An Improved Fast Self-Calibration Method for Hybrid Inertial Navigation System under Stationary Condition

Abstract
:1. Introduction
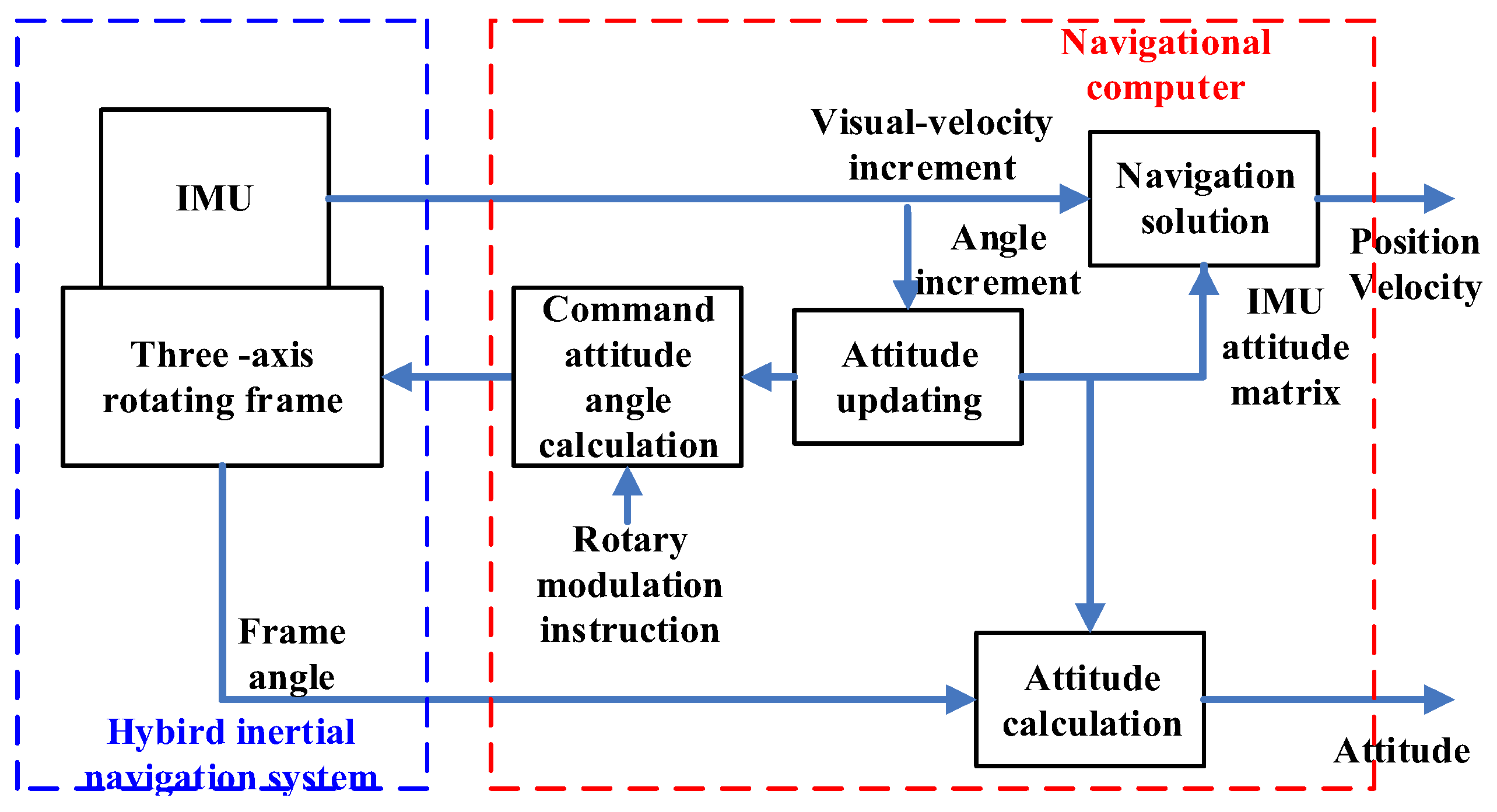
2. Improved Hybrid Inertial Self-Calibration Method
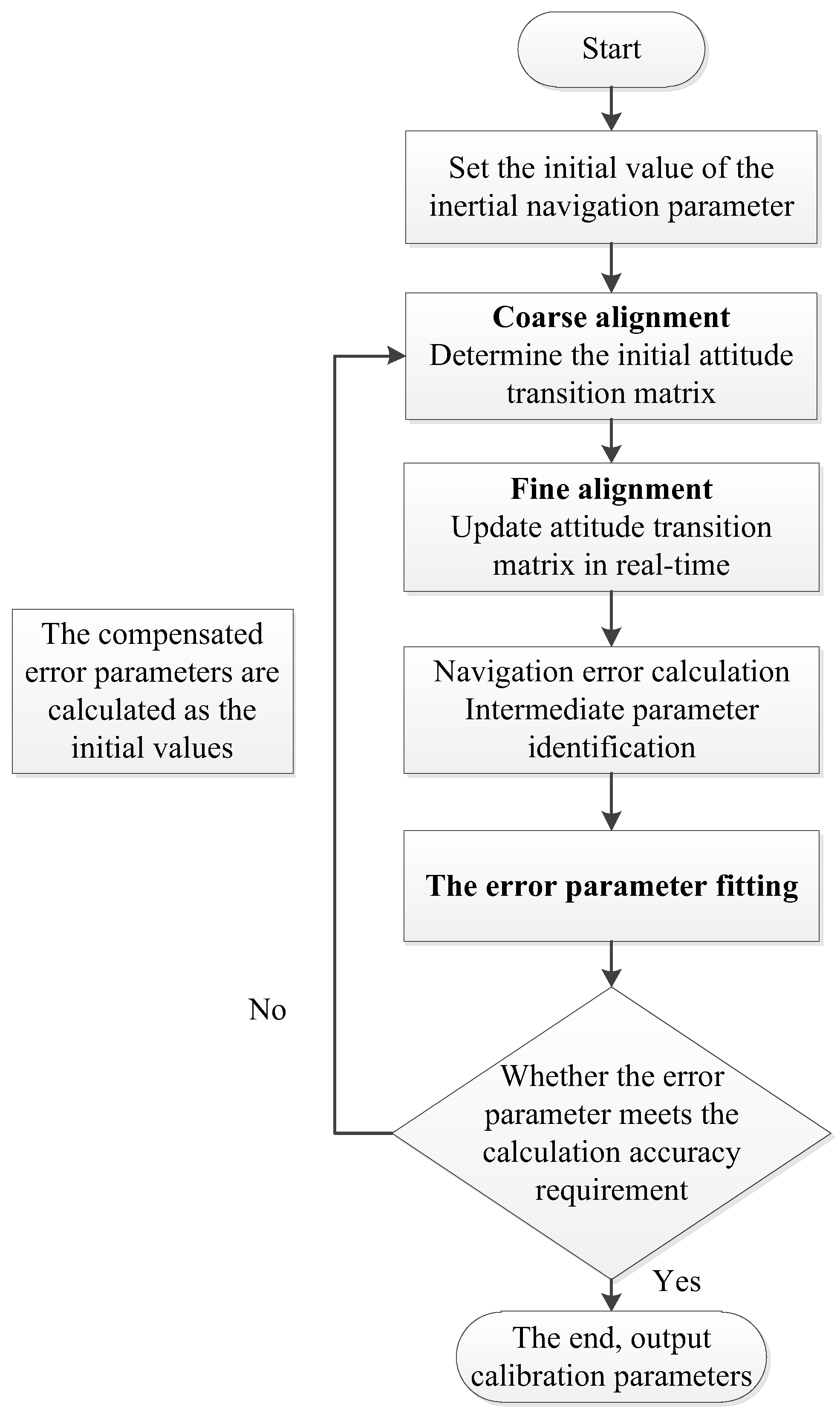
2.1. Calibration Methods and Processes
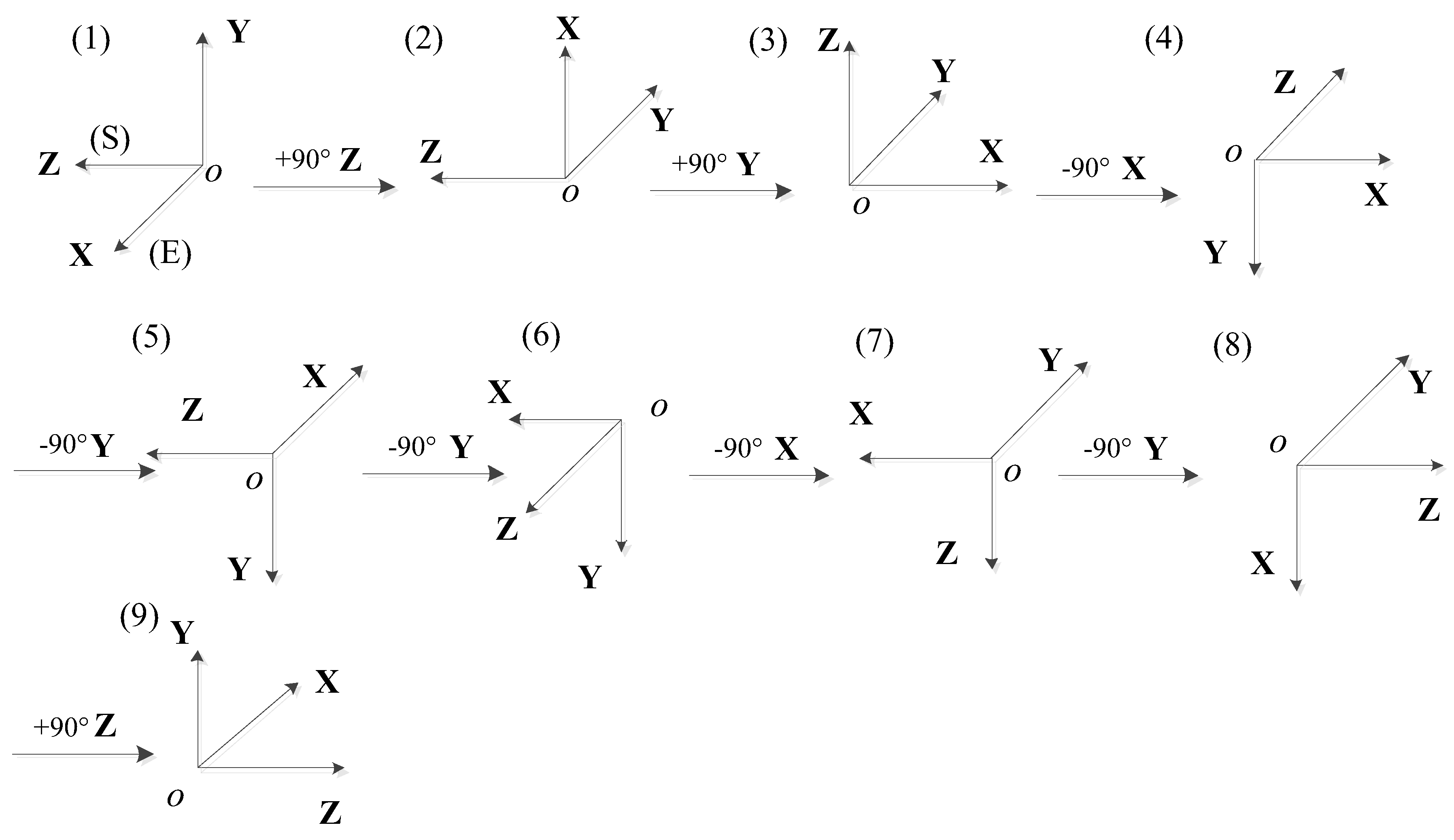
2.2. The Calibration Rotation Sequence
2.3. Fitting Method Research
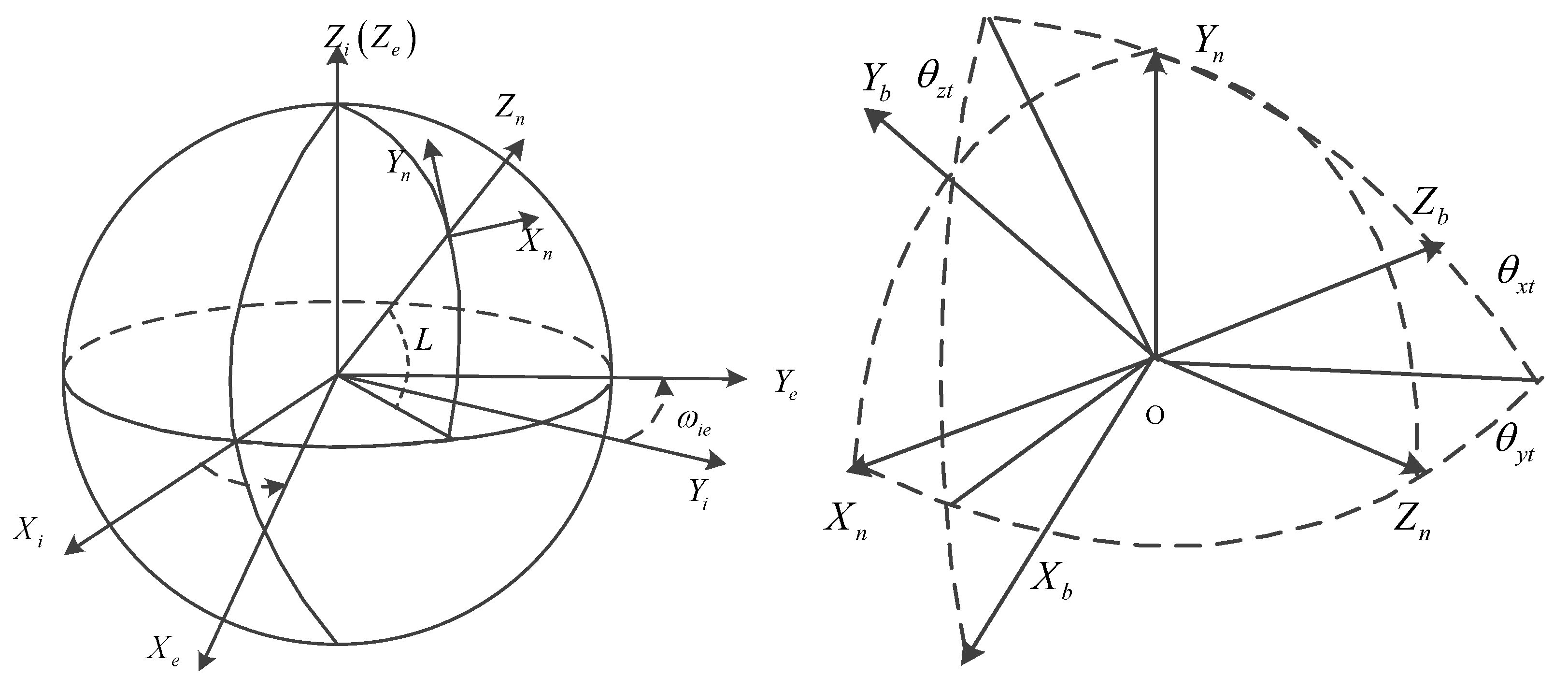
2.3.1. Inertial Navigation System Error Model
2.3.2. Systematic Error Model
2.3.3. Attitude Updated Equation
2.3.4. Intermediate Parameter Identification
2.3.5. Systematic Error Parameters Determination and Compensation
3. Mathematical Simulation
3.1. Simulation Method and Process
3.2. Simulation Results and Conclusions
4. Experimental Verification
4.1. Experimental Scheme
4.2. Experiment Data
4.3. Test Results Analysis
- (1)
- The method does not rely on the turntable accuracy; the calibration process is simple and easy to operate. The traditional calibration method relies on the high-precision turntable, that is, the calibration accuracy is greatly affected by the turntable accuracy and the calibration process and operation are complex. The proposed calibration method can be used to calibrate the inertial navigation on a marble slab.
- (2)
- All parameters can be calibrated. Many calibration methods are only efficient for specific parameters but cannot achieve full parameter calibration, whereas the proposed method can be completed for all 21 error calibration parameters.
- (3)
- The calibration time is short. With the precision of the traditional 19-position calibration method, the proposed self-calibration method reduces the calibration time from 70 min to 30 min and the calibration speed is fast.
5. Conclusions and Outlook
Author Contributions
Conflicts of Interest
References
- David, T.; John, W. Strapdown Inertial Navigation Technology. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 33–34. [Google Scholar]
- Xu, Y.F.; Zhang, S.F. Calibration for gimbaled platform inertial navigation system on centrifuge. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017. [Google Scholar] [CrossRef]
- Wang, X.-L.; Guo, L.-H. An intelligentized and fast cali-bration method of SINS on moving base for planed mis-siles. Aerosp. Sci. Technol. 2009, 13, 216–223. [Google Scholar] [CrossRef]
- Zhang, H.-L.; Wu, Y.-X.; Wu, W.-Q.; Wu, M.; Hu, X. Improved multi-position calibration for inertial measurement units. Meas. Sci. Technol. 2010, 21, 1–11. [Google Scholar] [CrossRef]
- Barbour, N.M.; Gibson, C. Demonstrating Practical Inertial Navigation: The Beginnings and Beyond. In Proceedings of the AIAA Guidance, Navigation, and Control, Boston, MA, USA, 19–22 August 2013; pp. 717–722. [Google Scholar]
- Jwo, D.J.; Shih, J.H.; Hsu, C.S.; Yu, K.-L. Development of a strapdown inertial navigation system simulation platform. J. Mar. Sci. Technol. 2014, 22, 381–391. [Google Scholar]
- Ji, Z.-N.; Liu, C.; Cai, S.-J.; Xu, H.G.; Zhou, Z.H. Improved sixteen-sequence rotation scheme for dual-axis SINS. J. Chin. Inert. Technol. 2013, 21, 46–50. [Google Scholar]
- Li, J.; Zhao, J.; Sha, X.; Li, F. The rotation modulation inertial navigation system for blackout area during hypersonic reentry. In Proceedings of the International Symposium on Optoelectronic Technology and Application, International Society for Optics and Photonics, Beijing, China, 25 October 2016; p. 1015813. [Google Scholar]
- Feng, P.-D. On hybrid inertial navigation systems. J. Chin. Inert. Technol. 2016, 24, 281–284. [Google Scholar]
- Cheng, J.-C.; Fang, J.-C.; Wu, W.-R.; Wang, W.-J. Integrated calibration method for RLG IMU. J. Chin. Inert. Technol. 2014, 22, 445–452. [Google Scholar]
- Li, J.; Fang, J.; Ge, S. Kinetics and design of a mechanically dithered ring laser gyroscope position and orientation sys-tem. IEEE Trans. Instrum. Meas. 2013, 62, 210–220. [Google Scholar] [CrossRef]
- Jorgensen, M.J.; Paccaagnan, D.; Poulsen, N.K.; Larsen, M.B. IMU Calibration and Validation in a Factory, Remote on land and at sea. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 3117–3125. [Google Scholar]
- Wang, L.; Wang, W.; Zhang, Q.; Gao, P. Self-calibration method based on navigation in high-precision inertial navigation system with fiber optic gyro. Opt. Eng. 2014, 53, 064103. [Google Scholar] [CrossRef]
- Rogers, R.M. Applied Mathematics in Integrated Navigation Systems. In Applied Mathematics in Integrated Navigation Systems; Reston American Institute of Aeronautics & Astronautics Inc.: Reston, VA, USA, 2007; Volume 1, p. 78. [Google Scholar]
- Emel’yantsev, G.I.; Blazhnov, B.A.; Dranitsyna, E.V.; Stepanov, A.P. Calibration of a precision SINS IMU and construction of IMU-bound orthogonal frame. Gyroscopy Navig. 2016, 7, 205–213. [Google Scholar] [CrossRef]
- Zheng, Z.; Han, S.; Zheng, K. An eight-position self-calibration method for a dual-axis rotational Inertial Navigation System. Sens. Actuators A Phys. 2015, 232, 39–48. [Google Scholar] [CrossRef]
- Li, K.; Chen, Y.; Wang, L. A self-calibration method in single-axis rotational inertial navigation system with rotating mechanism. In Proceedings of the Space Optics and Earth Imaging and Space Navigation, Beijing, China, 24 October 2017; p. 12. [Google Scholar]
- Xiang, G.; Qiu, F.; Miao, J.; Duan, R. A self-calibration method based on one-time electrification before launching for Inertial Navigation System. In Proceedings of the IEEE Guidance, Navigation and Control Conference, Nanjing, China, 12–14 August 2017; pp. 1138–1143. [Google Scholar]
- Hu, P.; Xu, P.; Chen, B.; Wu, Q. A Self-Calibration Method for the Installation Errors of Rotation Axes based on the Asynchronous Rotation of Rotational Inertial Navigation Systems. IEEE Trans. Ind. Electron. 2017, PP, 1. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, L.; Li, K.; Gao, J. A compensation method of lever arm effect for tri-axis hybrid inertial navigation system based on fiber optic gyro. Meas. Sci. Technol. 2017, 28, 055103. [Google Scholar] [CrossRef]
- Gao, P.; Li, K.; Wang, L.; Liu, Z. A Self-Calibration Method for Accelerometer Nonlinearity Errors in Triaxis Rotational Inertial Navigation System. IEEE Trans. Instrum. Meas. 2017, PP, 1–11. [Google Scholar] [CrossRef]
- Gao, P.; Li, K.; Song, T.; Liu, Z. An Accelerometers Size Effect Self-calibration Method for Tri-axis Rotational Inertial Navigation System. IEEE Trans. Ind. Electron. 2017, PP, 1. [Google Scholar]
- Gao, P.; Li, K.; Wang, L.; Liu, Z. A Self-Calibration Method for Non-Orthogonal Angles of Gimbals in Tri-Axis Rotational Inertial Navigation System. IEEE Sens. J. 2016, 16, 8998–9005. [Google Scholar] [CrossRef]
- Song, T.; Li, K.; Sui, J.; Liu, Z.; Liu, J. Self-calibration method of inner lever-arm parameters for tri-axis RINS. Meas. Sci. Technol. 2017, 28, 115105. [Google Scholar] [CrossRef]
- Gao, P.; Li, K.; Wang, L.; Liu, Z. A self-calibration method for tri-axis rotational inertial navigation system. Meas. Sci. Technol. 2016, 27, 115009. [Google Scholar] [CrossRef]
- Cai, Q.; Yang, G.; Song, N.; Liu, Y. Systematic Calibration for Ultra-High Accuracy Inertial Measurement Units. Sensors 2016, 16, 940. [Google Scholar] [CrossRef] [PubMed]
- Weng, H.N.; Gong, J.; Hu, X.M.; Gao, F.; Zhang, Y.F.; Tianjin Navigation Instrument Research Institute. Online self-calibration of hybrid FOG inertial navigation system. J. Chin. Inert. Technol. 2017, 1, 1–5. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | Pre-Rotation Attitude | Rotation Angle Rotation Axis | Post-Rotation Attitude | ||||
|---|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | ||
| 1 | east | up | south | +90° Z | up | west | south |
| 2 | up | west | south | +90° Y | north | west | up |
| 3 | north | west | up | −90° X | north | down | west |
| 4 | north | down | west | −90° Y | west | down | south |
| 5 | west | down | south | −90° Y | south | down | east |
| 6 | south | down | east | −90° X | south | west | down |
| 7 | south | west | down | −90° Y | down | west | north |
| 8 | down | west | north | +90° Z | west | up | north |
| 9 | west | up | north | ||||
| Parameter | Unit | Standard Values | Simulation Results | Precision | ||
|---|---|---|---|---|---|---|
| Gyros parameter repeatability | Scale factor | Wgxx | ppm | 50 | 50.67212 | 0.67212 |
| Wgyy | ppm | 50 | 50.93523 | 0.93523 | ||
| Wgzz | ppm | 50 | 49.43174 | −0.56826 | ||
| Zero-drift | D0x | deg/h | 3 | 3.00339 | 0.00339 | |
| D0y | deg/h | 3 | 2.99594 | −0.00406 | ||
| D0z | deg/h | 3 | 3.00177 | 0.00177 | ||
| Installation error | Wgyx | arcsec | 100 | 107.3 | 7.3 | |
| Wgzx | arcsec | 100 | 102.7 | 2.7 | ||
| Wgxy | arcsec | 100 | 98.8 | −1.2 | ||
| Wgzy | arcsec | 100 | 103.4 | 3.4 | ||
| Wgxz | arcsec | 100 | 106.6 | 6.6 | ||
| Wgyz | arcsec | 100 | 95.3 | −4.7 | ||
| Accelerometer parameter repeatability | Scale factor | Kaxx | ppm | 30 | 30.75625 | 0.75625 |
| Kayy | ppm | 30 | 29.53734 | −0.46266 | ||
| Kazz | ppm | 30 | 30.12328 | 0.12328 | ||
| Zero bias | E0x | mg | 3 | 3.00000614 | 6.14 × 10−6 | |
| E0y | mg | 3 | 2.99999663 | −3.37 × 10−6 | ||
| E0z | mg | 3 | 3.00000703 | 7.03 × 10−6 | ||
| Installation error | Kazy | arcsec | 50 | 53.6 | 3.6 | |
| Kaxz | arcsec | 50 | 55.2 | 5.2 | ||
| Kayz | arcsec | 50 | 48.9 | 1.1 | ||
| Parameters | Unit | Group One | Group Two | Group Three | 19-Position Calibration Method | Precision (Maximum Error) | ||
|---|---|---|---|---|---|---|---|---|
| Gyros parameter repeatability | Scale factor | Wgxx | ppm | 50.60408 | 50.76921 | 50.25512 | 50.14445 | 0.62476 |
| Wgyy | ppm | 50.52607 | 50.42275 | 50.37525 | 50.38612 | 0.13995 | ||
| Wgzz | ppm | 50.65360 | 50.19866 | 50.26931 | 50.75971 | 0.56105 | ||
| Zero-drift | D0x | deg/h | −0.02387 | −0.02651 | −0.02492 | −0.02777 | 0.0039 | |
| D0y | deg/h | 0.02557 | 0.01898 | 0.02422 | 0.02694 | −0.00796 | ||
| D0z | deg/h | −0.18155 | −0.17613 | −0.17447 | −0.18129 | 0.00682 | ||
| Installation error | Wgyx | arcsec | 401.3 | 396.3 | 397.6 | 398.7 | 2.6 | |
| Wgzx | arcsec | −112.3 | −113.8 | −115.1 | −112.0 | −3.1 | ||
| Wgxy | arcsec | −80.6 | −78.8 | −78.3 | −80.4 | 2.1 | ||
| Wgzy | arcsec | −85.5 | −89.7 | −90.0 | −85.7 | −4.3 | ||
| Wgxz | arcsec | 431.0 | 427.5 | 427.0 | 431.4 | −4.4 | ||
| Wgyz | arcsec | −299.8 | −297.1 | −296.7 | −300.6 | 3.9 | ||
| Accelerometer parameter repeatability | Scale factor | Kaxx | ppm | 30.14844 | 30.74637 | 30.39429 | 30.31055 | 0.43582 |
| Kayy | ppm | 30.50457 | 30.47523 | 30.68148 | 30.52441 | 0.15707 | ||
| Kazz | ppm | 30.65408 | 30.30229 | 30.42456 | 30.61169 | 0.3094 | ||
| Zero bias | E0x | g | −0.0006743 | −0.0006744 | −0.0006698 | −0.0006772 | 7.40 × 10−6 | |
| E0y | g | 0.0005472 | 0.0005463 | 0.0005476 | 0.0005468 | 8.00 × 10−7 | ||
| E0z | g | 0.0007217 | 0.0007246 | 0.0007217 | 0.0007239 | −2.20 × 10−6 | ||
| Installation error | Kazy | arcsec | −7.5 | −9.6 | −9.0 | −7.1 | 2.5 | |
| Kaxz | arcsec | 98.4 | 97.2 | 97.3 | 98.4 | −1.2 | ||
| Kayz | arcsec | 35.0 | 39.9 | 38.5 | 36.7 | 3.2 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Wei, S.; Su, G.; Wang, J.; Lu, J. An Improved Fast Self-Calibration Method for Hybrid Inertial Navigation System under Stationary Condition. Sensors 2018, 18, 1303. https://doi.org/10.3390/s18051303
Liu B, Wei S, Su G, Wang J, Lu J. An Improved Fast Self-Calibration Method for Hybrid Inertial Navigation System under Stationary Condition. Sensors. 2018; 18(5):1303. https://doi.org/10.3390/s18051303
Chicago/Turabian StyleLiu, Bingqi, Shihui Wei, Guohua Su, Jiping Wang, and Jiazhen Lu. 2018. "An Improved Fast Self-Calibration Method for Hybrid Inertial Navigation System under Stationary Condition" Sensors 18, no. 5: 1303. https://doi.org/10.3390/s18051303
APA StyleLiu, B., Wei, S., Su, G., Wang, J., & Lu, J. (2018). An Improved Fast Self-Calibration Method for Hybrid Inertial Navigation System under Stationary Condition. Sensors, 18(5), 1303. https://doi.org/10.3390/s18051303