Pido: Predictive Delay Optimization for Intertidal Wireless Sensor Networks

 , and
, and
Abstract
:1. Introduction
2. Related Works and Contributions
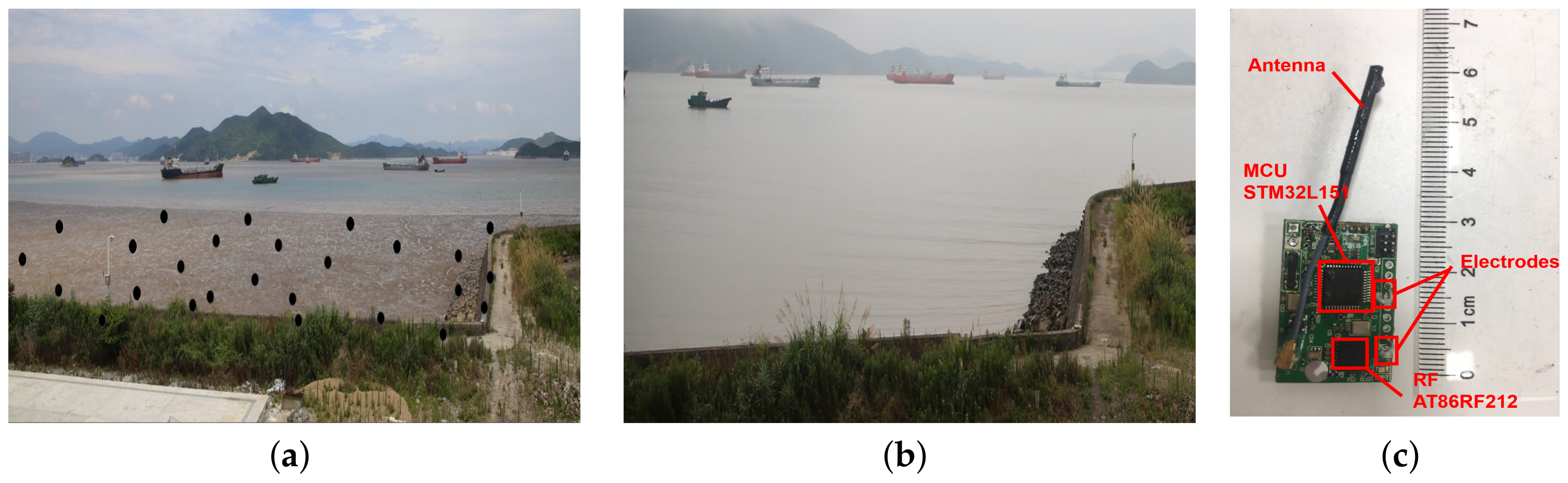
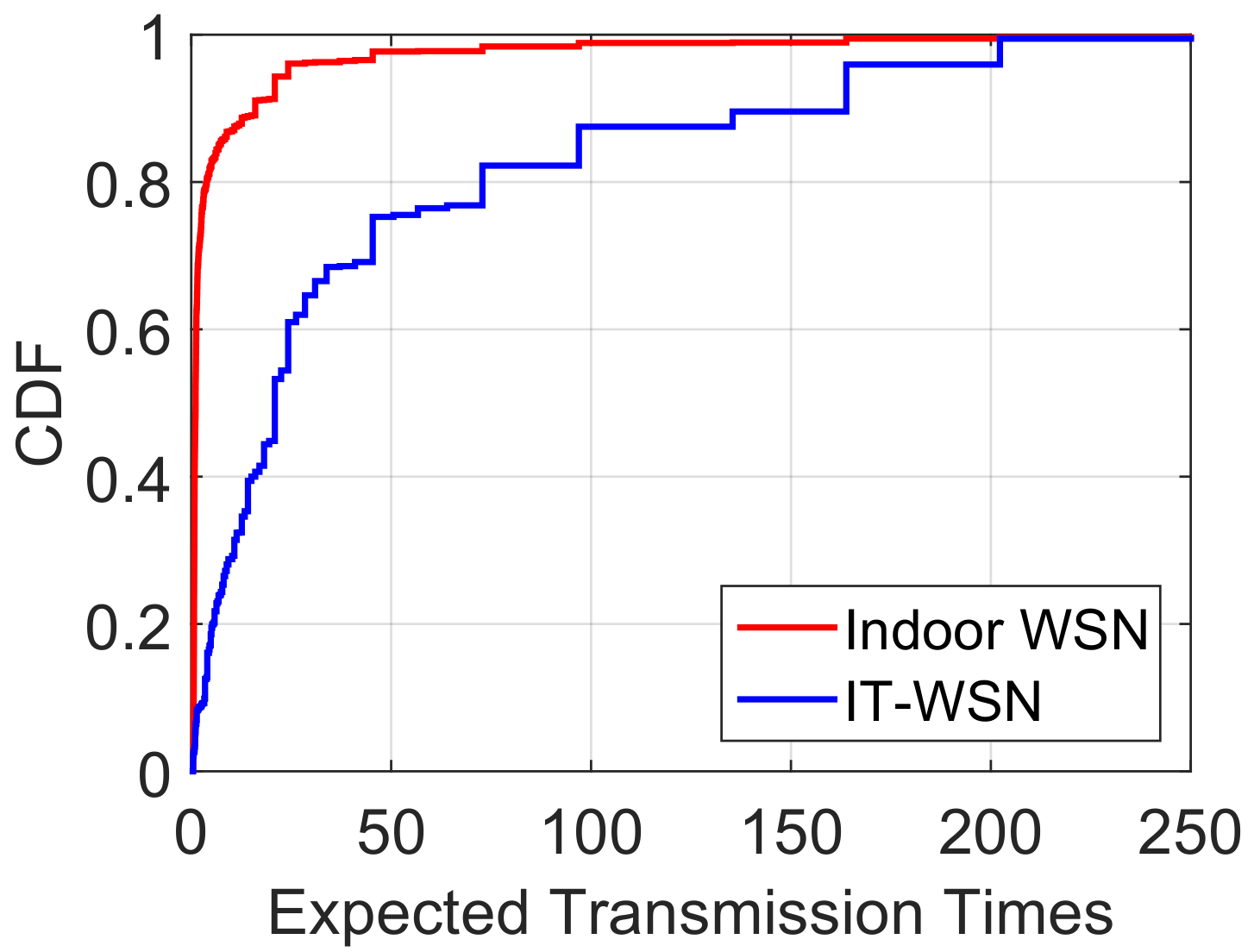
- We deploy a wireless sensor network in the intertidal area in Zhoushan and systematically investigate the components of delays based on real traces collected from the IT-WSN. Due to the harsh deployment environment, delays in IT-WSNs can be dramatically longer than WSNs more commonly used in terrestrial environments. To the best of our knowledge, this is the first work on delay optimization in real IT-WSNs.
- We analyze the feasibility of utilizing implicit indicators to predict nodes future status for IT-WSNs. We specially select indicators and compare the prediction accuracy among different classification algorithms.
- We introduce Pido , a delay optimization framework for IT-WSNs. Pido jointly considers delays caused by link quality and node conditions.
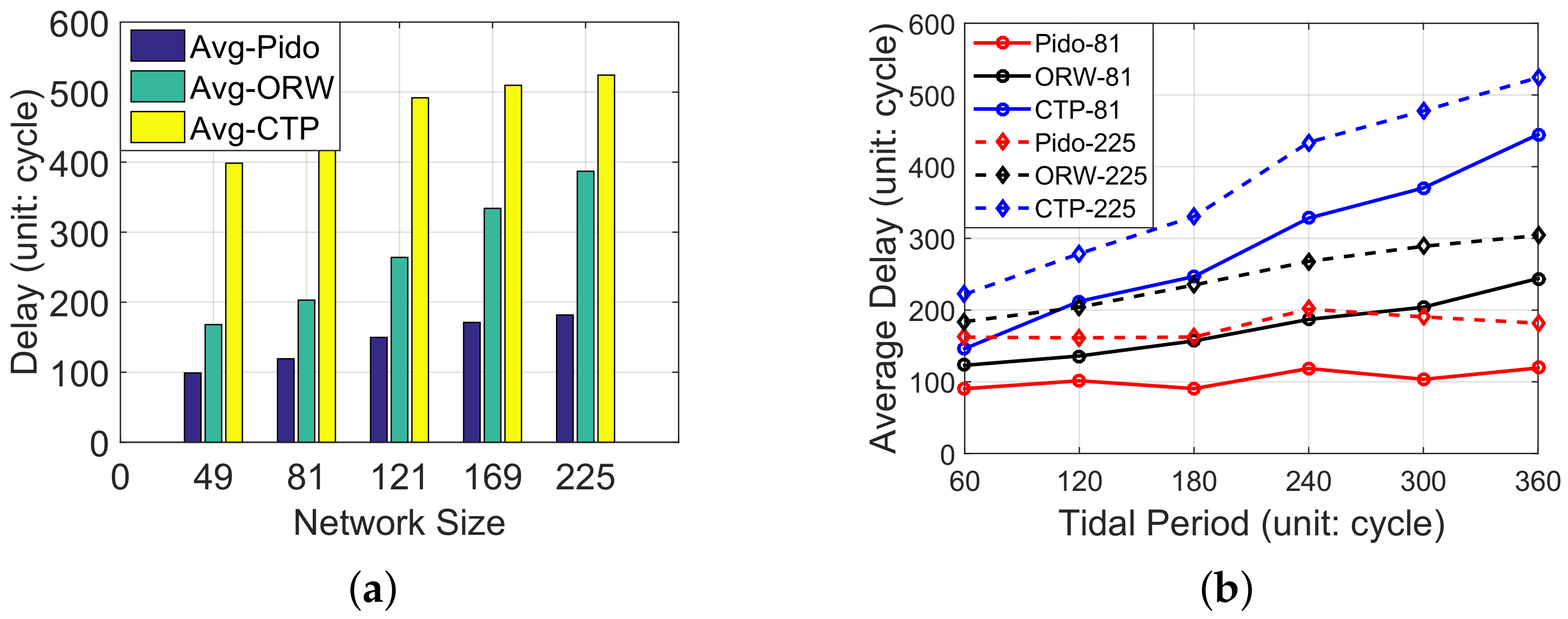
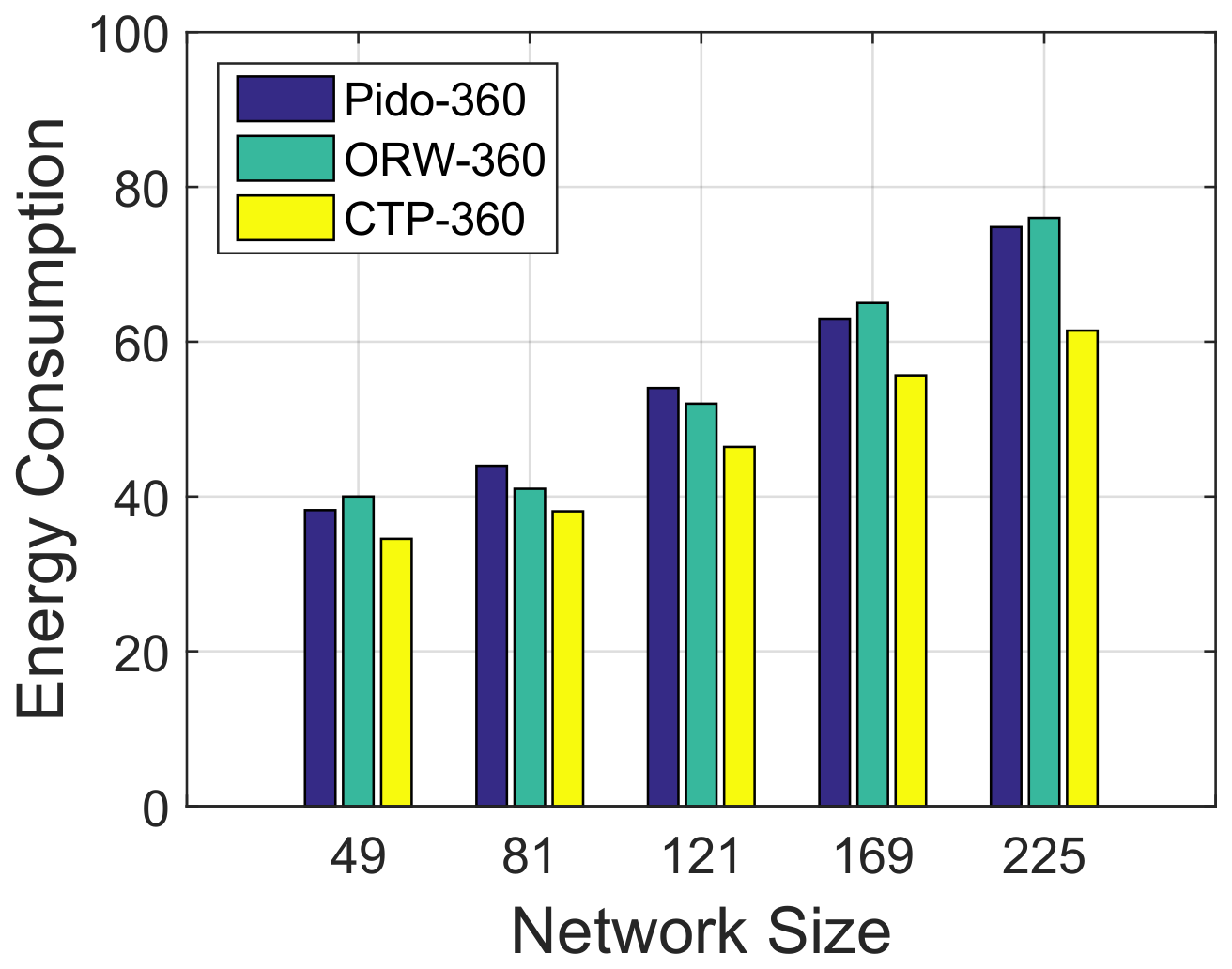
- We evaluate the performance of Pido with real-world system data and implement it in a large-scale simulation with various network sizes. We compare the results with CTP (Collection Tree Protocol) and ORW (Opportunistic Routing in WSNs), and exhaustive results demonstrate that Pido can optimize the system delay with limited overhead.
3. System Deployment and Motivation
3.1. Intertidal WSN
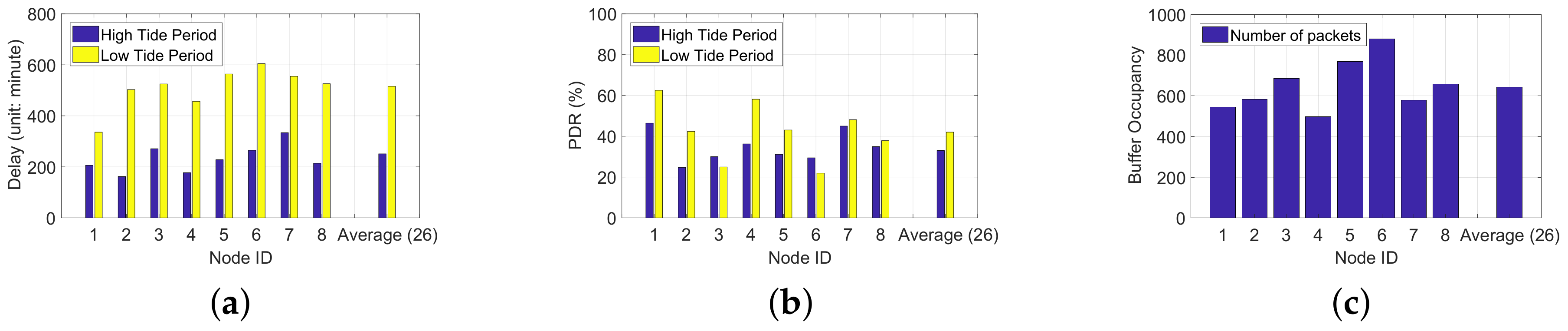
3.2. Delay Problem in IT-WSN
3.3. Predicting Node Status
4. Design of Pido
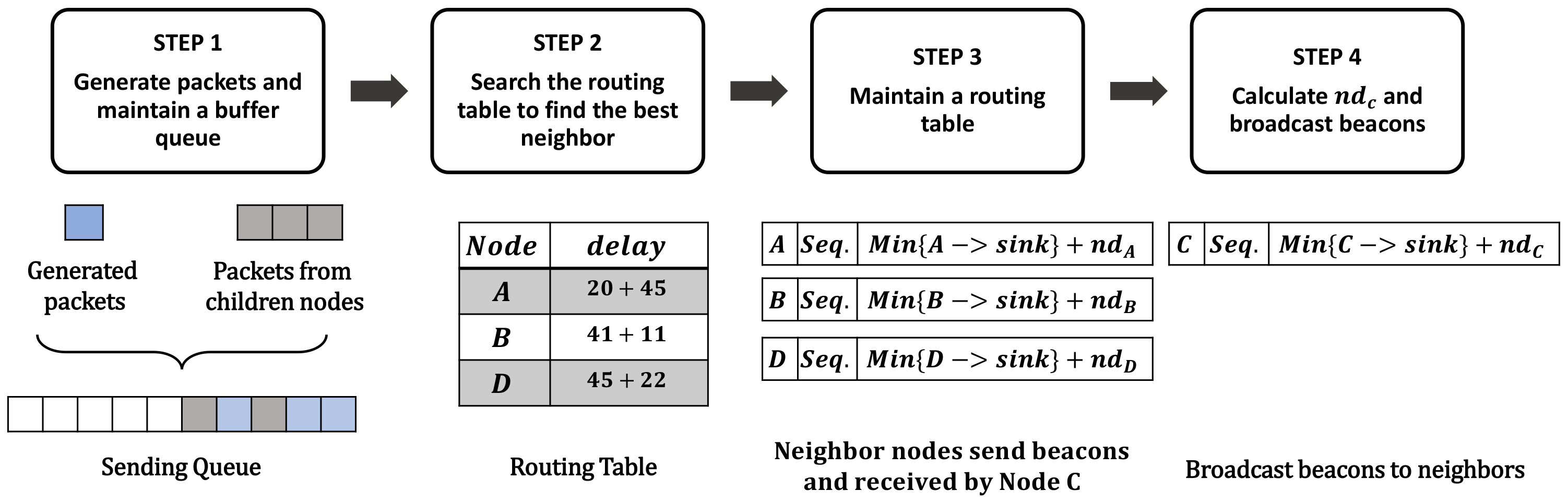
4.1. Overview of Pido
- Step 1: The node generates a packet at each cycle, and receives packets from children. Packets are stored in a sending queue and sent based on the FIFO (first in first out) rule.
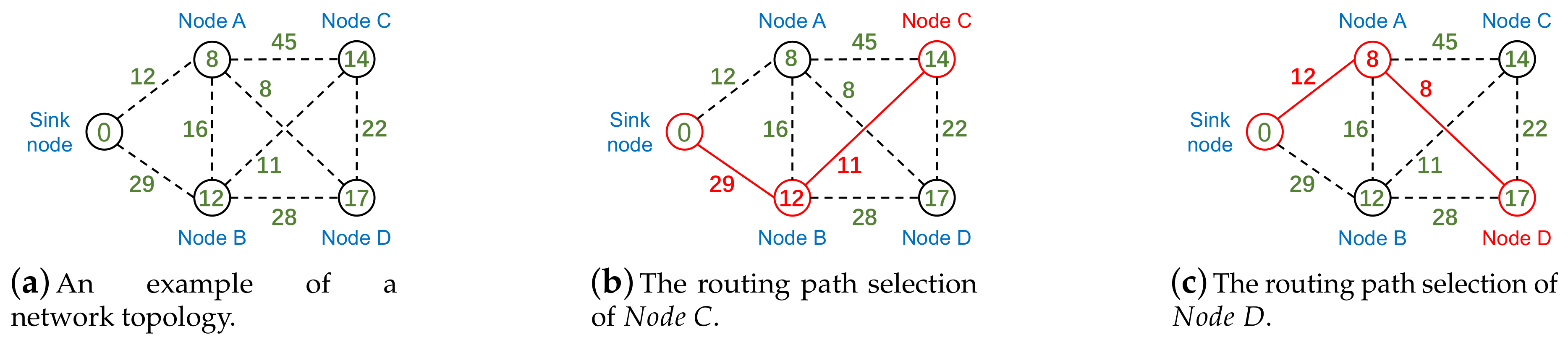
- Step 2: When the sending queue is not empty, the node checks the routing table and searches for the best candidate to forward packets.
- Step 3: The node then maintains a routing table and updates it with beacons from neighbors.
- Step 4: The node activates self-check to calculate the process capability and buffer status, and broadcasts beacons periodically to announce the delay from itself to the sink () to neighbors.
4.2. Delay Modeling in Intertidal WSN
Modeling of Link Delay and Node Delay
4.3. The Prediction of
4.3.1. Indicators
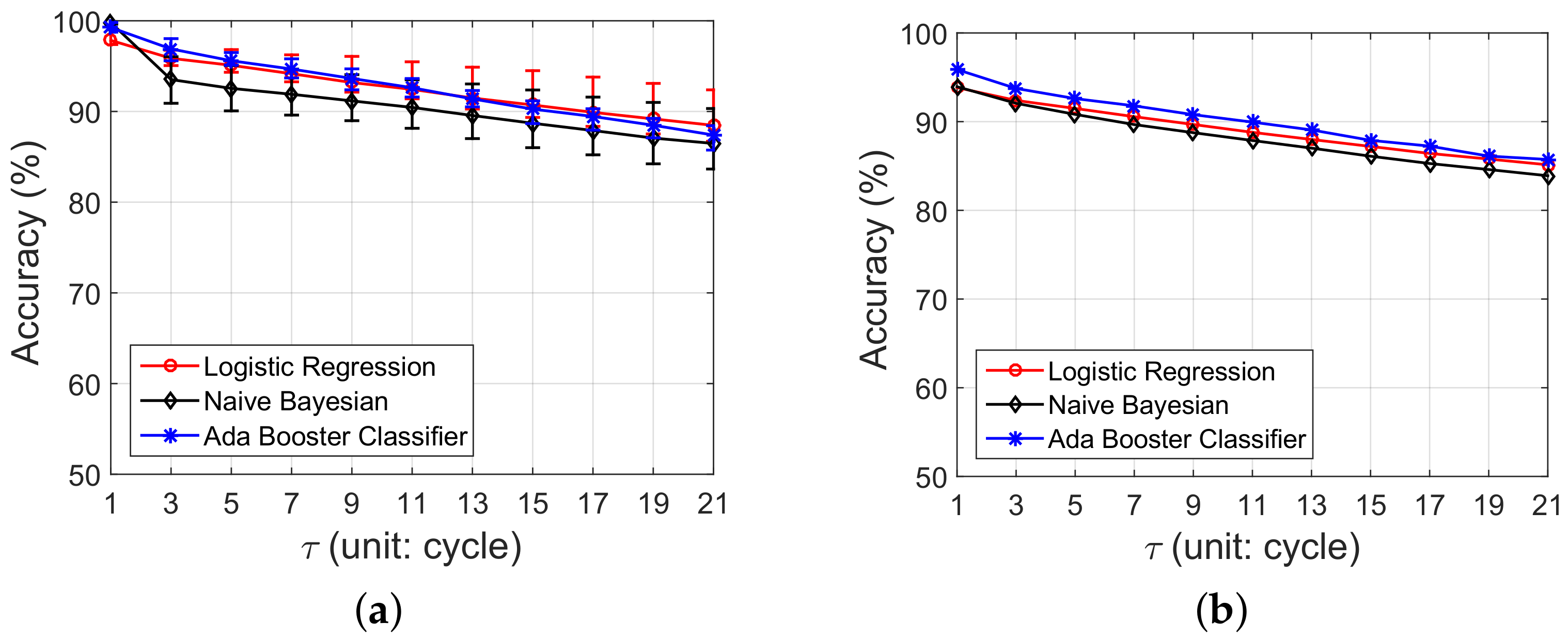
4.3.2. Classifier
- Data collection: We collect training sets from several tide periods at the beginning of the system initialization, and utilize electrode readings () as status labels. The indicators can be easily obtained by reading the registers, and the algorithms are feasible to be implemented on WSN sensor nodes.
- Training a classifier: We first train each node a specialized classifier at the base station. Though this way can predict future status accurately, we find that it consumes too many calculating resources and storage especially when the network has a large quantity of nodes. Fortunately, the indicators we selected may have similar patterns among nodes. For example, nodes deployed in the same bay will share the same tide period and may have similar wave exposures, and above water duration () may thus also fit similar patterns among nodes. Utilizing this characteristic, we mix the data from all nodes and train a universal classifier.
- Classifier dissemination: Base station trains a universal classifier, and broadcasts it to each node. With the classifier and local system knowledge (), nodes can predict future status by itself accurately.
4.4. Performance Evaluation of Pido
4.4.1. A Comparison between Pido , CTP and ORW
4.4.2. Simulation Settings
4.4.3. Performance Metrics and Simulation Parameters
4.4.4. Delay Evaluation
4.4.5. A Comparison of the Field Test and the Simulation
5. Assessment of Pido
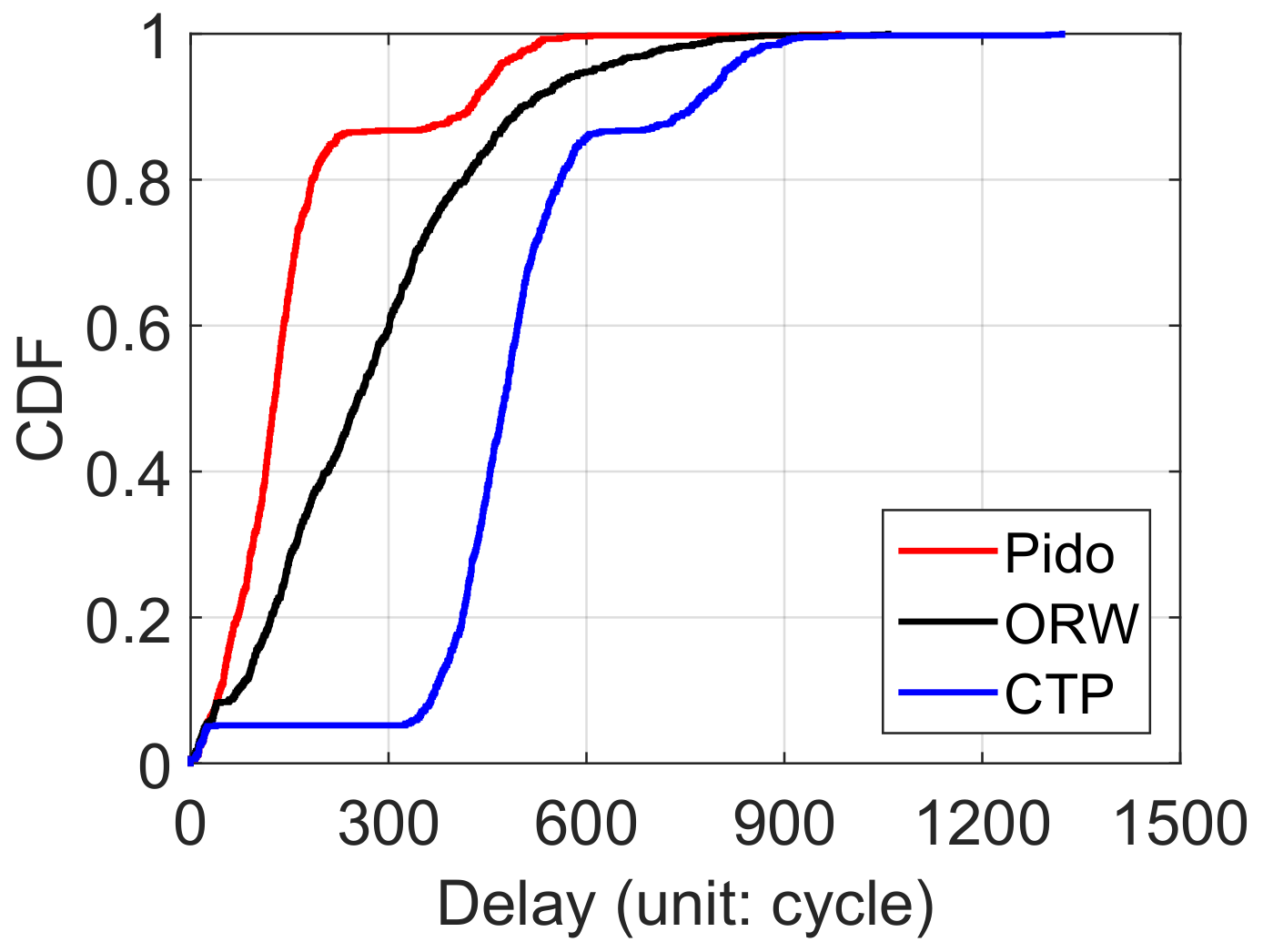
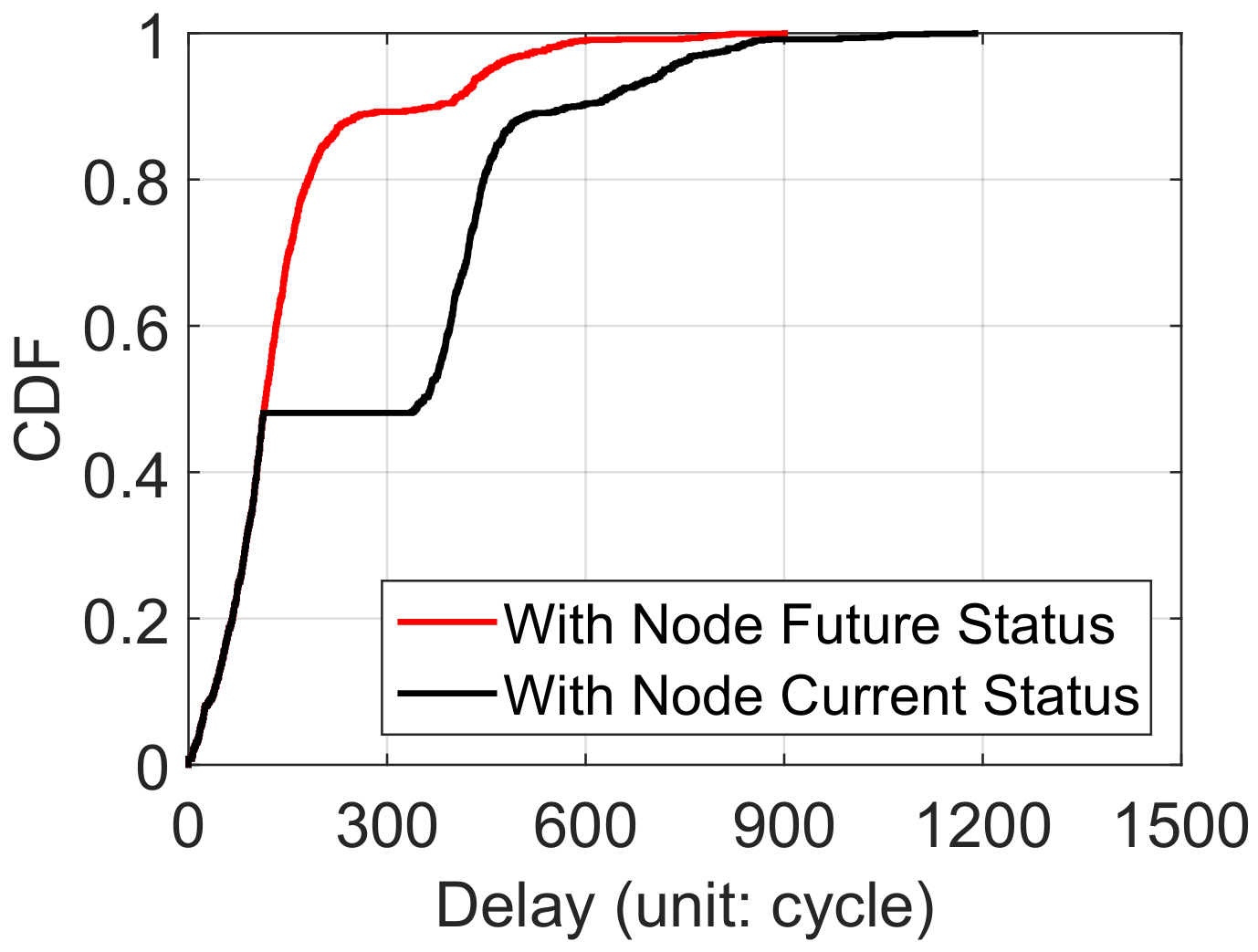
The Delay Distribution of Pido
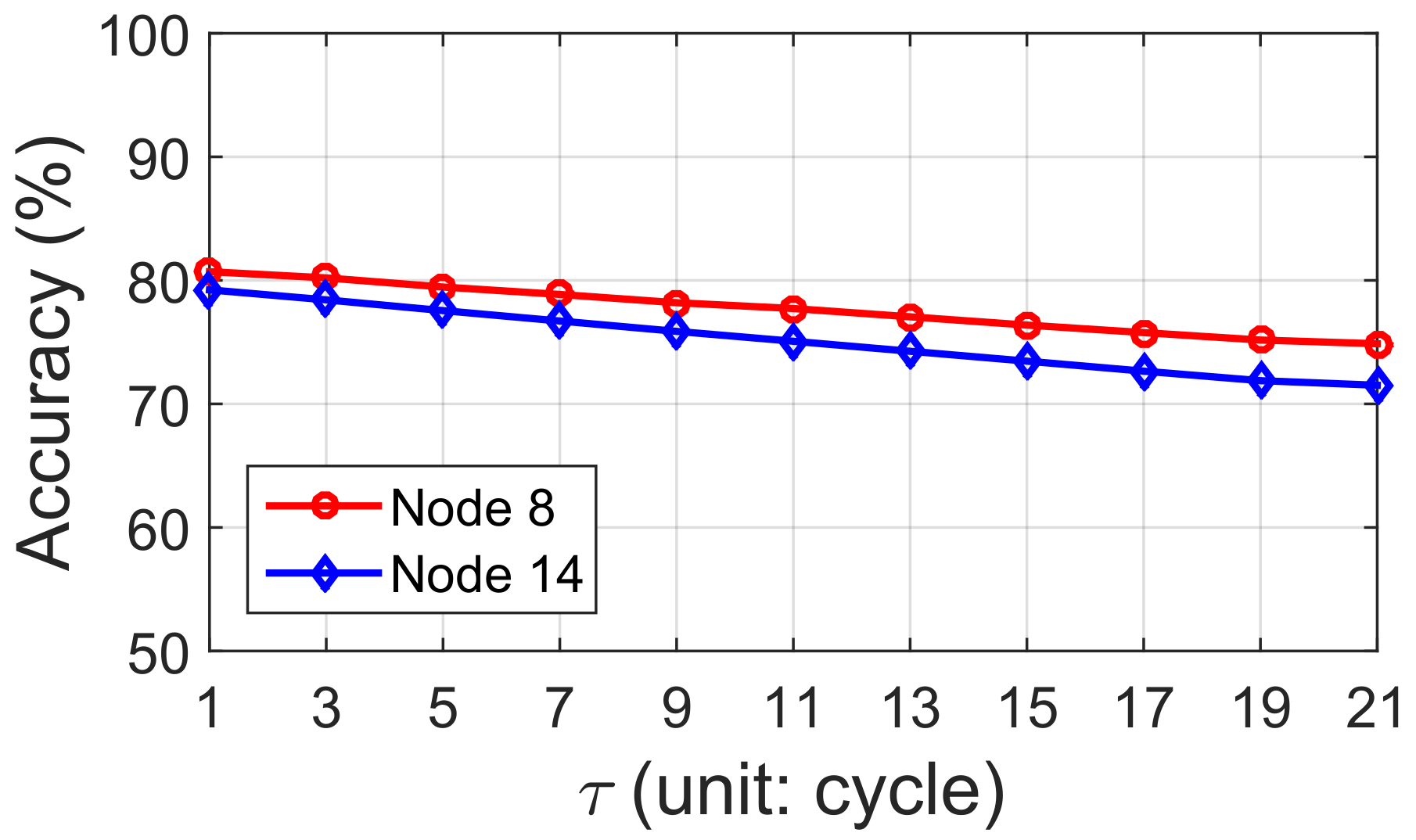
The Evaluation of Predicting
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Helmuth, B.; Mieszkowska, N.; Moore, P.; Hawkins, S.J. Living on the edge of two changing worlds: Forecasting the responses of rocky intertidal ecosystems to climate change. Annu. Rev. Ecol. Evol. Syst. 2006, 37, 373–404. [Google Scholar] [CrossRef]
- Helmuth, B. How do we measure the environment? Linking intertidal thermal physiology and ecology through biophysics. Integr. Comp. Biol. 2002, 42, 837–845. [Google Scholar] [CrossRef] [PubMed]
- Helmuth, B.; Choi, F.; Matzelle, A.; Torossian, J.L.; Morello, S.L.; Mislan, K.; Yamane, L.; Strickland, D.; Szathmary, P.L.; Gilman, S.E.; et al. Long-term, high frequency in situ measurements of intertidal mussel bed temperatures using biomimetic sensors. Sci. Data 2016, 3, 160087. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Xu, W. Taco: Temperature-aware compensation for time synchronization in wireless sensor networks. In Proceedings of the 2013 IEEE 10th International Conference on Mobile Ad-Hoc and Sensor Systems (MASS), Hangzhou, China, 14–16 October 2013; pp. 122–130. [Google Scholar]
- Xu, M.; Xu, W.; Han, T.; Lin, Z. Energy-efficient time synchronization in wireless sensor networks via temperature-aware compensation. ACM Trans. Sens. Netw. (TOSN) 2016, 12, 12. [Google Scholar] [CrossRef]
- Little, T.D.; Konrad, J.; Ishwar, P. A wireless video sensor network for autonomous coastal sensing. In Proceedings of the Conference on Coastal Environmental Sensing Networks (CESN 2007), Boston, MA, USA, 12 April 2007. [Google Scholar]
- Wang, X.; Wang, X.; Xing, G.; Yao, Y. Dynamic duty cycle control for end-to-end delay guarantees in wireless sensor networks. In Proceedings of the 2010 IEEE 18th International Workshop on Quality of Service (IWQoS), Beijing, China, 16–18 June 2010; pp. 1–9. [Google Scholar]
- Yao, Y.; Cao, Q.; Vasilakos, A.V. EDAL: An energy-efficient, delay-aware, and lifetime-balancing data collection protocol for heterogeneous wireless sensor networks. IEEE/ACM Trans. Netw. (TON) 2015, 23, 810–823. [Google Scholar] [CrossRef]
- Dong, M.; Ota, K.; Liu, A.; Guo, M. Joint optimization of lifetime and transport delay under reliability constraint wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2016, 27, 225–236. [Google Scholar] [CrossRef]
- Landsiedel, O.; Ghadimi, E.; Duquennoy, S.; Johansson, M. Low power, low delay: Opportunistic routing meets duty cycling. In Proceedings of the 11th International Conference on Information Processing in Sensor Networks, Beijing, China, 16–20 April 2012; pp. 185–196. [Google Scholar]
- Srinivasa, S.; Krishnamurthy, S. CREST: An opportunistic forwarding protocol based on conditional residual time. In Proceedings of the 2009 6th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, Rome, Italy, 22–26 June 2009; pp. 1–9. [Google Scholar]
- Bulut, E.; Geyik, S.C.; Szymanski, B.K. Conditional shortest path routing in delay tolerant networks. In Proceedings of the 2010 IEEE International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Montrreal, QC, Canada, 14–17 June 2010; pp. 1–6. [Google Scholar]
- Srinivasa, K.; Levis, P. RSSI is under Appreciated [C/OL]. In Proceedings of the 3rd Workshop on Embedded Networded Sensors (EmNets 2006), Cambridge, MA, USA, 2006. [Google Scholar]
- Ganesh, S.; Amutha, R. Efficient and secure routing protocol for wireless sensor networks through SNR based dynamic clustering mechanisms. J. Commun. Netw. 2013, 15, 422–429. [Google Scholar] [CrossRef]
- Liang, J.J.; Yuan, Z.W.; Lei, J.J.; Kwon, G.I. Reliable routing algorithm on wireless sensor network. In Proceedings of the 2010 The 12th International Conference on Advanced Communication Technology (ICACT), Phoenix Park, Korea, 7–10 February 2010; Volume 1, pp. 47–51. [Google Scholar]
- Gnawali, O.; Fonseca, R.; Jamieson, K.; Moss, D.; Levis, P. Collection tree protocol. In Proceedings of the ACM SenSys, Berkeley, CA, USA, 4–6 November 2009. [Google Scholar]
- Fonseca, R.; Gnawali, O.; Jamieson, K.; Levis, P. Four-Bit Wireless Link Estimation. In Proceedings of the ACM HotNets-VI, Atlanta, GA, USA, 14–15 November 2007. [Google Scholar]
- Jakllari, G.; Eidenbenz, S.; Hengartner, N.; Krishnamurthy, S.V.; Faloutsos, M. Link positions matter: A noncommutative routing metric for wireless mesh networks. IEEE Trans. Mob. Comput. 2012, 11, 61–72. [Google Scholar] [CrossRef]
- Zhang, H.; Sang, L.; Arora, A. Comparison of data-driven link estimation methods in low-power wireless networks. IEEE Trans. Mob. Comput. 2010, 9, 1634–1648. [Google Scholar] [CrossRef]
- Liu, M.; Cao, J.; Chen, G.; Wang, X. An energy-aware routing protocol in wireless sensor networks. Sensors 2009, 9, 445–462. [Google Scholar] [CrossRef] [PubMed]
- Hassanein, H.; Luo, J. Reliable energy aware routing in wireless sensor networks. In Proceedings of the 2006 Second IEEE Workshop on IEEE Dependability and Security in Sensor Networks and Systems, Columbia, MD, USA, 24–28 April 2006; pp. 54–64. [Google Scholar]
- Moeller, S.; Sridharan, A.; Krishnamachari, B.; Gnawali, O. Routing without routes: The backpressure collection protocol. In Proceedings of the 9th ACM/IEEE International Conference on Information Processing in Sensor Networks, Stockholm, Sweden, 12–16 April 2010; pp. 279–290. [Google Scholar]
- Paine, R.T.; Fenchel, T.; Kinne, O. Marine Rocky Shores and Community Ecology: An Experimentalist’s Perspective; JSTOR: New York, NY, USA, 1994; Volume 4. [Google Scholar]
- Kish, N.E.; Helmuth, B.; Wethey, D.S. Physiologically grounded metrics of model skill: A case study estimating heat stress in intertidal populations. Conserv. Physiol. 2016, 4. [Google Scholar] [CrossRef] [PubMed]
- Lima, F.P.; Burnett, N.P.; Helmuth, B.; Kish, N.; Aveni-Deforge, K.; Wethey, D.S. Monitoring the Intertidal Environment with Biomimetic Devices; InTech: Moskva, Russia, 2011. [Google Scholar]
- Helmuth, B.; Broitman, B.R.; Yamane, L.; Gilman, S.E.; Mach, K.; Mislan, K.A.S.; Denny, M.W.; Barnes, B.; Gordon, M.; Sato, K. Organismal climatology: Analyzing environmental variability at scales relevant to physiological stress. J. Exp. Biol. 2010, 213, 995–1003. [Google Scholar] [CrossRef] [PubMed]
- Juang, P.; Oki, H.; Wang, Y.; Martonosi, M.; Peh, L.S.; Rubenstein, D. Energy-efficient computing for wildlife tracking: Design tradeoffs and early experiences with ZebraNet. ACM Sigplan Not. 2002, 37, 96–107. [Google Scholar] [CrossRef]
- Liu, Y.; He, Y.; Li, M.; Wang, J.; Liu, K.; Li, X. Does wireless sensor network scale? A measurement study on GreenOrbs. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 1983–1993. [Google Scholar] [CrossRef]
- Liu, G.; Tan, R.; Zhou, R.; Xing, G.; Song, W.Z.; Lees, J.M. Volcanic earthquake timing using wireless sensor networks. In Proceedings of the ACM IPSN, Philadelphia, PA, USA, 8–11 April 2013. [Google Scholar]
- De Couto, D.S.; Aguayo, D.; Bicket, J.; Morris, R. A high-throughput path metric for multi-hop wireless routing. Wirel. Netw. 2005, 11, 419–434. [Google Scholar] [CrossRef]
- Walker, S.H.; Duncan, D.B. Estimation of the probability of an event as a function of several independent variables. Biometrika 1967, 54, 167–179. [Google Scholar] [CrossRef] [PubMed]
- Freund, Y.; Schapire, R.E. A desicion-theoretic generalization of on-line learning and an application to boosting. In Proceedings of the European Conference on Computational Learning Theory, Barcelona, Spain, 13–15 March 1995; Springer: Berlin, Germany, 1995; pp. 23–37. [Google Scholar]
- John, G.H.; Langley, P. Estimating continuous distributions in Bayesian classifiers. In Proceedings of the Eleventh Conference on Uncertainty in Artificial Intelligence, Montreal, QU, Canada, 18–20 August 1995; Morgan Kaufmann Publishers Inc.: Burlington, MA, USA, 1995; pp. 338–345. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The physical distance between and . | |
| Transmission range. | |
| Physical connection between and . | |
| The expected transmission times of . | |
| Delay introduced by at time t | |
| Delay introduced by at time t | |
| Current status of at time t; is available at time t if and vice versa. | |
| The predicted status of at time . | |
| The number of packets buffered in at time t. | |
| The number of packets can be sent by at time t in a cycle. | |
| The limit of retransmission times in a cycle. | |
| T | The time interval of a system cycle. The basic time unit of delay. |
| Protocol | Metric | The Calculation of Metric |
|---|---|---|
| Pido | ||
| CTP | ETX (Expected Transmissions) | Calculated by a Link Quality Estimator |
| ORW | EDC (Expected Duty Cycled wakeups) | * |
| Parameters | Description |
|---|---|
| Network Size | The number of nodes in the network. In our simulation, we set the network sizes vary from 49, 81, 121, 169 and 225. |
| Tidal Period | The time duration of a tidal period. In our simulation, we set the tidal period vary from 60, 120, 180, 240, 300, 360 cycles. |
| Network Size | Average Under-Water Time | Average Delay (Cycle) 1 | Energy Consumption 2 | |
|---|---|---|---|---|
| Field Test with Pido | 27 nodes | 458 cycles | 93.9 | 35.6 |
| Field Test without Pido | 27 nodes | 458 cycles | 374 | 37 |
| Simulation | 27 nodes | 458 cycles | 72.8 | 32.2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Ji, X.; Wang, B.; Cheng, Y.; Ma, Z.; Choi, F.; Helmuth, B.; Xu, W. Pido: Predictive Delay Optimization for Intertidal Wireless Sensor Networks. Sensors 2018, 18, 1464. https://doi.org/10.3390/s18051464
Zhou X, Ji X, Wang B, Cheng Y, Ma Z, Choi F, Helmuth B, Xu W. Pido: Predictive Delay Optimization for Intertidal Wireless Sensor Networks. Sensors. 2018; 18(5):1464. https://doi.org/10.3390/s18051464
Chicago/Turabian StyleZhou, Xinyan, Xiaoyu Ji, Bin Wang, Yushi Cheng, Zhuoran Ma, Francis Choi, Brian Helmuth, and Wenyuan Xu. 2018. "Pido: Predictive Delay Optimization for Intertidal Wireless Sensor Networks" Sensors 18, no. 5: 1464. https://doi.org/10.3390/s18051464
APA StyleZhou, X., Ji, X., Wang, B., Cheng, Y., Ma, Z., Choi, F., Helmuth, B., & Xu, W. (2018). Pido: Predictive Delay Optimization for Intertidal Wireless Sensor Networks. Sensors, 18(5), 1464. https://doi.org/10.3390/s18051464