Intrinsic Sensing and Evolving Internal Model Control of Compact Elastic Module for a Lower Extremity Exoskeleton

Abstract
:1. Introduction
- (1)
- Based on the intrinsic sensing properties, a novel compact elastic module is designed to provide the input signal for the controller. Moreover, the compact elastic module is also utilized for the compliant actuation.
- (2)
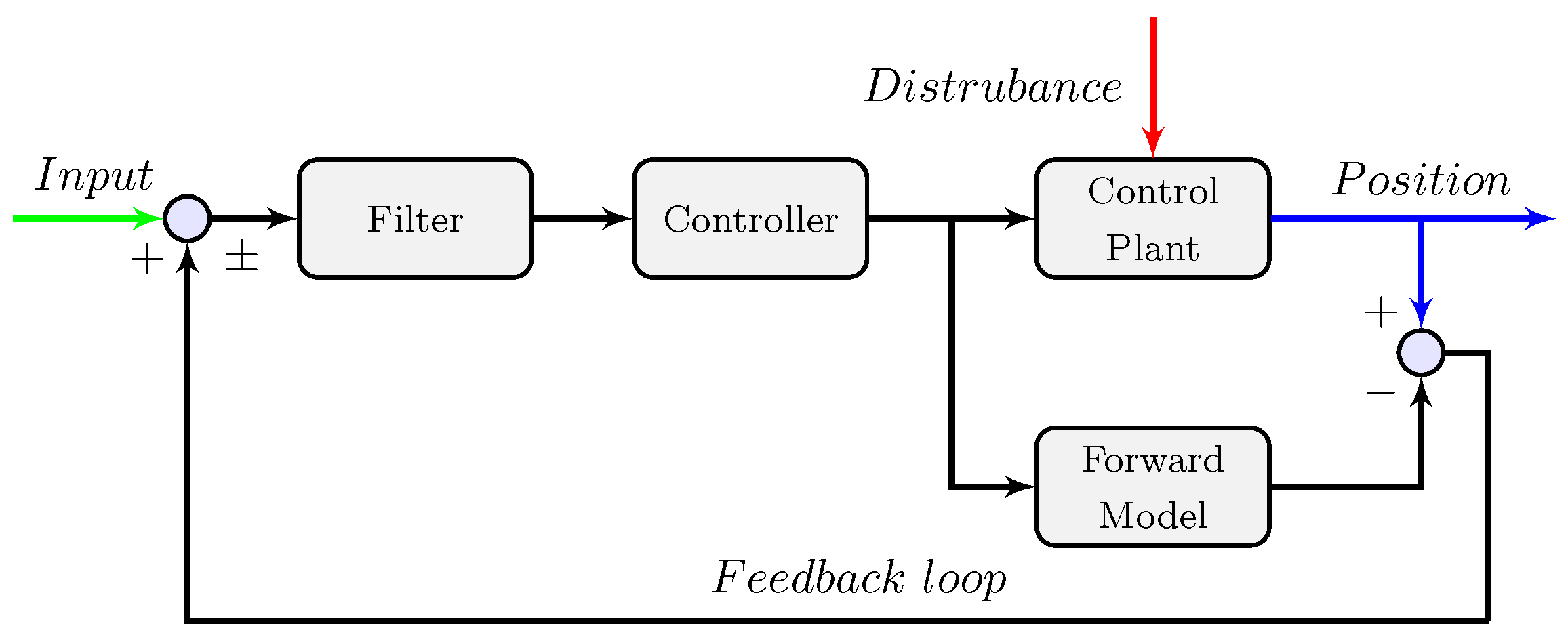
- To improvement the control performance, a novel control scheme—so-called evolving internal model control—is proposed in this paper. The control scheme aims to compensate the system disturbance and model uncertainties by the difference between the exoskeleton control plant and the forward learning model.
- (3)
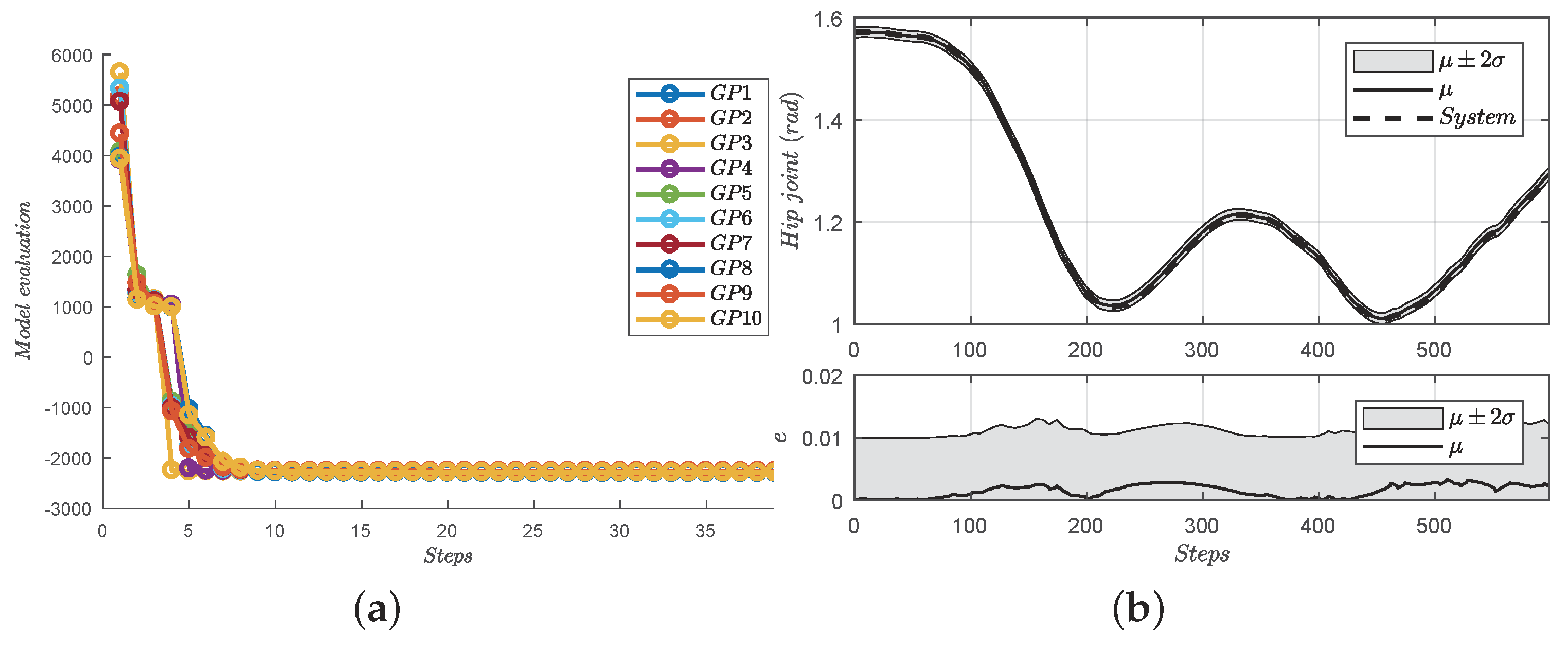
- In order to enhance the system robustness, distributed online model learning is introduced in this paper. Additionally, the main issue of the computation expense is addressed with the distributed learning framework, and the hyper-parameters for each Gaussian process are updated with the Markov Chain Monte Carlo (MCMC) algorithm.
- (4)
- Finally, to demonstrate our control scheme, the model learning procedure as well as the system properties are tested on our exoskeleton robotic system with several experiments.
2. Compact Elastic Module
2.1. From the Biomechanical Inspiration
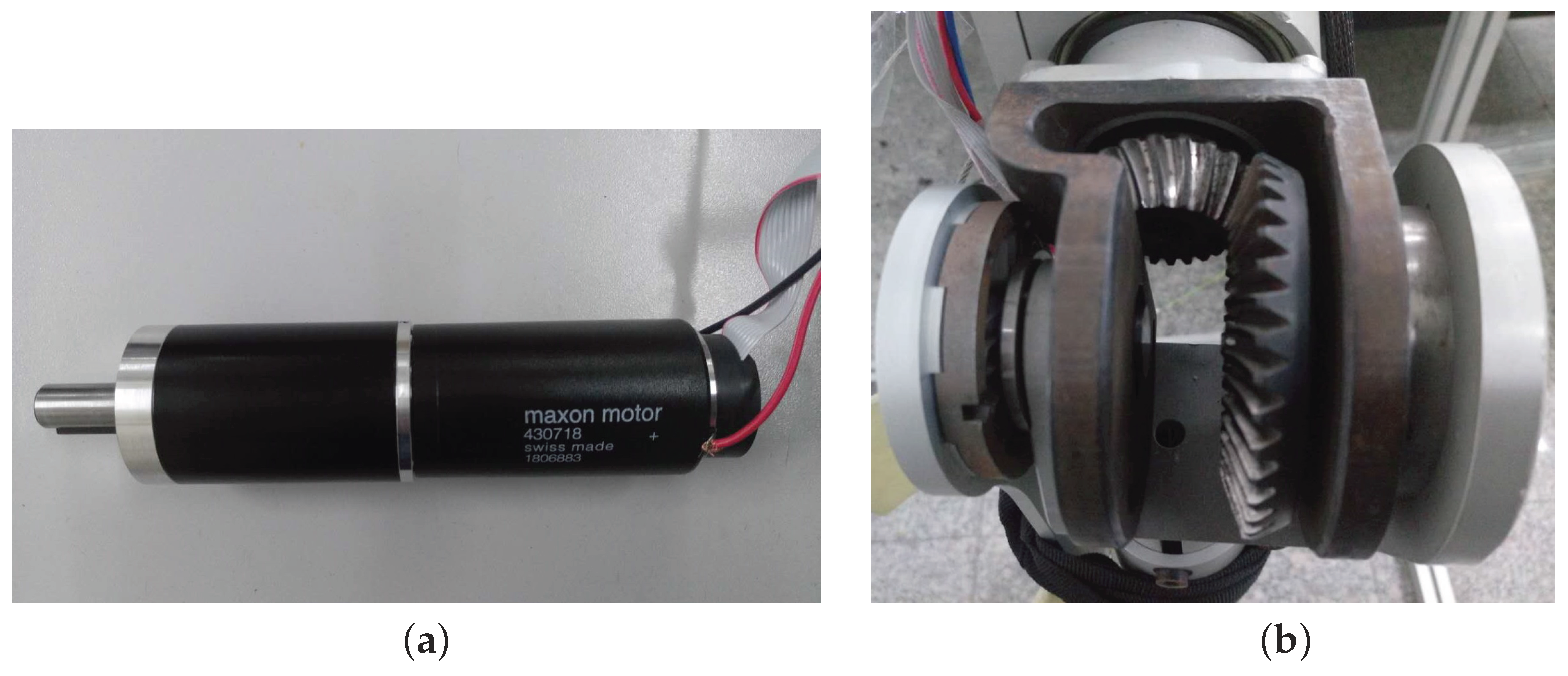
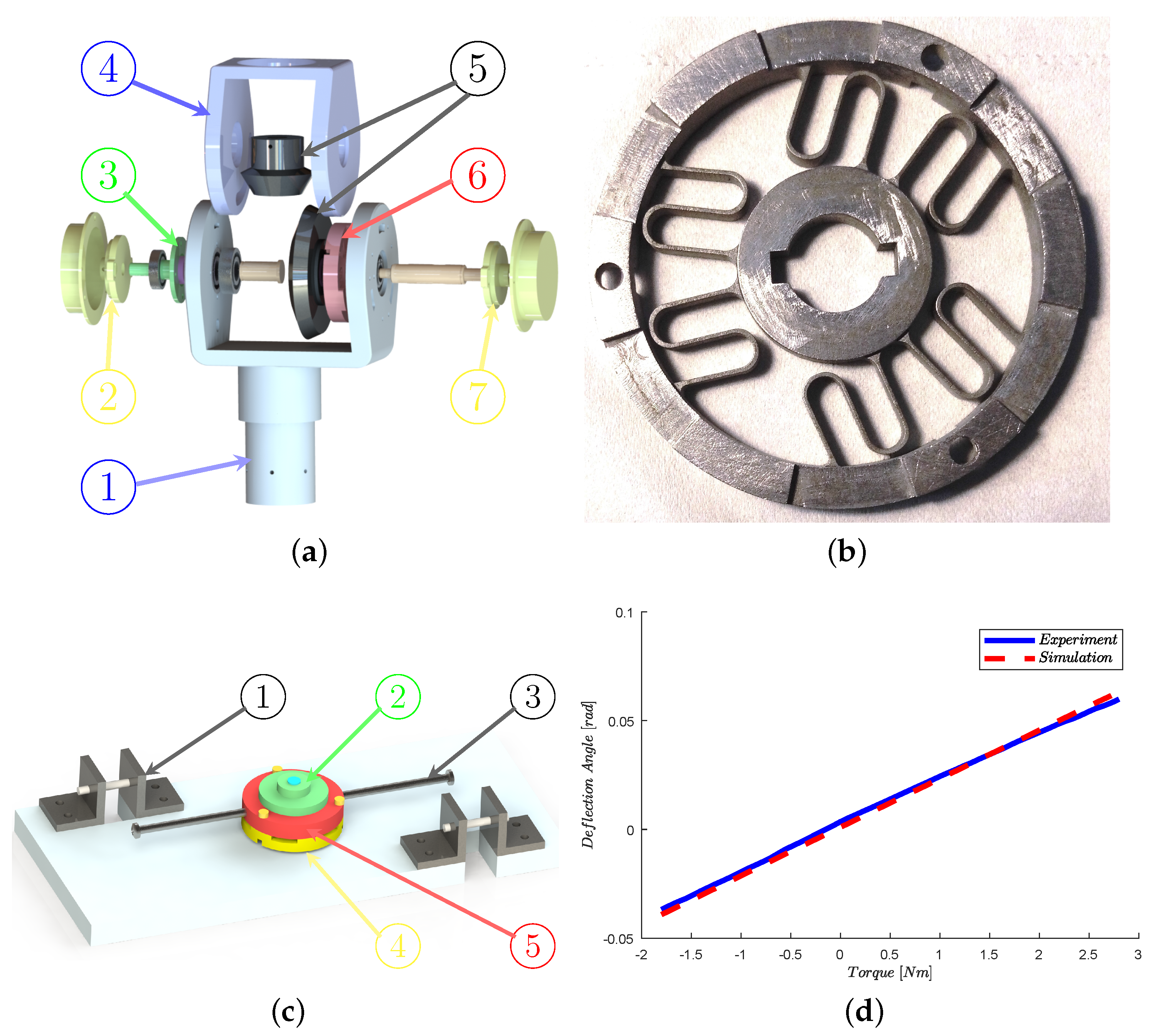
2.2. Designing and Sensing of a Compact Elastic Module
3. Evolving Internal Model Control
3.1. Internal Model Control with Gaussian Process
3.2. Offline Distributed Learning of Forward Model
| Algorithm 1: Calculate Hyper-Parameters Value with Monte Carlo Expectation Maximization |
| input: Training data , , where ; output: Hyper-parameters ;  |
| Algorithm 2: Inference with Markov Chain Monte Carlo |
| input: Training data , , where , Hyper-parameters ; output: The inference Mean and Variance ;  |
3.3. Online Distributed Evolving of Forward Model
| Algorithm 3: Distributed Online Model Evolving |
| input: Observation (), predictive distribution ; output: Updated hyper-parameters ;  |
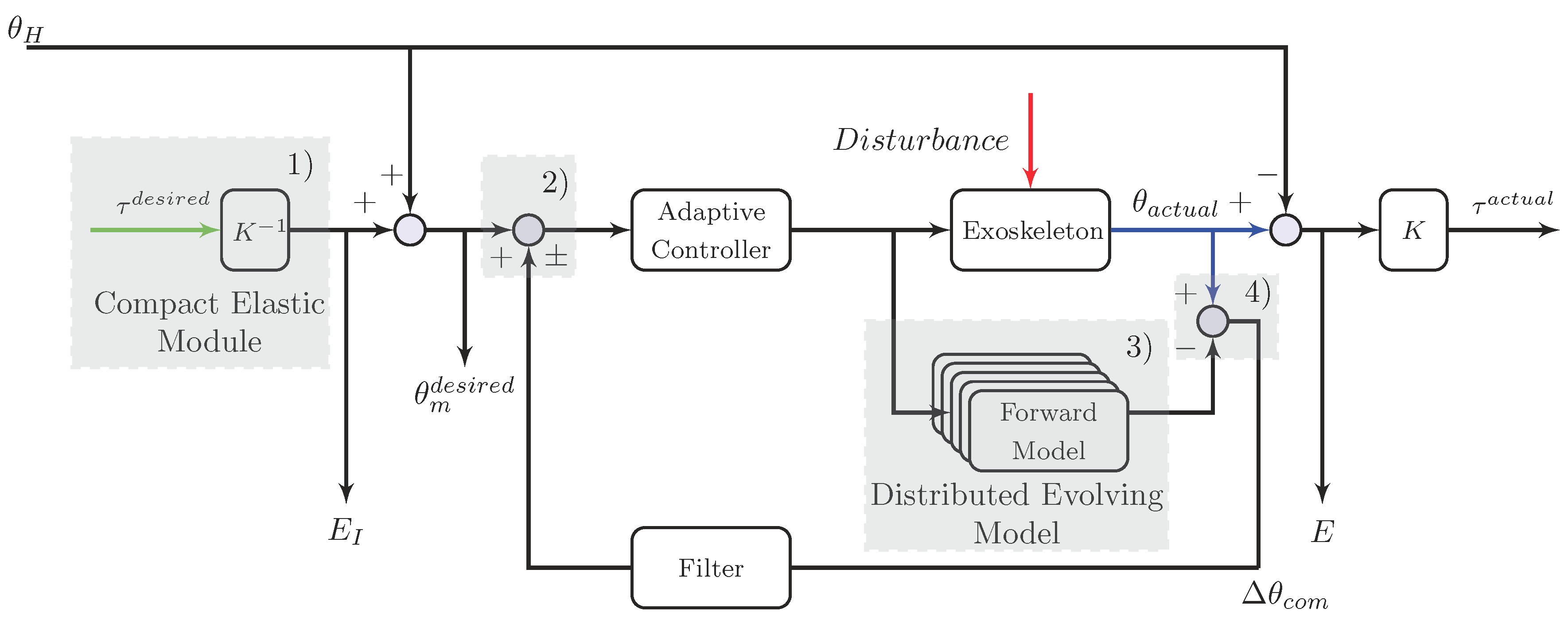
- (1)
- First, the desired position can be obtained from the deflection of the elastic module. If the pilot keeps a steady pose, there is no incremental difference between the motor position and the human joint angle. Therefore, the desired position is zero.
- (2)
- Second, the input to the adaptive controller consists of the desired position as well as the error position compensation from the feedback loop.
- (3)
- Then, the same torque command is sent to the distributed online model and the exoskeleton system with the signal amplification by the driver. Moreover, the M new observation pairs are evaluated with Algorithm 3 and the additional data will be added to the new M subsets if the condition is satisfied.
- (4)
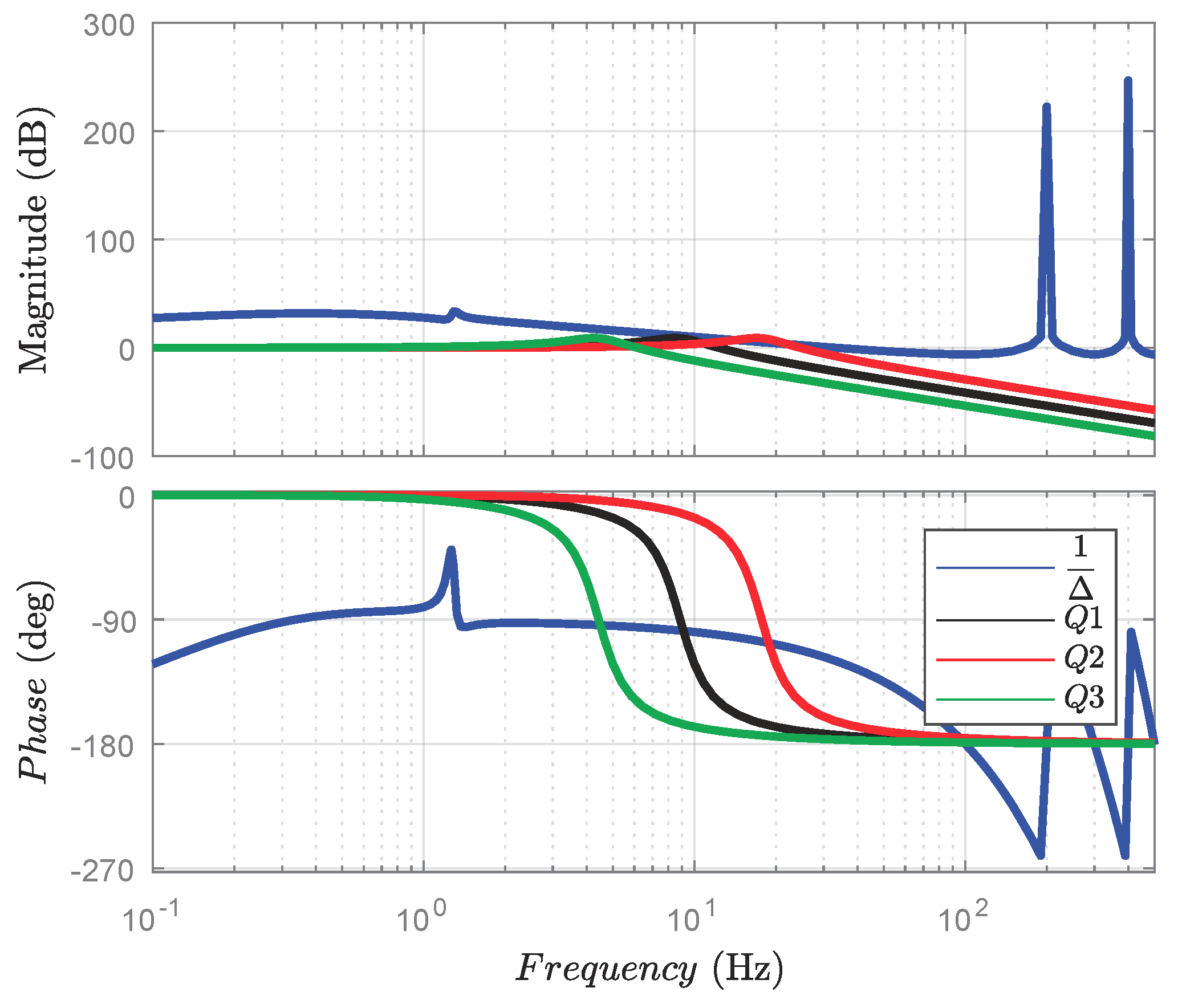
- Finally, based on the internal model control framework, the error position is compensated through the feedback loop. Besides, the low-pass filter is applied to enhance the robustness of the control system.
4. Experiment
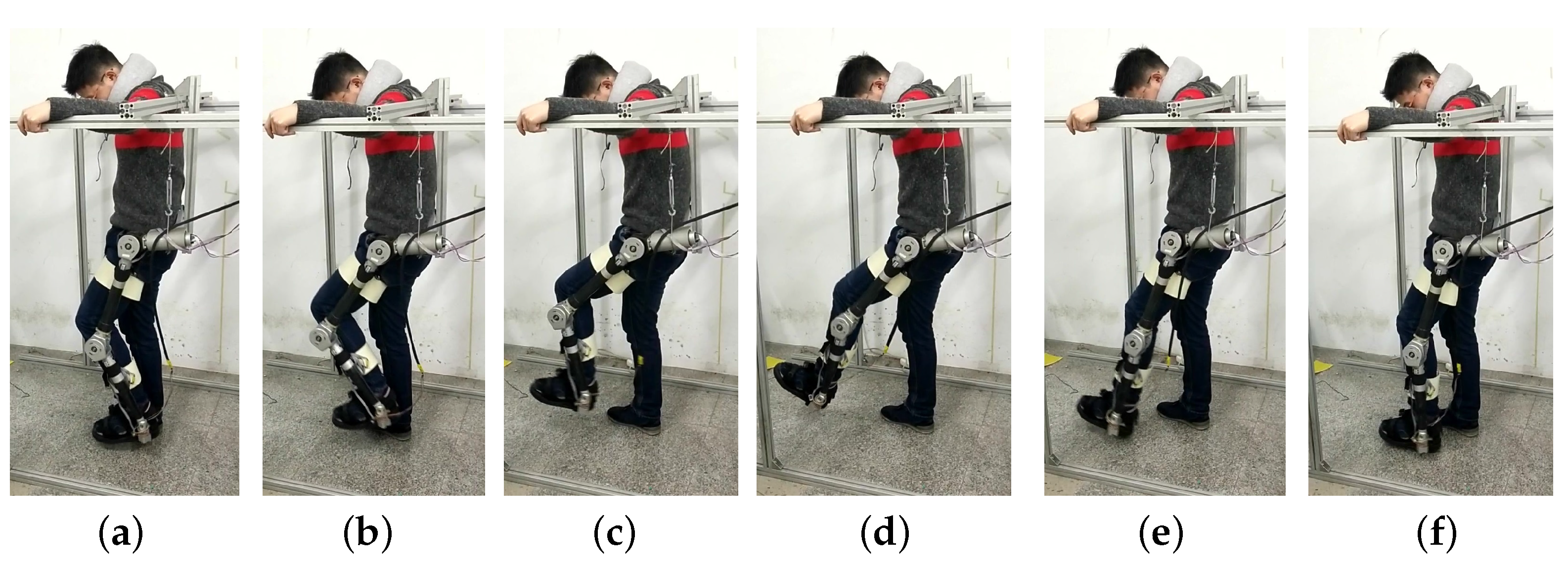
4.1. Hardware Configuration
4.2. Target Tasks
4.2.1. System Properties
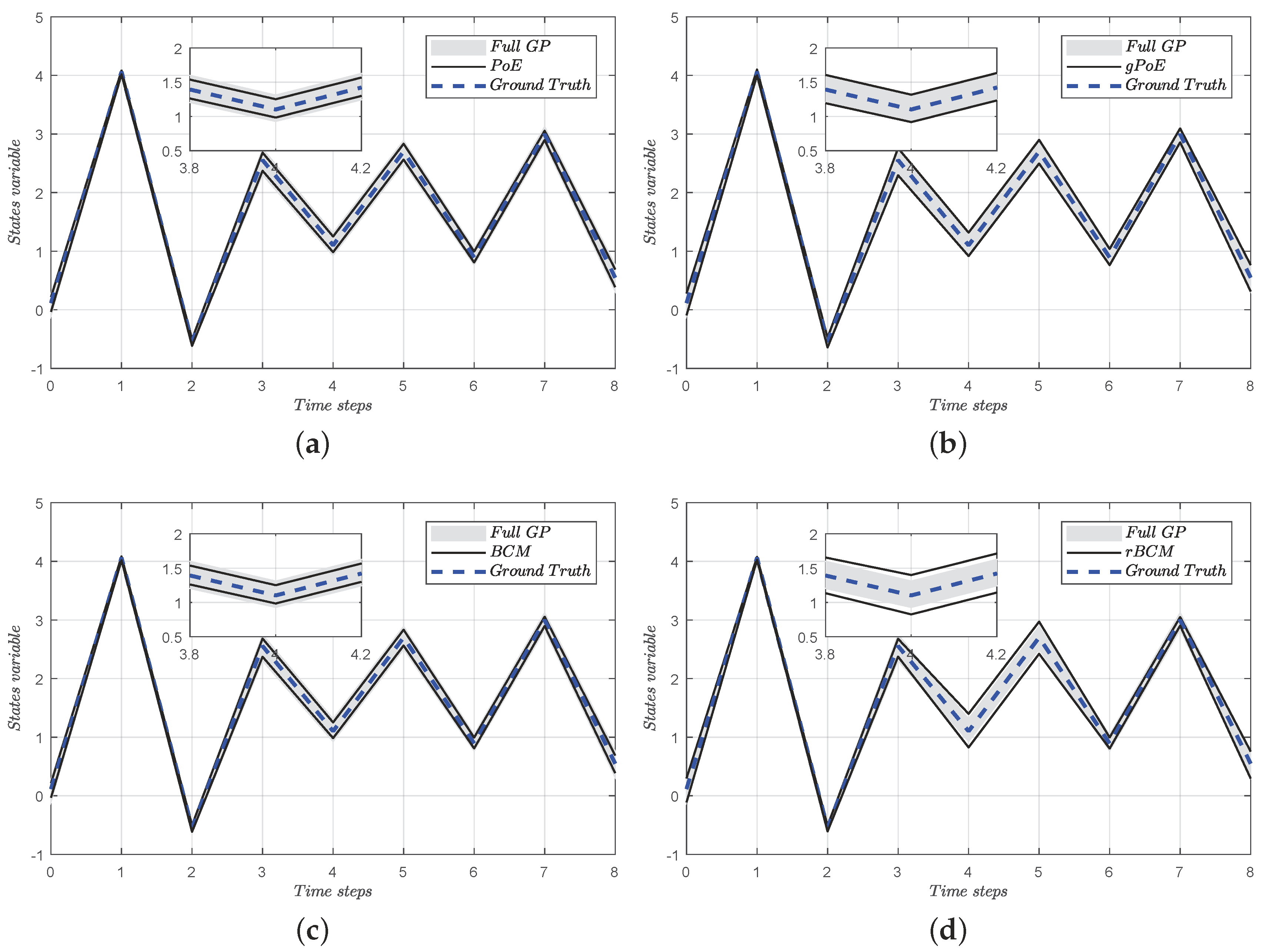
4.2.2. Algorithm Comparison with Human Subject
4.2.3. Experiment with Different Individuals
4.3. Experimental Results and Discussion
4.3.1. System Properties Results
4.3.2. Results of the Algorithm Comparison with Human Subject
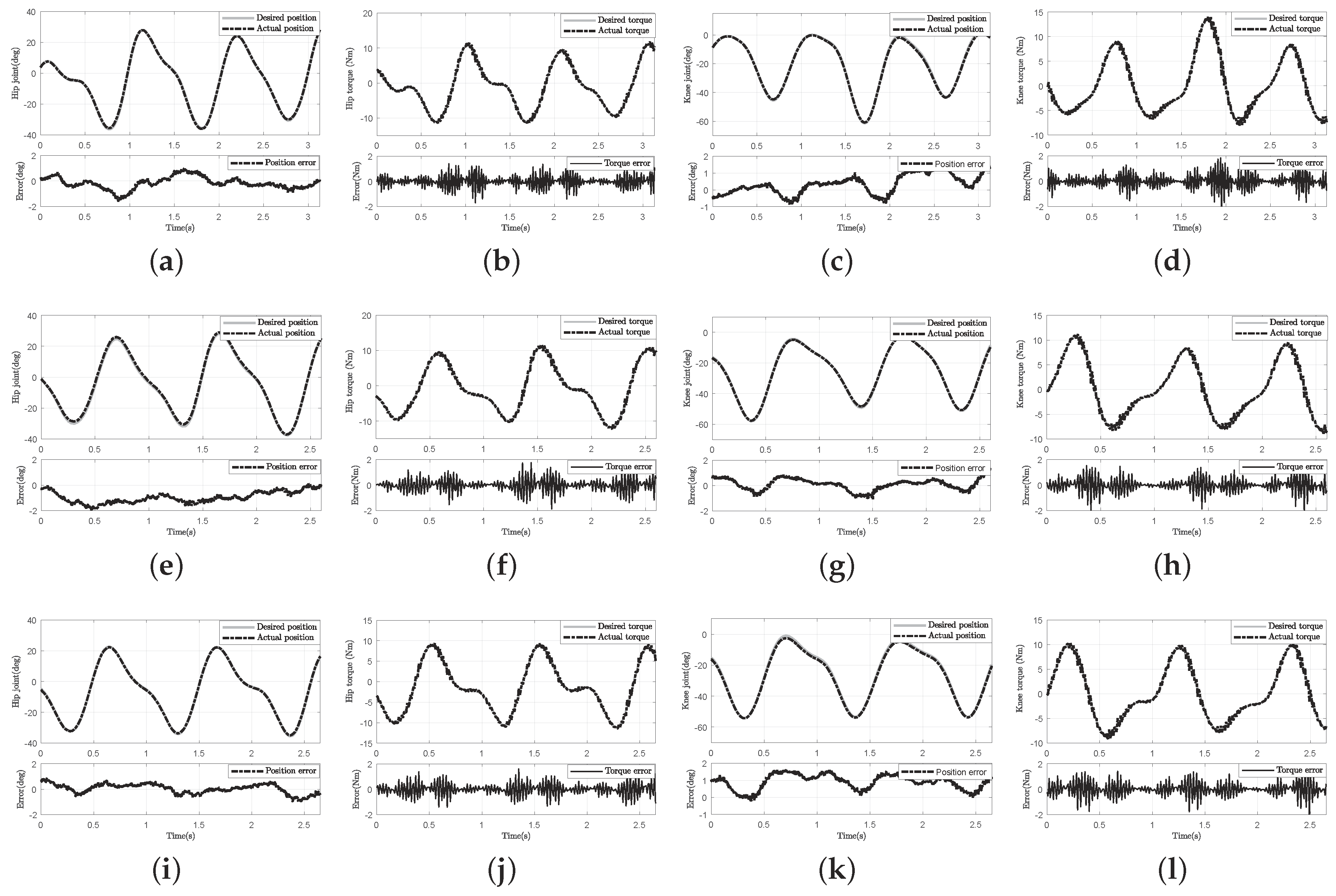
4.3.3. Experimental Results with Different Individuals
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Schabowsky, C.N.; Godfrey, S.B.; Holley, R.J.; Lum, P.S. Development and pilot testing of HEXORR: Hand EXOskeleton rehabilitation robot. J. Neuroeng. Rehabil. 2010, 7, 36. [Google Scholar] [CrossRef] [PubMed]
- Esquenazi, A.; Talaty, M.; Packel, A.; Saulino, M. The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury. Am. J. Phys. Med. Rehabil. 2012, 91, 911–921. [Google Scholar] [CrossRef] [PubMed]
- Kolakowsky-Hayner, S.A.; Crew, J.; Moran, S.; Shah, A. Safety and feasibility of using the Ekso™ bionic exoskeleton to aid ambulation after spinal cord injury. J. Spine 2013, 4, 003. [Google Scholar] [CrossRef]
- Bouzit, M.; Burdea, G.; Popescu, G.; Boian, R. The Rutgers Master II-new design force-feedback glove. IEEE/ASME Trans. Mechatron. 2002, 7, 256–263. [Google Scholar] [CrossRef]
- Nikolakis, G.; Tzovaras, D.; Moustakidis, S.; Strintzis, M.G. Cybergrasp and phantom integration: Enhanced haptic access for visually impaired users. In Proceedings of the 9th Conference Speech and Computer, St. Petersburg, Russia, 20–22 September 2004. [Google Scholar]
- Kazerooni, H. Exoskeletons for human power augmentation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2005), Edmonton, AB, Canada, 2–6 August 2005; pp. 3459–3464. [Google Scholar]
- Cruciger, O.; Schildhauer, T.A.; Meindl, R.C.; Tegenthoff, M.; Schwenkreis, P.; Citak, M.; Aach, M. Impact of locomotion training with a neurologic controlled hybrid assistive limb (HAL) exoskeleton on neuropathic pain and health related quality of life (HRQoL) in chronic SCI: A case study. Disabil. Rehabil. Assist. Technol. 2016, 11, 529–534. [Google Scholar] [CrossRef] [PubMed]
- Kiguchi, K.; Hayashi, Y. An EMG-based control for an upper-limb power-assist exoskeleton robot. IEEE Trans. Syst. Man Cybern. Part B 2012, 42, 1064–1071. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Wang, L.; Meijneke, C.; Van Asseldonk, E.; Hoellinger, T.; Cheron, G.; Ivanenko, Y.; La Scaleia, V.; Sylos-Labini, F.; Molinari, M.; et al. Design and Control of the MINDWALKER Exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 277–286. [Google Scholar] [CrossRef] [PubMed]
- Jimenez-Fabian, R.; Verlinden, O. Review of control algorithms for robotic ankle systems in lower-limb orthoses, prostheses, and exoskeletons. Med. Eng. Phys. 2012, 34, 397–408. [Google Scholar] [CrossRef] [PubMed]
- Bouteraa, Y.; Abdallah, I.B. Exoskeleton robots for upper-limb rehabilitation. In Proceedings of the 13th International Multi-Conference on Systems, Signals & Devices (SSD), Leipzig, Germany, 21–24 March 2016; pp. 1–6. [Google Scholar]
- Tsukahara, A.; Hasegawa, Y.; Sankai, Y. Gait support for complete spinal cord injury patient by synchronized leg-swing with HAL. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1737–1742. [Google Scholar]
- Carignan, C.R.; Cleary, K.R. Closed-loop force control for haptic simulation of virtual environments. Electron. J. Haptics Res. 2000, 1, 2. [Google Scholar]
- Bae, J.; Kong, K.; Tomizuka, M. Gait phase-based control for a rotary series elastic actuator assisting the knee joint. J. Med. Devices 2011, 5, 31010. [Google Scholar] [CrossRef]
- Bae, J.; Tomizuka, M. A gait rehabilitation strategy inspired by an iterative learning algorithm. Mechatronics 2012, 22, 213–221. [Google Scholar] [CrossRef]
- Vallery, H.; Ekkelenkamp, R.; Van Der Kooij, H.; Buss, M. Passive and accurate torque control of series elastic actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2007), San Diego, CA, USA, 29 October–2 November 2007; pp. 3534–3538. [Google Scholar]
- Kong, K.; Bae, J.; Tomizuka, M. Control of rotary series elastic actuator for ideal force-mode actuation in human–robot interaction applications. IEEE/ASME Trans. Mechatron. 2009, 14, 105–118. [Google Scholar] [CrossRef]
- Ugurlu, B.; Nishimura, M.; Hyodo, K.; Kawanishi, M.; Narikiyo, T. Proof of concept for robot-aided upper limb rehabilitation using disturbance observers. IEEE Trans. Hum. Mach. Syst. 2015, 45, 110–118. [Google Scholar] [CrossRef]
- Kim, S.; Bae, J. Force-mode control of rotary series elastic actuators in a lower extremity exoskeleton using model-inverse time delay control (MiTDC). IEEE/ASME Trans. Mechatron. 2017, 22, 1392–1400. [Google Scholar] [CrossRef]
- Calanca, A.; Fiorini, P. Human-adaptive control of series elastic actuators. Robotica 2014, 32, 1301–1316. [Google Scholar] [CrossRef]
- Calanca, A.; Muradore, R.; Fiorini, P. Impedance control of series elastic actuators: Passivity and acceleration-based control. Mechatronics 2017, 47, 37–48. [Google Scholar] [CrossRef]
- Calanca, A.; Fiorini, P. A Rationale for Acceleration Feedback in Force Control of Series Elastic Actuators. IEEE Trans. Robot. 2018, 34, 48–61. [Google Scholar] [CrossRef]
- Veneman, J.; Ekkelenkamp, R.; Kruidhof, R.; Van Der Helm, F.; van der Kooij, H. Design of a series elastic-and Bowden cable-based actuation system for use as torque-actuator in exoskeleton-type training. In Proceedings of the 9th International Conference on Rehabilitation Robotics (ICORR 2005), Chicago, IL, USA, 28 June–1 July 2005; pp. 496–499. [Google Scholar]
- Zinn, M.; Roth, B.; Khatib, O.; Salisbury, J.K. A new actuation approach for human friendly robot design. Int. J. Robot. Res. 2004, 23, 379–398. [Google Scholar] [CrossRef]
- Agarwal, P.; Fox, J.; Yun, Y.; O’Malley, M.K.; Deshpande, A.D. An index finger exoskeleton with series elastic actuation for rehabilitation: Design, control and performance characterization. Int. J. Robot. Res. 2015, 34, 1747–1772. [Google Scholar] [CrossRef]
- Agarwal, P.; Deshpande, A.D. Series Elastic Actuators for Small-Scale Robotic Applications. J. Mech. Robot. 2017, 9, 31016. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.J.; Chen, C.F.; Wang, W.D.; Dong, W. Development of a lower extremity wearable exoskeleton with double compact elastic module: preliminary experiments. Mech. Sci. 2017, 8, 249–258. [Google Scholar] [CrossRef]
- Accoto, D.; Carpino, G.; Sergi, F.; Tagliamonte, N.L.; Zollo, L.; Guglielmelli, E. Design and characterization of a novel high-power series elastic actuator for a lower limb robotic orthosis. Int. J. Adv. Robot. Syst. 2013, 10, 359. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, D.; Makhsous, M.; Lin, F. Stiffness and viscous damping of the human leg. In Proceedings of the 24th Annual Meeting of the American Society of Biomechanics, Chicago, IL, USA, 19–22 July 2000. [Google Scholar]
- Kirtley, C. CGA Normative Gait Database. 2006. Available online: http://guardian.curtin.edu.au/cga/data/ (accessed on 7 March 2018).
- Winter, A. Biomechanical Data Resources, Gait Data. International Society of Biomechanics. 2006. Available online: https://isbweb.org/data/ (accessed on 7 March 2018).
- Motor Maxon. Maxon Motor Company, 2015. Available online: https://www.maxonmotor.com (accessed on 7 March 2018).
- Kong, K.; Bae, J.; Tomizuka, M. A compact rotary series elastic actuator for human assistive systems. IEEE/ASME Trans. Mechatron. 2012, 17, 288–297. [Google Scholar] [CrossRef]
- Garcia, C.E.; Morari, M. Internal model control. A unifying review and some new results. Ind. Eng. Chem. Process Des. Dev. 1982, 21, 308–323. [Google Scholar] [CrossRef]
- Rivera, D.E.; Morari, M.; Skogestad, S. Internal model control: PID controller design. Ind. Eng. Chem. Process Des. Dev. 1986, 25, 252–265. [Google Scholar] [CrossRef]
- Rivals, I.; Personnaz, L. Nonlinear internal model control using neural networks: Application to processes with delay and design issues. IEEE Trans. Neural Netw. 2000, 11, 80–90. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Gu, H. Fuzzy Adaptive Internal Model Control Schemes for PMSM Speed-Regulation System. IEEE Trans. Ind. Inform. 2012, 8, 767–779. [Google Scholar] [CrossRef]
- Gregorcic, G.; Lightbody, G. Internal model control based on a Gaussian process prior model. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4981–4986. [Google Scholar]
- Luttinen, J.; Ilin, A. Efficient Gaussian process inference for short-scale spatio-temporal modeling. In Proceedings of the Fifteenth International Conference on Artificial Intelligence and Statistics, La Palma, Spain, 21–23 April 2012; pp. 741–750. [Google Scholar]
- Long, Y.; Du, Z.j.; Dong, W.; Wang, W.d. Human Gait Trajectory Learning Using Online Gaussian Process for Assistive Lower Limb Exoskeleton. In Wearable Sensors and Robots; Springer: Singapore, 2017; pp. 165–179. [Google Scholar]
- Deisenroth, M.P.; Ng, J.W. Distributed gaussian processes. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015. [Google Scholar]
- Rasmussen, C.E.; Williams, C.K. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; Volume 1. [Google Scholar]
- Blum, M. Gaussian Process Library for Machine Learning. 11th November 2012 version 0.1.4. Available online: https://github.com/mblum/libgp (accessed on 7 March 2018).
- Ng, J.W.; Deisenroth, M.P. Hierarchical mixture-of-experts model for large-scale Gaussian process regression. arXiv, 2014; arXiv:1412.3078. [Google Scholar]
- Cao, Y.; Fleet, D.J. Generalized product of experts for automatic and principled fusion of Gaussian process predictions. arXiv, 2014; arXiv:1410.7827. [Google Scholar]
- Tresp, V. A Bayesian committee machine. Neural Comput. 2000, 12, 2719–2741. [Google Scholar] [CrossRef] [PubMed]
- Kitagawa, G. Monte Carlo filter and smoother for non-Gaussian nonlinear state space models. J. Comput. Graph. Stat. 1996, 5, 1–25. [Google Scholar]
- Cui, Y.; Matsubara, T.; Sugimoto, K. Pneumatic artificial muscle-driven robot control using local update reinforcement learning. Adv. Robot. 2017, 31, 397–412. [Google Scholar] [CrossRef]
- Muelling, K.; Boularias, A.; Mohler, B.; Peters, J. Learning strategies in table tennis using inverse reinforcement learning. Biol. Cybern. 2014, 108, 603–619. [Google Scholar] [CrossRef] [PubMed]
- Petelin, D.; Kocijan, J. Control system with evolving Gaussian process models. In Proceedings of the IEEE Workshop on Evolving and Adaptive Intelligent Systems (EAIS), Paris, France, 11–15 April 2011; pp. 178–184. [Google Scholar]
- Snelson, E.; Ghahramani, Z. Sparse Gaussian processes using pseudo-inputs. In Proceedings of the 18th International Conference on Neural Information Processing Systems, Vancouver, BC, Canada, 5–8 December 2005; pp. 1257–1264. [Google Scholar]
- Chen, W.H. Disturbance observer based control for nonlinear systems. IEEE/ASME Trans. Mechatron. 2004, 9, 706–710. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.H.; Ballance, D.J.; Gawthrop, P.J.; O’Reilly, J. A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 2000, 47, 932–938. [Google Scholar] [CrossRef] [Green Version]
- Winter, D.A. Biomechanics and Motor Control of Human Movement; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joints | DoF | Scope |
|---|---|---|
| Hip | Flexion/extension | – |
| Adduction/abduction | – | |
| Medial/lateral rotation | – | |
| Knee | Flexion/extention | – |
| Ankle | Plantarflexion/dorsiflextion | – |
| Pronation/external rotation | – | |
| Inversion/eversion | – |
| Parameters | Values |
|---|---|
| stiffness | 60.2 Nm/rad |
| diameter of outer circle | 60 mm |
| diameter of inner circle | 8 mm |
| maximum torsion torque | 4 Nm |
| thickness | 5 mm |
| maximum deflection | 0.087 rad |
| resolution | 0.1 Nm |
| Methods | Full GP | PoE | gPoE | BCM | rBCM |
|---|---|---|---|---|---|
| NLL |
| Methods | GP [42] | Sparse GP [51] | Distributed GP [41] | Proposed Method |
|---|---|---|---|---|
| Training | or | |||
| prediction |
| Subject | Gender | Age (Years) | Mass (kg) | Height (m) | Status |
|---|---|---|---|---|---|
| A | M | 25 | 80 | 1.83 | Healthy |
| B | M | 28 | 90 | 1.75 | Healthy |
| C | M | 25 | 70 | 1.80 | Healthy |
| D | M | 26 | 90 | 1.80 | Healthy |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Du, Z.; Dong, W.; Shen, Y.; Zhao, G. Intrinsic Sensing and Evolving Internal Model Control of Compact Elastic Module for a Lower Extremity Exoskeleton. Sensors 2018, 18, 909. https://doi.org/10.3390/s18030909
Wang L, Du Z, Dong W, Shen Y, Zhao G. Intrinsic Sensing and Evolving Internal Model Control of Compact Elastic Module for a Lower Extremity Exoskeleton. Sensors. 2018; 18(3):909. https://doi.org/10.3390/s18030909
Chicago/Turabian StyleWang, Likun, Zhijiang Du, Wei Dong, Yi Shen, and Guangyu Zhao. 2018. "Intrinsic Sensing and Evolving Internal Model Control of Compact Elastic Module for a Lower Extremity Exoskeleton" Sensors 18, no. 3: 909. https://doi.org/10.3390/s18030909
APA StyleWang, L., Du, Z., Dong, W., Shen, Y., & Zhao, G. (2018). Intrinsic Sensing and Evolving Internal Model Control of Compact Elastic Module for a Lower Extremity Exoskeleton. Sensors, 18(3), 909. https://doi.org/10.3390/s18030909