Unsupervised Indoor Localization Based on Smartphone Sensors, iBeacon and Wi-Fi

Abstract
:1. Introduction
2. Related Works
2.1. Trilateration Method
2.2. Fingerprinting-Based Localization
2.3. Pedestrian Dead Reckoning (PDR)
2.4. Hybrid Localization Method
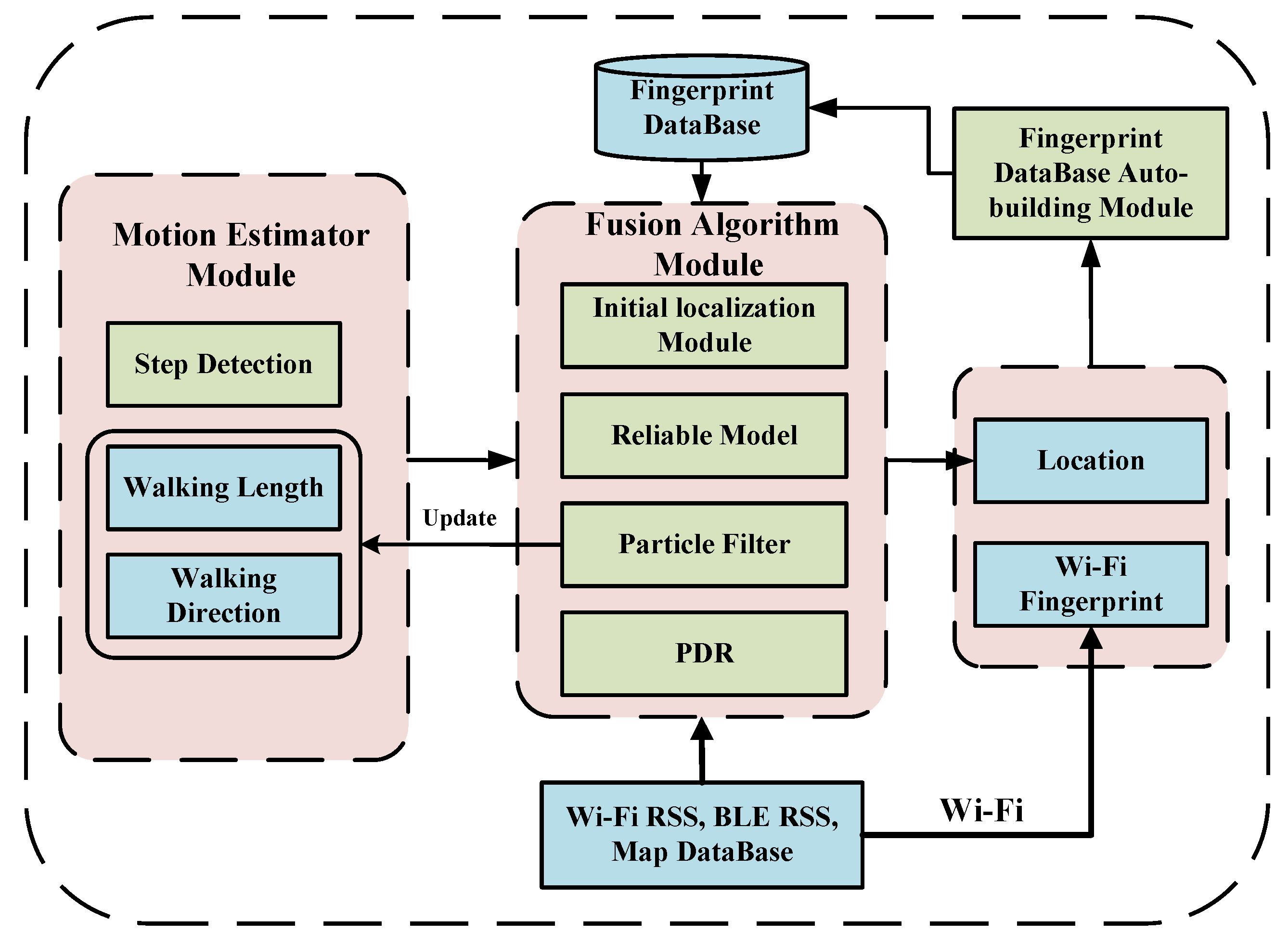
3. Summary of UILoc System
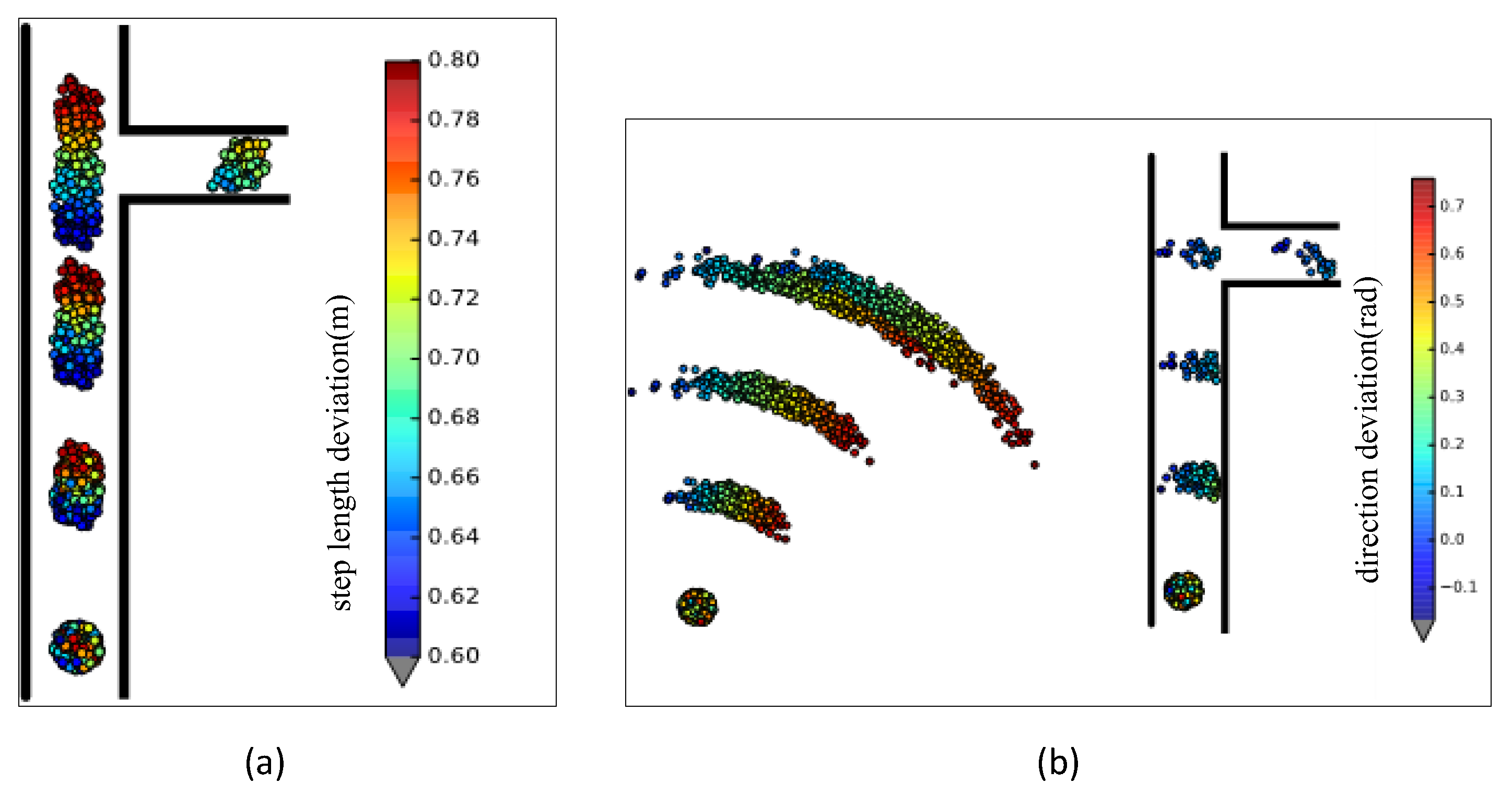
3.1. PDR Module
3.2. Particle Filter Module
3.3. Reliable Model Module
3.4. Fingerprint Database Auto-building Module
3.5. Initial Localization Module
4. Proposed Method
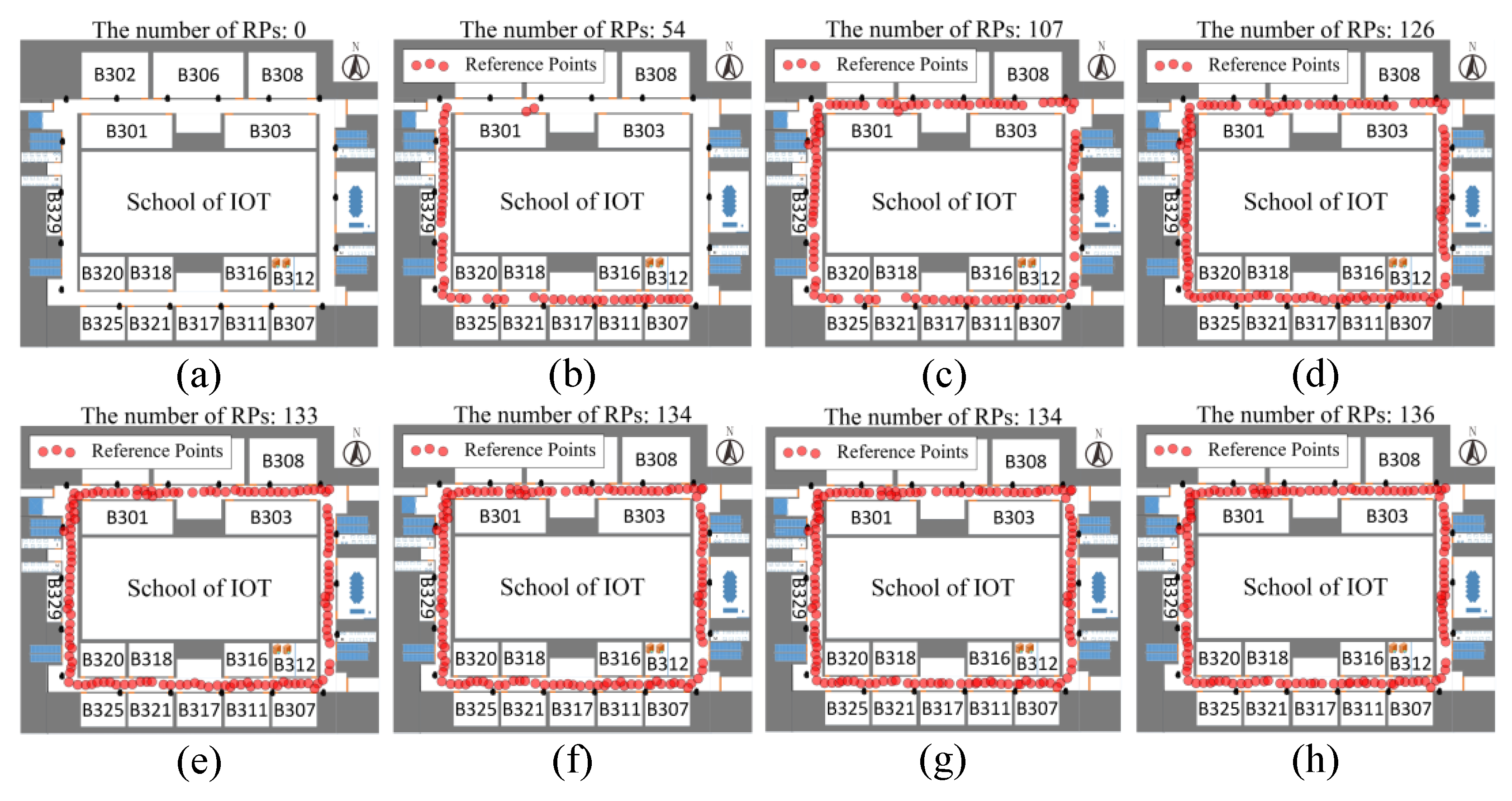
4.1. Fingerprint Database Auto-Building Module
- Firstly, since we can get the location () and Wi-Fi information through this system at the online phase, we need to find the fingerprint in the fingerprint database whose location can be expressed as , and the distance between these two points need to be less than 1 m. Otherwise, we insert the information into the fingerprint database directly.
- Since we can find the fingerprint in the database, then the position and value of RSSI in the fingerprint will be averaged, and update the database.
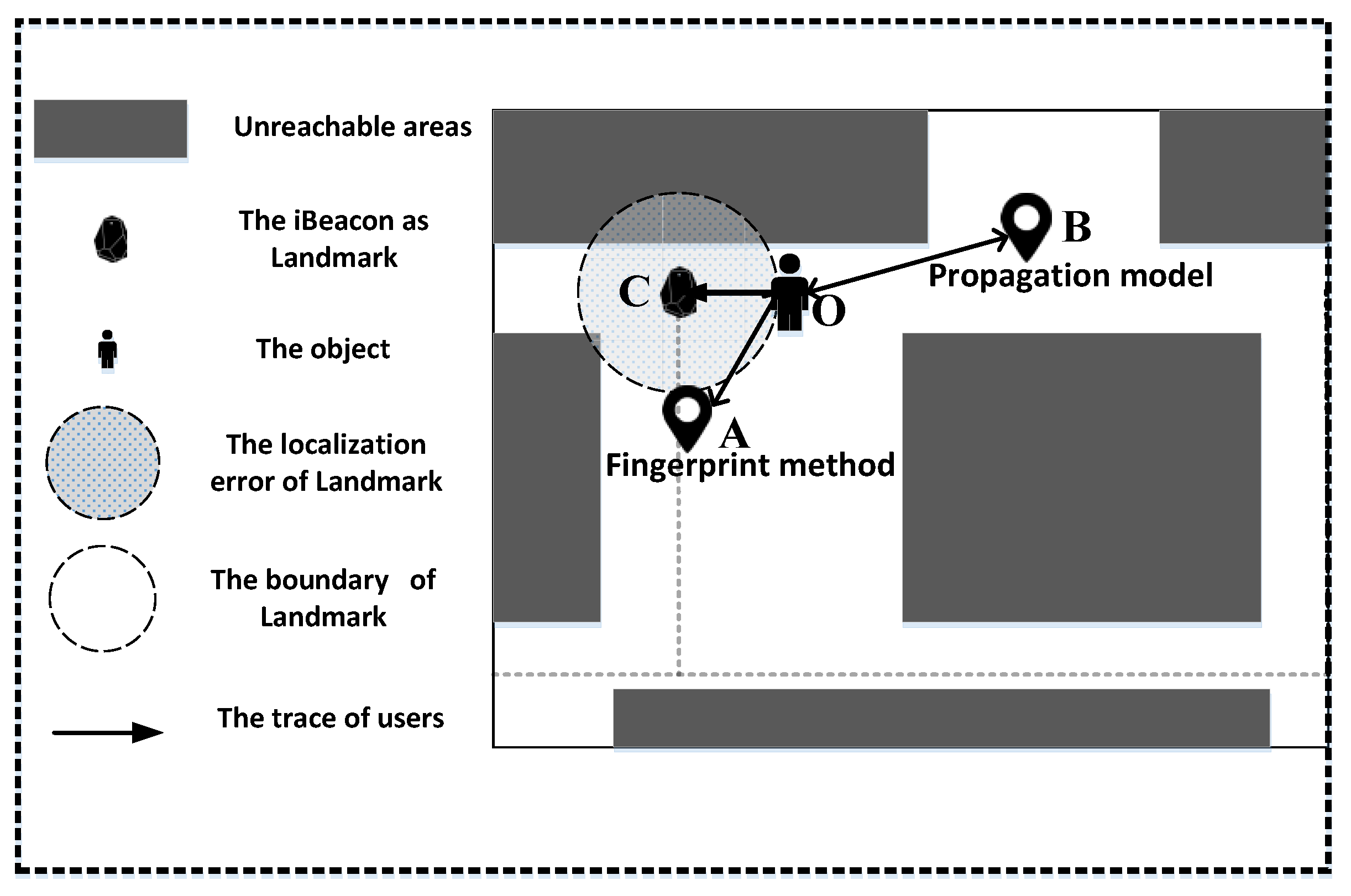
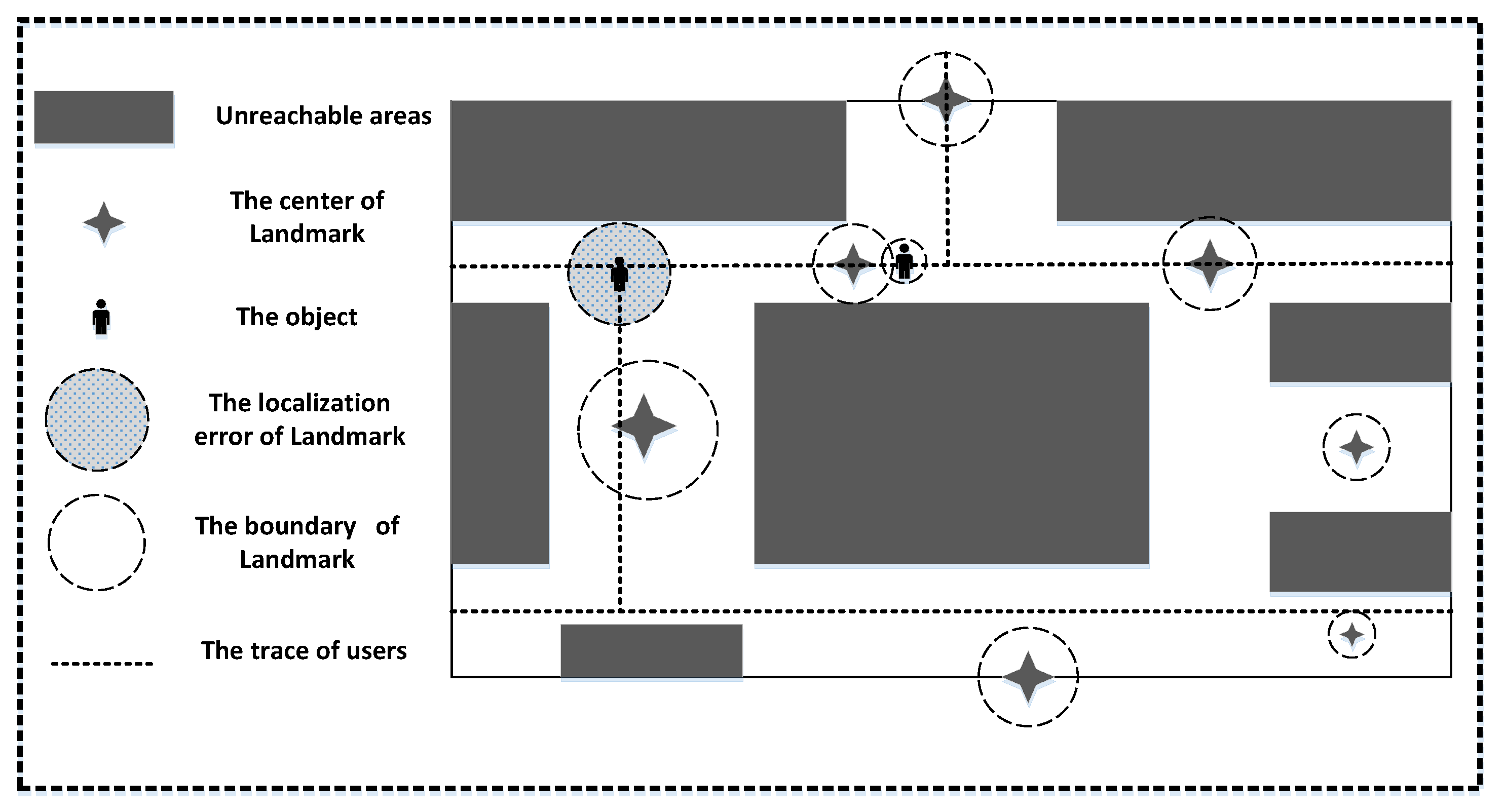
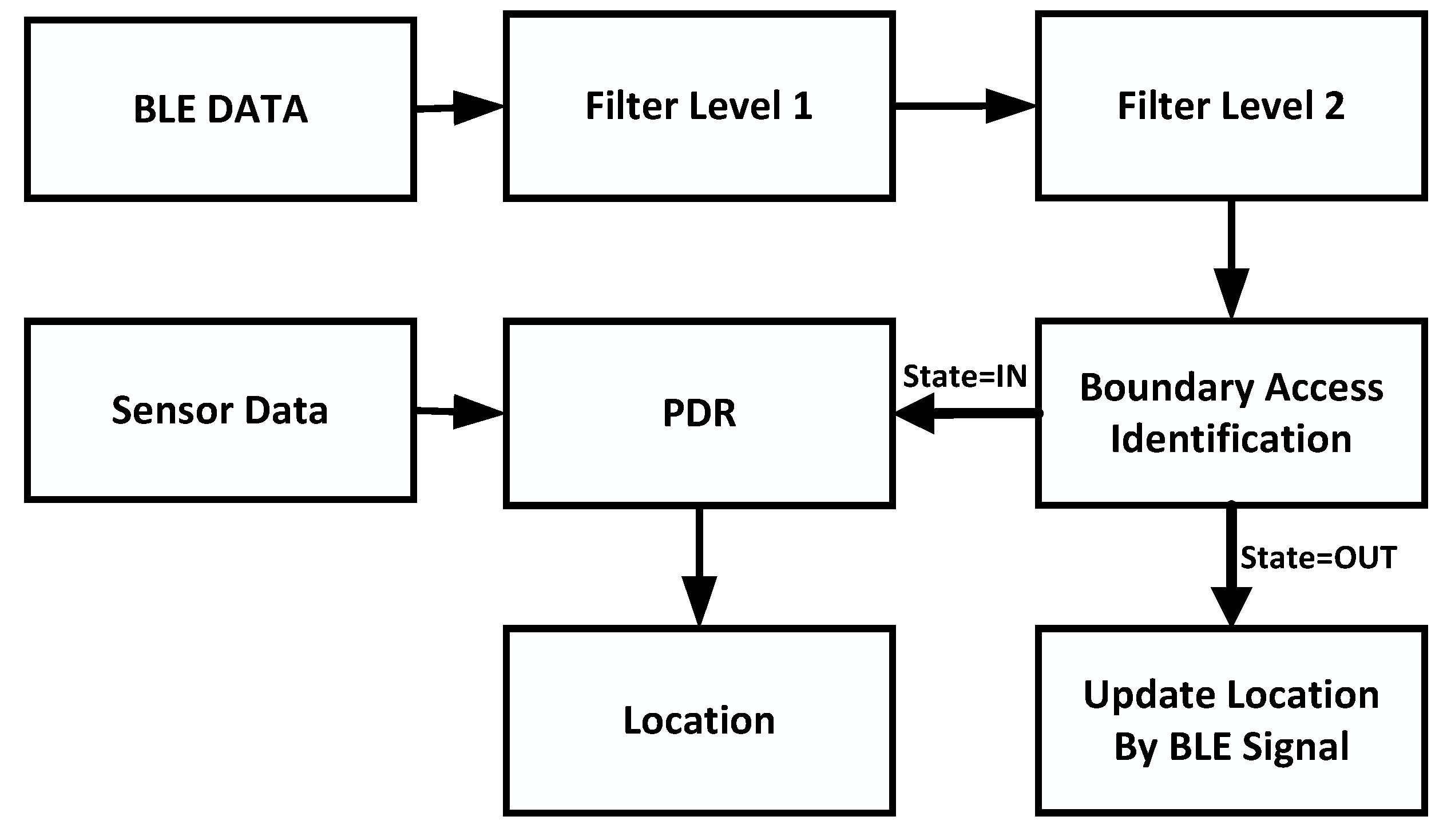
4.2. Initial Localization Module
4.3. Reliable Model
| Algorithm 1 Reliable Model |
|
4.4. UILoc Algorithm Explanation
| Algorithm 2 UILoc |
|
5. Experimental Work and Results
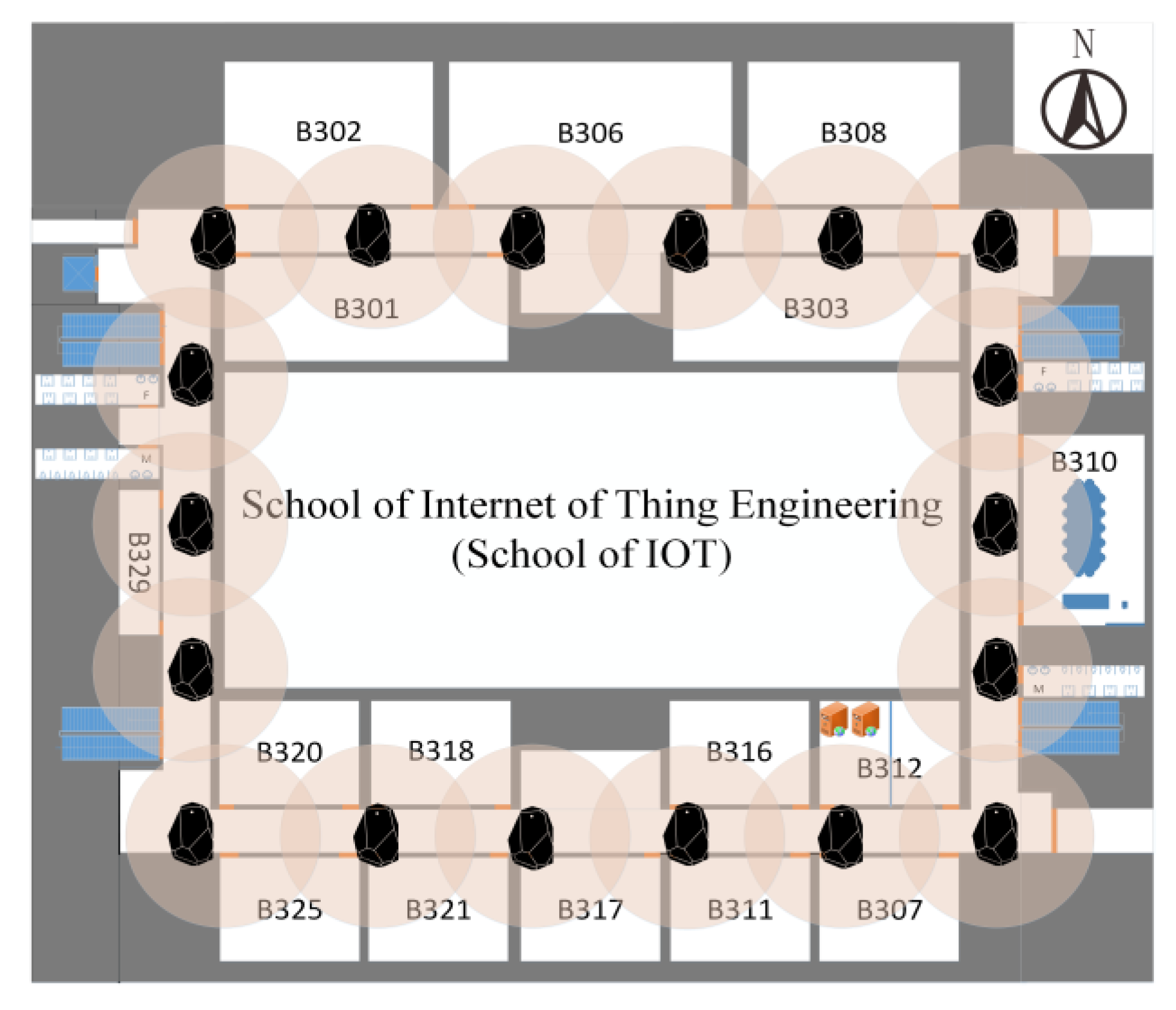
5.1. Experimental Setup
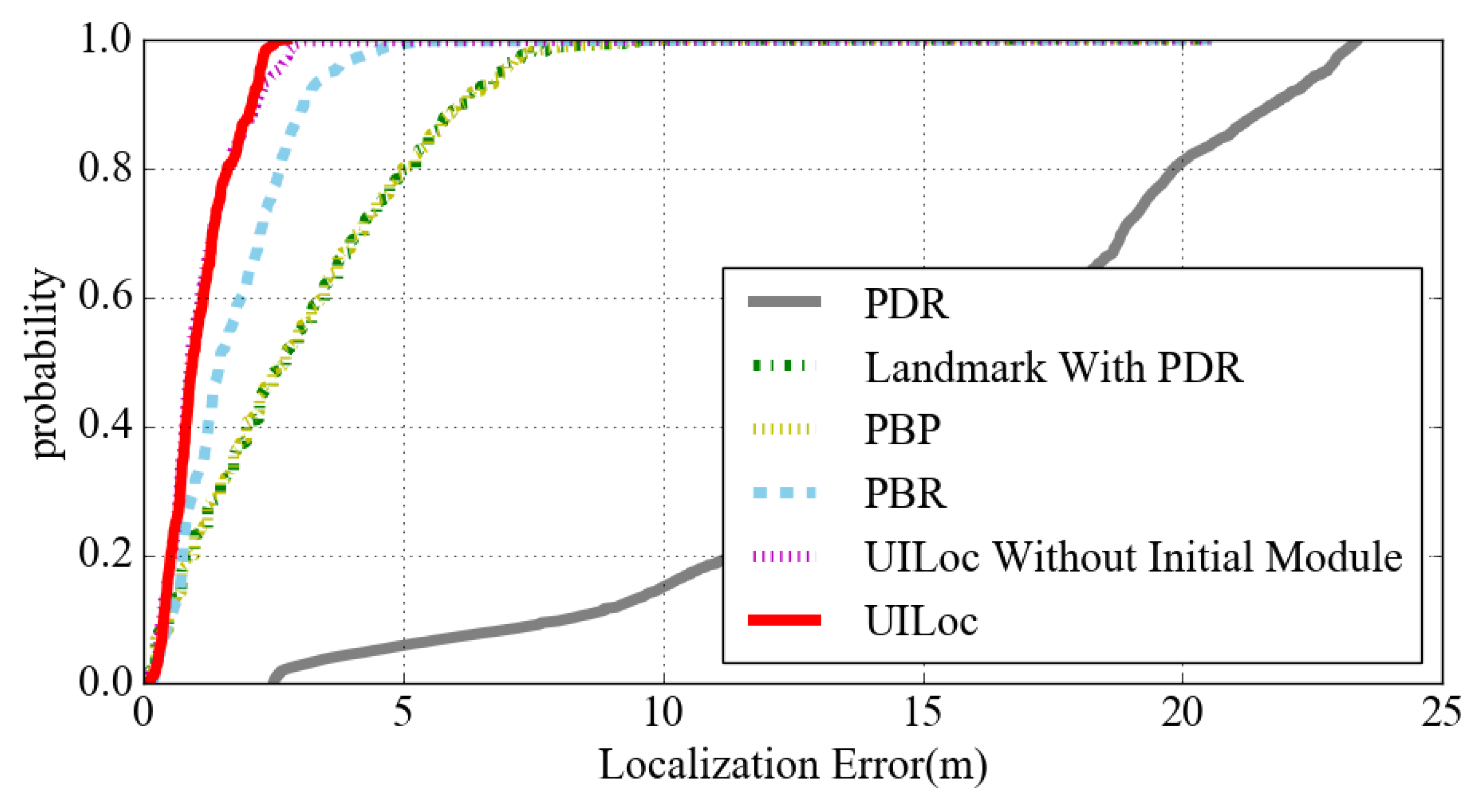
5.2. Performance Evaluation
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Yang, C.; Shao, H.R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Ni, L.; Liu, Y.; Lau, Y.; Patil, A. LANDMARC: Indoor location sensing using active rfid. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-based indoor localization with bluetooth low energy beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Zhu, Q.; Jiang, H.; Soh, Y.C. Indoor localization using smartphone sensors and iBeacons. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 1723–1728. [Google Scholar]
- Zou, H.; Jiang, H.; Luo, Y.; Zhu, J.; Lu, X.; Xie, L. BlueDetect: An iBeacon-enabled scheme for accurate and energy-efficient indoor-outdoor detection and seamless location-based service. Sensors 2016, 16, 268. [Google Scholar] [CrossRef] [PubMed]
- Han, D.; Jung, S.; Lee, M.; Yoon, G. Building a practical Wi-Fi-based indoor navigation system. IEEE Pervasive Comput. 2014, 13, 72–79. [Google Scholar]
- Lim, J.S.; Jang, W.H.; Yoon, G.W.; Han, D.S. Radio map update automation for WiFi positioning systems. IEEE Commun. Lett. 2013, 17, 693–696. [Google Scholar] [CrossRef]
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 293–304. [Google Scholar]
- Yang, S.; Dessai, P.; Verma, M.; Gerla, M. Freeloc: Calibration-free crowdsourced indoor localization. In Proceedings of the 2013 IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 2481–2489. [Google Scholar]
- Wu, C.; Yang, Z.; Liu, Y. Smartphones based crowdsourcing for indoor localization. IEEE Trans. Mob. Comput. 2015, 14, 444–457. [Google Scholar] [CrossRef]
- Kang, W.; Han, Y. SmartPDR: Smartphone-based pedestrian dead reckoning for indoor localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location fingerprinting with bluetooth low energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone inertial sensor-based indoor localization and tracking with iBeacon corrections. IEEE Trans. Ind. Inform. 2016, 12, 1540–1549. [Google Scholar] [CrossRef]
- Golestanian, M.; Poellabauer, C. Indoor localization using multi-range beaconing: Poster. In Proceedings of the 17th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Paderborn, Germany, 5–8 July 2016; pp. 397–398. [Google Scholar]
- Lee, S.H.; Lim, I.K.; Lee, J.K. Method for improving indoor positioning accuracy using extended kalman filter. Mob. Inf. Syst. 2016, 2016, 2369103. [Google Scholar] [CrossRef]
- Botta, M.; Simek, M. Adaptive distance estimation based on RSSI in 802.15. 4 network. Radioengineering 2013, 22, 1162–1168. [Google Scholar]
- Boukerche, A.; Oliveira, H.A.; Nakamura, E.F.; Loureiro, A.A. Localization systems for wireless sensor networks. IEEE Wirel. Commun. 2007, 14. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N.; Balachandran, A. Enhancements to the RADAR User Location and Tracking System. Available online: https://www.microsoft.com/en-us/research/publication/enhancements-to-the-radar-user-location-and-tracking-system/ (accessed on 12 April 2018).
- Castro, P.; Chiu, P.; Kremenek, T.; Muntz, R. A probabilistic room location service for wireless networked environments. In Proceedings of the 3rd International Conference on Ubiquitous Computing, Atlanta, GA, USA, 30 September–2 October 2001; pp. 18–34. [Google Scholar]
- Youssef, M.; Agrawala, A. The Horus WLAN location determination system. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Seattle, WA, USA, 6–8 June 2005; pp. 205–218. [Google Scholar]
- Youssef, M.; Agrawala, A. The Horus WLAN Location Determination System. Wirel. Netw. 2008, 14, 357–374. [Google Scholar] [CrossRef]
- Moghtadaiee, V.; Dempster, A.G.; Lim, S. Indoor localization using fm radio signals: A fingerprinting approach. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimarães, Portugal, 21–23 September 2011; pp. 1–7. [Google Scholar]
- Moghtadaiee, V.; Dempster, A.G. Indoor location fingerprinting using FM radio signals. IEEE Trans. Broadcast. 2014, 60, 336–346. [Google Scholar] [CrossRef]
- Jin, Y.; Toh, H.S.; Soh, W.S.; Wong, W.C. A robust dead-reckoning pedestrian tracking system with low cost sensors. In Proceedings of the 2011 IEEE International Conference on Pervasive Computing and Communications (PerCom), Seattl, WA, USA, 21–25 March 2011; pp. 222–230. [Google Scholar]
- Wang, G.; Liang, J.; Chen, J.; Zhu, X. Step counting algorithm based on FSM using acceleration differential. J. Front. Comput. Sci. Technol. 2016, 10, 1133–1142. (In Chinese) [Google Scholar]
- Alzantot, M.; Youssef, M. UPTIME: Ubiquitous pedestrian tracking using mobile phones. In Proceedings of the 2012 IEEE theWireless Communications and Networking Conference (WCNC), Shanghai, China, 1–4 April 2012; pp. 3204–3209. [Google Scholar]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No need to war-drive: Unsupervised indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Lake District, UK, 25–29 June 2012; pp. 197–210. [Google Scholar]
- Yang, F.; Lu, J.L.; Theoleyre, F.; Shu, W.; Wu, M.Y. Dynamic active area clustering with inertial information for fingerprinting based indoor localization systems. In Proceedings of the IFIP Networking Conference (IFIP Networking), Toulouse, France, 20–22 May 2015; pp. 1–9. [Google Scholar]
- Pelant, J.; Tlamsa, Z.; Benes, V.; Polak, L.; Kaller, O.; Bolecek, L.; Kufa, J.; Sebesta, J.; Kratochvil, T. BLE device indoor localization based on RSS fingerprinting mapped by propagation modes. In Proceedings of the 2017 27th International Conference on Radioelektronika (RADIOELEKTRONIKA), Brno, Czech Republic, 19–20 April 2017; pp. 1–5. [Google Scholar]
- Zhou, C.; Yuan, J.; Liu, H.; Qiu, J. Bluetooth Indoor Positioning Based on RSSI and Kalman Filter. Wirel. Pers. Commun. 2017, 96, 4115–4130. [Google Scholar] [CrossRef]
- Röbesaat, J.; Zhang, P.; Abdelaal, M.; Theel, O. An Improved BLE Indoor Localization with Kalman-Based Fusion: An Experimental Study. Sensors 2017, 17, 951. [Google Scholar] [CrossRef] [PubMed]
- Davidson, P.; Collin, J.; Takala, J. Application of particle filters for indoor positioning using floor plans. In Proceedings of the Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Kirkkonummi, Finland, 14–15 October 2010; pp. 1–4. [Google Scholar]
- Widyawan, K.M.; Beauregard, S. A backtracking particle filter for fusing building plans with PDR displacement estimates. In Proceedings of the 5th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 27 March 2008; pp. 207–212. [Google Scholar]
- YouTube. UILoc Experiment. 2018. Available online: https://youtu.be/o6880f2uv9o (accessed on 12 April 2018).
- YouTube. Summary of Different Localization Algorithms. 2018. Available online: https://youtu.be/kLvYlNMLtww (accessed on 12 April 2018).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | 50% | 75% | Mean | RMSE |
|---|---|---|---|---|
| PDR | 16.52 | 19.29 | 15.56 | 16.41 |
| PB | 2.75 | 4.60 | 3.06 | 3.76 |
| PBP | 2.75 | 4.50 | 3.04 | 3.74 |
| PBR | 1.49 | 2.44 | 1.77 | 2.26 |
| KNN | 2.0 | 3.5 | 2.36 | 2.97 |
| UILoc | 0.96 | 1.47 | 1.11 | 1.26 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Zhang, Y.; Xue, W. Unsupervised Indoor Localization Based on Smartphone Sensors, iBeacon and Wi-Fi. Sensors 2018, 18, 1378. https://doi.org/10.3390/s18051378
Chen J, Zhang Y, Xue W. Unsupervised Indoor Localization Based on Smartphone Sensors, iBeacon and Wi-Fi. Sensors. 2018; 18(5):1378. https://doi.org/10.3390/s18051378
Chicago/Turabian StyleChen, Jing, Yi Zhang, and Wei Xue. 2018. "Unsupervised Indoor Localization Based on Smartphone Sensors, iBeacon and Wi-Fi" Sensors 18, no. 5: 1378. https://doi.org/10.3390/s18051378
APA StyleChen, J., Zhang, Y., & Xue, W. (2018). Unsupervised Indoor Localization Based on Smartphone Sensors, iBeacon and Wi-Fi. Sensors, 18(5), 1378. https://doi.org/10.3390/s18051378