Sparse Unorganized Point Cloud Based Relative Pose Estimation for Uncooperative Space Target


Abstract
:1. Introduction
2. Related Work
3. Proposed Relative Pose Determination Method
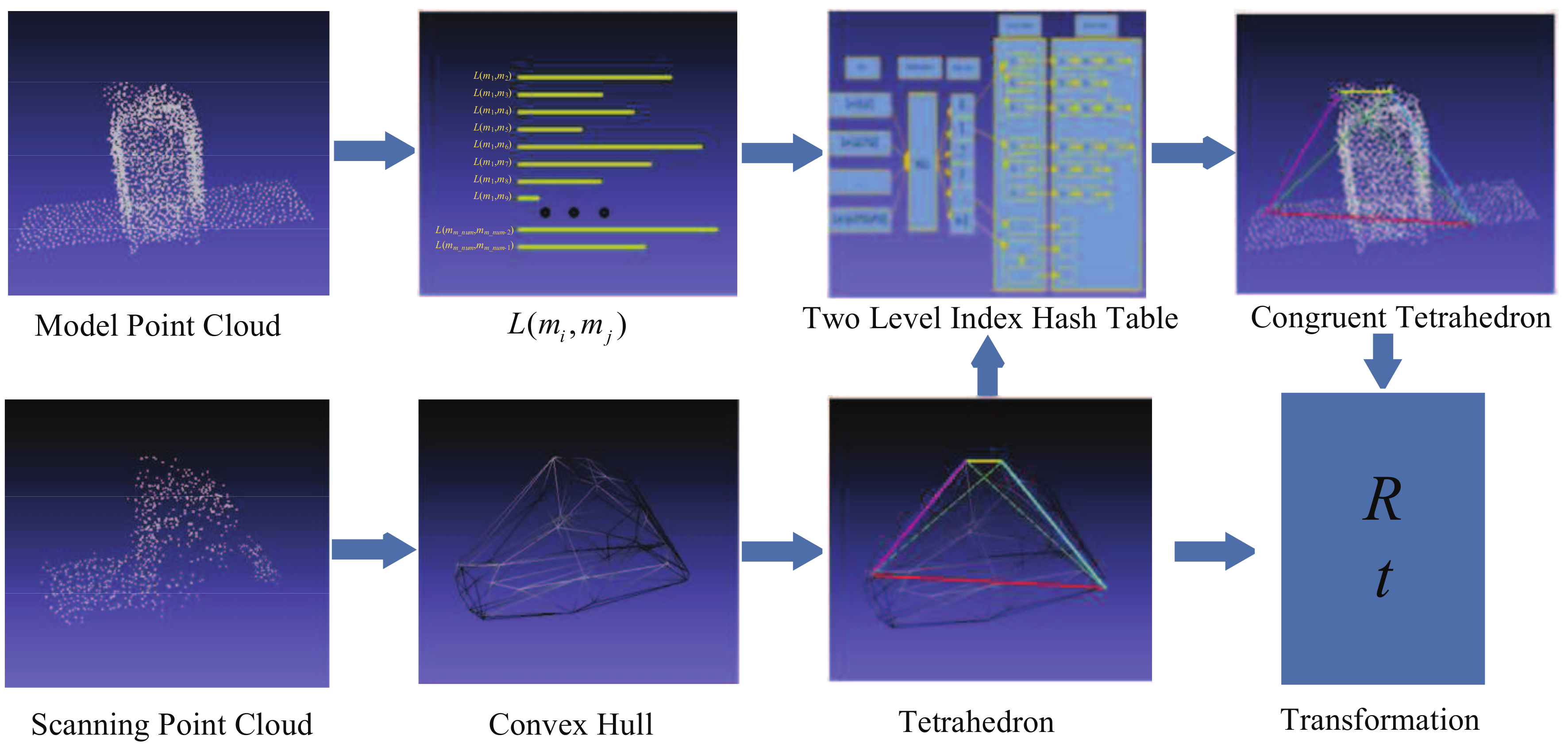
3.1. CTA Algorithm
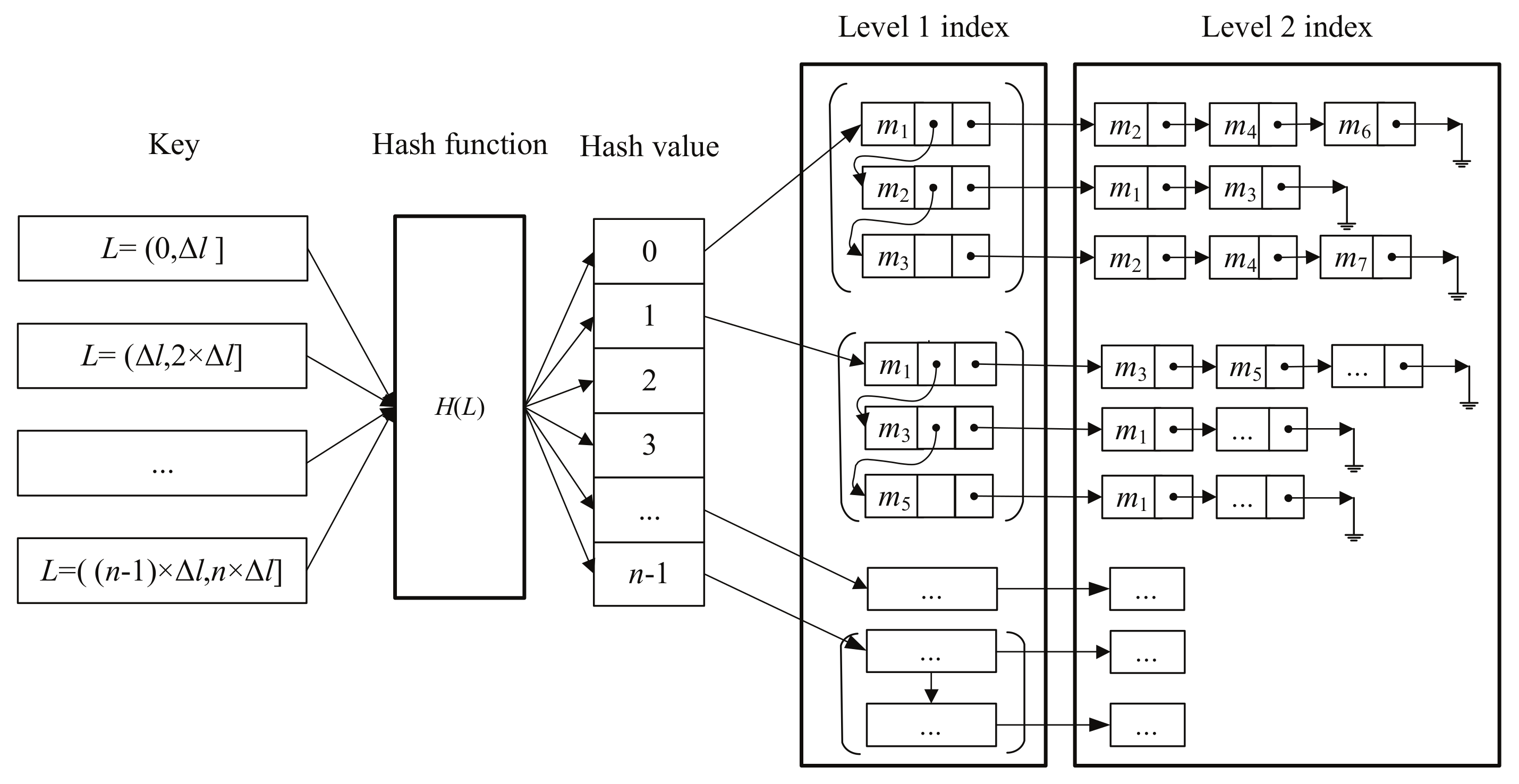
3.1.1. Congruent Tetrahedron Searching Based on Two-Level Index Hash Table
| Algorithm 1 Searching the congruent tetrahedron |
| Input: : four vertexes of ; : hash table |
| Output: : four vertexes of |
|
3.1.2. Selection Tetrahedron from Scanning Point Cloud
3.1.3. Calculation of Transformation
3.1.4. CTA Failure Detection Approach
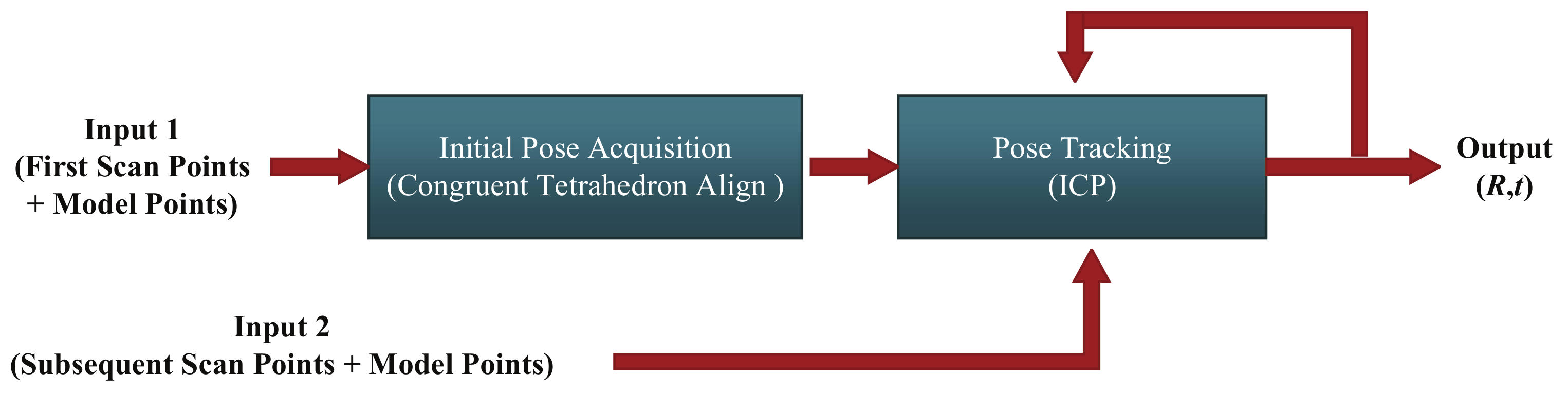
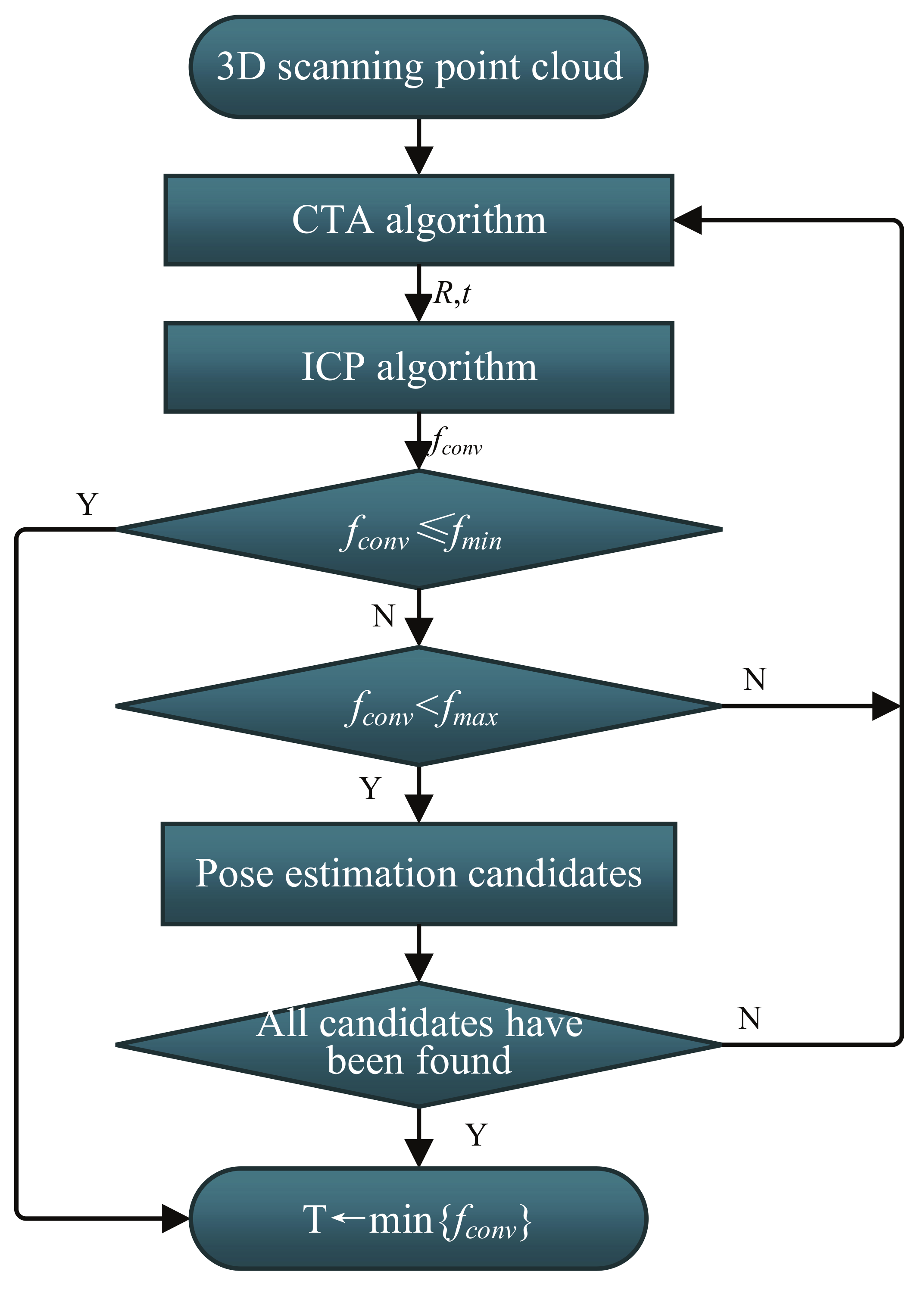
3.2. Pose Tracking
- (1)
- For the first scanning point cloud, using CTA algorithm to calculate the transformation ;
- (2)
- For the second frame, using CTA algorithm to calculate the transformation ;
- (3)
- For the second frame, calculating the transformation using as the initial pose in another thread;
- (4)
- Computing the relative translation between and , , and the Euler angles , , can be determined from . If ( are the thresholds), the CTA algorithm is considered as a stable and accurate initial value, and then goto step (5). Otherwise, the result of the CTA algorithm is incorrect, then replace with and go to step (3);
- (5)
- For the subsequent frames, using ICP algorithm to calculate the transformation for pose tracking.
4. Analysis of Influence Factors
5. Experiments
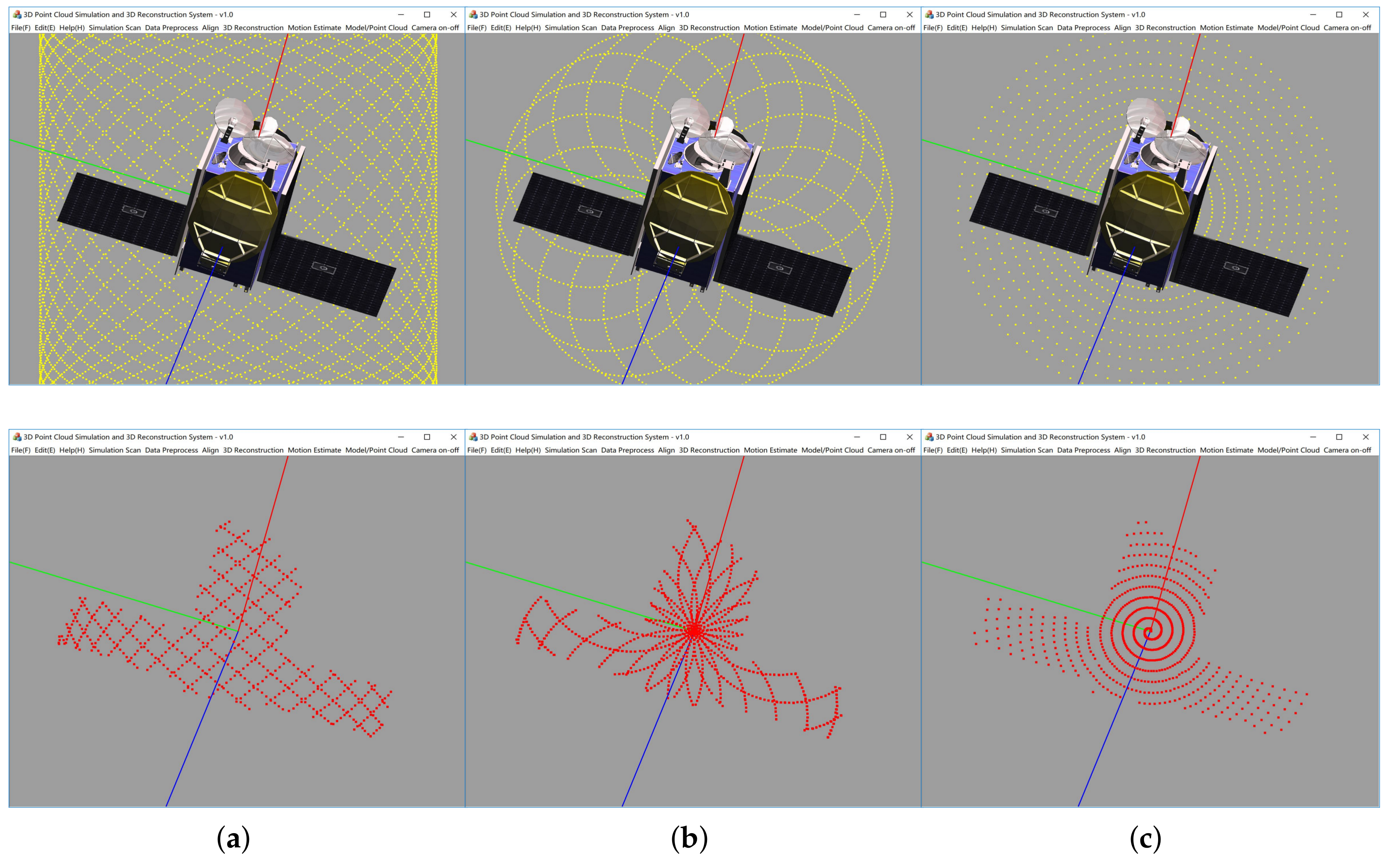
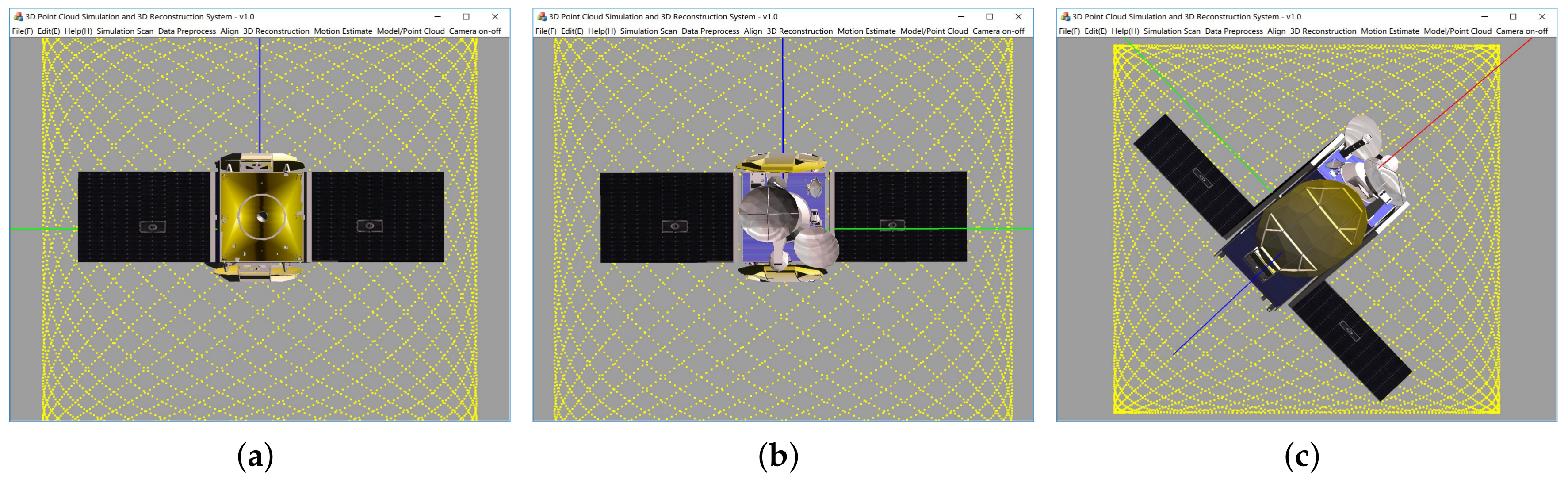
5.1. Simulation System
5.2. Impact of Different
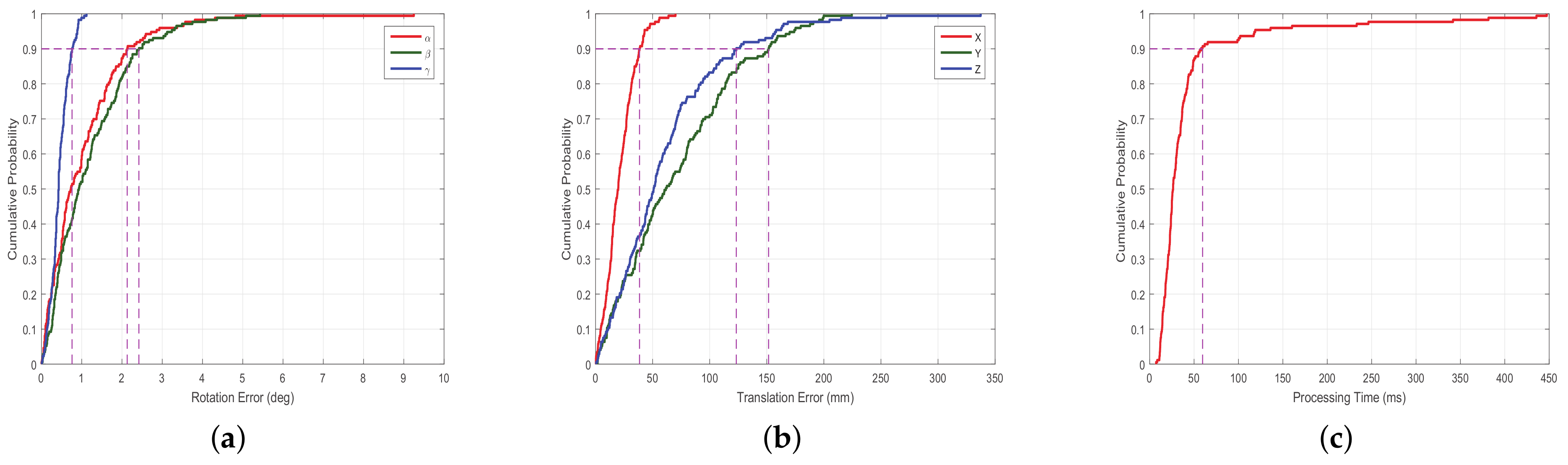
5.3. CTA Algorithm Test
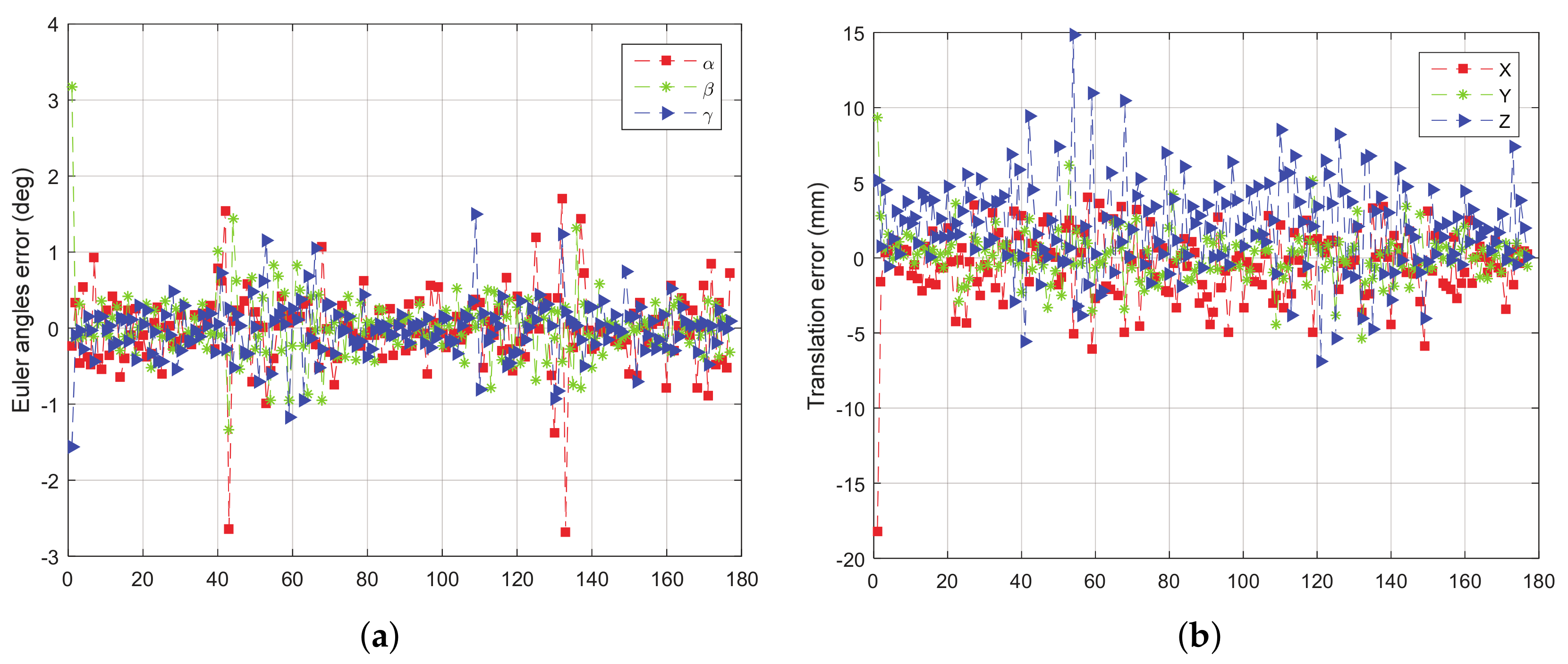
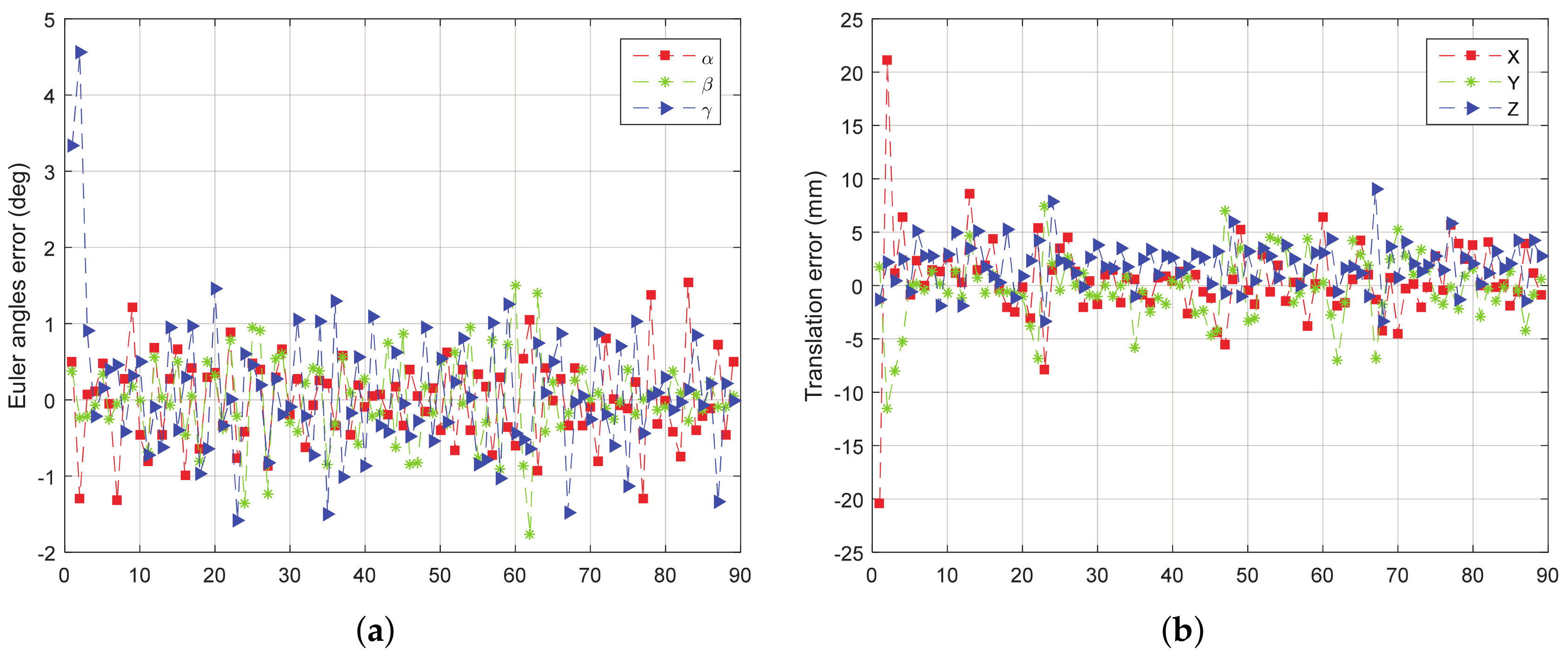
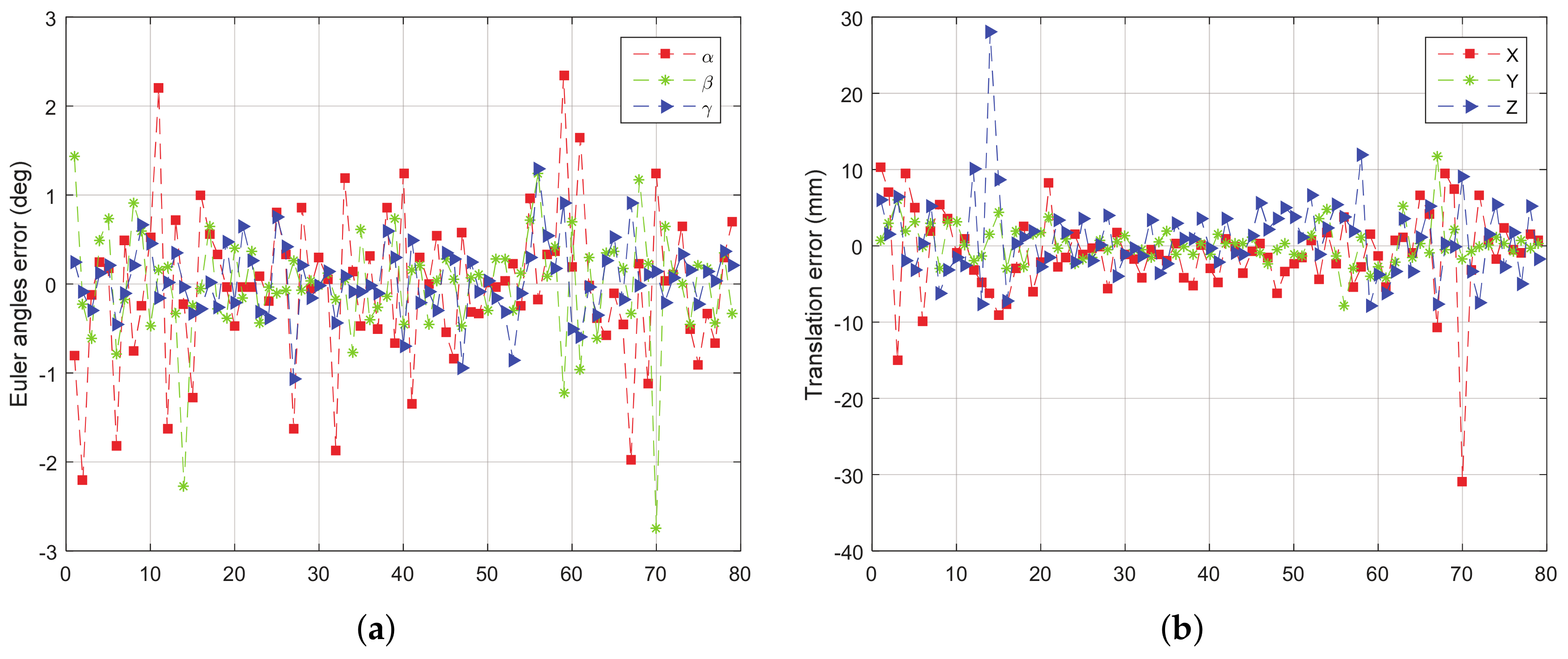
5.4. Pose Tracking Test
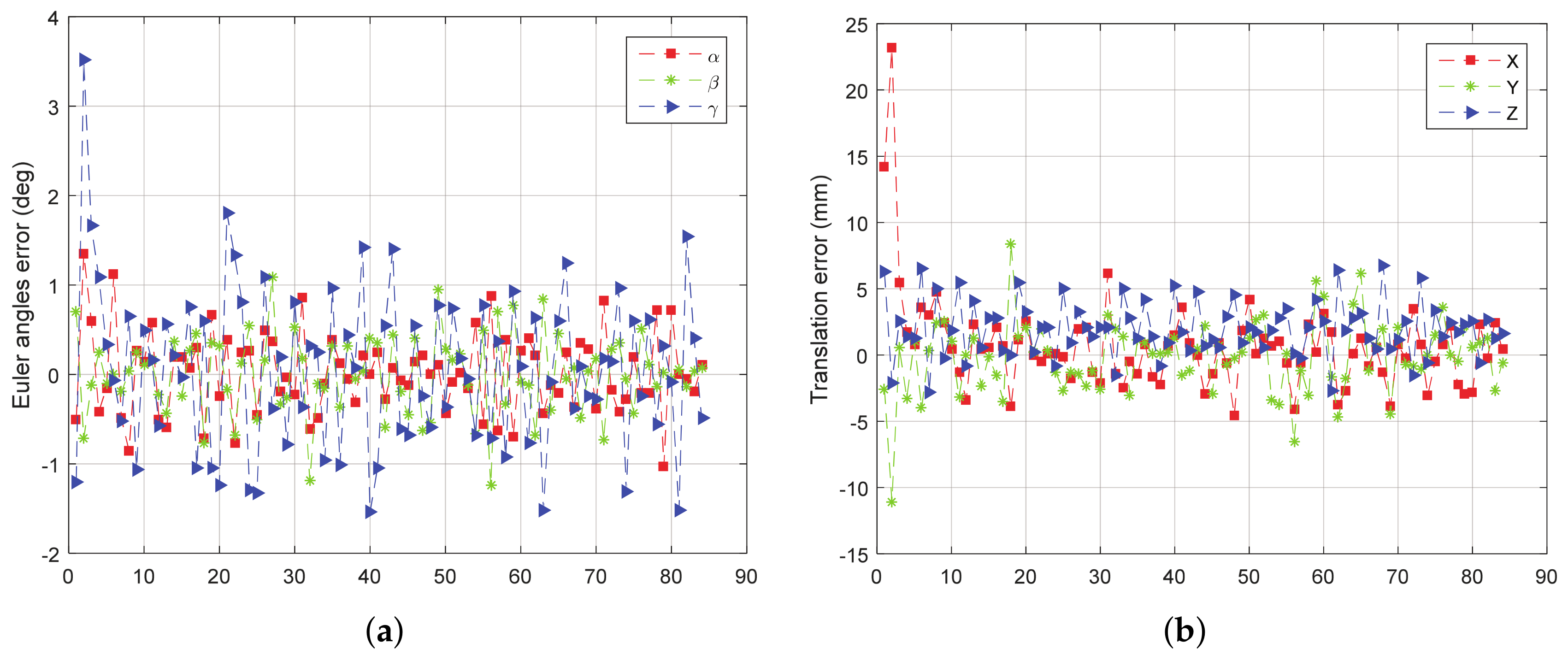
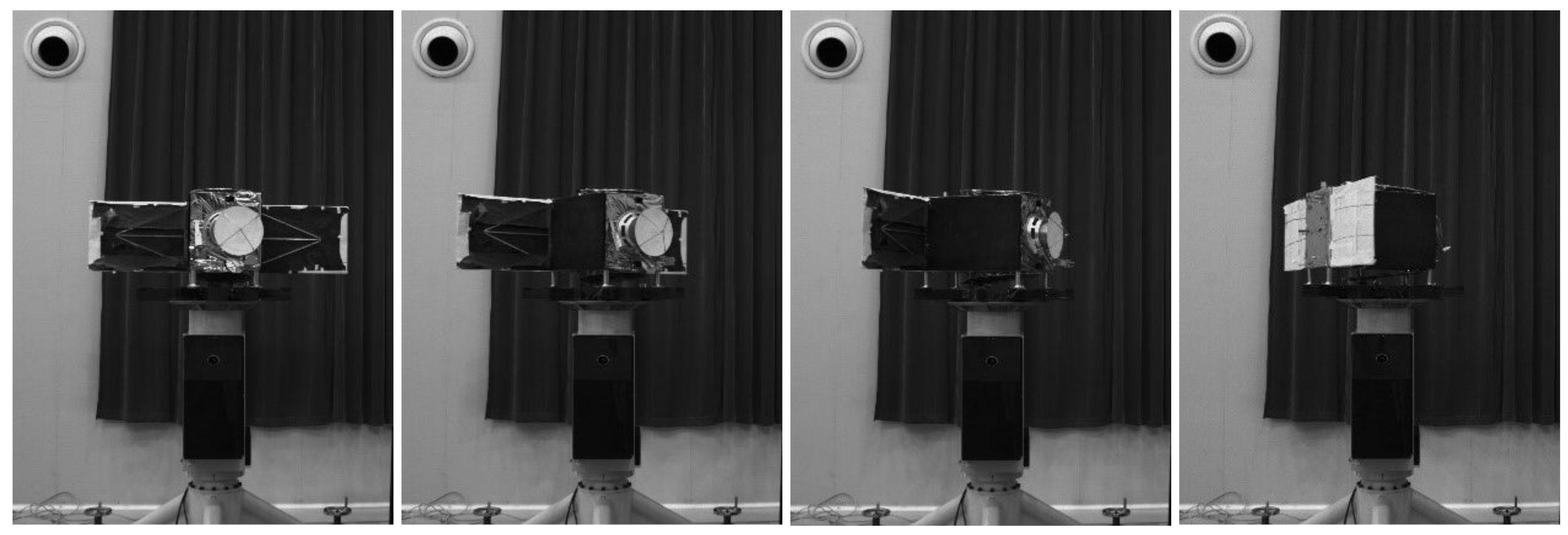
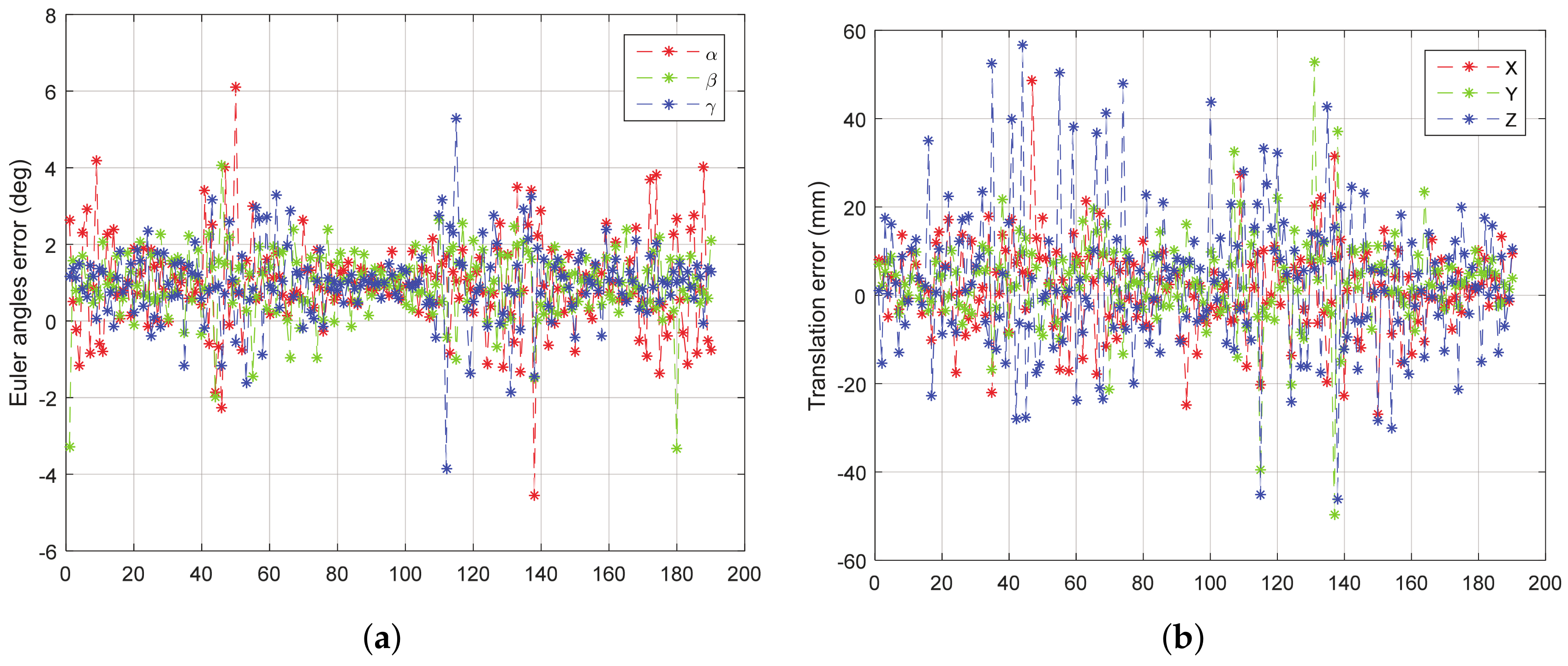
5.5. Field Experiment
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. Prog. Aeosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef]
- Tatsch, A.; Fitz-Coy, N.; Gladun, S. On-orbit servicing: A brief survey. In Proceedings of the 2006 Performance Metrics Intelligent Systems Workshop, Gaithersburg, MD, USA, 21–23 August 2006; pp. 276–281. [Google Scholar]
- Bonnal, C.; Ruault, J.M.; Desjean, M.C. Active debris removal: Recent progress and current trends. Acta Astronaut. 2013, 85, 51–60. [Google Scholar] [CrossRef]
- Zhang, H.; Jiang, Z.; Elgammal, A. Vision-based pose estimation for cooperative space objects. Acta Astronaut. 2013, 91, 115–122. [Google Scholar] [CrossRef]
- Wang, X.; Şekercioğlu, Y.A.; Drummond, T. Vision-Based Cooperative Pose Estimation for Localization in Multi-Robot Systems Equipped with RGB-D Cameras. Robotics 2014, 4, 1–22. [Google Scholar] [CrossRef]
- Christian, J.A.; Robinson, S.B.; DŚouza, C.N.; Ruiz, J.P. Cooperative relative navigation of spacecraft using flash light detection and ranging sensors. J. Guid. Control Dyn. 2014, 37, 452–465. [Google Scholar] [CrossRef]
- Weismuller, T.; Leinz, M. GN&C technology demonstrated by the orbital express autonomous Rende vous and capture sensor system. In Proceedings of the 29th Annual American Astronautical Society Guidance and Control Conference, Breckenridge, CO, USA, 4–8 February 2006. [Google Scholar]
- Bodin, P.; Noteborn, R.; Larsson, R.; Karlsson, T.; DÁmico, S.; Ardaens, J.S.; Ardaens, J.-S.; Delpech, M.; Berges, J.-C. Prisma Formation Flying Demonstrator: Overview and Conclusions from the Nominal Mission. In Proceedings of the 35th Annual American Astronautical Society Guidance and Control Conference, Breckenridge, CO, USA, 3–8 February 2012; pp. 441–460. [Google Scholar]
- Volpe, R.; Sabatini, M.; Palmerini, G.B. Pose and Shape Reconstruction of a Noncooperative Spacecraft Using Camera and Range Measurements. Int. J. Aerosp. Eng. 2017, 2017. [Google Scholar] [CrossRef]
- Volpe, R.; Palmerini, G.B.; Sabatini, M. Monocular and lidar based determination of shape, relative attitude and position of a non-cooperative unknown satellite. In Proceedings of the 68th International Astronautical Congress 2017, Adelaide, Australia, 25–29 September 2017. [Google Scholar]
- Woods, J.O.; Christian, J.A. Lidar-based relative navigation with respect to non-cooperative objects. Acta Astronaut. 2016, 126, 298–311. [Google Scholar] [CrossRef]
- Besl, P.D.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Ning, M.; Zhang, S.; Wang, S. A Non-Cooperative Satellite Feature Point Selection Method for Vision-Based Navigation System. Sensors 2018, 18, 854. [Google Scholar] [CrossRef] [PubMed]
- D’Amico, S.; Benn, M.; Jørgensen, J.L. Pose estimation of an uncooperative spacecraft from actual space imagery. Int. J. Space Sci. Eng. 2014, 2, 171–189. [Google Scholar]
- Cai, J.; Huang, P.; Zhang, B.; Wang, D. A TSR Visual Servoing System Based on a Novel Dynamic Template Matching Method. Sensors 2015, 15, 32152–32167. [Google Scholar] [CrossRef] [PubMed]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. Epnp: An accurate o(n) solution to the pnp problem. Int. J. Comput. Vis. 2009, 81, 155–166. [Google Scholar] [CrossRef] [Green Version]
- Kneip, L.; Scaramuzza, D.; Siegwart, R. A novel parametrization of the perspective-three-point problem for a direct computation of absolute camera position and orientation. In Proceedings of the 24th IEEE Conference on Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20–25 June 2011; pp. 2969–2976. [Google Scholar]
- Zheng, Y.; Kuang, Y.; Sugimoto, S.; Astrom, K. Revisiting the PnP Problem: A Fast, General and Optimal Solution. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 3–6 December 2013; pp. 2344–2351. [Google Scholar]
- Dufour, R.M.; Miller, E.L.; Galatsanos, N.P. Template Matching Based Object Recognition with Unknown Geometric Parameters. IEEE Trans. Image Process. 2002, 11, 1385–1396. [Google Scholar] [CrossRef] [PubMed]
- David, P.; Dementhon, D.; Duraiswami, R.; Samet, H. Softposit: Simultaneous pose and correspondence determination. Int. J. Comput. Vis. 2004, 59, 259–284. [Google Scholar] [CrossRef]
- Gold, S.; Rangarajan, A. A graduated assignment algorithm for graph matching. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 377–388. [Google Scholar] [CrossRef]
- Gold, S.; Rangarajan, A.; Lu, C.-P.; Pappu, S.; Mjolsness, E. New algorithms for 2D and 3D point matching: Pose estimation and correspondence. Pattern Recognit. 1998, 31, 1019–1031. [Google Scholar] [CrossRef]
- DeMenthon, D.; Davis, L.S. Model-based object pose in 25 lines of code. Int. J. Comput. Vis. 1995, 15, 123–141. [Google Scholar] [CrossRef]
- Jasiobedzki, P.; Se, S.; Pan, T.; Umasuthan, M.; Greenspan, M. Autonomous satellite rendezvous and docking using LIDAR and model based vision. In SPIE Spaceborne Sensor II; SPIE: Bellingham, WA, USA, 2005. [Google Scholar] [CrossRef]
- Sommer, I. Ahrns, GNC for a rendezvous in space with an uncooperative target. In Proceedings of the 5th International Conference on Spacecraft Formation Flying Missions and Technologies, Munich, Germany, 29–31 May 2013; pp. 1–15. [Google Scholar]
- Opromolla, R.; Fasano, G.; Rufino, G.; Grassi, M. Uncooperative pose estimation with a LIDAR-based system. Acta Astronaut. 2015, 110, 287–297. [Google Scholar] [CrossRef]
- Opromolla, R.; Fasano, G.; Rufino, G.; Grassi, M. A model-based 3D template matching technique for pose acquisition of an uncooperative space object. Sensors 2015, 15, 6360–6382. [Google Scholar] [CrossRef] [PubMed]
- Opromolla, R.; Fasano, G.; Rufino, G.; Grassi, M. Pose Estimation for Spacecraft Relative Navigation Using Model-based Algorithms. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 431–447. [Google Scholar] [CrossRef]
- Aldoma, A.; Tombari, F.; Rusu, R.B.; Vincze, M. OUR-CVFH: Oriented, Unique and Repeatable Clustered Viewpoint Feature Histogram for Object Recognition and 6DOF Pose Estimation. In Pattern Recognition; Springer: Berlin, Germany, 2012. [Google Scholar]
- Liu, L.; Zhao, G.; Bo, Y. Point Cloud Based Relative Pose Estimation of a Satellite in Close Range. Sensors 2016, 16, 824. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Li, H.; Jia, Y. Go-ICP: Solving 3D registration efficiently and globally optimally. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 3–6 December 2013; pp. 1457–1464. [Google Scholar]
- Hartley, R.I.; Kahl, F. Global optimization through rotation space search. Int. J. Comput. Vis. 2009, 82, 64–79. [Google Scholar] [CrossRef]
- Ruel, S.; Luu, T.; Anctil, M.; Gagnon, S. Target localization from 3D data for on-orbit autonomous rendezvous and docking. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–11. [Google Scholar]
- Barber, C.B.; Dobkin, D.P.; Huhdanpaa, H. The quickhull algorithm for convex hulls. ACM Trans. Math. Softw. 1996, 22, 469–483. [Google Scholar] [CrossRef]
- Barber, C.B.; Dobkin, D.P.; Huhdanpaa, H. Qhull: Quickhull Algorithm for Computing the Convex Hull; Astrophysics Source Code Library: Houghton, MI, USA, 2013; record ascl:1304.016. [Google Scholar]
- Chand, D.R.; Kapur, S.S. An Algorithm for Convex Polytopes. J. ACM 1970, 17, 78–86. [Google Scholar] [CrossRef]
- Cintra, M.; Llanos, D.R.; Palop, B. Speculative Parallelization of a Randomized Incremental Convex Hull Algorithm. In Proceedings of the 2004 International Conference on Computational Science and its Applications, Assisi, Italy, 14–17 May 2004; pp. 188–197. [Google Scholar]
- English, C.; Okouneva, G.; Saint-Cyr, P.; Choudhuri, A.; Luu, T. Real-time dynamic pose estimation systems in space: Lessons learned for system design and performance evaluation. Int. J. Intell. Control Syst. 2011, 16, 79–96. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| binNum | Time/ms | Points Num | X/mm | Y/mm | Z/mm | Error Rate/% | |||
|---|---|---|---|---|---|---|---|---|---|
| 5 | 28,752.59 | 102 | 1.36 | 1.60 | 0.50 | 23.53 | 81.40 | 81.82 | 0 |
| 10 | 1703.99 | 102 | 1.53 | 1.58 | 0.52 | 25.04 | 75.07 | 85.24 | 0 |
| 15 | 221.18 | 102 | 1.92 | 1.63 | 0.51 | 27.00 | 70.12 | 92.00 | 0 |
| 20 | 62.24 | 102 | 1.76 | 1.92 | 0.51 | 27.16 | 75.03 | 85.45 | 0 |
| 25 | 33.27 | 102 | 1.77 | 1.55 | 0.54 | 24.98 | 86.77 | 81.04 | 2.8 |
| 30 | 17.23 | 102 | 1.72 | 1.77 | 0.53 | 25.63 | 75.01 | 83.10 | 5.7 |
| 35 | 17.17 | 102 | 1.50 | 1.78 | 0.53 | 22.45 | 85.64 | 95.75 | 11.4 |
| 40 | 15.11 | 102 | 1.30 | 1.46 | 0.49 | 21.34 | 96.88 | 72.48 | 25.7 |
| 50 | 14.98 | 103 | 1.46 | 1.41 | 0.56 | 22.79 | 88.69 | 89.51 | 34.3 |
| 60 | 13.14 | 104 | 1.60 | 1.52 | 0.37 | 19.16 | 69.69 | 71.50 | 60 |
| 70 | 14.49 | 106 | 2.78 | 2.01 | 0.55 | 23.17 | 94.40 | 60.70 | 85.7 |
| 80 | 13.95 | 105 | 2.03 | 1.58 | 0.52 | 26.64 | 89.31 | 76.10 | 80 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, F.; Chou, W.; Wu, Y.; Yang, G.; Xu, S. Sparse Unorganized Point Cloud Based Relative Pose Estimation for Uncooperative Space Target. Sensors 2018, 18, 1009. https://doi.org/10.3390/s18041009
Yin F, Chou W, Wu Y, Yang G, Xu S. Sparse Unorganized Point Cloud Based Relative Pose Estimation for Uncooperative Space Target. Sensors. 2018; 18(4):1009. https://doi.org/10.3390/s18041009
Chicago/Turabian StyleYin, Fang, Wusheng Chou, Yun Wu, Guang Yang, and Song Xu. 2018. "Sparse Unorganized Point Cloud Based Relative Pose Estimation for Uncooperative Space Target" Sensors 18, no. 4: 1009. https://doi.org/10.3390/s18041009
APA StyleYin, F., Chou, W., Wu, Y., Yang, G., & Xu, S. (2018). Sparse Unorganized Point Cloud Based Relative Pose Estimation for Uncooperative Space Target. Sensors, 18(4), 1009. https://doi.org/10.3390/s18041009