Development of PZT Actuated Valveless Micropump



 and
and 
Abstract
:1. Introduction
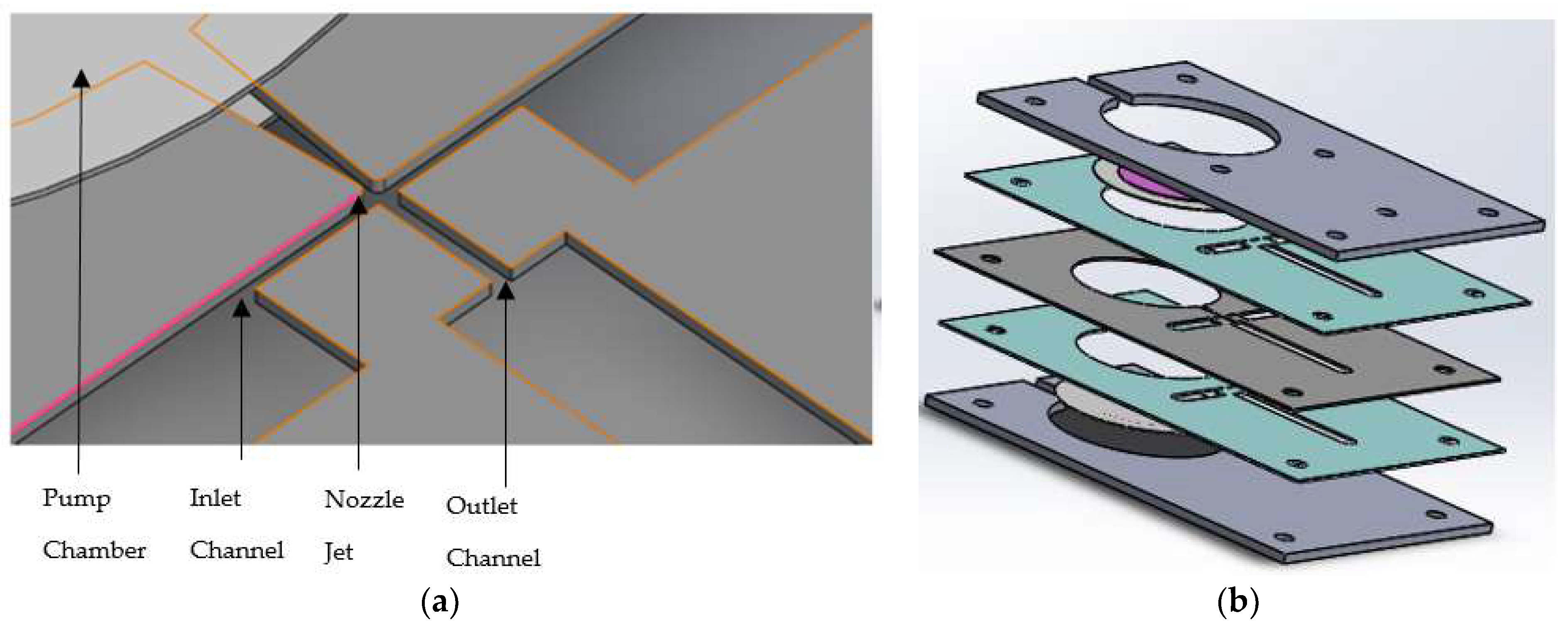
2. Proposed Design and Working Principle of Micropump
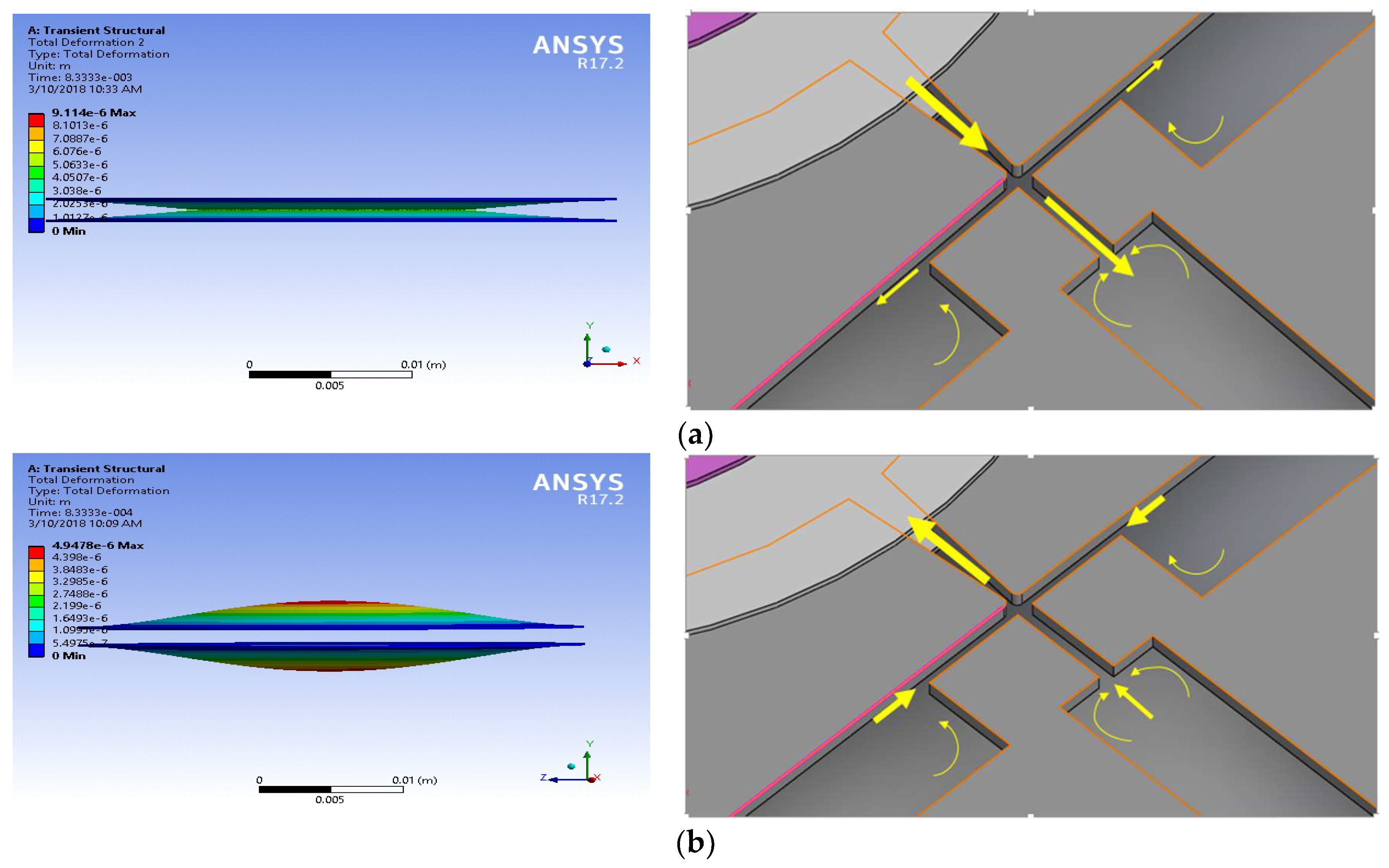
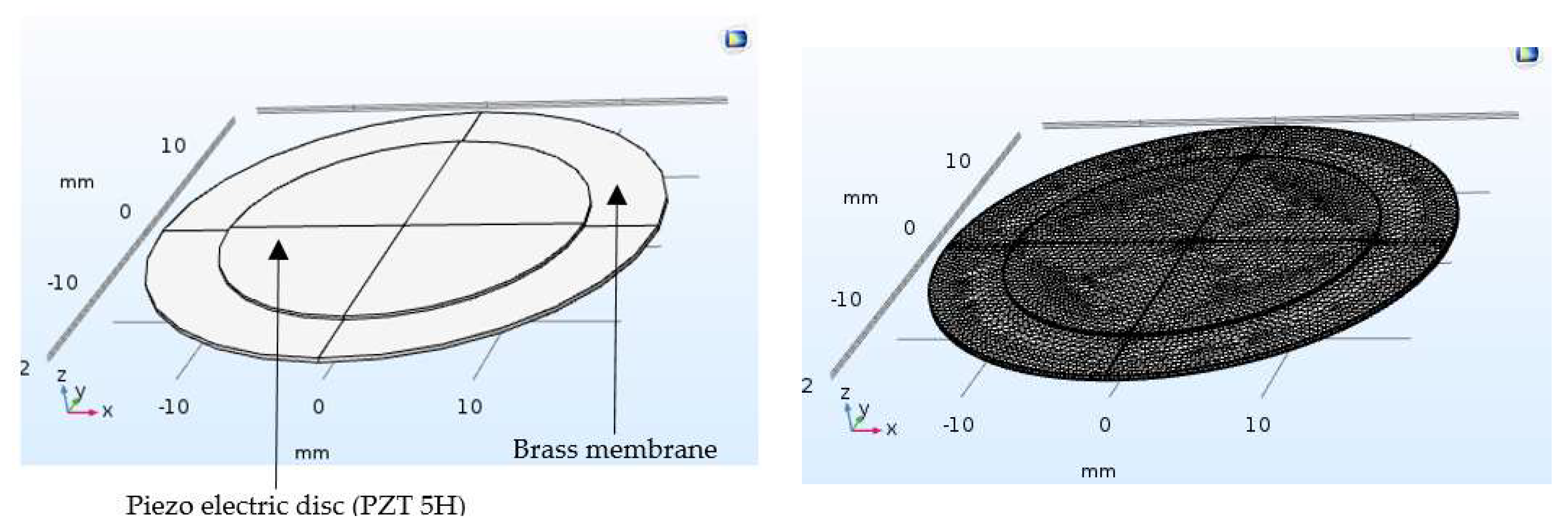
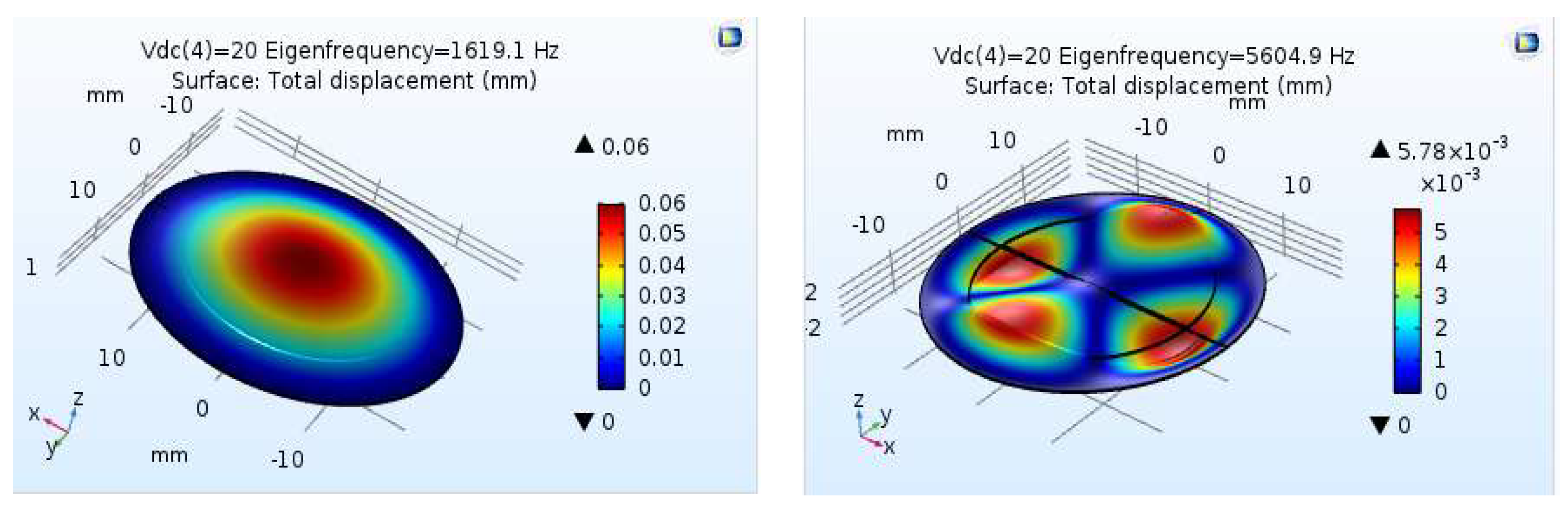
3. Design and Simulation of Micropump
4. Fabrication of Micropump
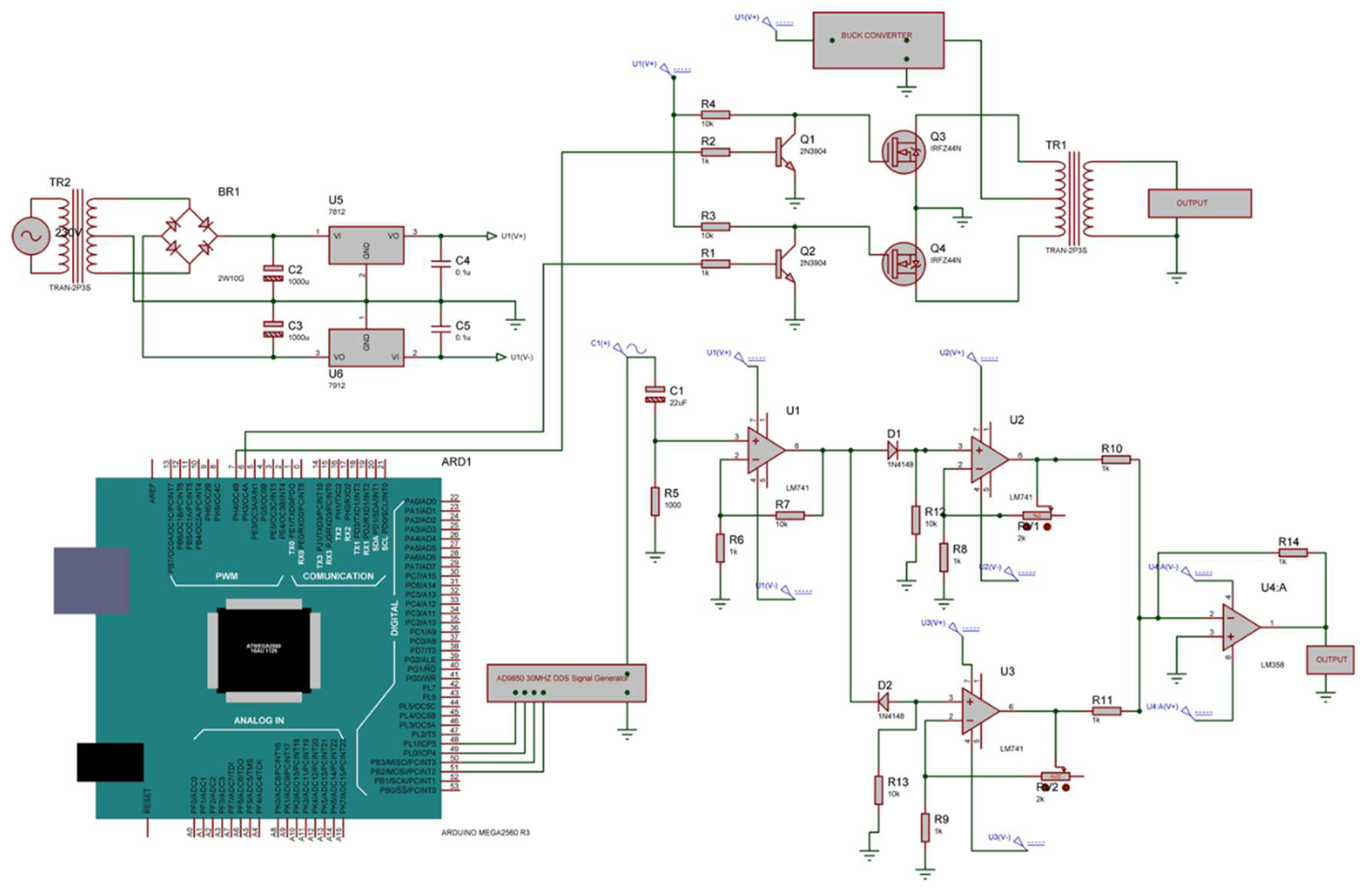
5. Signal Conditioning Circuit Design
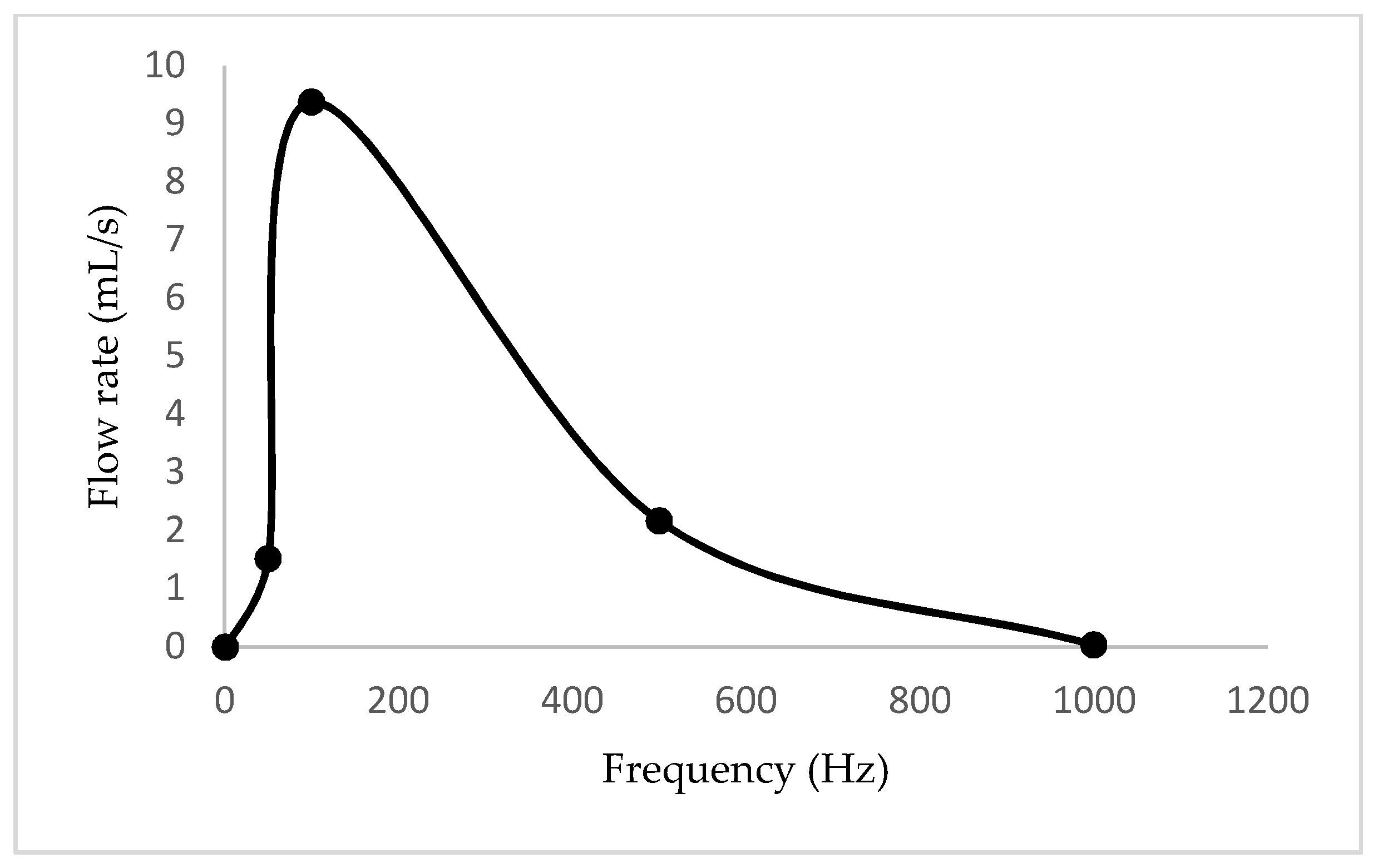
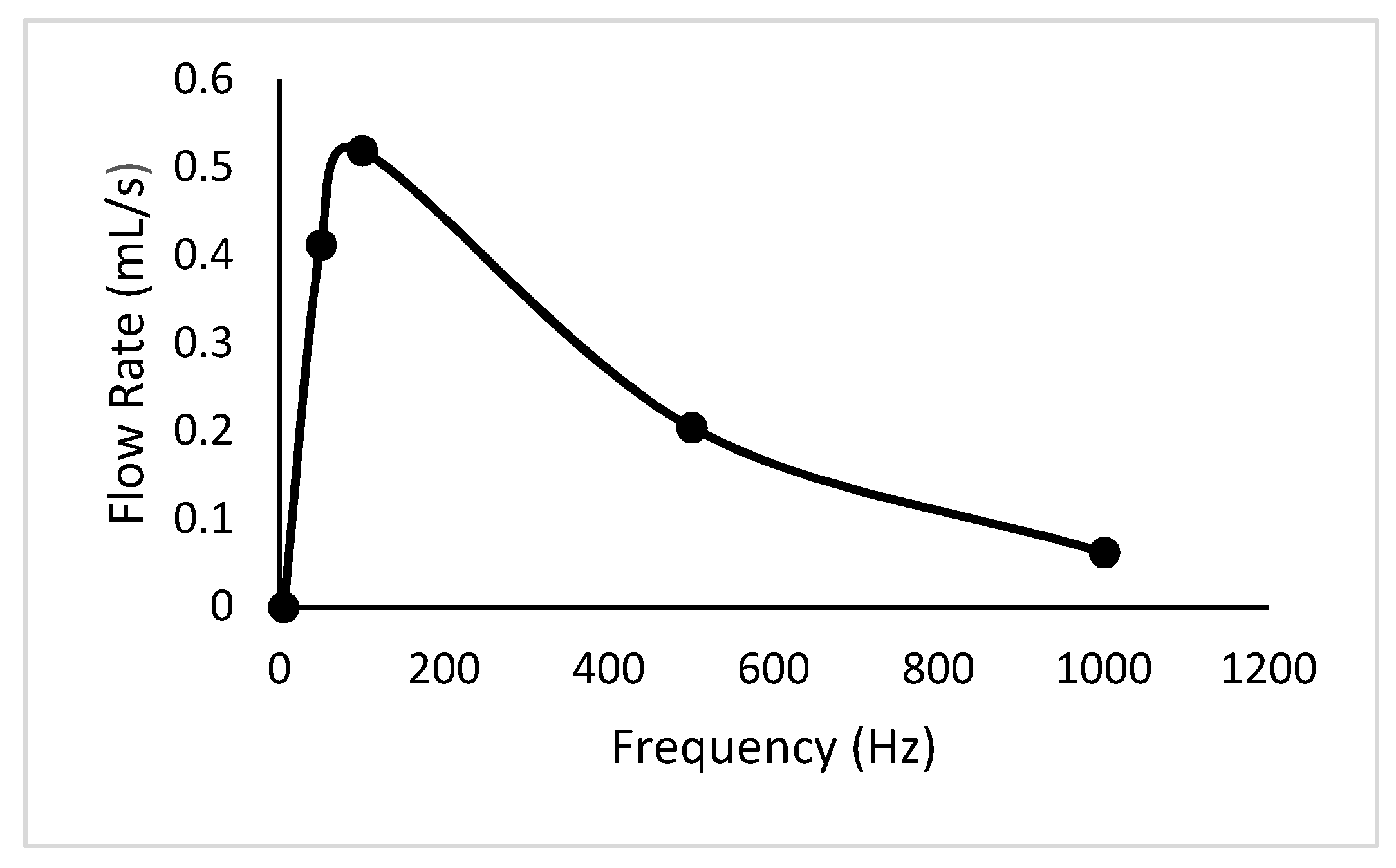
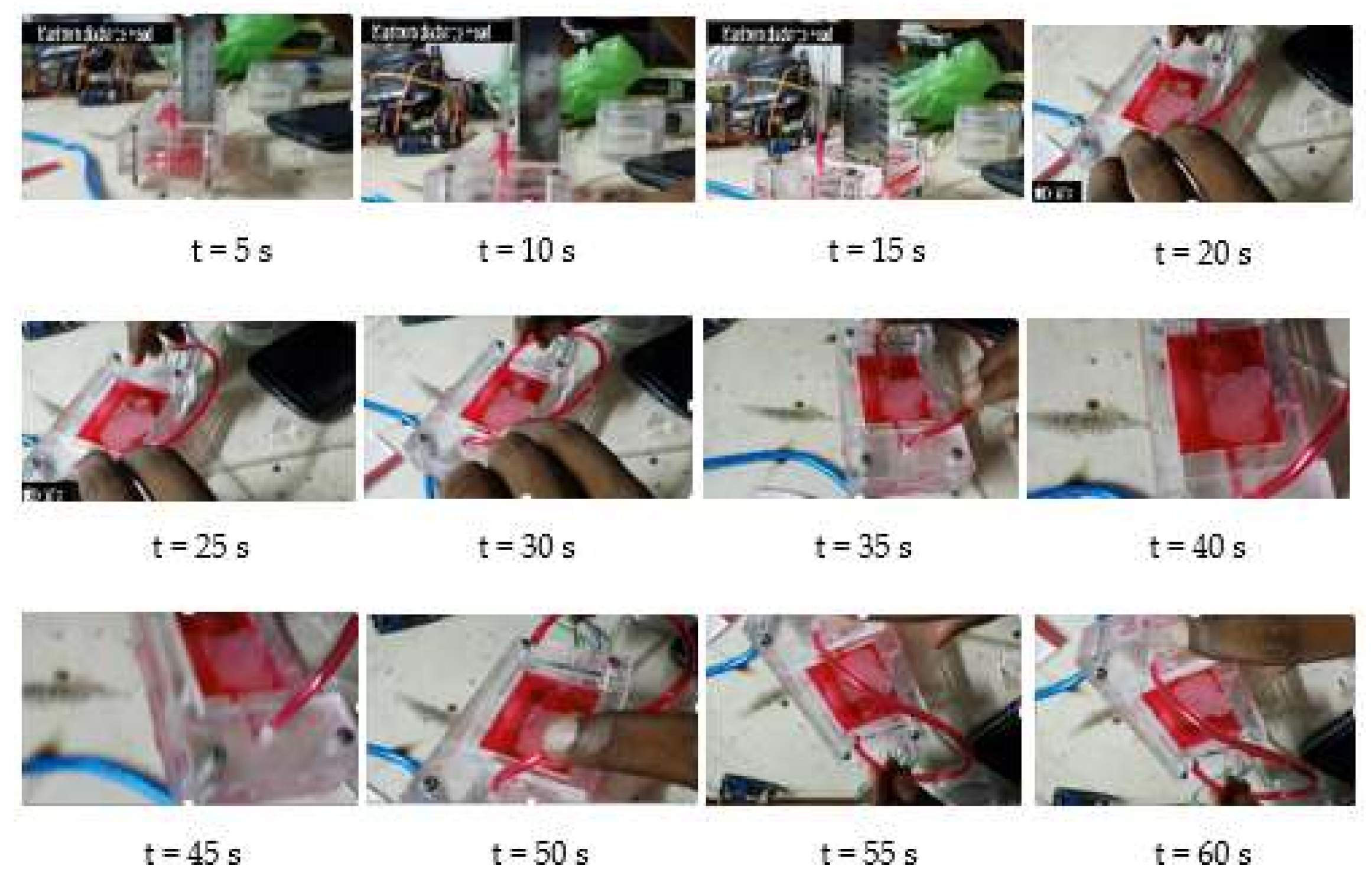
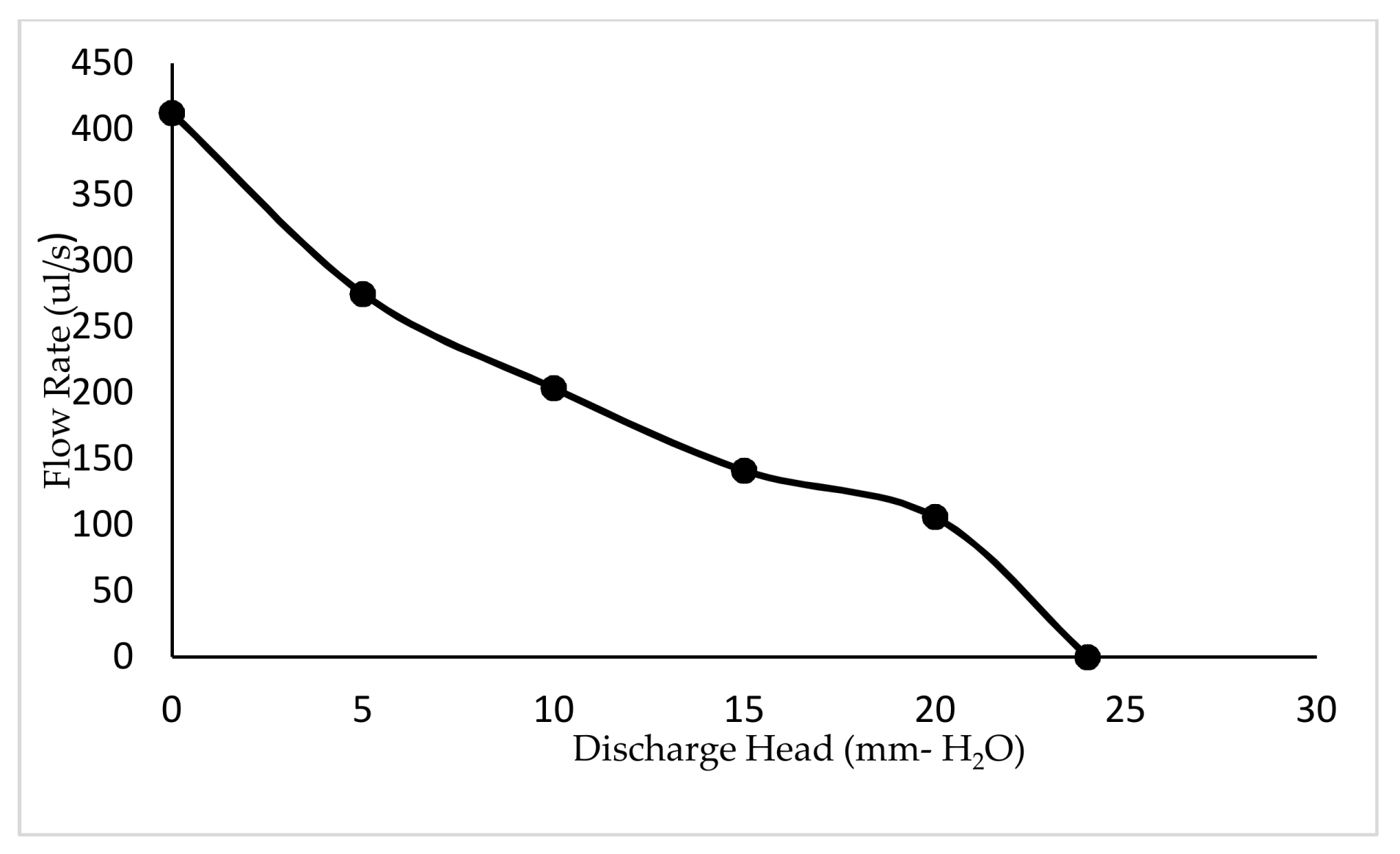
6. Characterization of the Micropump
7. Results and Discussion
8. Conclusions and Future Direction
Author Contributions
Conflicts of Interest
References
- Laser, D.J.; Santiago, J.G. A review of micropumps. J. Micromech. Microeng. 2004, 14, R35–R64. [Google Scholar] [CrossRef]
- Munas, F.R.; Amarasinghe, Y.W.R.; Dao, D. Review on MEMS based Micropumps for Biomedical Applications. Int. J. Innov. Res. Sci. Eng. Technol. 2015, 4, 5602–5615. [Google Scholar]
- Nisar, A.; Afzulpurkar, N.; Mahaisavariya, B.; Tuantranont, A. MEMS-based micropumps in drug delivery and biomedical applications. Sens. Actuators B Chem. 2008, 130, 917–942. [Google Scholar] [CrossRef]
- Yang, H.; Tsai, T.H.; Hu, C.C. Portable Valve-less Peristaltic Micro Pump Design and Fabrication. In Proceedings of the 2008 IEEE Symposium on Design, Test, Integration and Packaging of MEMS/MOEMS, Nice, France, 9–11 April 2008. [Google Scholar]
- Shukur, A.F.M.; Sabani, N.; Taib, B.N.; Azidin, M.A.M.; Shahimin, M.M. Performance characteristics of valveless and cantilever-valve micropump. Proc. SPIE 2013, 8923, 89234B. [Google Scholar] [CrossRef]
- Feng, G.H.; Kim, E.S. Piezoelectrically Actuated Dome-shaped Diaphragm Micropump. IEEE J. Microelectromech. Syst. 2005, 14, 192–199. [Google Scholar] [CrossRef]
- Abhari, F.; Jaafar, H.; Yunus, N.A. A Comprehensive Study of Micropumps Technologies. Int. J. Electrochem. Sci. 2012, 7, 9765–9780. [Google Scholar]
- Zengerle, R.; Ulrich, J.; Kluge, S.; Richter, M.; Richter, A. A bidirectional silicon micropump. Sens. Actuators 1995, A50, 81–86. [Google Scholar] [CrossRef]
- Podder, P.K.; Mallick, D.; Samajdar, D.P.; Bhattacharyya, A. Design, Simulation and Study of MEMS Based Micro-needles and Micro-pump for Biomedical Applications. In Proceedings of the 2011 COMSOL Conference, Bangalore, India, December 2011. [Google Scholar]
- Pandey, M.; Upadhyay, P.C. Design and Simulation of Valveless PZT Micropump for Drug Delivery system. Int. J. Adv. Technol. 2012, 3, 93–100. [Google Scholar]
- Li, S.; Chen, S. Analytical Analysis of a circular PZT actuator for valveless micropumps. Sens. Actuators A 2003, 104, 151–161. [Google Scholar] [CrossRef]
- Woias, P. Micro Pumps—Past, progress and future prospects. Sens. Actuators B Chem. 2005, 105, 28–38. [Google Scholar] [CrossRef]
- Tay, F.E.H. (Ed.) Microfluidics and BioMEMS Applications; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2002. [Google Scholar]
- Spencer, W.J.; Corbett, W.T.; Dominguez, L.R.; Shafer, B.D. An electronically controlled piezoelectric insulin pump and valves. IEEE Trans. Sonics Ultrason. 1978, 25, 153–156. [Google Scholar] [CrossRef]
- Mishra, R.; Bhattacharyya, T.K.; Maiti, T.K. Design and simulation of microfluidic components towards development of a controlled drug delivery platform. In Proceedings of the 2016 IEEE International Conference on VLSI Design, Kolkata, India, 4–8 January 2016; pp. 583–584. [Google Scholar]
- Rojas, J.J.; Morales, J.E. Design and Simulation of a Piezoelectric Actuated Valveless Micropump. In Proceedings of the COMSOL Conference, Boston, MA, USA, 10 July 2015. [Google Scholar]
- Dau, V.T.; Dinh, T.X.; Sakamoto, R.; Tomonori, O.; Tanaka, K.; Sugiyama, S. A Valve-less micropump with PZT diaphragm. In Proceedings of the Twelfth International Conference on Miniaturized Systems for Chemistry and Life Sciences, San Diego, CA, USA, 12–16 October 2008; pp. 1369–1371. [Google Scholar]
- Dau, V.T.; Dinh, T.X.; Sugiyama, S. A MEMS-based silicon micropump with intersecting channels and integrated hotwires. J. Micromech. Microeng. 2009, 19, 1–7. [Google Scholar] [CrossRef]
- Dau, V.T.; Dinh, T.X.; Ktsuhiko, T.; Sugiyama, S. A cross-junction channel valve-less micropump with PZT Actuation. Microsyst. Technol. 2009, 15, 1039–1044. [Google Scholar] [CrossRef]
- Dau, V.T.; Dinh, T.X.; Nguyen, Q.D.; Amarasinghe, R.; Tanaka, K.; Sugiyama, S. Microfluidic valveless pump actuated by electromagnetic force. In Proceedings of the IEEE Sensors, Christchurch, New Zealand, 25–28 October 2009; pp. 679–682. [Google Scholar]
- Dinh, T.X.; Le, N.T.M.; Dau, V.T.; Ogami, Y. A dynamic model for studying valveless electromagnetic micropumps. J. Micromech. Microeng. 2011, 21, 025015. [Google Scholar] [CrossRef]
- Dich, N.Q.; Dinh, T.X.; Pham, P.H.; Dau, V.T. Study of valveless electromagnetic micropump by volume-of-fluid and OpenFOAM. Jpn. J. Appl. Phys. 2015, 57201, 057201. [Google Scholar] [CrossRef]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics—The Finite Volume Method; Prentice Hall: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- Farshid., M.; Ghaus, R. Farshid. M.; Ghaus, R. Design and Simulation of MEMS Based Piezoelectric Insulin Micropump. In Proceedings of the COMSOL Conference, Boston, MA, USA, 10 July 2015. [Google Scholar]
- Timoshenko, S.P.; Goodie, J.N. Theory of Elasticity, 3rd ed.; McGraw-Hill: New York, NY, USA, 1970. [Google Scholar]
- Bamshad, A.; Nikfarjam, A.; Khaleghi, H. A new simple and fast thermally solvent assisted method to bond PMMA–PMMA in micro-fluidics devices. J. Micromech. Microeng. 2016, 26, 065017. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Density (kg/m3) | 8360 |
| Young’s modulus (GPa) | 125 |
| Poisson’s ratio | 0.33 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munas, F.R.; Melroy, G.; Abeynayake, C.B.; Chathuranga, H.L.; Amarasinghe, R.; Kumarage, P.; Dau, V.T.; Dao, D.V. Development of PZT Actuated Valveless Micropump. Sensors 2018, 18, 1302. https://doi.org/10.3390/s18051302
Munas FR, Melroy G, Abeynayake CB, Chathuranga HL, Amarasinghe R, Kumarage P, Dau VT, Dao DV. Development of PZT Actuated Valveless Micropump. Sensors. 2018; 18(5):1302. https://doi.org/10.3390/s18051302
Chicago/Turabian StyleMunas, Fathima Rehana, Gehan Melroy, Chamitha Bhagya Abeynayake, Hiniduma Liyanage Chathuranga, Ranjith Amarasinghe, Pubudu Kumarage, Van Thanh Dau, and Dzung Viet Dao. 2018. "Development of PZT Actuated Valveless Micropump" Sensors 18, no. 5: 1302. https://doi.org/10.3390/s18051302
APA StyleMunas, F. R., Melroy, G., Abeynayake, C. B., Chathuranga, H. L., Amarasinghe, R., Kumarage, P., Dau, V. T., & Dao, D. V. (2018). Development of PZT Actuated Valveless Micropump. Sensors, 18(5), 1302. https://doi.org/10.3390/s18051302