Multi-Residential Activity Labelling in Smart Homes with Wearable Tags Using BLE Technology




Abstract
:1. Introduction
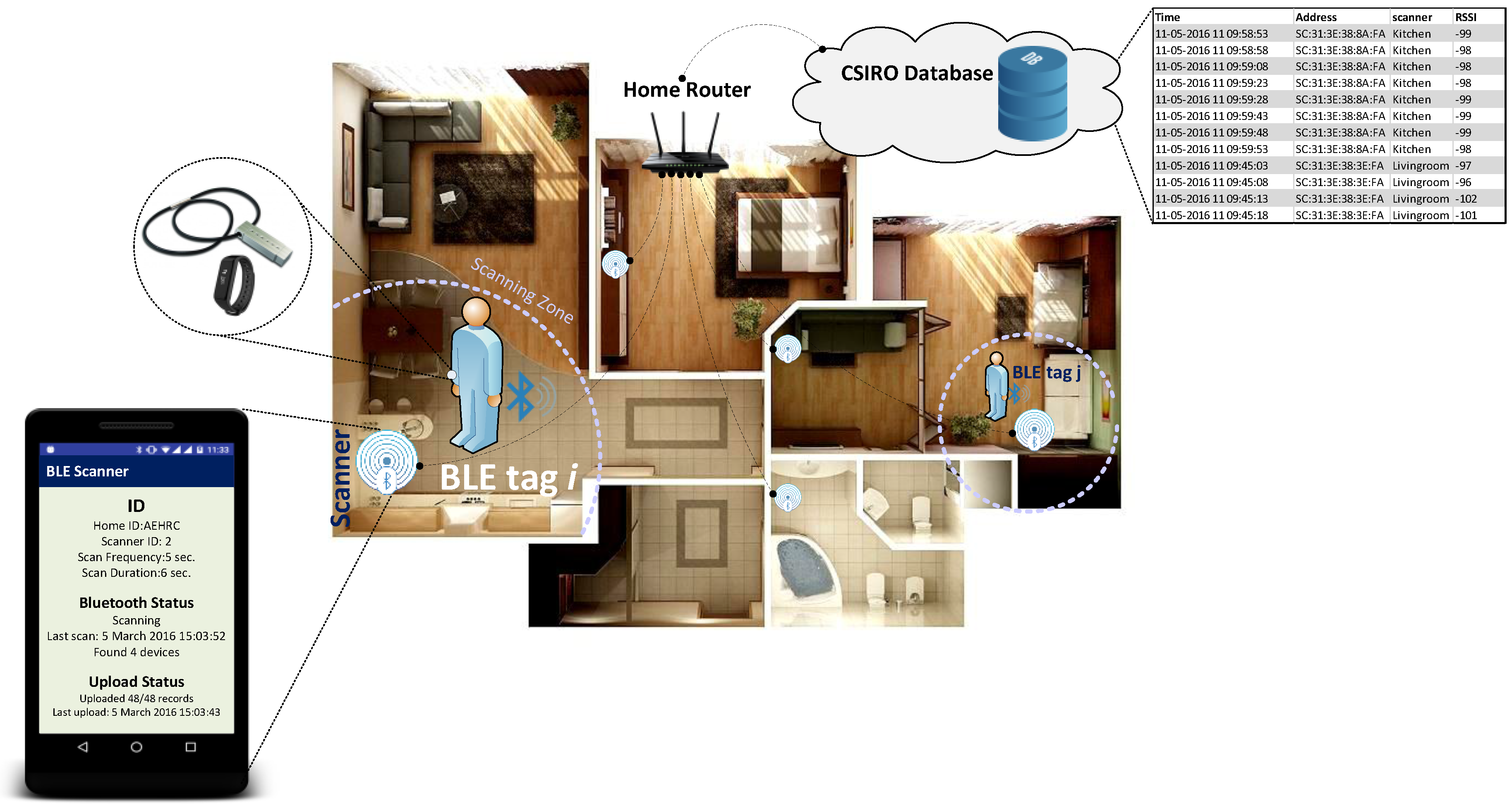
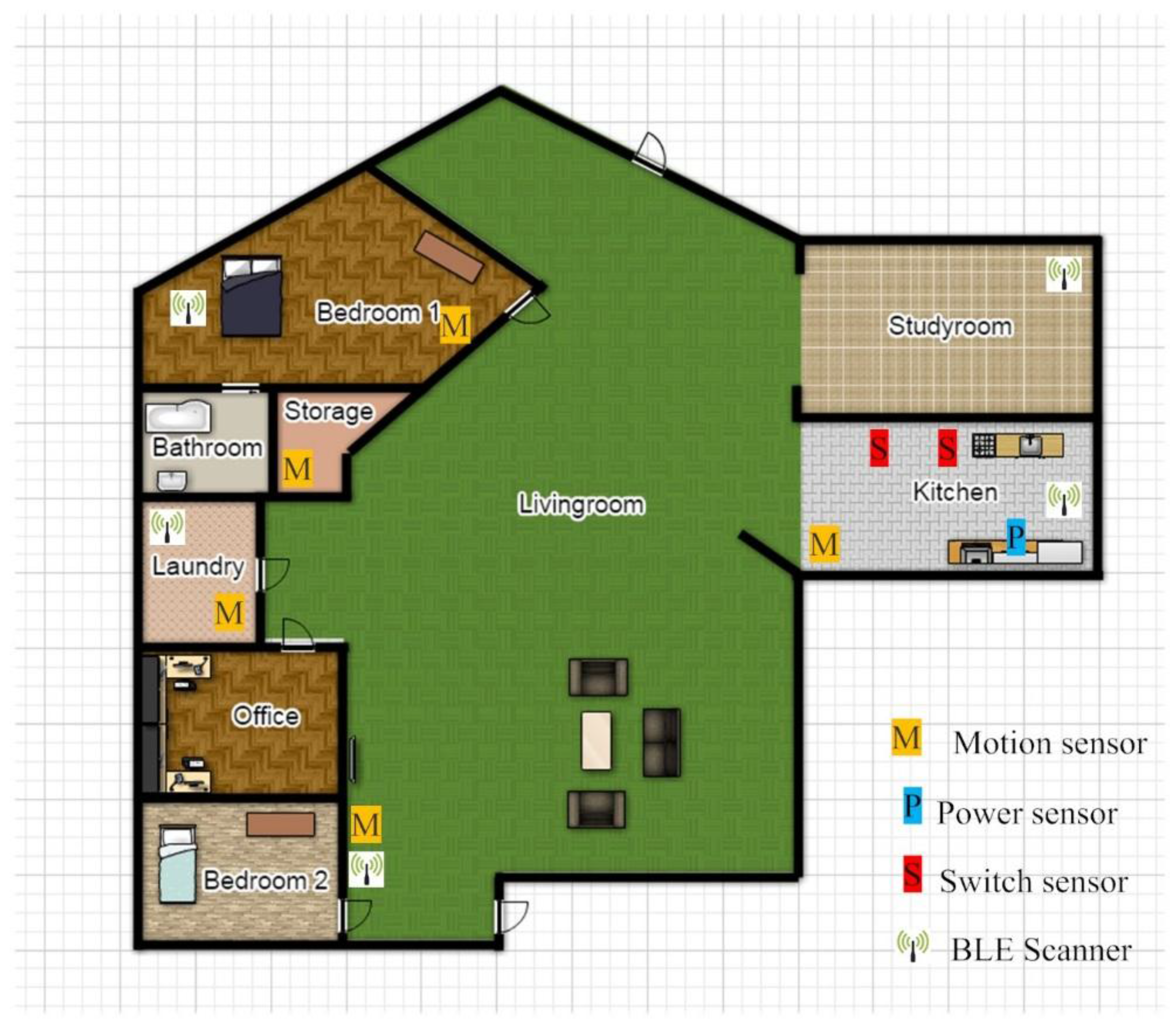
- Room-level accuracy is considered as the required accuracy for localization in smart home applications. In this system, the resident is carrying a BLE tag as his/her identity, which broadcasts a unique ID in a specific time interval.
- To handle energy error issues, BLE scanners are optimally allocated in each room; they listen to the advertising packet and RSSI index to detect the presence of the resident in a given room.
- A comprehensive study is conducted to examine the impacts of broadcasting parameters on RSSI and to design a high accuracy localization approach.
- The possibility of knowledge extraction from other sensory networks for better localization is explored. As there are activity sensors installed in different rooms for the purpose of activity recognition, it is shown that the data from these sensors can also be used to improve the accuracy of localization and activity labeling.
2. Localization in Smart Homes Using BLE Technology
- Step 1: For each time interval T, all of the RSSI for the tag, scanned by different scanners, are recorded.
- Step 3: Based on the representative RSSI of the tag, the resident is in the room with the scanner with the maximum RSSI value.
3. Choose Optimal Advertising Parameters
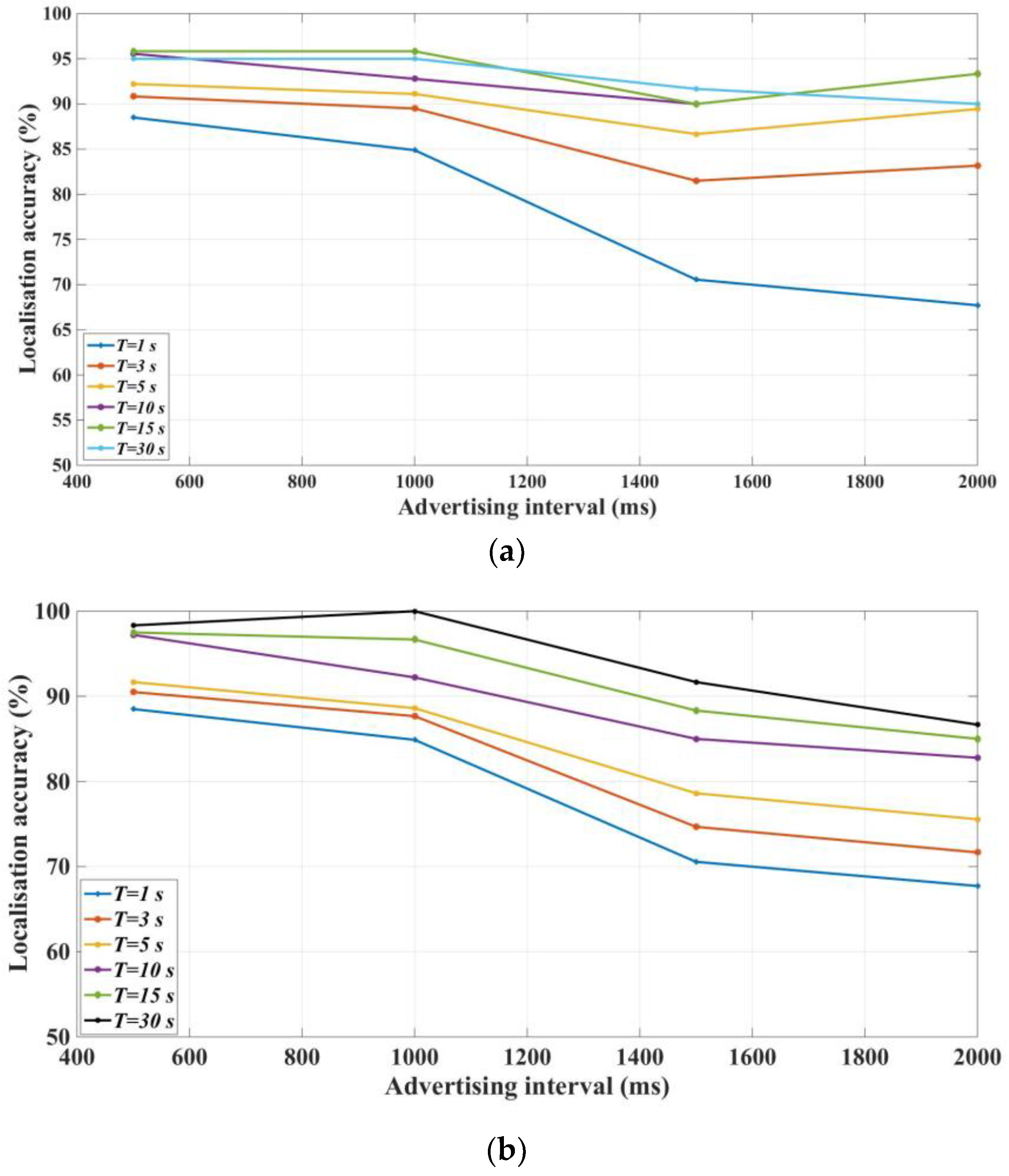
3.1. Impact of the Advertising Time Interval
- The localization accuracy is nearly constant for an advertising interval <1000 ms.
- The localization accuracy does not decline considerably when T is more than 5 s.
- The localization accuracy is maximized at T = 15 s.
- The localization accuracy is nearly constant for an advertising interval <1000 ms.
- The localization accuracy declines considerably for advertising intervals more than 1000 ms.
- The localization accuracy increases when the time step increases.
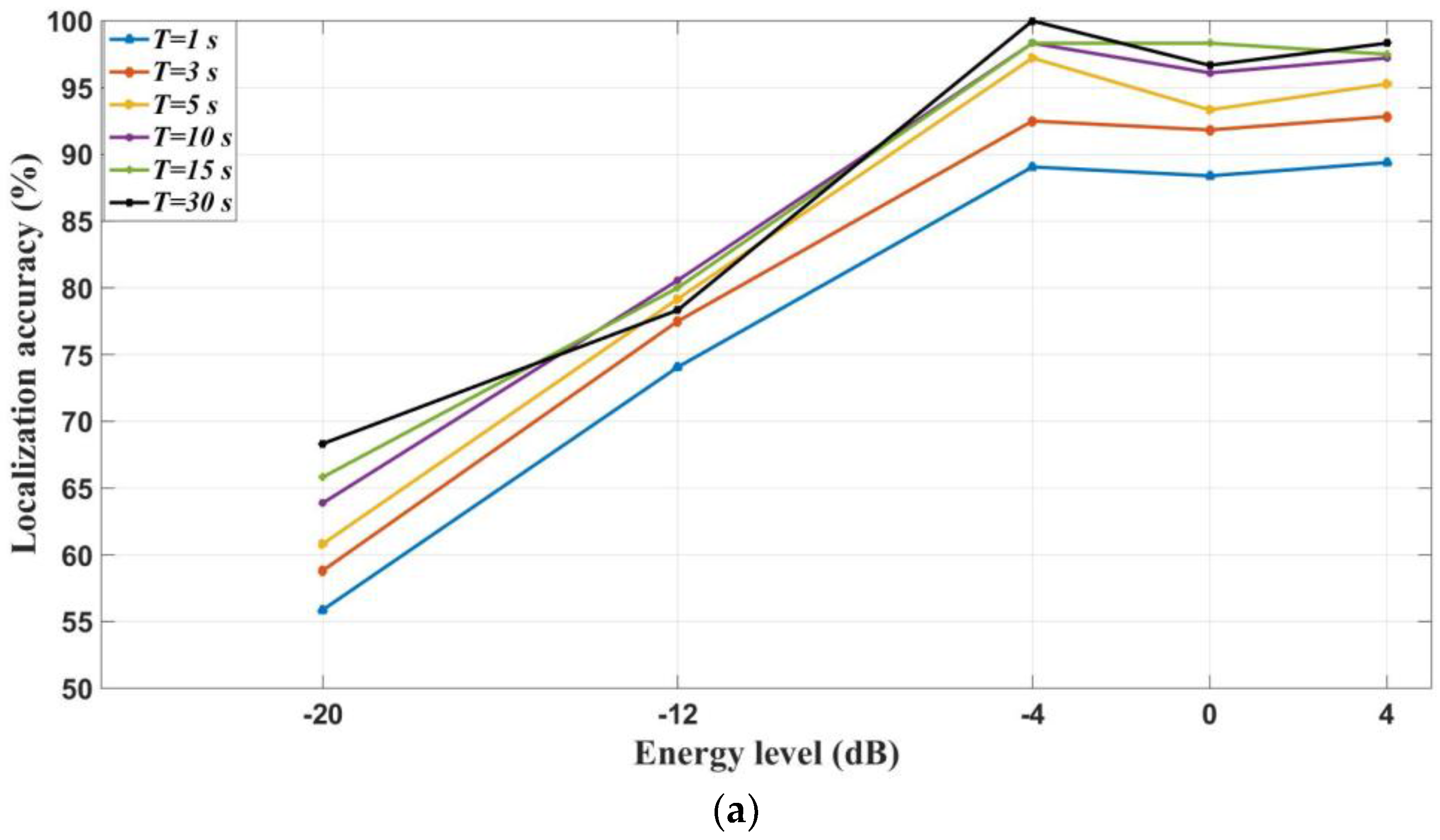
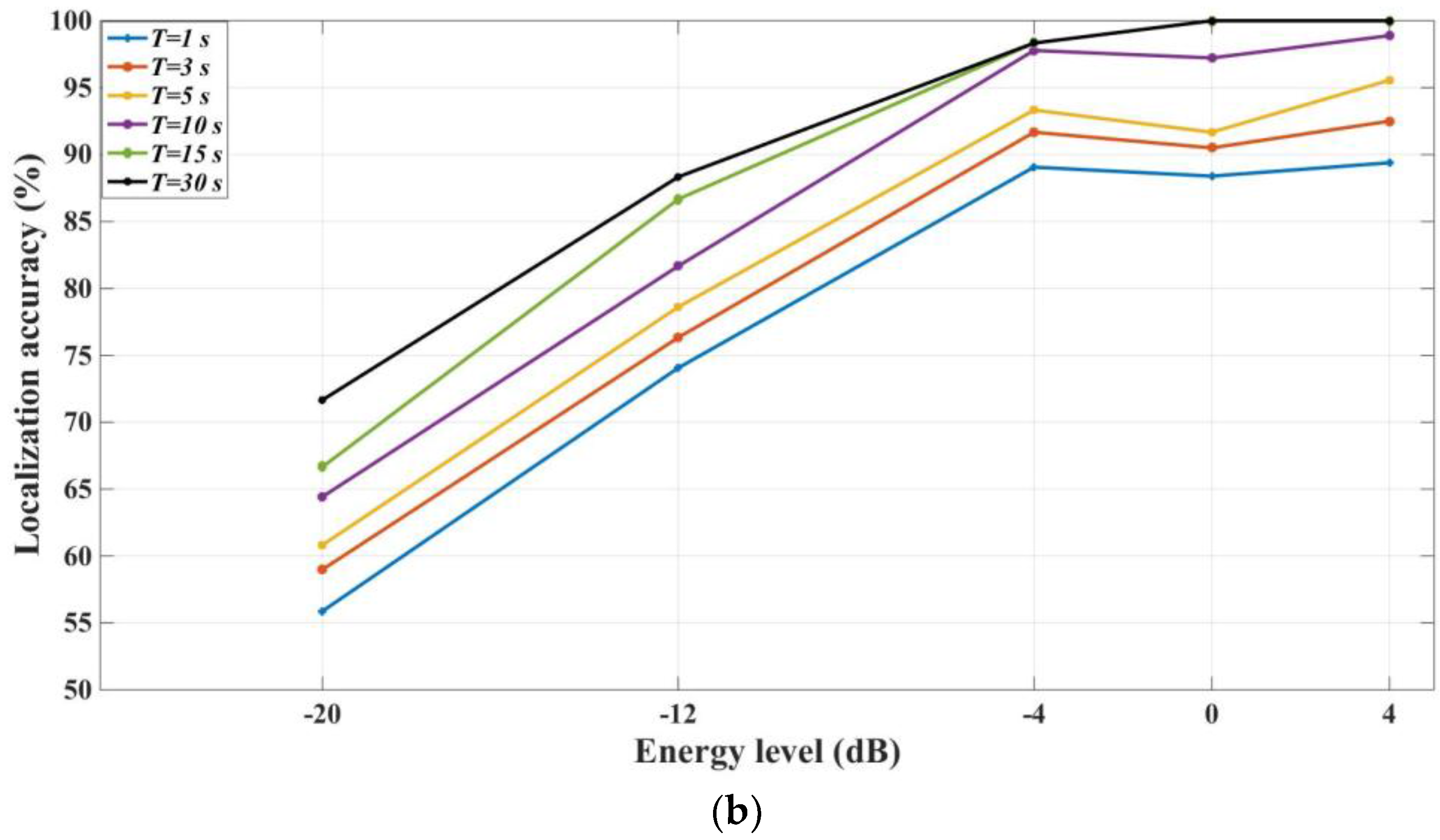
3.2. Impact of the Advertising Power Level
- Power level 4 has better results for the p-RSSI index. This means that with a higher advertising power level, the fluctuation of RSSI caused by environments can be mitigated effectively.
- The accuracy is continuously increasing with the increasing of the advertising power level.
- The localization accuracy is maximized when T = 30 s.
4. Integrating Activity Sensors to Improve Accuracy
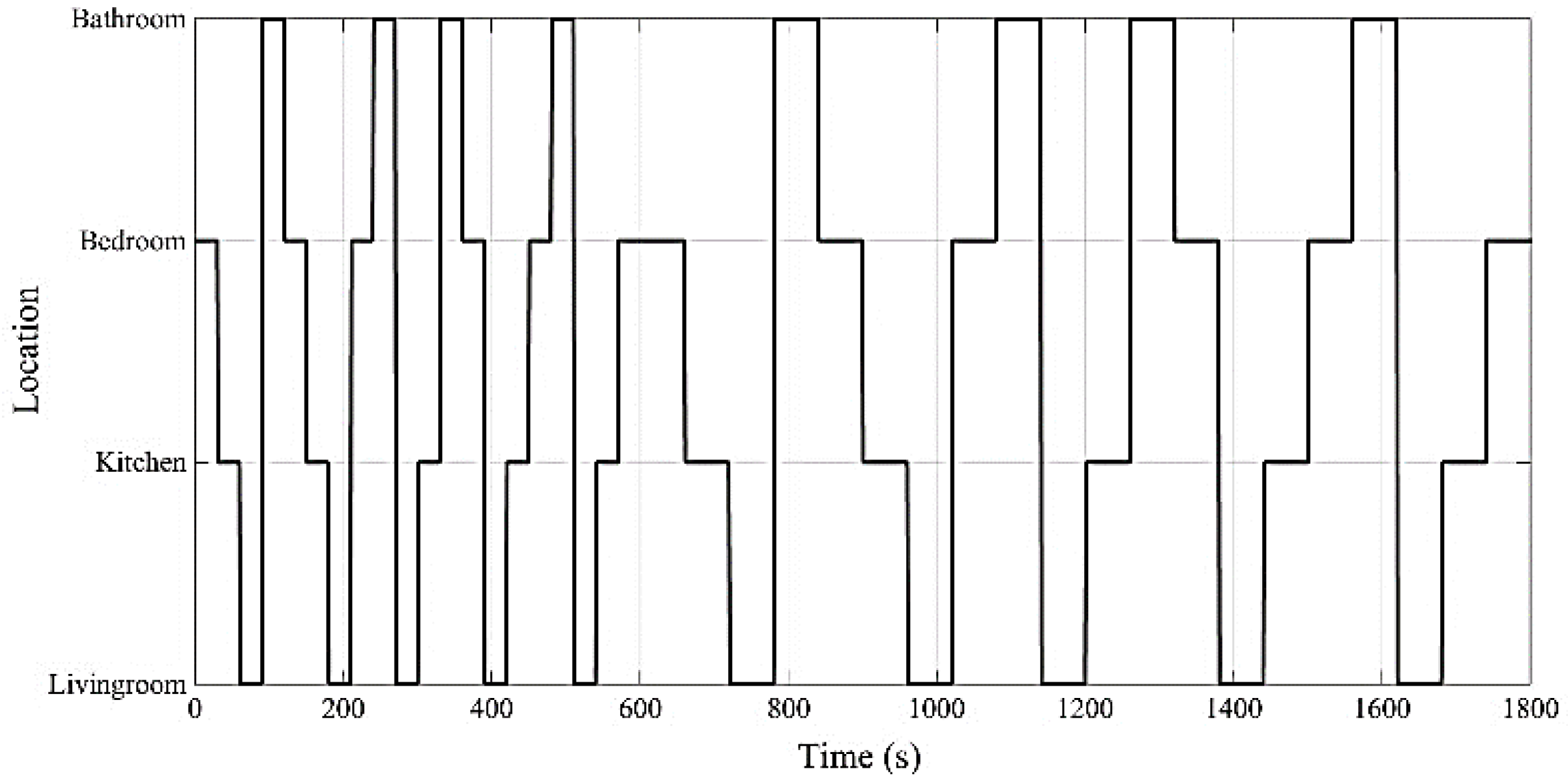
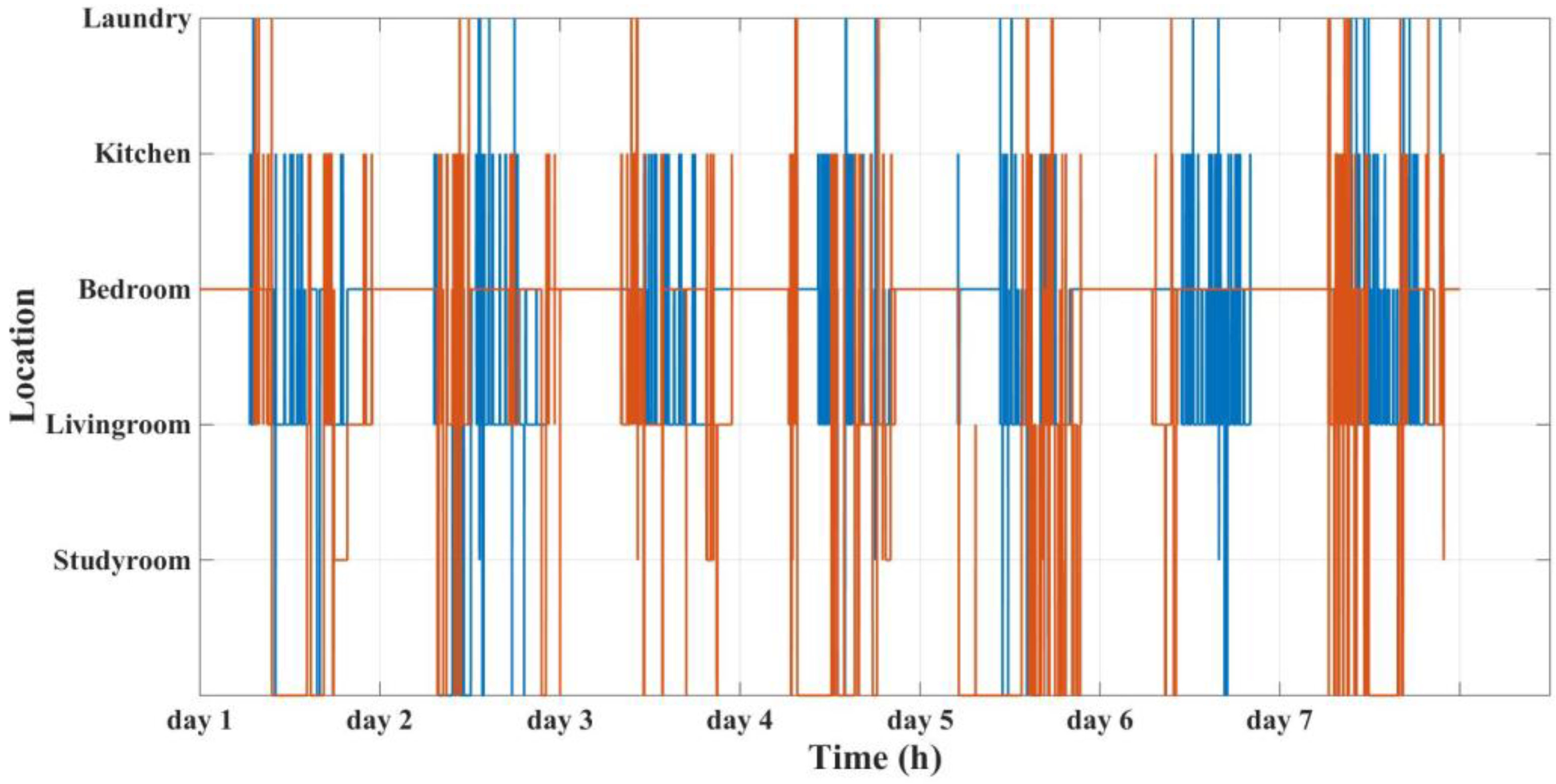
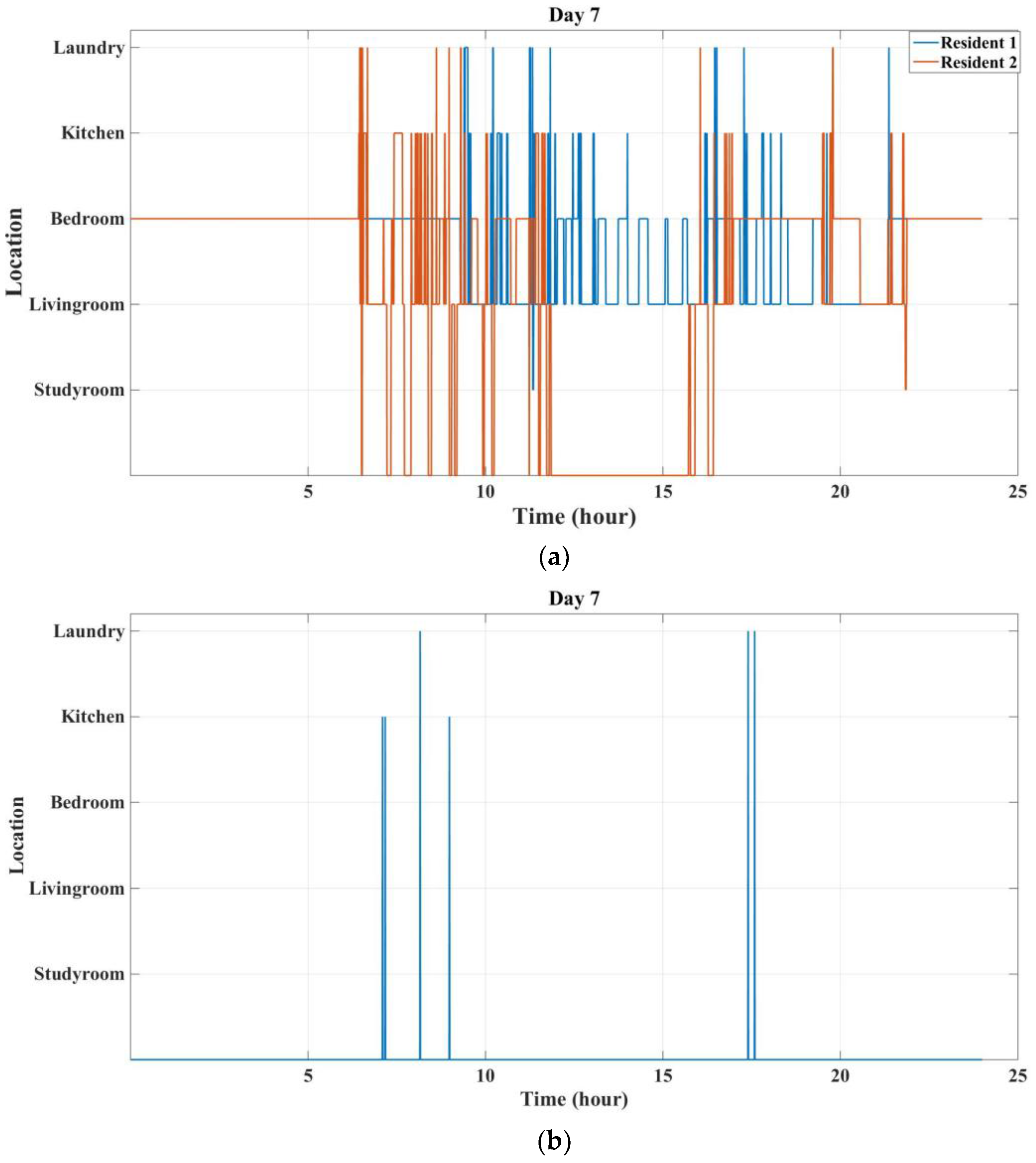
5. Multi-Residential Activity Labelling Using BLE Localization Technology
6. Conclusions
Author Contributions
Conflicts of Interest
Ethical Approval
References
- Kofler, M.J.; Reinisch, C.; Kastner, W. A semantic representation of energy-related information in future smart homes. Energy Build. 2012, 47, 169–179. [Google Scholar] [CrossRef]
- Anvari-Moghaddam, A.; Rahimi-Kian, A.; Monsef, H. Optimal smart home energy management considering energy saving and a comfortable lifestyle. IEEE Trans. Smart Grid 2015, 6, 324–332. [Google Scholar] [CrossRef]
- Shakeri, M.; Shayestegan, M.; Abunima, H.; Reza, S.M.S.; Akhtaruzzaman, M.; Alamoud, A.R.M.; Sopian, K.; Amin, N. An intelligent system architecture in home energy management systems (HEMS) for efficient demand response in smart grid. Energy Build. 2017, 138, 154–164. [Google Scholar] [CrossRef]
- Anvari-Moghaddam, A.; Rahimi-Kian, A.; Mirian, M.S.; Guerrero, J.M. A multi-agent based energy management solution for integrated buildings and microgrid system. Appl. Energy 2017, 203, 41–56. [Google Scholar] [CrossRef]
- Ayuningtyas, C.; Leitner, G.; Hitz, M.; Funk, M.; Hu, J.; Rauterberg, M. Activity monitoring for multi-inhabitant smart homes. SPIE Newsroom 2014. [Google Scholar] [CrossRef]
- Krumm, J.; Harris, S.; Meyers, B.; Brumitt, B.; Hale, M.; Shafer, S. Multi-camera multi-person tracking for easyliving. In Proceedings of the Third IEEE International Workshop on Visual Surveillance, Dublin, Ireland, 1 July 2000; pp. 3–10. [Google Scholar]
- Altaf, M.U.; Butko, T.; Juang, B.-H. Acoustic Gaits: Gait Analysis with Footstep Sounds. IEEE Trans. Biomed. Eng. 2015, 9294, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Yun, J.; Lee, S.-S. Human movement detection and identification using pyroelectric infrared sensors. Sensors 2014, 14, 8057–8081. [Google Scholar] [CrossRef] [PubMed]
- Mokhtari, G.; Zhang, Q.; Nourbakhsh, G.; Ball, S.; Karunanithi, M. BLUESOUND: A new resident identification sensor—Using ultrasound array and BLE technology for smart home platform. IEEE Sens. J. 2017, 17, 1503–1512. [Google Scholar] [CrossRef]
- Mokhtari, G.; Zhang, Q.; Hargrave, C.; Ralston, J.C. Non-wearable UWB sensor for human identification in smart home. IEEE Sens. J. 2017, 17, 3332–3340. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Yang, Z.; Patwari, N. RFID Localization in Wireless Sensor Networks. In Radio Frequency Identification Pimentaed; Crepaldi, P.C., Pimenta, T.C., Eds.; InTech: Rijeka, Croatia, 2017; Chapter 3. [Google Scholar]
- Yunfei, M.; Selby, N.; Singh, M.; Adib, F. Fine-Grained RFID Localization via Ultra-Wideband Emulation. In Proceedings of the SIGCOMM Posters and Demos, SIGCOMM Posters and Demos ’17, Los Angeles, CA, USA, 22–24 August 2017; ACM: New York, NY, USA, 2017; pp. 116–118. [Google Scholar]
- Mokhtari, G.; Zhang, Q.; Karunanithi, M. Modeling of human movement monitoring using Bluetooth Low Energy technology. In Proceedings of the 37th Annual International Conference of the IEEE on Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 5066–5069. [Google Scholar]
- Blas, A.; López-de-Ipiña, D. Improving Trilateration for Indoors Localization Using BLE Beacons. In Proceedings of the 2017 2nd International Multidisciplinary Conference on Computer and Energy Science (SpliTech), Split, Croatia, 12–14 July 2017; pp. 1–6. [Google Scholar]
- Ciabattoni, L.; Foresi, G.; Monteriù, A.; Pepa, L.; Proietti Pagnotta, D.; Spalazzi, L.; Verdinim, F. Real Time Indoor Localization Integrating a Model Based Pedestrian Dead Reckoning on Smartphone and BLE Beacons. J. Ambient Intell. Hum. Comput. 2017. [Google Scholar] [CrossRef]
- Terán, M.; Aranda, J.; Carrillo, H.; Mendez, D.; Parra, C. IoT-Based System for Indoor Location Using Bluetooth Low Energy. In Proceedings of the 2017 IEEE Colombian Conference on Communications and Computing (COLCOM), Cartagena, Colombia, 16–18 August 2017; pp. 1–6. [Google Scholar]
- Neburka, J.; Tlamsa, Z.; Benes, V.; Polak, L.; Kaller, O.; Bolecek, L.; Sebesta, J.; Kratochvil, T. Study of the Performance of RSSI Based Bluetooth Smart Indoor Positioning. In Proceedings of the 26th International Conference Radioelektronika, RADIOELEKTRONIKA, Kosice, Slovakia, 19–20 April 2016; pp. 121–125. [Google Scholar] [CrossRef]
- Daniş, F.S.; Taylan, A.C. Model-Based Localization and Tracking Using Bluetooth Low-Energy Beacons. Sensors 2017, 17, 2484. [Google Scholar] [CrossRef] [PubMed]
- Pelant, J.; Tlamsa, Z.; Benes, V.; Polak, L.; Kaller, O.; Bolecek, L.; Kufa, J.; Sebesta, J.; Kratochvil, T. BLE Device Indoor Localization Based on RSS Fingerprinting Mapped by Propagation Modes. In Proceedings of the 2017 27th International Conference Radioelektronika, RADIOELEKTRONIKA, Brno, Czech Republic, 19–20 April 2017. [Google Scholar]
- Xiong, J.; Li, F.; Zhao, N.; Jiang, N. Tracking and recognition of multiple human targets moving in a wireless pyroelectric infrared sensor network. Sensors 2014, 14, 7209–7228. [Google Scholar] [CrossRef] [PubMed]
- Shahryari, O.-K.; Anvari-Moghaddam, A.; Shahryari, S. Demand side management using the internet of energy based on LoRaWAN technology. Kurd. J. Appl. Res. 2017, 2, 112–119. [Google Scholar] [CrossRef]
- Alhamoud, A.; Nair, A.A.; Gottron, C.; Bohnstedt, D.; Steinmetz, R. Presence detection, identification and tracking in smart homes utilizing Bluetooth enabled smartphones. In Proceedings of the 39th IEEE Conference on Local Computer Networks Workshops, Edmonton, AB, Canada, 8–11 September 2014; pp. 784–789. [Google Scholar]
- Ou, C.W.; Chao, C.J.; Chang, F.S.; Wang, S.M.; Liu, G.X.; Wu, M.R.; Cho, K.-Y.; Hwang, L.-T.; Huan, Y.-Y. A ZigBee Position Technique for Indoor Localization Based on Proximity Learning. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 875–880. [Google Scholar]
- Gomez, C.; Oller, J.; Paradells, J. Overview and Evaluation of Bluetooth Low Energy: An Emerging Low-Power Wireless Technology. Sensors 2012, 12, 11734–11735. [Google Scholar] [CrossRef]
- Card, A.S.; Mobile, A. Bluetooth Low Energy (BLE) 101: A Technology Primer with Example Use Cases. June 2014, pp. 1–32. Available online: http://www.smartcardalliance.org/resources/pdf/BLE101-FINAL-053014.pdf (accessed on 16 March 2018).
- Contreras, D.; Castro, M.; De la Torre, D.S. Performance evaluation of Bluetooth low energy in indoor positioning systems. Trans. Emerg. Telecommun. Technol. 2014, 28, e2864. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. An Analysis of the Accuracy of Bluetooth Low Energy for Indoor Positioning Applications. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 201–210. [Google Scholar]
- Zhang, Q.; Karunanithi, M.; Rana, R.; Liu, J. Determination of Activities of Daily Living of independent living older people using environmentally placed sensors. In Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 26 September 2013; pp. 7044–7047. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tag | Advertising Time Interval (ms) |
|---|---|
| 1 | 500 |
| 2 | 1000 |
| 3 | 1500 |
| 4 | 2000 |
| Parameter | p-RSSI Index | m-RSSI Index |
|---|---|---|
| Time step | Topt. = 15 s | Topt. = max(T) = 30 s |
| Advertising interval | TA, opt. = TS = 1 s | TA, opt. = TS = 1 s |
| Tag | E (dBm) | Tag | E (dBm) |
|---|---|---|---|
| 1 | −20 | 4 | 0 |
| 2 | −12 | 5 | +4 |
| 3 | −4 | - | - |
| RSSI Index | Time Step | Advertising Interval | Advertising Power Level |
|---|---|---|---|
| m-RSSI | max(T) | TS | max(E) |
| Time Step | 1 | 3 | 5 | 10 | 15 | 30 |
|---|---|---|---|---|---|---|
| Localization accuracy with Algorithm 1 | 84.89 | 87.67 | 88.61 | 92.22 | 96.67 | 100 |
| Localization accuracy with Algorithm 2 | 87.61 | 90.33 | 91.94 | 93.89 | 96.67 | 100 |
| Time Step | 1 | 3 | 5 | 10 | 15 | 30 |
|---|---|---|---|---|---|---|
| Localization accuracy with Algorithm 1 | 89.39 | 92.5 | 95.56 | 98.89 | 100 | 100 |
| Localization accuracy with Algorithm 2 | 91.28 | 93.83 | 96.67 | 100 | 100 | 100 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mokhtari, G.; Anvari-Moghaddam, A.; Zhang, Q.; Karunanithi, M. Multi-Residential Activity Labelling in Smart Homes with Wearable Tags Using BLE Technology. Sensors 2018, 18, 908. https://doi.org/10.3390/s18030908
Mokhtari G, Anvari-Moghaddam A, Zhang Q, Karunanithi M. Multi-Residential Activity Labelling in Smart Homes with Wearable Tags Using BLE Technology. Sensors. 2018; 18(3):908. https://doi.org/10.3390/s18030908
Chicago/Turabian StyleMokhtari, Ghassem, Amjad Anvari-Moghaddam, Qing Zhang, and Mohanraj Karunanithi. 2018. "Multi-Residential Activity Labelling in Smart Homes with Wearable Tags Using BLE Technology" Sensors 18, no. 3: 908. https://doi.org/10.3390/s18030908
APA StyleMokhtari, G., Anvari-Moghaddam, A., Zhang, Q., & Karunanithi, M. (2018). Multi-Residential Activity Labelling in Smart Homes with Wearable Tags Using BLE Technology. Sensors, 18(3), 908. https://doi.org/10.3390/s18030908