Xie, Y., Owen, J. S., Psimoulis, P., Ince, S., Chen, Q., Ye, J., & Bhatia, P. (2018). Design and Implementation of a New System for Large Bridge Monitoring—GeoSHM. Sensors, 18(3), 775. https://doi.org/10.3390/s18030775