1. Introduction
With the development of satellite sensors, high-precision 3D reconstruction based on satellite stereoscopic image pairs is one of the most important topics in the remote-sensing field, especially in urban areas. Area-based dense matching is a crucial step in the image-based automatic 3D reconstruction process since feature-based matching cannot provide sufficient information for dense matching [
1,
2,
3]. The dense matching accuracy directly affects the reconstruction results. However, for building objects reconstruction in urban areas, the elevation information is mutated from the building height to zero, and the terrain is discontinuous. Besides, the edge regions of building objects are the nonoverlapping regions, because of satellite stereoscopic image pairs from different angles. They will bring great challenges to area-based dense matching methods leading to obvious matching errors at the elevation discontinuity of building edges. It will be an obstacle to obtain high-precision 3D reconstruction results of building objects in urban areas. The increasing spatial resolution of satellite imaging, ranging from 0.5 m to 2 m in the panchromatic band, has allowed clear edge information to be useful for precise 3D information extraction. In the paper, the building edge characteristics from high-resolution satellite images are fully exploited in the dense matching process. We improved the dense matching method by extracting accurate building edges and outline features for keeping building object structure features in the disparity map.
For the accurate building structure feature extraction, many researchers extract building regions based on image segmentation and classification methods, which explore the full potential of the building features in high-resolution satellite images [
4,
5]. Karadag et al. [
6] integrated various kinds of features related to the buildings to improve the image segmentation process for building extraction. Senaras [
7] used a machine learning algorithm to fuse various classifiers trained on the automatically generated dataset with relevant features of buildings for the building classification. Huang and Zhang [
8] proposed a morphological building index (MBI) to build the relationship between the morphological operators and the structural features of buildings for building detection. Chaudhuri and Samal [
9] exploited the interactions of spatial and spectral domain knowledge about the buildings in the scene to conclude the impact on the results of building segmentation. All the methods mentioned fuse some building characteristics, e.g., shape, texture, shadow, brightness, and local contrast, to distinguish buildings from backgrounds for accurate building extraction. However, the building outlines from the above methods are usually smooth and rounded, which cannot retain the key properties of most buildings with perpendicular straight edges. This might lead to losing the advantage of high resolution. In recent researches, line segments have been considered in the process of building extraction. Wang [
10] made the use of line segments extracted and auxiliary vertices in the diagonal by rectangle rule to extract building outlines, which can obtain regular and accurate rectangular building shape. However, for complex and irregular linear buildings, Wang’s method by simple rectangular rule is limited.
For the area-based dense matching methods, there are two main types of algorithms:local methods and global methods. The classical SSD (the Sum of Squared Differences), SAD (Sum of Absolute Differences), NCC (Normal Cross Correlation) all belong to local methods [
11]. In the local methods, some feature-based matching constraint methods are proposed to improve the area-based dense matching accuracy [
12]. Jyoti Joglekar [
13] proposed to use SIFT features and relaxation labeling technique to constraint area-based method. Li [
14] proposed key point features to preserve the accurate building shape for matching. Moreover, belief propagation [
15], graph cut [
16], MRF [
17], etc. are all global methods. In most cases, the matching accuracy by global methods is better than that by local methods. However, global methods need cost much more time. Therefore, the semi-global matching (SGM) method [
18] is proposed for a tradeoff between accuracy and complexity, which has a great performance in the dense matching field. However, all the matching methods above mainly focus on the global accuracy, which cannot ensure the high matching accuracy for each building object. In the multiview stereo, some object-based methods are proposed such as Y. Furukawa’s method [
19] and M. P. Deseilligny’s method [
20], which can solve the nonoverlapping problem by multiview observation with more information. They generally need three more images and cannot achieve the accuracy to keep the building object structure characteristics.
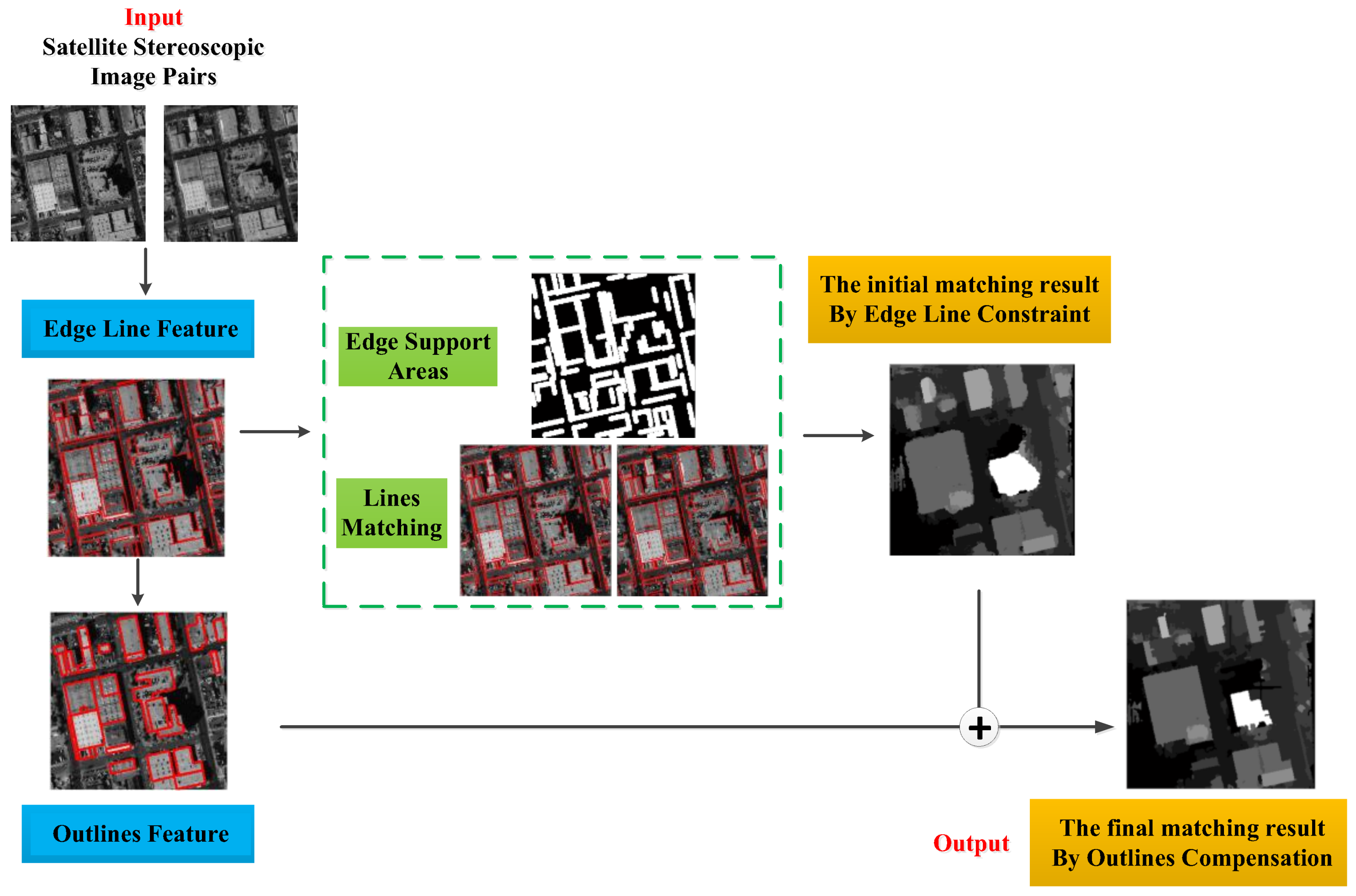
Based on the above review, there are three main contributions in the paper. Firstly, we proposed an improved line adjustment method to correct the edge segments fitting buildings closely. Furthermore, a fusion method based on edge line segments and building detection are proposed to obtain the outlines with accurate building structure characteristics. Finally, but arguably most importantly, edge constraint and outline compensation (ECAOC) dense matching method is proposed in the paper. The improved edge lines are used to optimize matching search scope and matching template window, and the high-precision building outlines are used to compensate the shape feature of building objects. Our ECAOC dense matching method can obtain more accurate matching results to maintain building object structural attribute in the disparity map.
The remaining parts of this paper have been organized as follows. In
Section 2, the whole dense matching method algorithm is described. The building structure feature extraction fusion method and edge constraint and outline compensation dense matching method are shown in
Section 3 and
Section 4 in detail, respectively. Our experimental results are shown by comparing with other methods in
Section 5, and the conclusions are drawn in
Section 6.
3. Building Structure Feature Extraction Method
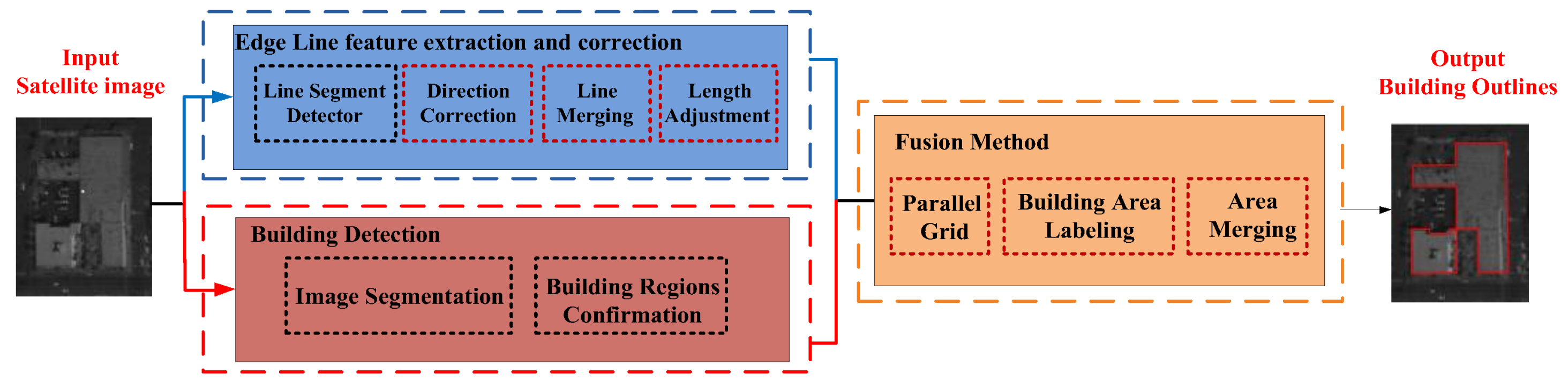
The most important structure features of building objects are edge line feature and outline feature. In addition, the edge line feature extraction is the basic of outline feature extraction. A novel fusion method is proposed to obtain high-precision building outlines automatically from VHR panchromatic satellite images. The proposed algorithm consists of three stages as shown in
Figure 2. The main purpose of our fusion method is to combine straight edge line features and building detection results for accurate and regular outline feature with building structural properties.
3.1. Edge Line Feature Extraction and Correction
To extract the building outline feature, every straight-line feature in the image is detected first as it represents building edge. LSD is an efficient line detection method proposed by Von Gioi, and with the help of the Number of False Alarms checking. It can give reliable results of line segment detection [
21,
22].
However, the line extraction results by LSD, which are jumbled and irregular, do not meet the demands of the edge line feature extraction. Therefore, some work [
10,
23] proposed the joint criteria to improve the edge segments. In this paper, for accurate building outline, we propose an improved line correction method to achieve edge line feature fitting buildings closely, which include three steps: (1) direction correction; (2) line merging; (3) length adjustment.
(1) Direction Correction: Since buildings are mostly modelled as polygonal objects with their edges parallel or perpendicular to each other and buildings in the same area usually share the same orientation. Therefore, edge segments can be corrected to the same or orthogonal to the building orientation [
23,
24]. To determine the building orientation, the orientation angles of all the line segments, which are the basic lines extracted by LSD, are distributed into
n bins. In addition, within each bin, the lengths of line segments are accumulated as the value
L. Suppose
li is the length of every line segment in the max value
L corresponding interval and
αi is the angle of the line segment. The building orientation is called primary orientation
αp, which can be computed as (1). As the primary orientation is determined, the secondary orientation, which is approximately perpendicular to the primary orientation, can be obtained in the same way to compute the weighted average. Then, all edge segments that share the same orientation angle, with the primary or secondary orientation angle up to a tolerance, are rotated to be aligned. The tolerance is 22.5 degree in the paper.
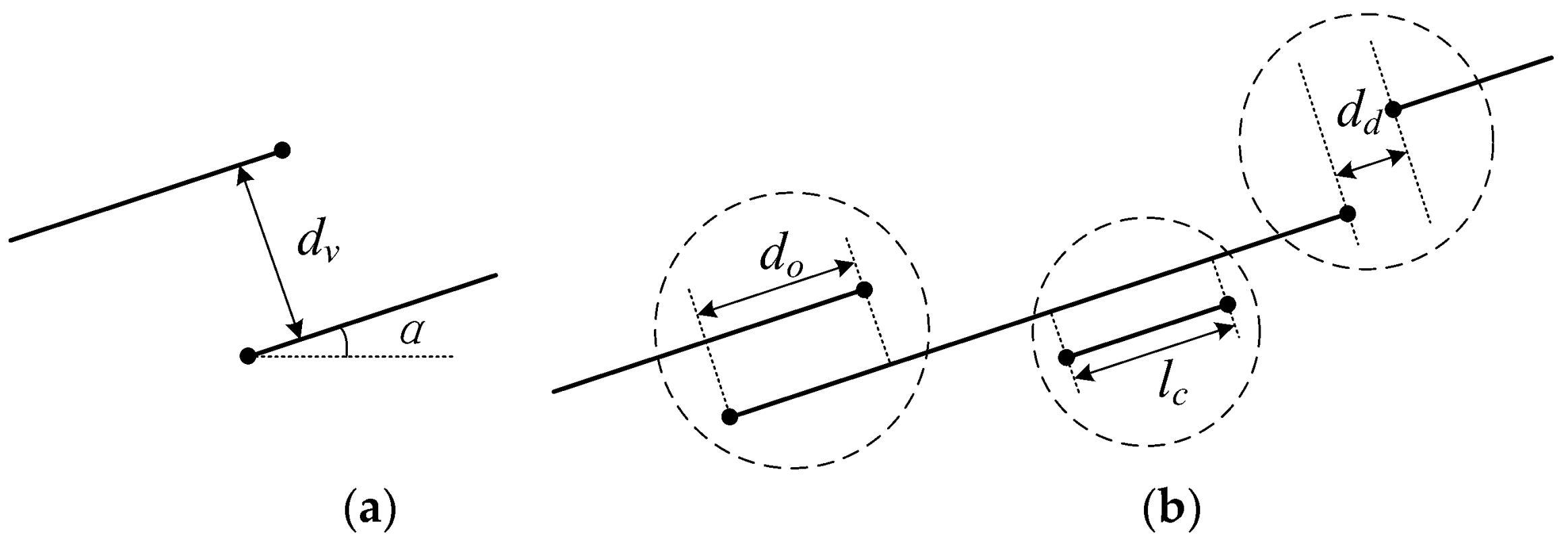
(2) Line merging: After the direction correction, the line segments are still just parts of edges and they need to be linked. There is one premise and three criteria for merging procedure, which are shown in
Figure 3. Once the premise and one of the criteria are satisfied, the two segments are merged.
Premise: The lateral distance dv < T1.
Criterion 1: Two segments are overlapped, and do > 0.
Criterion 2: A short line is covered by another longer segment, and lc > 0.
Criterion 3: Two segments are detached, and dd < T2.
If the coordinates of endpoints shown in each dashed circle are (
x1,
y1) and (
x2,
y2), respectively,
dv and
dd can be expressed by the following equations:
The threshold T1 and T2 are discussed in the experimental part. The location of the merged edge segment, which is supposed to be parallel to and close to the longer original segment, is computed by the original lengths as weights.
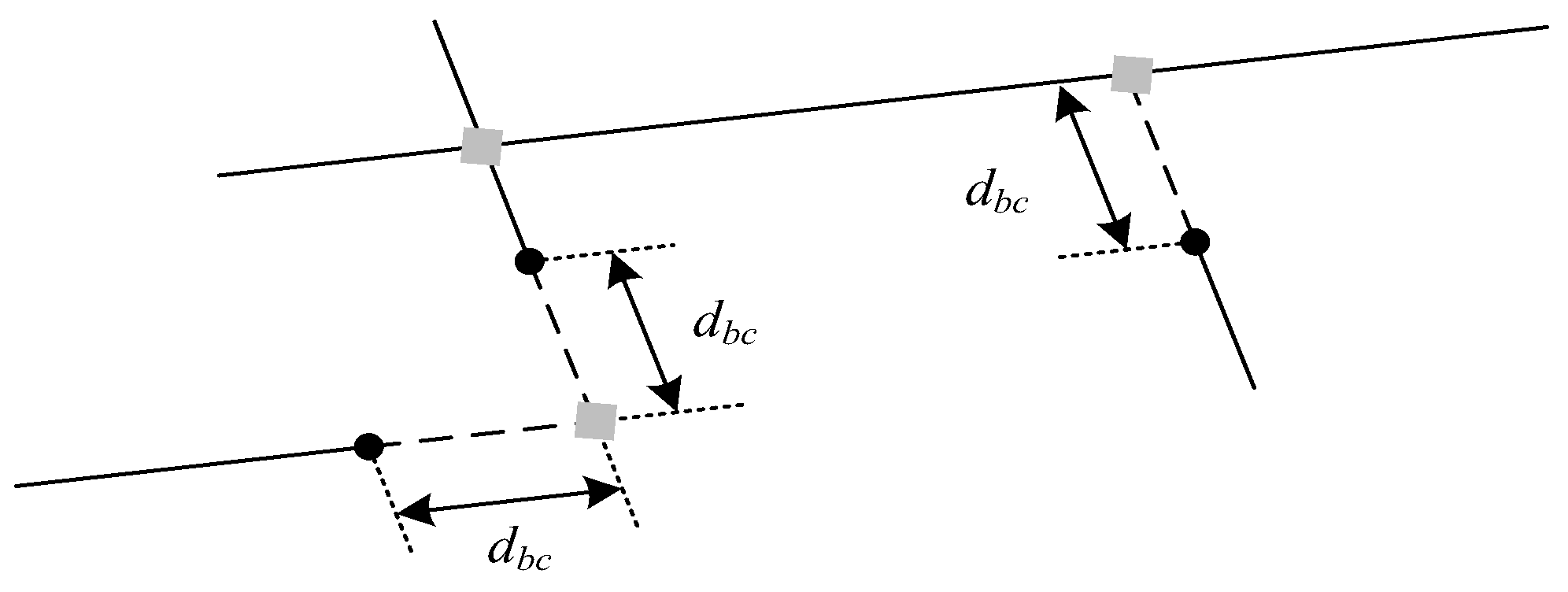
(3) Length Adjustment: It is common sense that every building edge should be linked to the building corners. Therefore, the potential building corners are detected, and the corresponding edge segments are extended to be linked to them.
Figure 4 shows three kinds of points that need to be detected as building corners and linked under different conditions. The valid line segments represent the edge segments and the dashed line segments represent extending lines of the corresponding segments. All possible building corners and the line endpoints are shown as gray squares and dots, respectively. The three conditions are expressed as:
Condition 1: The intersection of two edge segments should be detected as a corner.
Condition 2: The extending lines of two edge segments are intersected, and dbc < T3.
Condition 3: The extending line of one edge segment is intersected with another edge segment, and dbc < T3.
The threshold T3 is discussed in the next part. Till now, the building edge segment features are extracted. After the proposed line correction method, the edge segments extracted are neat and regular to fit the building outlines.
3.2. Building Detection
For the final building outline feature extraction, building detection is a critical step to confirm the building regions. In the section, a state-of-the-art image segmentation algorithm called ORT is employed. The segmentation method is proposed by McCann [
25,
26]. It is an unsupervised image segmentation method for our automatic extraction process. Moreover, ORT method does not rely on edge information, which is independent of achieving clustered results for building regions having nothing to do with edge segment features. In this case, the building regions confirmation by ORT can be complementary with the edge segments to be useful for further outline extraction.
Because of the ORT method making full use of the texture and gray-level characteristics, and the building regions are obviously segmented to one or two classes. Therefore, only mean value and standard deviation are used for further building regions confirmation from the few 3–5 clustered results.
3.3. The Proposed Fusion Method for Building Outline Feature
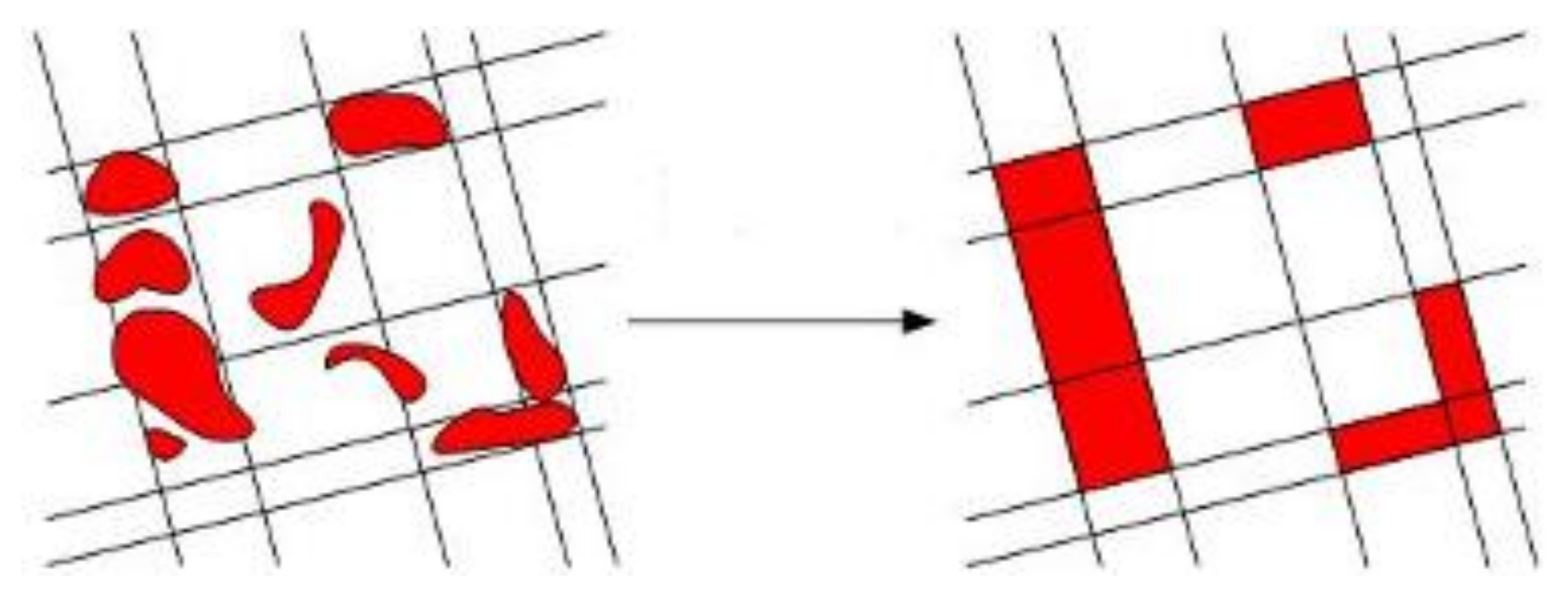
Owing to buildings having parallel or vertical edges as the key attribute, we propose a fusion method to extract the building outlines under line constraints based on edge line feature extraction and building detection. The proposed fusion method is divided into the following three steps: (1) parallel grid generation; (2) building area labeling; (3) area merging.
(1) Parallel Grid Generation: For the line segments extraction results, assume that the number of lines in the primary and secondary direction is
m and
n, respectively. The original image can be simply divided into (
m + 1) * (
n + 1) parallel grids by all the edge segments. However, the grids are too small to cause the outline extraction overly to depend on the building detection results. Therefore, not only the edge segments but also the potential building corners are used for parallel grid generation in our method. As is shown in
Figure 5, the green dot is a potential building corner as a start point of parallel grid searching.
Figure 5 shows four cases to construct a parallel grid by searching along the primary and secondary direction:
Search only one point: two potential corners in the diagonal of the primary and secondary direction
Search two points: three potential corners in the primary and secondary direction
Search one point and one edge segment: two potential corners and one opposite side
Search two edge segments: one potential corner and two opposite sides
Following our searching criteria, the image is divided into nonoverlapping parallel grids, and the edge segments are preserved completely to solve the excessive segmentation.
(2) Building Area Labelling: After the parallel grid generation, every grid needs to be labelled by the building detection results. The labelling results are computed by the total pixel number of each grid
Pa and the building pixel number of each grid
Pb. When
Pb/
Pa >
T4, the whole grid is labelled building area, as shown in
Figure 6.
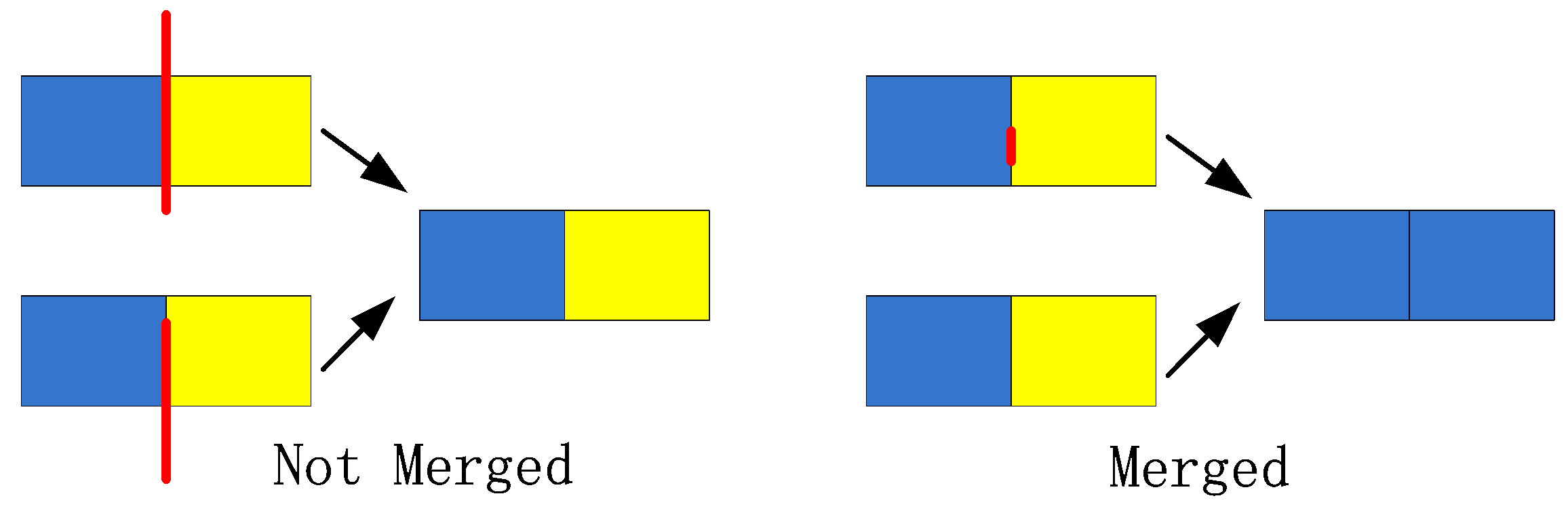
(3) Area Merging: Although the excessive segmentation problem of parallel grids is considered, there are still two adjacent grids belonging to the same building. As is shown in
Figure 7, blue grid and yellow grid represent two adjacent grids and red lines are the edge segments extracted in the previous step. The length of the edge segment is
l and the length of the grid edge is
l’. When there is one extracted edge segment between two adjacent grids and
l >
l’/2, the two adjacent grids cannot be merged; when there is no extracted edge segment or
l ≤
l’/2, the two adjacent grids should be merged.
4. Edge Constraint and Outline Compensation Dense Matching Method
The dense matching of building objects in urban areas is a great challenge. The area-based dense matching methods are all almost based on the continuous disparity assumption in the matching window. However, for building objects in urban areas, the elevation information is mutated from the building height to zero, and the terrain is discontinuous, which lead to obvious matching errors at the elevation discontinuity of building edges. In the paper, we proposed the edge constraint dense matching method by using the improved edge line feature extraction, which can provide more accurate matching search range to decrease the matching errors. Moreover, making use of the accurate outlines, outline compensation matching method is proposed to improve the disparity map for keeping the building structural attribute with parallel or vertical edges.
4.1. Edge Constraint Dense Matching Method
For stereoscopic image pairs, dense matching method is carried out on the epipolar image by epipolar constraint, which can make the matching search range reduce from two dimensions to one dimension. In addition to reducing the matching complexity, it also greatly increases the accuracy of matching. However, for building objects in urban areas, the epipolar constraint is not enough to decrease matching errors at the elevation discontinuity of building edges. In the paper, edge constraint dense matching method is proposed to solve the problem of the poor matching accuracy at the building edges, which can use the edge line features to guide the matching search scope and matching template window.
4.1.1. The Optimization of Matching Search Scope
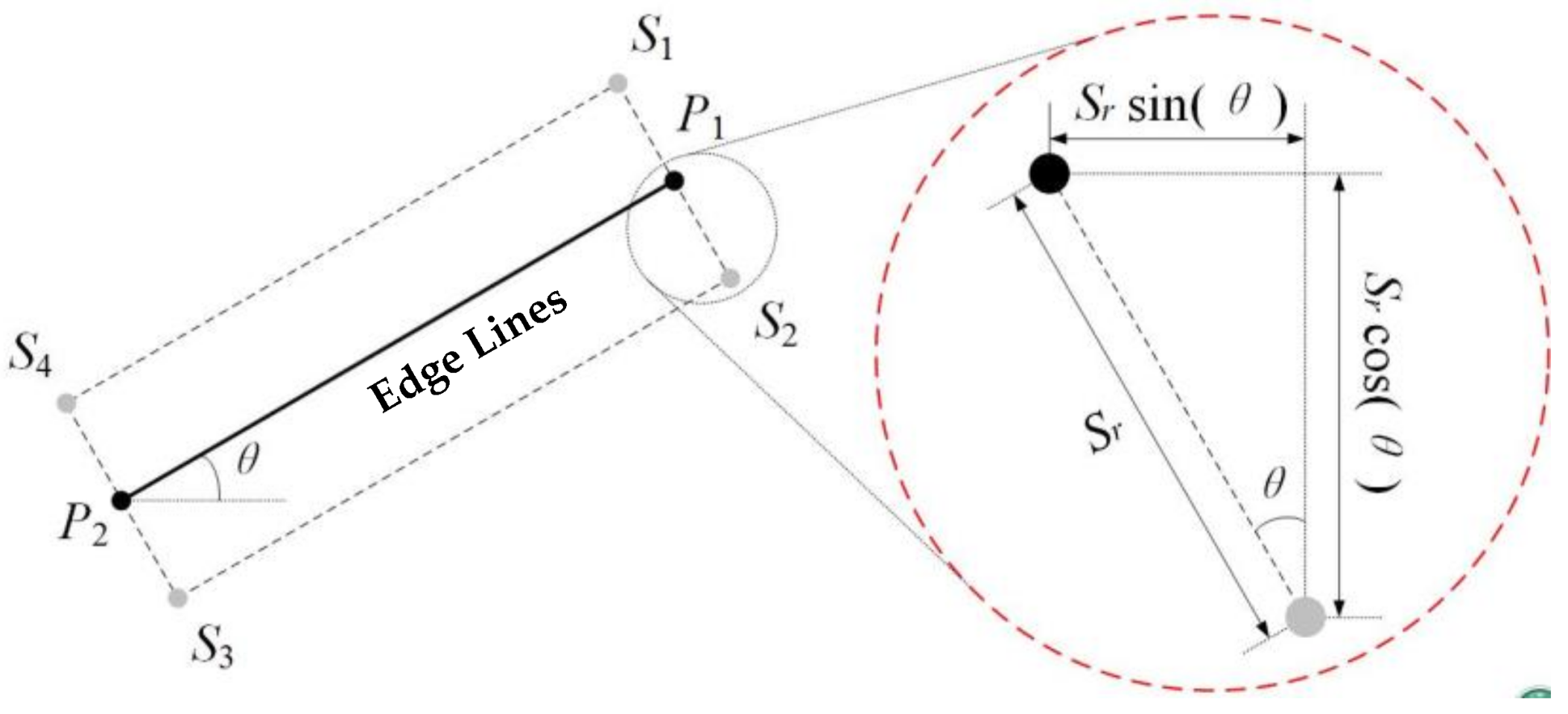
For the high-precision dense matching at the building edges, the edge lines are first matched to build the constraint relationship of corresponding matching points. After the edge line extraction by our method, a template window is established for each edge line, as shown in
Figure 8. The template window of each edge line is designed to cover the whole edge. Because the width of edge line is only one pixel, a few pixels need be added across the edge line for the template window. By determining the width
Sr, which is defaulted as 5, the template window can be generated. In
Figure 8, the points
P1 and
P2 are endpoints of the edge line and the points
Si (
i = 1, 2, 3, 4) are vertexes of the rectangular template window. The details of the part in the small circle are magnified in the red dashed circle on the right to make the clearer explanation. Similar to point matching, edge lines are matched by using the similarity measure criterion. Normalized Cross Correlation (NCC) is employed in the paper.
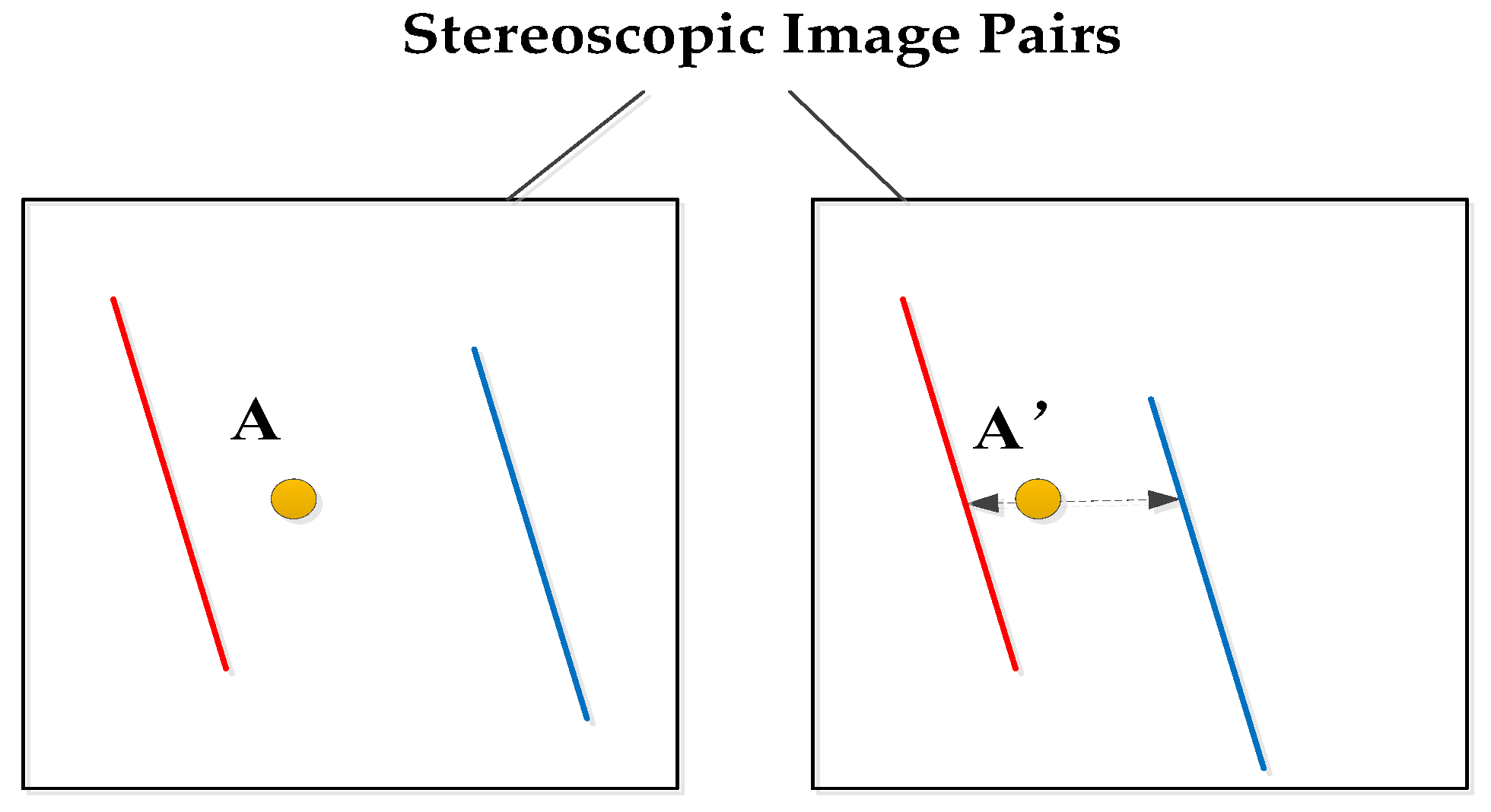
Based on the matched edge lines, the points matching search range are narrowed down. When the point is within the two parallel edge lines of buildings, the corresponding matching point is searched for in two matched parallel edge lines of the other image. It is shown in
Figure 9. The point A is between the red edge line and the blue edge line in the reference image. The matched A’ is also searched between the adjacent matched red edge line and the matched blue edge line in another image. Moreover, by the epipolar constraint, A’ is searched only on the dashed line with arrows. When the adjacent matched red line and blue line are the two edges of the same building, A’ is searched only on the roof of the building object. When the adjacent matched red line and blue line are the two edges of different buildings or lines of background, A’ is searched only on the street or other background. Our optimization of matching search scope separates the building object and the background to provide more accurate matching search range.
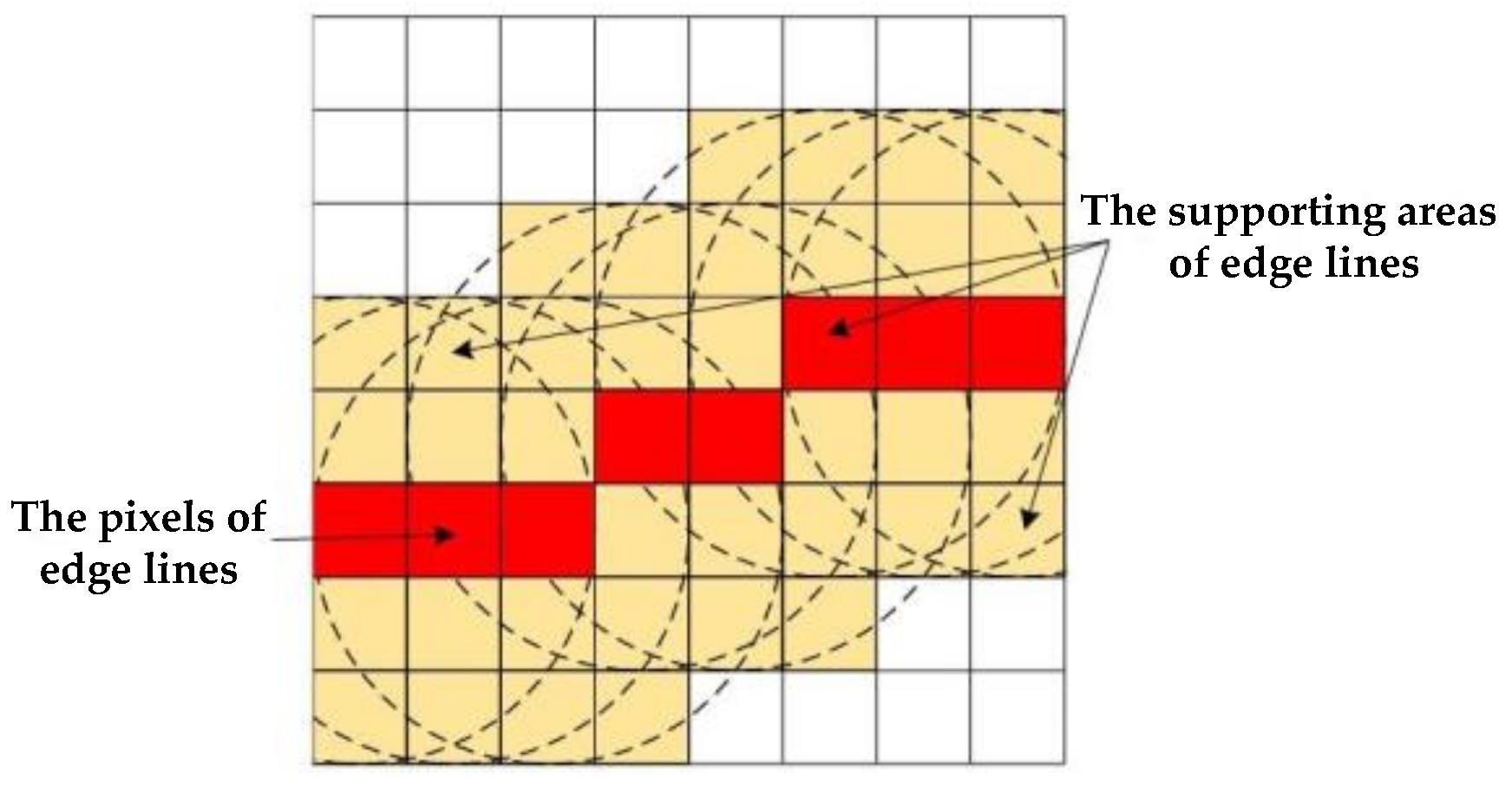
4.1.2. The Optimization of Matching Template Window
In addition to matching search scope, the size of the matching template window is another important factor of area-based dense matching method. As is well-known, a small template window can protect more detail information of high frequency, while a large template window can make more smooth information. For building objects in urban areas, the building edges obviously need be protected for detail information of high frequency to avoid matching errors. Therefore, making use of edge line extraction results, the supporting area of edge lines is matched by a small template window, and other areas (building roof, street, and other background) are matched by a large template window. The supporting area of edge lines is obtained by morphological dilation, as shown in
Figure 10. The red pixels are the edge line with one-pixel width. In addition, yellow area is the supporting area by morphological dilation of edge line. As shown in
Figure 11, a small template window is used in the white areas, while a large template window is used in the black areas. The optimization of a matching template window can decrease the matching errors at the elevation discontinuity of building edges to effectively maintain the accurate shape of building objects in the disparity map.
4.2. Outline Compensation Dense Matching Method
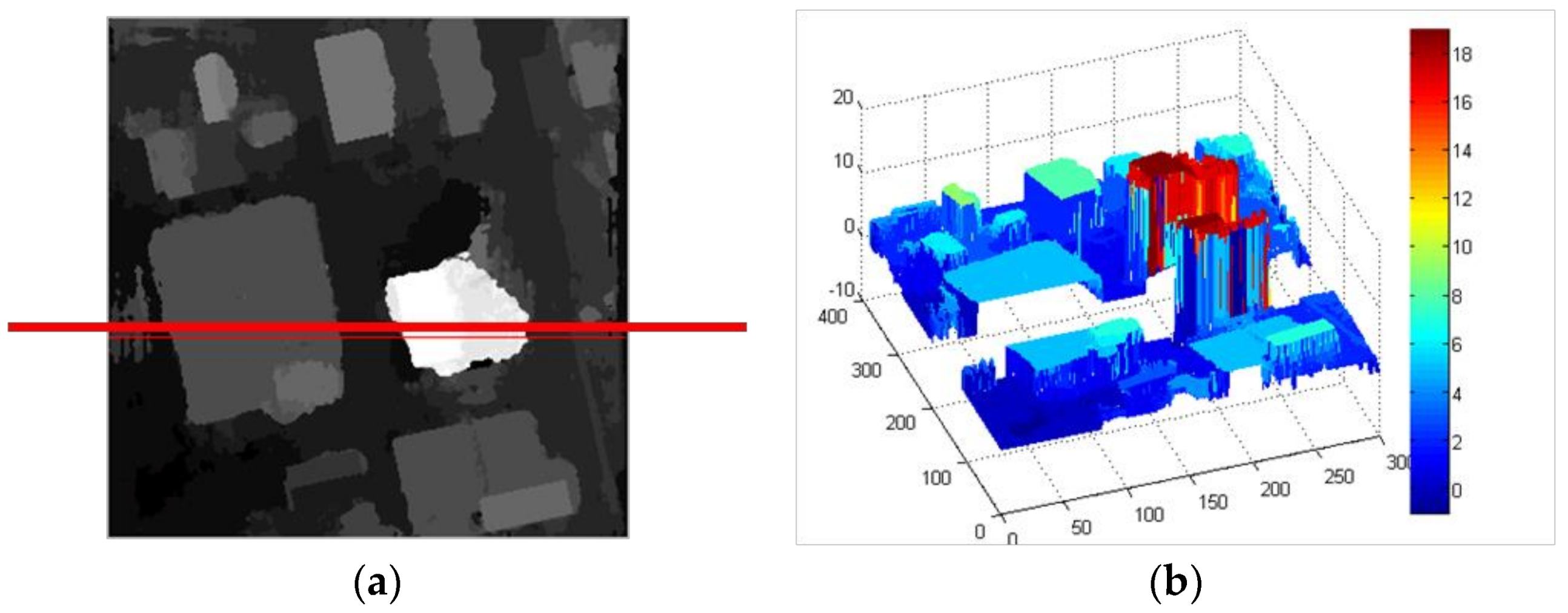
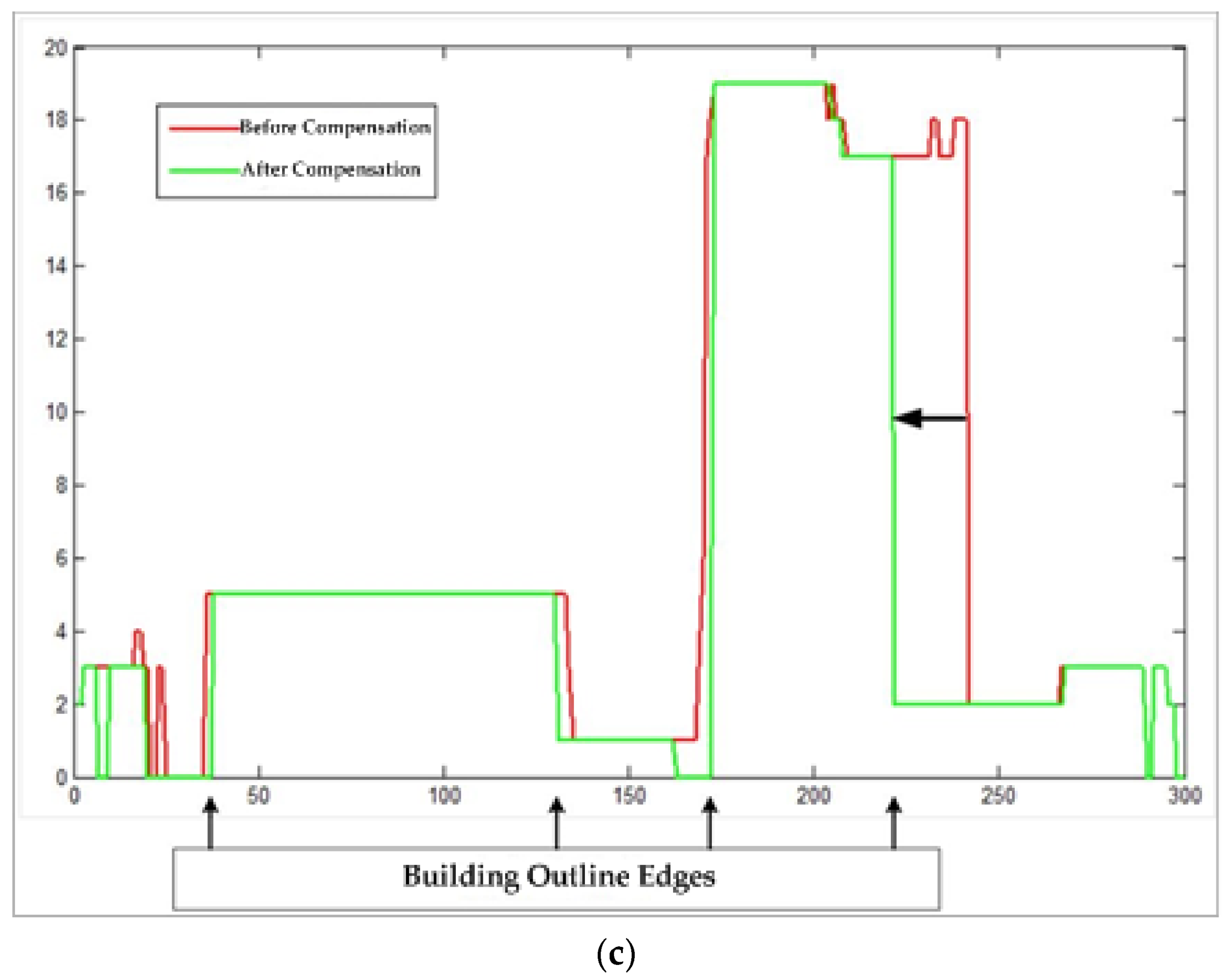
After the edge constraint, the matching errors at the building edges are greatly decreased, but the structure features of building in the disparity map cannot be obtained. The accurate outlines with building structure feature are obtained by our fusion method, which can compensate the disparity map of building objects by post-processing, as shown in
Figure 12.
Figure 12a is the disparity map after the edge constraint, and the red line represent to select any one row of the disparity map.
Figure 12b shows the 3D display of the disparity map, and it is split at the selected row. The process of outline compensation is shown in
Figure 12c. In
Figure 12c, the red curves are the profile of the 3D disparity map on the selected row, and the green curves are the profile of building outlines at the corresponding position in the 3D disparity map. Because the building outlines by our fusion method are accurate, which can keep the building structure features with parallel or vertical edges. All the building edges of the disparity map after the edge constraint are adjusted the same position with building outline extraction results. In other words, our outline compensation method makes the disparity mutation occur at building edges, which can keep the building structural attribute of the disparity the same as the building outline extraction results. It can further improve the building structural attribute of the disparity, and greatly decrease the matching errors caused by elevation discontinuities at the building edges.
6. Conclusions
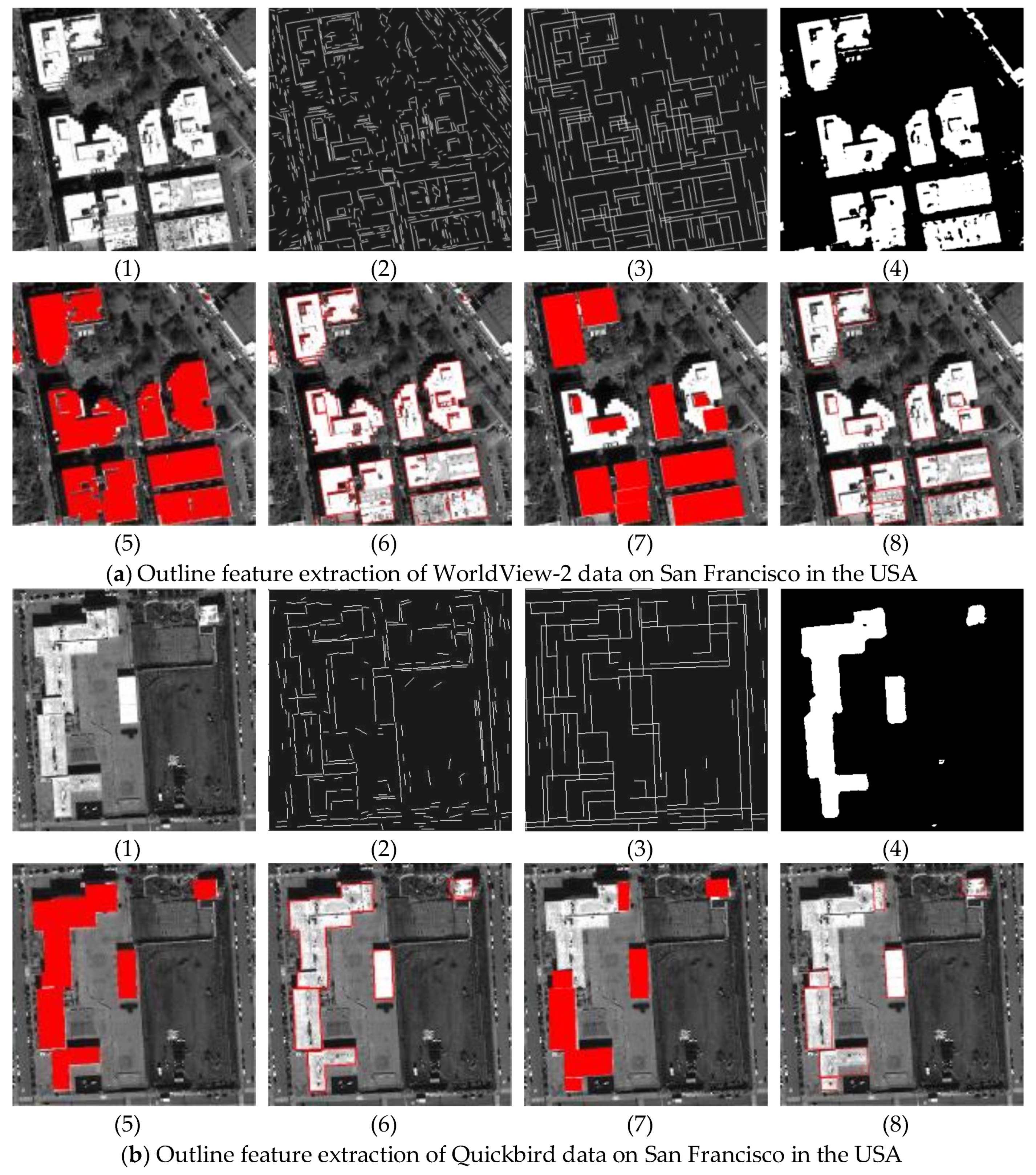
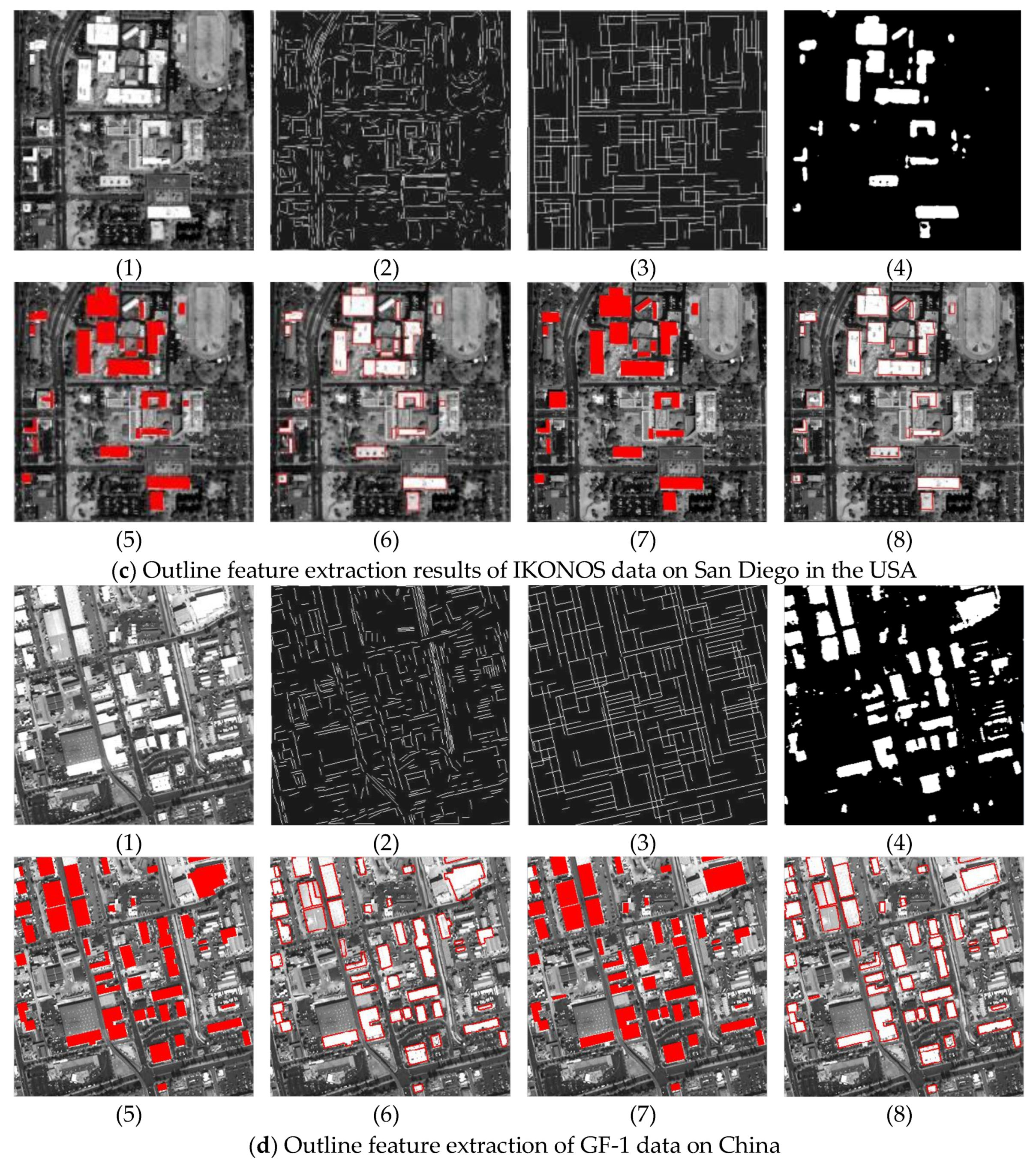
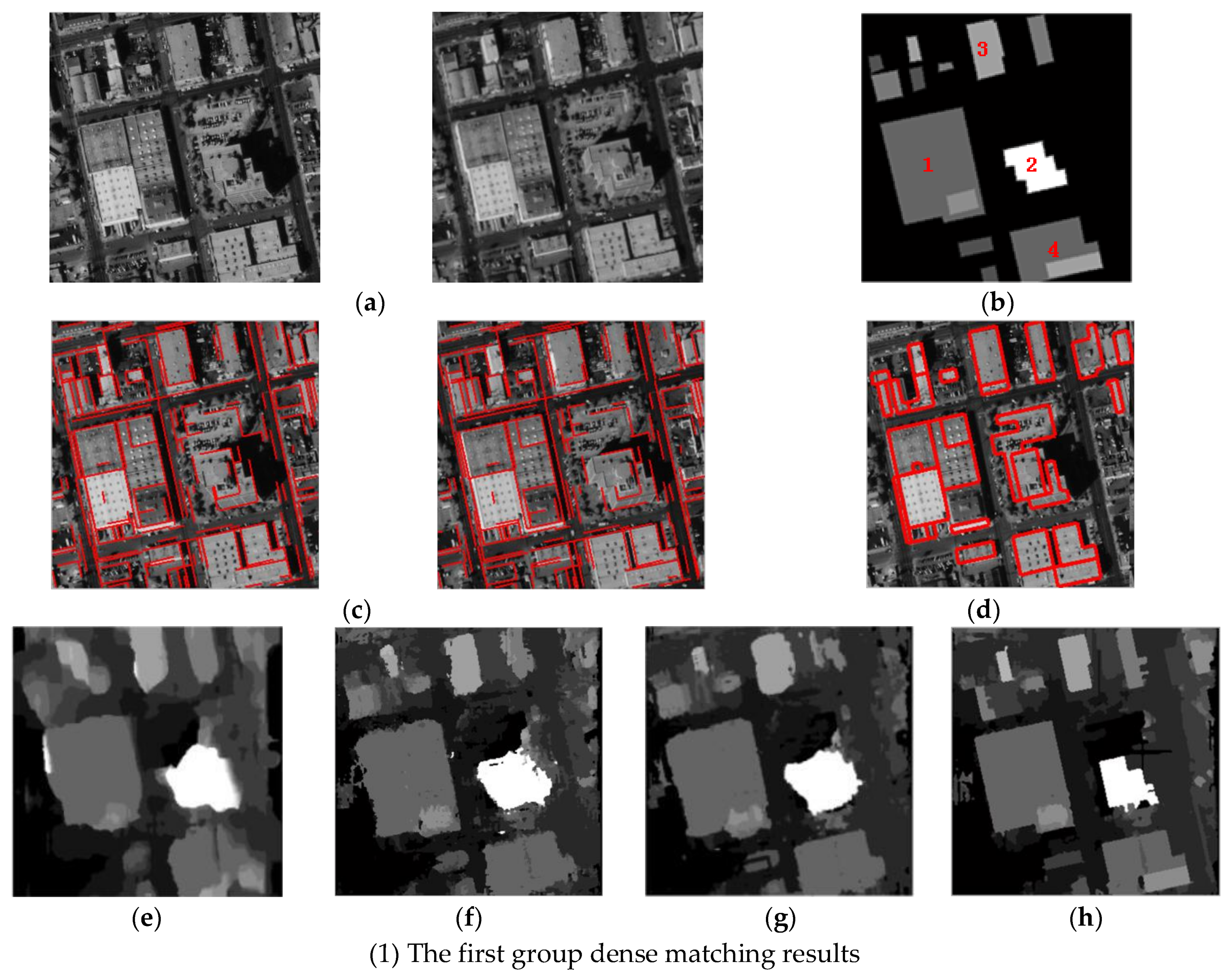
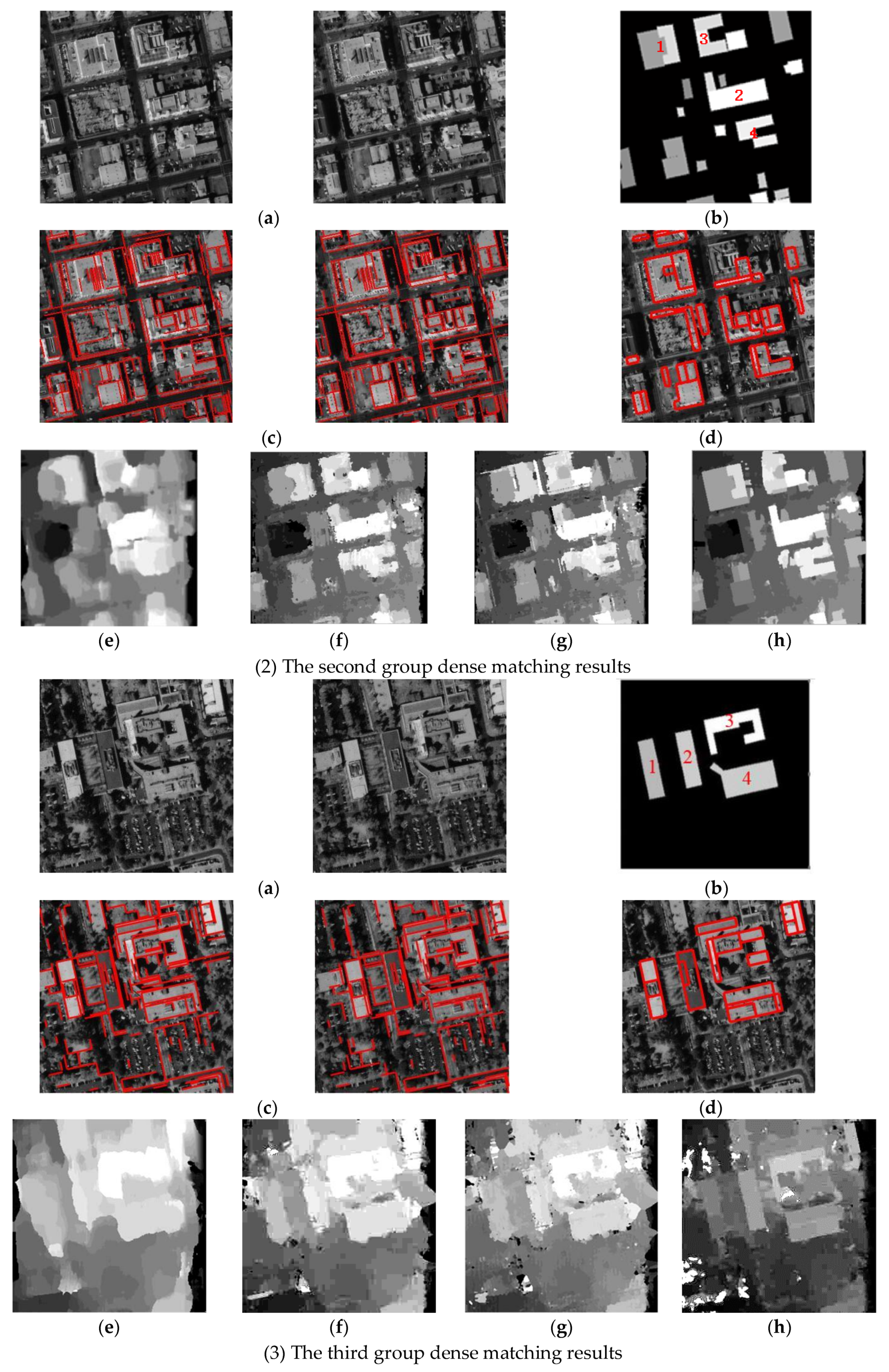
In this paper, we propose a novel edge constraint and outline compensation (ECAOC) dense matching method to obtain accurate disparity map and keeping building object structure feature. For dense matching of building objects in urban areas, the elevation information is mutated from the building height to zero, and the terrain is discontinuous, which can lead to matching errors at the elevation discontinuity of building edges. Therefore, our work fully analyzes the special terrain of building objects in urban areas, which can greatly increase matching accuracy of building objects by precise building structure feature extraction results. From the outline extraction experimental results, our fusion method obtains clear structure in high-resolution satellite panchromatic images compared with two other methods. From the dense matching experimental results, our ECOAC method proves superior for matching accuracy of building objects in urban areas compared with three other methods. The main contributions in the paper are summarized as follows:
- (1)
An improved edge line feature correction method is proposed. LSD method is employed to obtain basic line detection. Our method can correct the line segments by LSD to fit building edges closely.
- (2)
A fusion method is proposed to take advantage of the edge lines and the building areas at the same time, which use straight lines to constrain the building segmentation results for the outlines with a precise shape. Therefore, the outline feature by the proposed method can maintain the building structural attribute with parallel and perpendicular edges, which can be greatly helpful for our dense matching method.
- (3)
An edge constraint and outline compensation (ECAOC) dense matching method is proposed in the paper. The improved edge lines are used to provide more accurate matching search range, and edge line supporting areas are proposed to improve a matching template window for decreasing the matching errors at the building edges. Furthermore, the high-precision building outlines by our fusion method are used for the final shape compensation of building objects in the disparity map. Our method greatly increases the matching accuracy of building objects in urban areas, especially at the building edges, to obtain the accurate disparity map with clear building structural features.
In conclusion, our outline extraction fusion method and ECAOC dense matching method are proposed especially for dense matching of building objects in urban areas, which can obtain more accurate matching results to maintain building object structural attributes in the disparity map. The high-precision matching disparity map by our method is very helpful for the 3D reconstruction of urban areas in satellite image processing.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}