Evaluating Muscle Activation Models for Elbow Motion Estimation



Abstract
:1. Introduction
2. Existing Muscle Activation Models
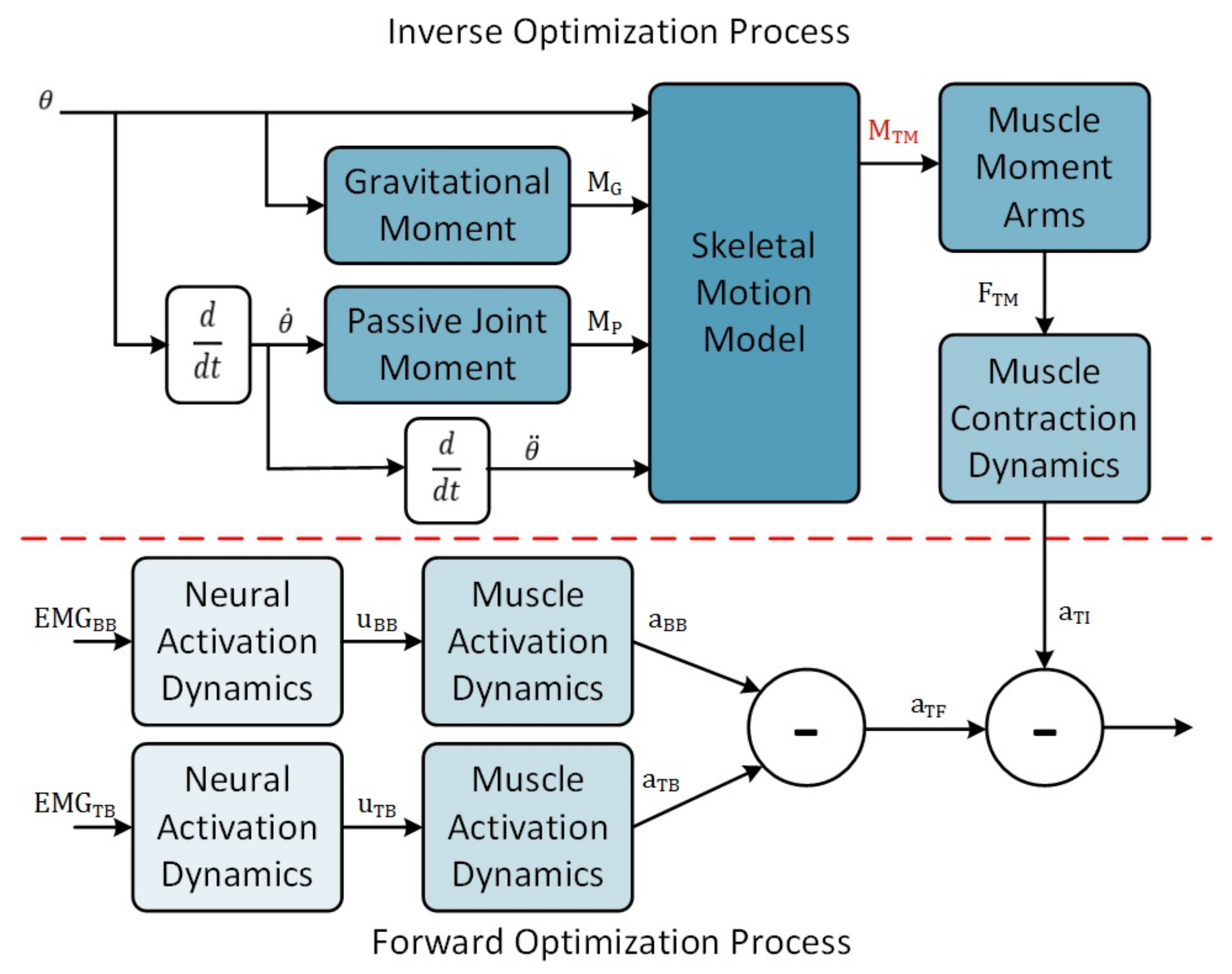
3. Methods
3.1. EMG Processing and Neural Activation Model
3.2. Muscle Activation Models
3.3. Muscle Contraction Model
3.4. Skeletal Motion Model
3.5. Performance Metrics
4. Experimental Evaluation
4.1. Data Collection and Processing
4.2. Optimization Procedure
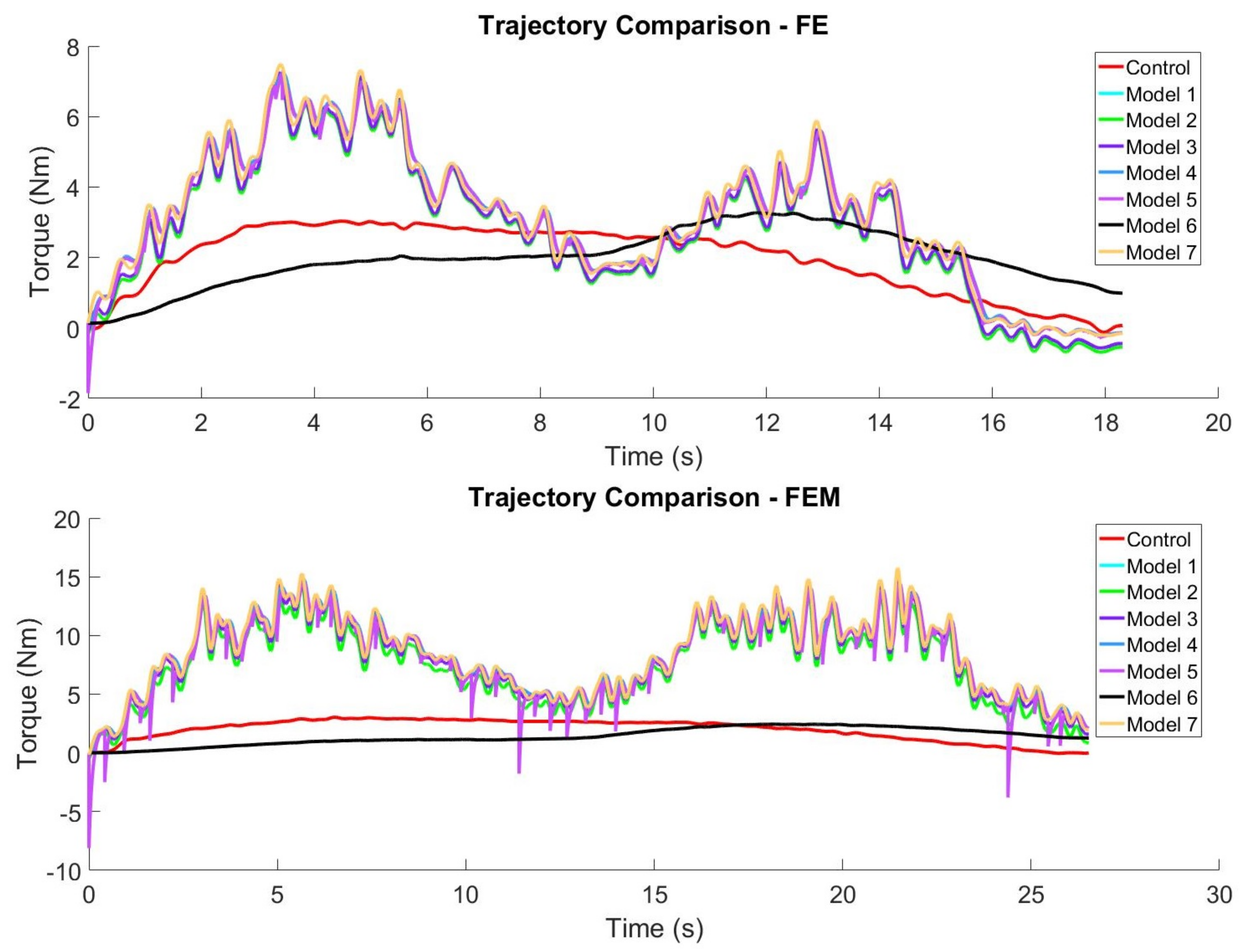
5. Results
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Vitiello, N.; Lenzi, T.; Roccella, S.; Rossi, S.D.; Cattin, E.; Giovacchini, F.; Vecch, F.; Carrozza, M. NEUROExos: A Powered Elbow Exoskeleton for Physical Rehabilitation. IEEE Trans. Robot. 2013, 29, 220–235. [Google Scholar] [CrossRef]
- Lobo-Prat, J.; Kooren, P.N.; Janssen, M.M.H.P.; Keemink, A.Q.L.; Veltink, P.H.; Stienen, A.H.A.; Koopman, B.F.J.M. Implementation of EMG- and Force-Based Control Interfaces in Active Elbow Supports for Men With Duchenne Muscular Dystrophy: A Feasibility Study. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1179–1190. [Google Scholar] [CrossRef] [PubMed]
- Moody, C.B.; Barhorst, A.A.; Schovanec, L. A Neuro-Muscular Elasto-Dynamic Model of the Human Arm Part 2: Musculotendon Dynamics and Related Stress Effects. J. Bionic Eng. 2009, 6, 108–119. [Google Scholar] [CrossRef]
- Katsiaris, P.T.; Artemiadis, P.K.; Kyriakopoulos, K.J. Modeling anthropomorphism in dynamic human arm movements. In Proceedings of the IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3507–3512. [Google Scholar]
- Abdullah, H.A.; Tarry, C.; Mittal, G.S.; Abderrahim, M. A biomechanical model to aid robot-assisted therapy of upper limb impairment. In Proceedings of the Annual Conference on IEEE Industrial Electronics, Paris, France, 7–10 November 2006; pp. 4107–4112. [Google Scholar]
- Bayati, H.; Vahdat, S.; Vahdat, B.V. Investigating the properties of optimal sensory and motor synergies in a nonlinear model of arm dynamics. In Proceedings of the International Joint Conference on Neural Networks, Atlanta, GA, USA, 14–19 June 2009; pp. 2524–2531. [Google Scholar]
- Clancy, E.A.; Liu, L.; Liu, P.; Moyer, D.V.Z. Identification of constant-posture EMG-torque relationship about the elbow using nonlinear dynamic models. IEEE Trans. Biomed. Eng. 2012, 59, 205–212. [Google Scholar] [CrossRef] [PubMed]
- Kiguchi, K.; Hayashi, Y. Motion estimation based on EMG and EEG signals to control wearable robots. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Washington, DC, USA, 13–16 October 2013; pp. 4213–4218. [Google Scholar]
- Chadwick, E.; Blana, D.; Kirsch, R.F.; van den Bogert, A.J. Real-time simulation of three-dimensional shoulder girdle and arm dynamics. IEEE Trans. Biomed. Eng. 2014, 61, 1947–1956. [Google Scholar] [CrossRef] [PubMed]
- Song, R.; Tong, K. Using recurrent artificial neural network model to estimate voluntary elbow torque in dynamic situations. Med. Biol. Eng. Comput. 2005, 43, 473–480. [Google Scholar] [CrossRef] [PubMed]
- Buchanan, T.S.; Lloyd, D.G.; Manal, K.; Besier, T.F. Neuromusculoskeletal modeling: Estimation of muscle forces and joint moments and movements from measurements of neural command. J. Appl. Biomech. 2004, 20, 367–395. [Google Scholar] [CrossRef] [PubMed]
- Ruiz, A.L.C.; Pontonnier, C.; Levy, J.; Dumont, G. Motion control via muscle synergies. In Proceedings of the ACM SIGGRAPH Conference on Motion in Games, Paris, France, 16–18 November 2015; pp. 65–72. [Google Scholar]
- Manal, K.; Buchanan, T.S. A one-parameter neural activation to muscle activation model: Estimating isometric joint moments from electromyograms. J. Biomech. 2003, 36, 1197–1202. [Google Scholar] [CrossRef]
- Cavallaro, E.E.; Rosen, J.; Perry, J.C.; Burns, S. Real-time myoprocessors for a neural controlled powered exoskeleton arm. IEEE Trans. Biomed. Eng. 2006, 53, 2387–2396. [Google Scholar] [CrossRef] [PubMed]
- Bai, J.; Gao, Y.; Wang, S.; Zhao, J. An Elbow Biomechanical Model and Its Coefficients Adjustment. In Proceedings of the IEEE International Conference on Software Engineering and Service Science, Ramat Gan, Israel, 11–12 June 2014; pp. 954–957. [Google Scholar]
- Gao, Y.; Bai, J.; Wang, S.; Zhao, J. An elbow-biomechanical modeling based on sEMG. In Proceedings of the World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 5238–5243. [Google Scholar]
- Manal, K.; Gonzalez, R.V.; Lloyd, D.G.; Buchanan, T.S. A real-time EMG-driven virtual arm. Comput. Biol. Med. 2002, 32, 25–36. [Google Scholar] [CrossRef]
- Rengifo, C.; Aoustin, Y.; Plestan, F.; Chevallereau, C. Distribution of forces between synergistics and antagonistics muscles using an optimization criterion depending on muscle contraction behavior. ASME J. Biomech. Eng. 2010, 132, 11. [Google Scholar] [CrossRef] [PubMed]
- Chadwick, E.K.; Blana, D.; van den Bogert, A.J.; Kirsch, R.F. A real-time, 3-D musculoskeletal model for dynamic simulation of arm movements. IEEE Trans. Biomed. Eng. 2009, 56, 941–948. [Google Scholar] [CrossRef] [PubMed]
- Thelen, D.G. Adjustment of muscle mechanics model parameters to simulate dynamic contractions in older adults. J. Biomech. Eng. 2003, 125, 70–77. [Google Scholar] [CrossRef] [PubMed]
- Desplenter, T.; Kyrylova, A.; Trejos, A.L. Development of an EMG-driven control system for a wearable mechatronic elbow brace. In Proceedings of the IEEE International Conference on Biomedical and Health Informatics, Las Vegas, NV, USA, 24–27 February 2016; pp. 501–504. [Google Scholar]
- Heckathorne, C.W.; Childress, D.S. Relationships of the surface electromyogram to the force, length, velocity, and contraction rate of the cineplastic human biceps. Am. J. Phys. Med. 1981, 60, 1–19. [Google Scholar] [PubMed]
- Woods, J.; Bigland-Ritchie, B. Linear and non-linear surface emg/force relationships in human muscles. Am. J. Phys. Med. 1983, 62, 287–299. [Google Scholar] [PubMed]
- Winters, J.M. An improved muscle-reflex actuator for use in large-scale neuromusculoskeletal models. Ann. Biomed. Eng. 1995, 23, 359–374. [Google Scholar] [CrossRef] [PubMed]
- Downey, R.J.; Merad, M.; Gonzalez, E.J.; Dixon, W.E. The Time-Varying Nature of Electromechanical Delay and Muscle Control Effectiveness in Response to Stimulation-Induced Fatigue. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1397–1408. [Google Scholar] [CrossRef] [PubMed]
- Ison, M.; Artemiadis, P. Proportional Myoelectric Control of Robots: Muscle Synergy Development Drives Performance Enhancement, Retainment, and Generalization. IEEE Trans. Robot. 2015, 31, 259–268. [Google Scholar] [CrossRef]
- Ison, M.; Vujaklija, I.; Whitsell, B.; Farina, D.; Artemiadis, P. High-Density Electromyography and Motor Skill Learning for Robust Long-Term Control of a 7-DoF Robot Arm. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 424–433. [Google Scholar] [CrossRef] [PubMed]
- Kooren, P.N.; Lobo-prat, J.; Keemink, A.Q.L.; Janssen, M.M.; Stienen, A.H.A.; Groot, I.J.M.D.; Paalman, M.I.; Verdaasdonk, R.; Koopman, B.F.J.M. Design and control of the Active A-Gear: A wearable 5 DOF arm exoskeleton for adults with duchenne muscular dystrophy. In Proceedings of the IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, Singapore, 26–29 June 2016; pp. 1242–1247. [Google Scholar]
- Tang, Z.; Zhang, K.; Sun, S.; Gao, Z.; Zhang, L.; Yang, Z. An upper-limb power-assist exoskeleton using proportional myoelectric control. Sensors 2014, 14, 6677–6694. [Google Scholar] [CrossRef] [PubMed]
- Lloyd, D.G.; Besier, T.F. An EMG-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo. J. Biomech. 2003, 36, 765–776. [Google Scholar] [CrossRef]
- Millard, M.; Uchida, T.; Seth, A.; Delp, S.L. Flexing Computational Muscle: Modeling and Simulation of Musculotendon Dynamics. J. Biomech. Eng. 2013, 135, 021005. [Google Scholar] [CrossRef] [PubMed]
- National Center for Simulation in Rehabilitation Research. Available online: http://opensim.stanford.edu/ (accessed on 23 March 2018).
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 2nd ed.; Wiley: Hoboken, NJ, USA, 1990; pp. 52–57. [Google Scholar]
- Nagarsheth, H.J.; Savsani, P.V.; Patel, M.A. Modeling and dynamics of human arm. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Arlington, VA, USA, 23–26 August 2008; pp. 924–928. [Google Scholar]
- Baiqing, S.; Yanjun, L. Dynamics modeling of human elbow joints servicing for rehabilitation robots. In Proceedings of the IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 27–29 May 2009; pp. 2566–2569. [Google Scholar]
- Ding, Q.C.; Xiong, A.B.; Zhao, X.G.; Han, J.D. A novel EMG-driven state space model for the estimation of continuous joint movements. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Anchorage, AK, USA, 9–12 October 2011; pp. 2891–2897. [Google Scholar]
- Peng, L.; Hou, Z.G.; Wang, W. A dynamic EMG-torque model of elbow based on neural networks. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Milan, Italy, 25–29 August 2015; pp. 2852–2855. [Google Scholar]
- Winters, J.M.; Stark, L. Analysis of Fundamental Human Movement Patterns through the Use of In-Depth Antagonistic Muscle Models. IEEE Trans. Biomed. Eng. 1985, BME-32, 826–839. [Google Scholar] [CrossRef] [PubMed]
- Stroeve, S. Impedance characteristics of a neuromusculoskeletal model of the human arm I. Posture control. Biol. Cybern. 1999, 81, 475–494. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model ID | First Author [Reference] | Model Equations * |
|---|---|---|
| Model 1 | Manal [17] | |
| Model 2 | Cavallaro [14] | |
| Model 3 | Manal [13] | |
| Model 4 | Chadwick [9] | |
| Model 5 | Rengifo [18] | |
| Model 6 | Chadwick [19] | |
| Model 7 | Thelen [20] |
| Parameter Symbol | Parameter Source | Parameter Values (Units) | |
|---|---|---|---|
| EMG Processing and Neural Activation Model | |||
| Analysis, [2,27] | 3 Hz | ||
| Muscle Contraction Model | |||
| Biceps Brachii (Long Head) | Triceps Brachii (Long Head) | ||
| OpenSim | 2874.67 N | 2397.12 N | |
| OpenSim | 0.1106–0.1361 m | 0.1236–0.1681 m | |
| OpenSim | 0 rad | 0.2094 rad | |
| W | [9] | 0.56 | 0.56 |
| [9] | 1.106–1.361 m/s | 1.236–1.681 m/s | |
| A | [9] | 0.25 | 0.25 |
| [9] | 1.5 | 1.5 | |
| [9,19] | 0.1659–0.2042 m | 0.1854–0.2522 m | |
| Skeletal Motion Model | |||
| b | [9] | 1 Nms/rad | |
| Name | Description | Equation |
|---|---|---|
| Total muscle activation error | The root-mean square of the squared difference between the forward-derived total muscle activation () and the inversely-derived total muscle activation (). is the number of samples. | |
| Total muscle torque error | The root-mean square of the absolute difference between the estimated total muscle activation () and the optimized total muscle activation (). is the number of samples. | |
| Processor usage percentage | The ratio of the time spent executing a program () to the total available processing time () expressed as a percentage. In multi-core processors, the summation of the percentage used by each processing core (i) is taken. is the number of processing cores. | |
| Program space | The summation of the number of bytes () per instruction (k) and bytes () per data value (j) of computer memory that a program requires to execute its behaviour. I and D are the total number of instructions and data values, respectively. | |
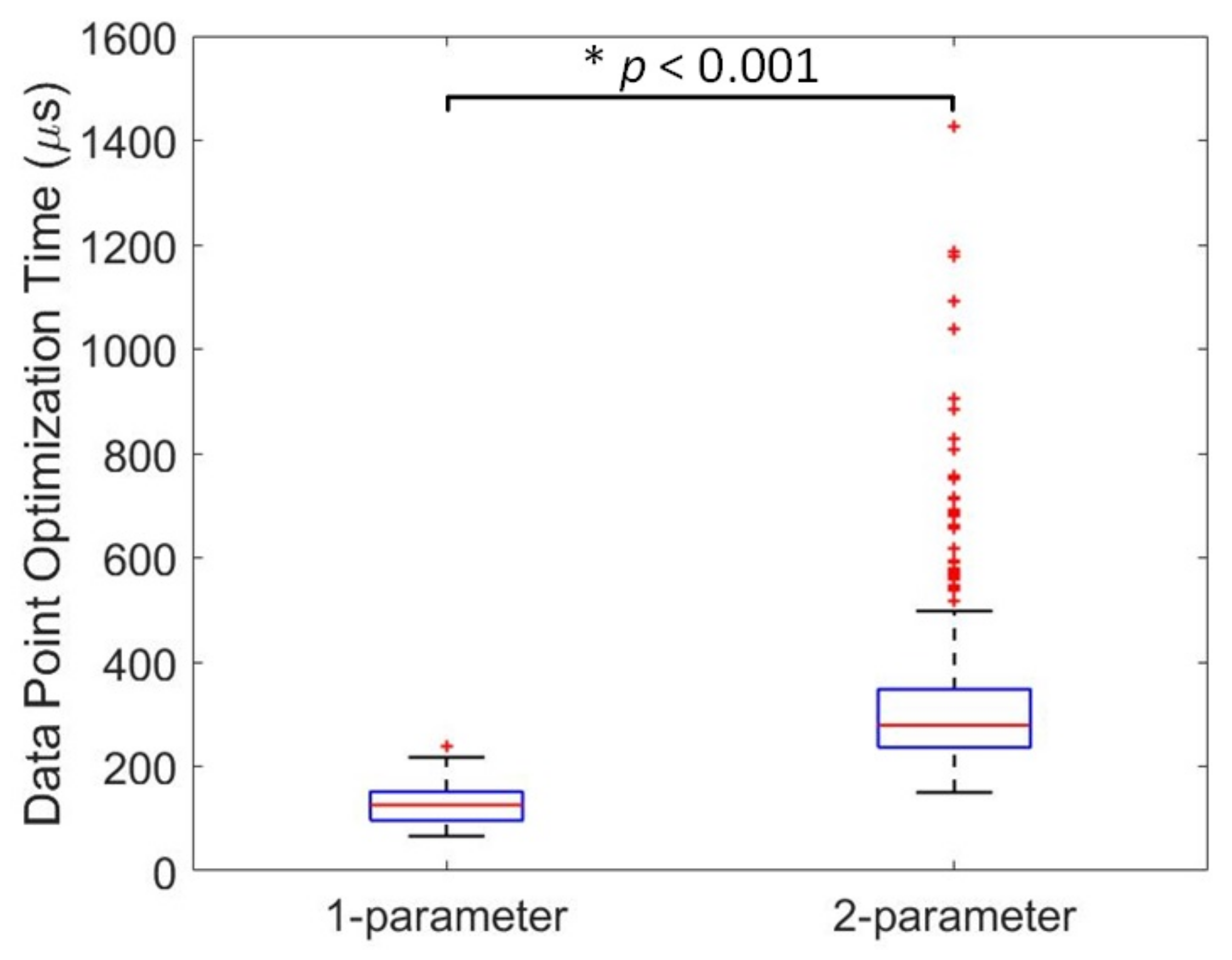
| Data point optimization time | The total amount of time required to performance the optimization task () divided by the number of data points (). This metric allows for comparison given different dataset lengths. |
| Motion (Motion ID) | Motion Description |
|---|---|
| Elbow flexion-extension (FE) | From full elbow extension, the subject flexes to 120, pauses and then extends until reaching full elbow extension. |
| Elbow extension-flexion (EF120) | Beginning at 120 flexion, the subject extends the elbow until reaching full extension, pauses and then flexes the elbow back to 120. |
| Elbow flexion-extension while holding a mass (FEM) | With a 1-kg mass held in the hand, the subject flexes from full extension to 120, pauses and returns to full extension. |
| Elbow flexion-extension with pauses (FEP) | With the elbow at full extension, the subject flexes until reaching 120, pauses and extends his/her elbow back to full extension. The subject also pauses once at some point during the flexion portion and once at some point during the extension portion of the motion. The pausing angles are chosen randomly by the subject. |
| Elbow flexion-extension with varying starting angles (FES) | The subject begins at a chosen flexion angle, proceeds to flex his/her elbow until reaching 120, pauses and then extends until reaching full extension. For each of the three repetitions, the subject started at 20, 60 and 100, respectively. |
| Total Muscle Activation Error (×10−3) | Total Muscle Torque Error (Nm) | Data Point Optimization Time (μs) | Number of Datasets | |
|---|---|---|---|---|
| Model ID | Model Averages | |||
| Model 1 | 0.706 ± 0.947 * | 2.15 ± 1.42 | 99.75 ± 17.69 | 78 |
| Model 2 | 0.706 ± 0.947 * | 2.15 ± 1.42 | 156.09 ± 23.42 | 78 |
| Model 3 | 0.835 ± 1.086 | 2.10 ± 1.49 | 255.56 ± 212.66 | 78 |
| Model 4 | 0.901 ± 1.151 | 2.17 ± 1.50 | 766.40 ± 803.18 | 78 |
| Model 5 | 0.946 ± 1.128 * | 2.19 ± 1.47 * | 301.88 ± 329.06 * | 78 |
| Model 6 | 0.702 ± 1.064 | 1.67 ± 0.74 * | 266.61 ± 116.58 * | 78 |
| Model 7 | 0.974 ± 1.179 * | 2.19 ± 1.50 * | 375.38 ± 356.94 | 78 |
| Motion ID | Motion Averages | |||
| FE | 0.684 ± 0.516 | 1.83 ± 0.83 | 392.17 ± 621.58 | 42 |
| EF120 | 0.718 ± 0.654 * | 1.88 ± 0.87 | 326.37 ± 430.08 | 126 |
| FEM | 1.533 ± 1.875 * | 2.84 ± 2.21 * | 295.84 ± 342.42 | 126 |
| FEP | 0.622 ± 0.450 * | 2.02 ± 1.03 * | 350.04 ± 511.41 | 126 |
| FES | 0.489 ± 0.358 * | 1.71 ± 0.87 * | 281.55 ± 288.17 | 126 |
| Number of Parameters | Number of Parameters Averages | |||
| 1 | 0.706 ± 0.944 | 2.15 ± 1.42 | 127.92 ± 35.02 | 156 |
| 2 | 0.871 ± 1.121 | 2.06 ± 1.38 | 393.17 ± 471.87 | 390 |
| Total | 0.824 ± 1.075 | 2.09 ± 1.39 | 317.38 ± 416.73 | 546 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Desplenter, T.; Trejos, A.L. Evaluating Muscle Activation Models for Elbow Motion Estimation. Sensors 2018, 18, 1004. https://doi.org/10.3390/s18041004
Desplenter T, Trejos AL. Evaluating Muscle Activation Models for Elbow Motion Estimation. Sensors. 2018; 18(4):1004. https://doi.org/10.3390/s18041004
Chicago/Turabian StyleDesplenter, Tyler, and Ana Luisa Trejos. 2018. "Evaluating Muscle Activation Models for Elbow Motion Estimation" Sensors 18, no. 4: 1004. https://doi.org/10.3390/s18041004
APA StyleDesplenter, T., & Trejos, A. L. (2018). Evaluating Muscle Activation Models for Elbow Motion Estimation. Sensors, 18(4), 1004. https://doi.org/10.3390/s18041004