Development of a Wireless Unified-Maintenance System for the Structural Health Monitoring of Civil Structures


Abstract
:1. Introduction
2. The Design of the Wireless Unified-Maintenance System
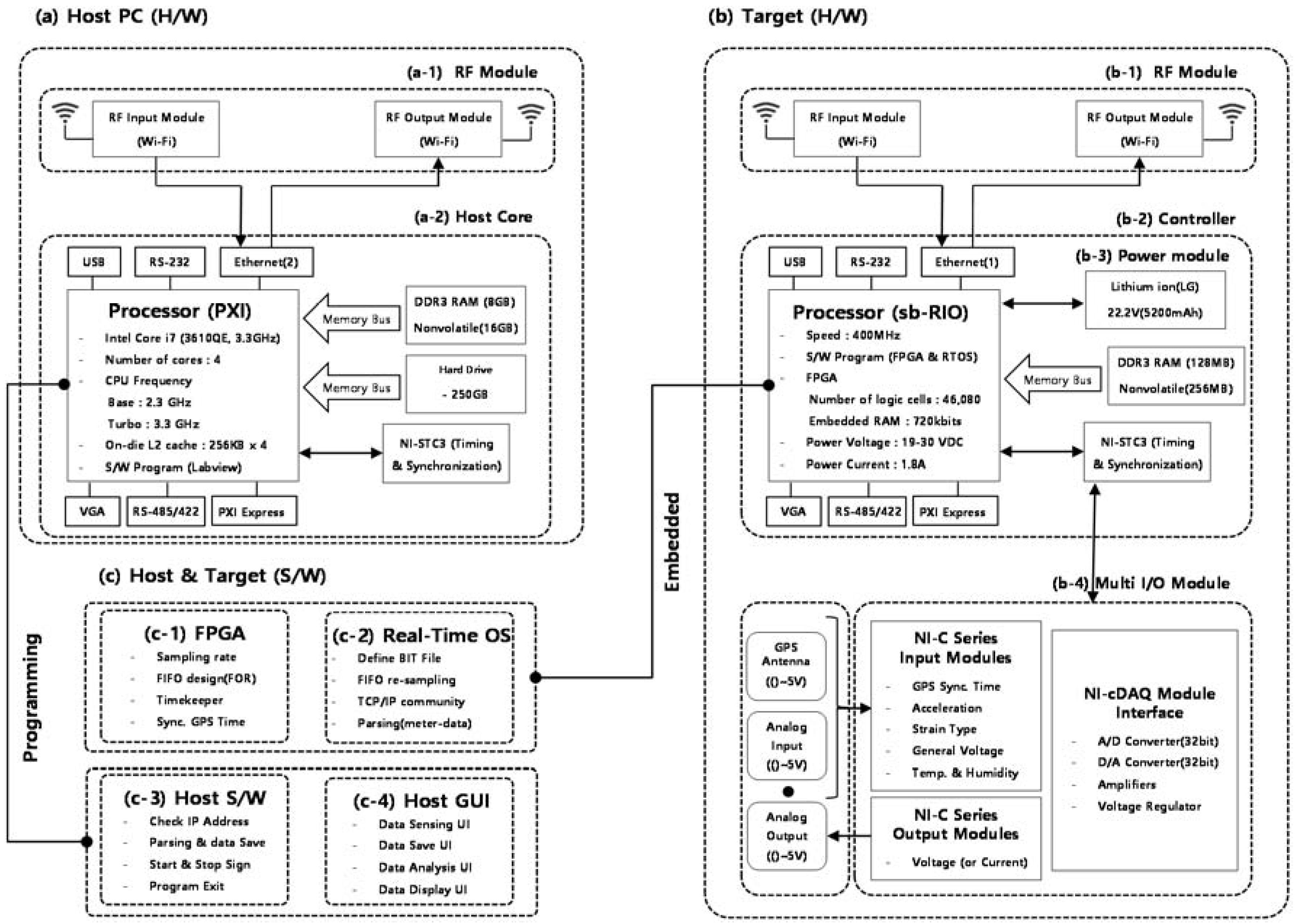
2.1. Hardware Design of the WUMS
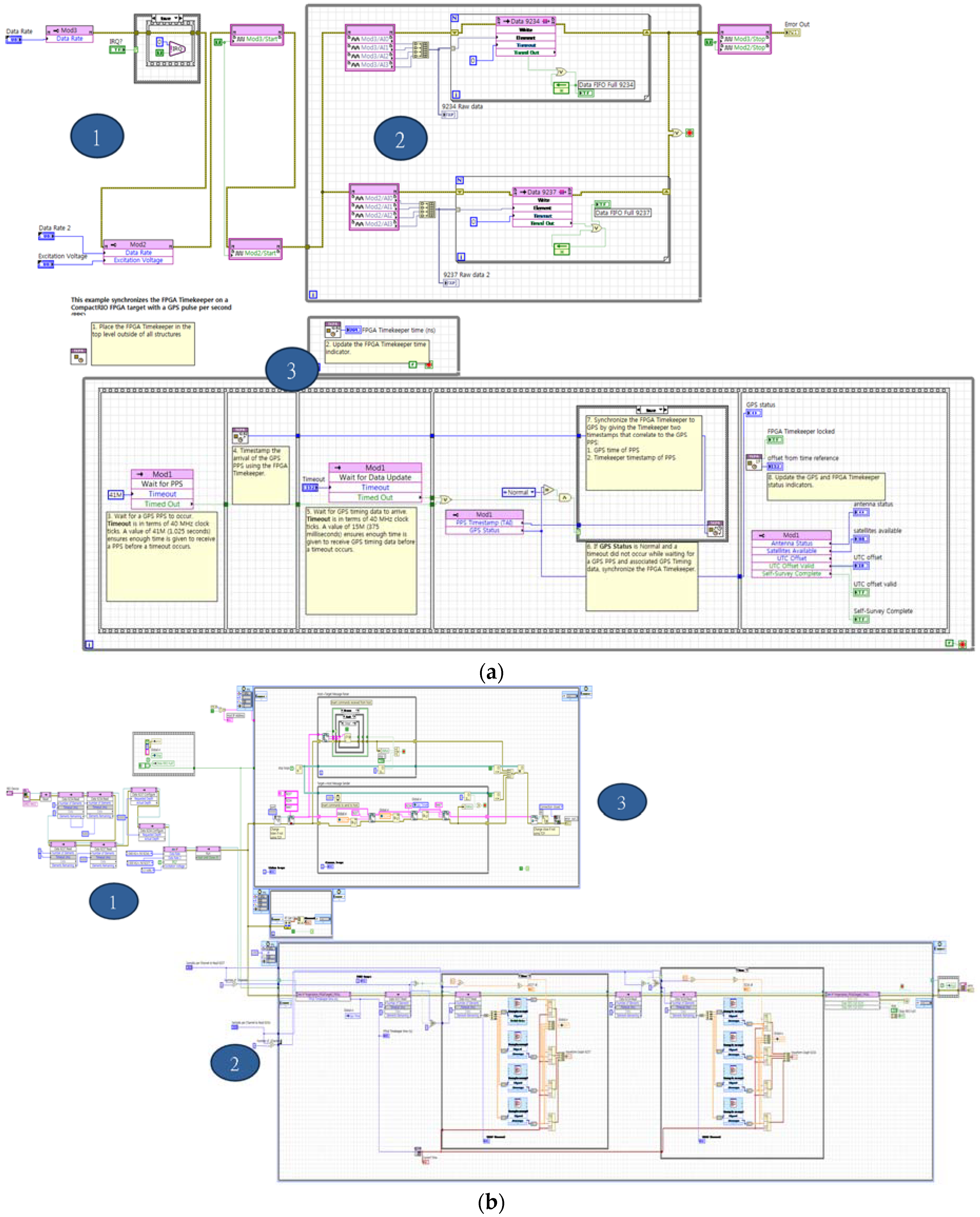
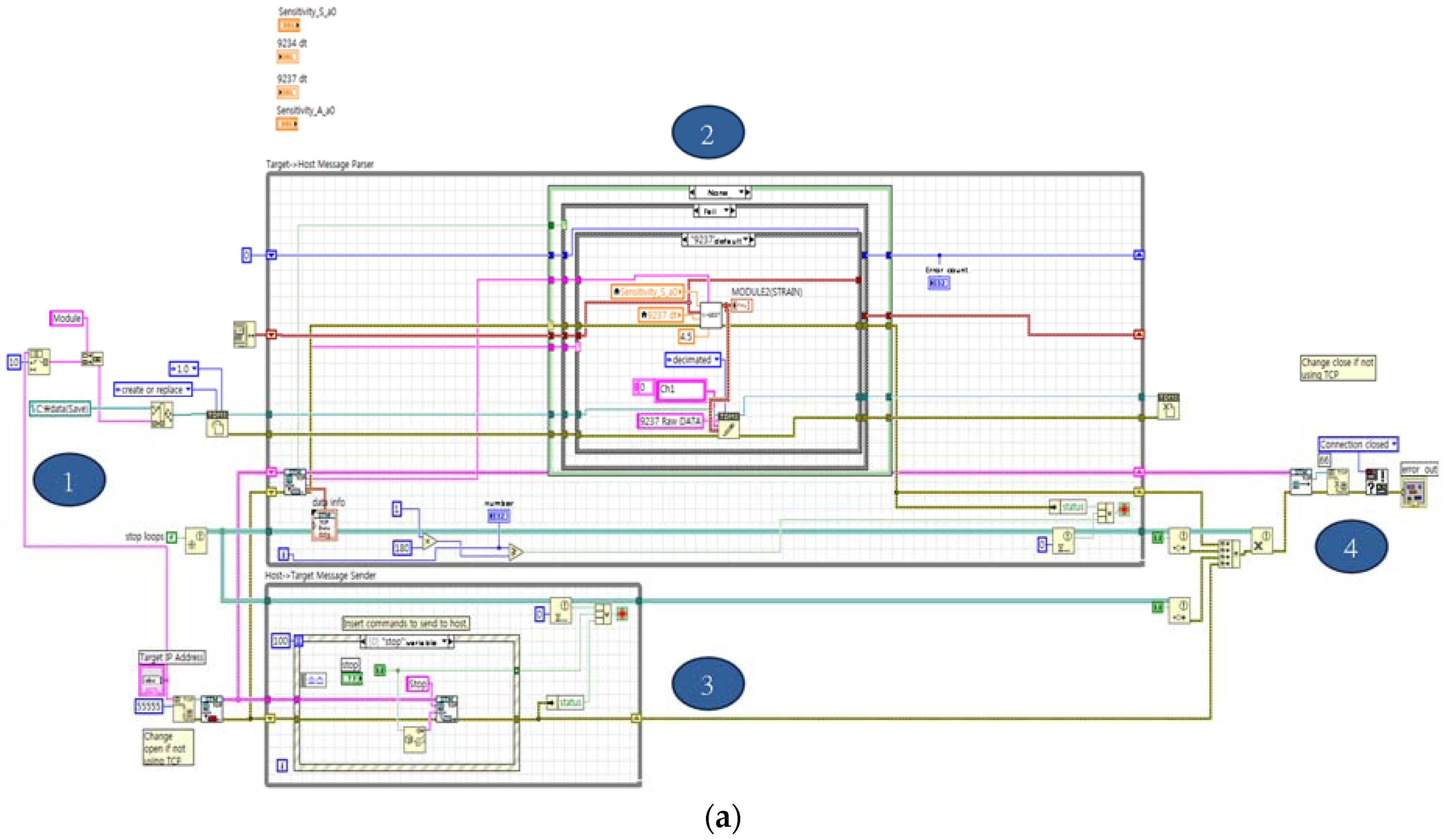
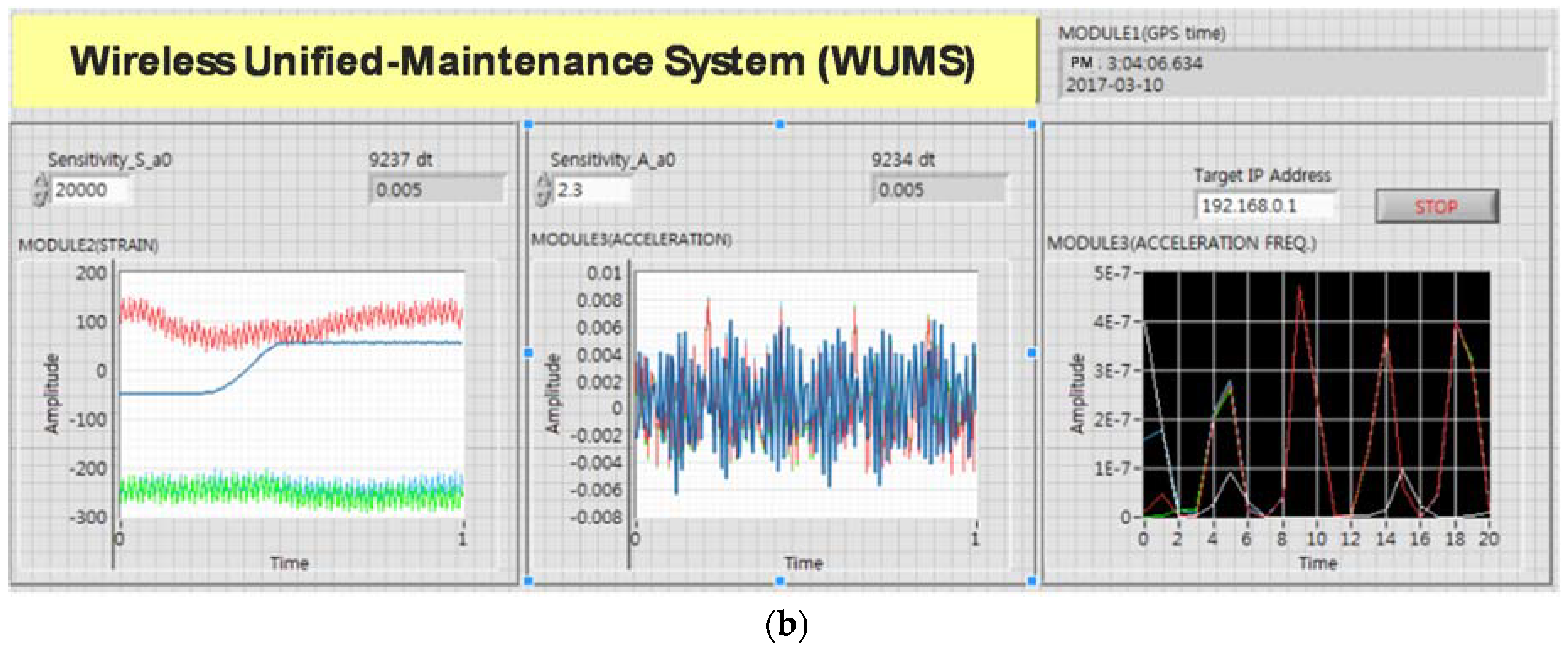
2.2. Software Design of the WUMS
3. Evaluation Experiments of the WUMS
3.1. Wireless Communication Distance on Open Field
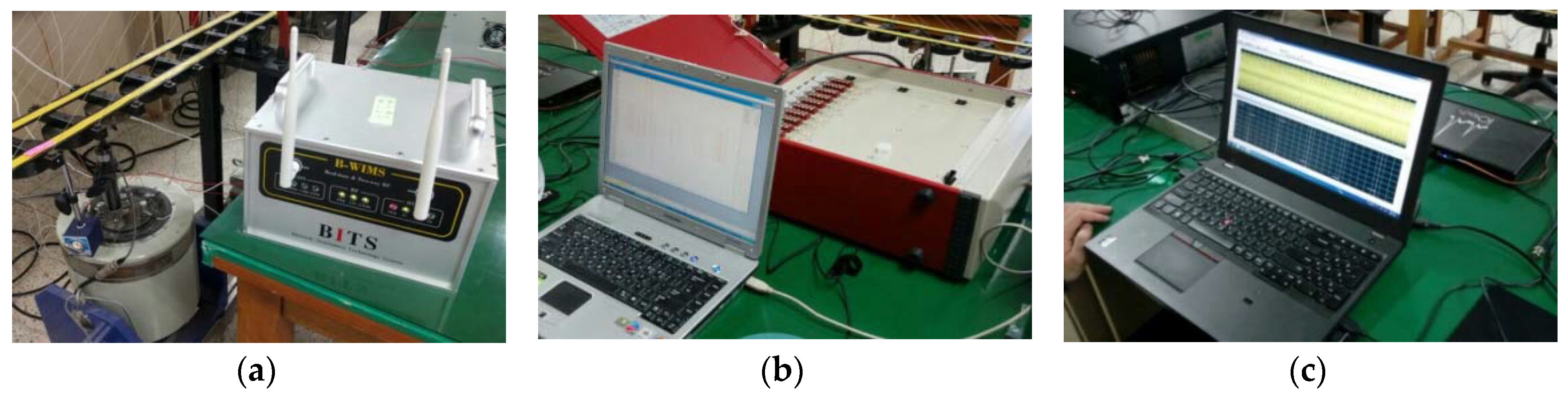
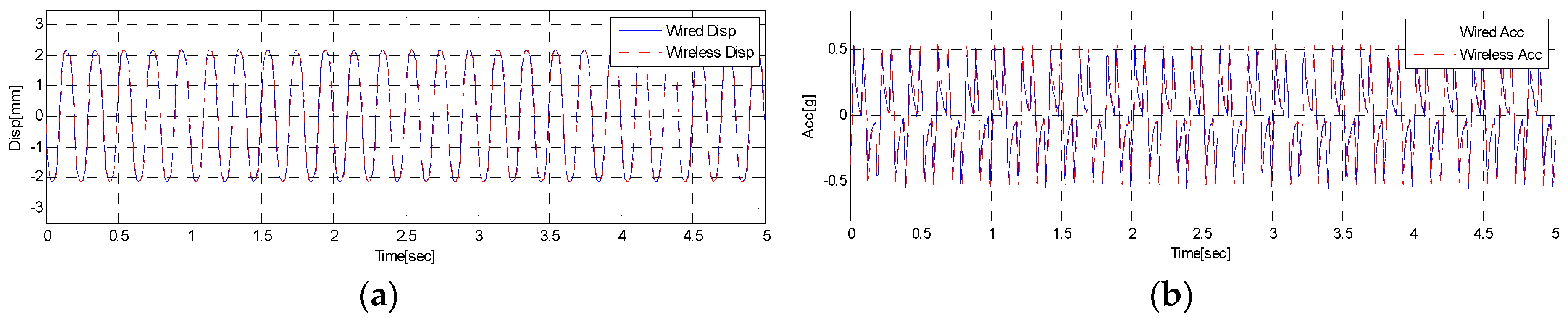
3.2. Response Tests Using a Modal Shaker
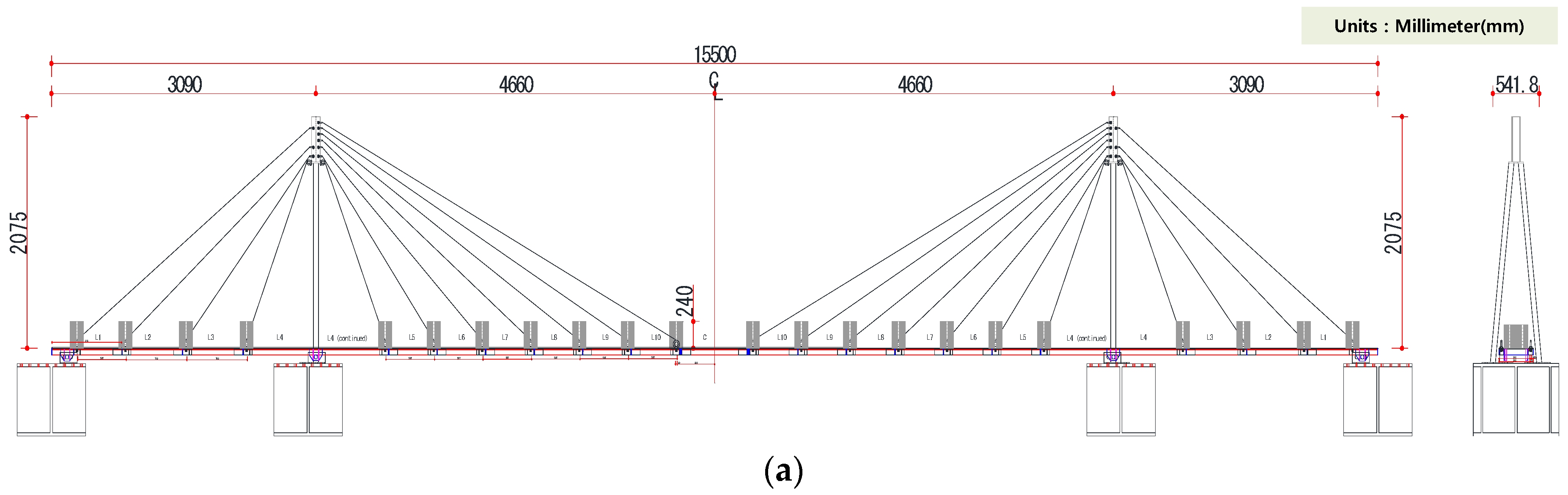
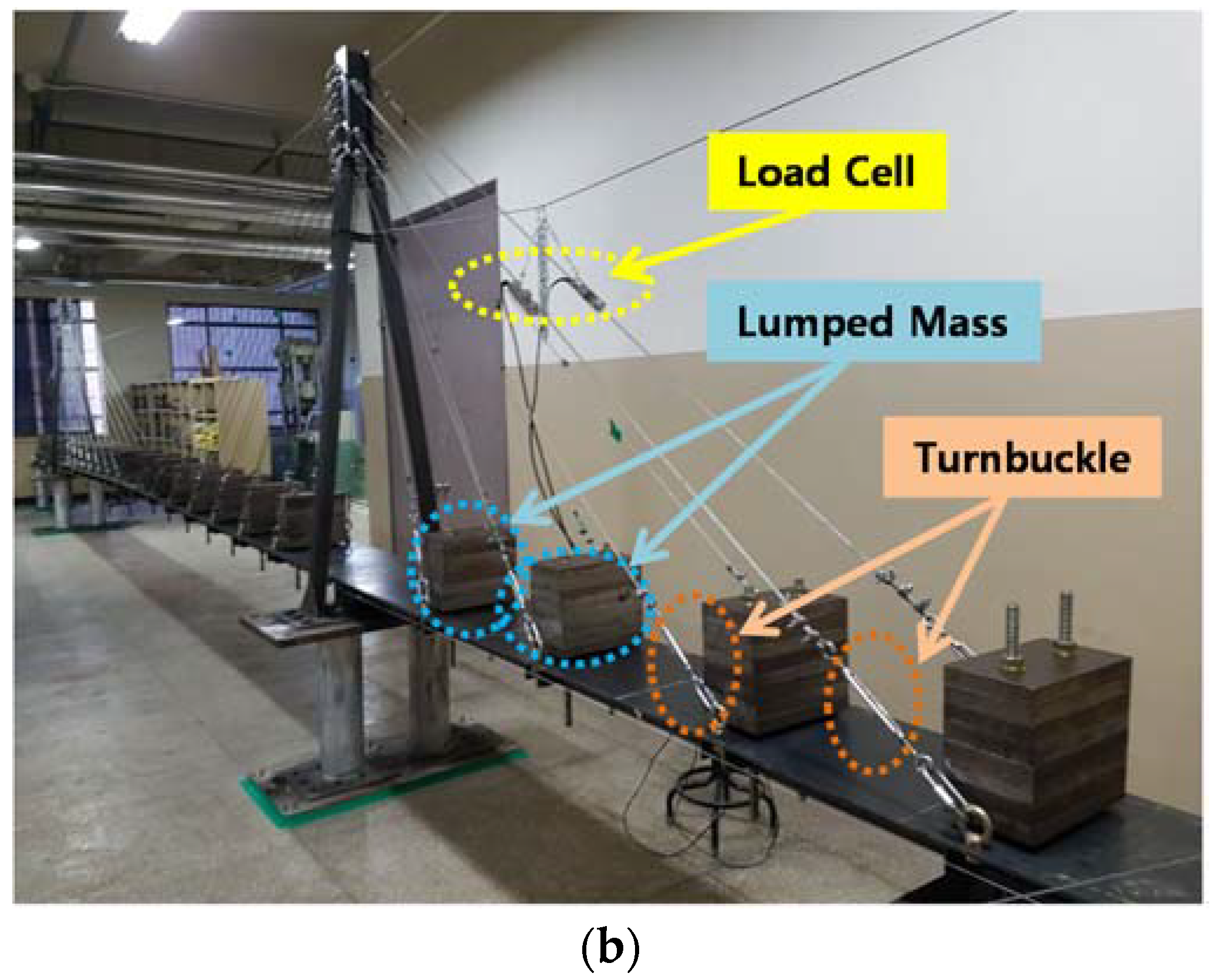
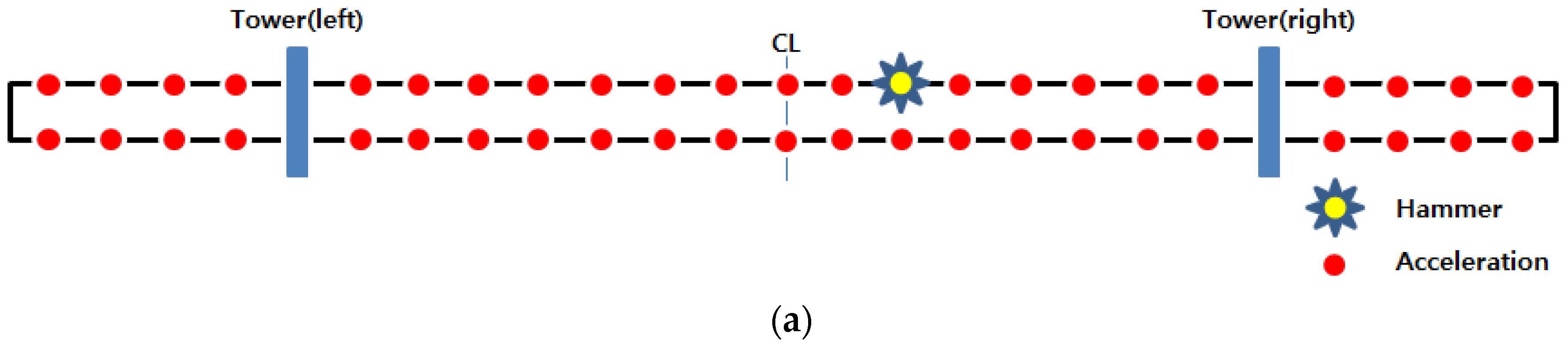
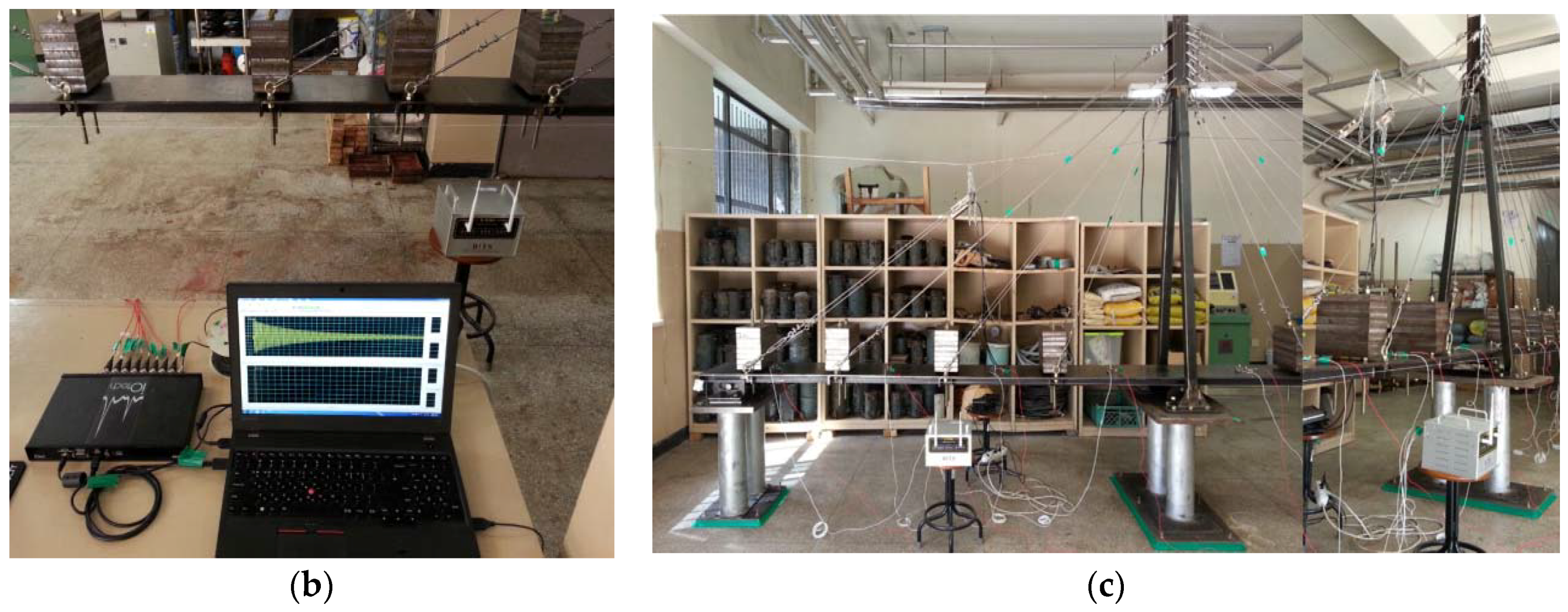
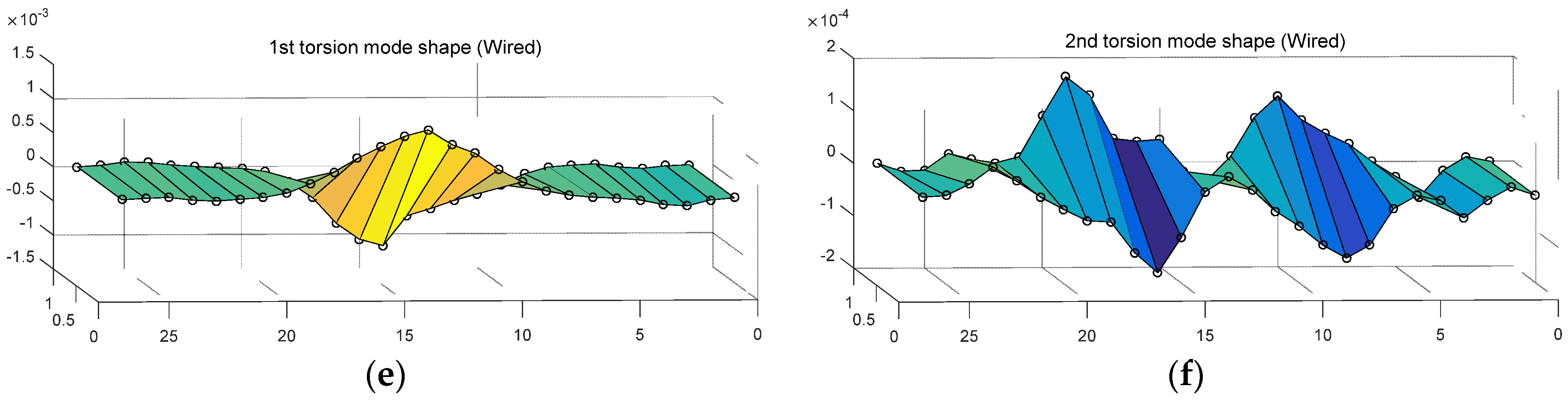
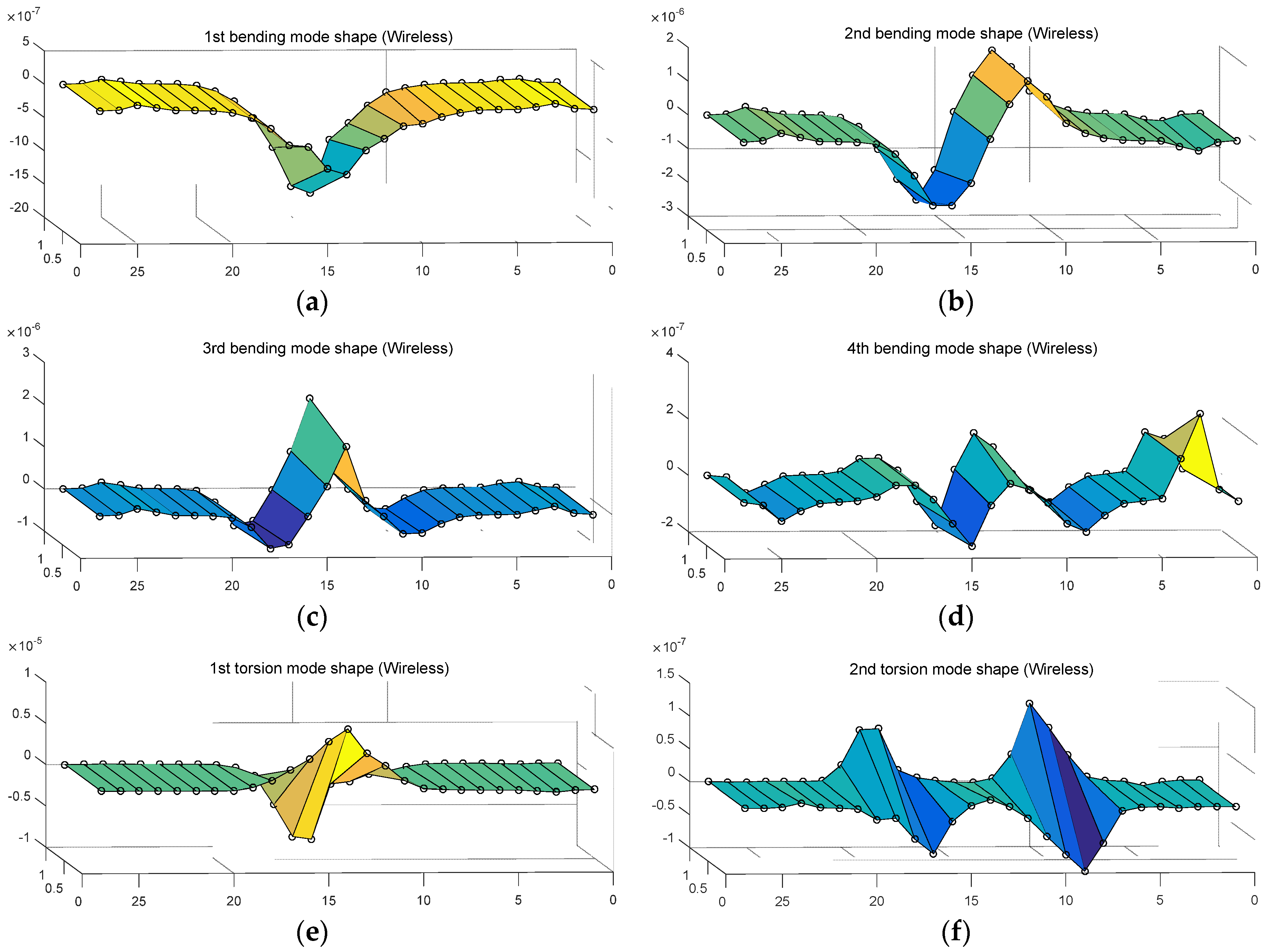
3.3. Modal Test on a Model Bridge
4. Conclusions
- (1)
- According to the wireless communication distance test in an open field, the WUMS was able to graps signals far up to 500 m at WiFi 2.4 GHz and also up to 800 m at WiFi 5.0 GHz. After all, the WUMS is proven to perform a SHM using the wireless technology at a short range (within 500 m) even with obstacles at WiFi 2.4 GHz. It is also found that it can work as a SHM using the wireless technology in the distance (within 800 m) when linearity is relatively guaranteed without any obstacles at WiFi 5 GHz.
- (2)
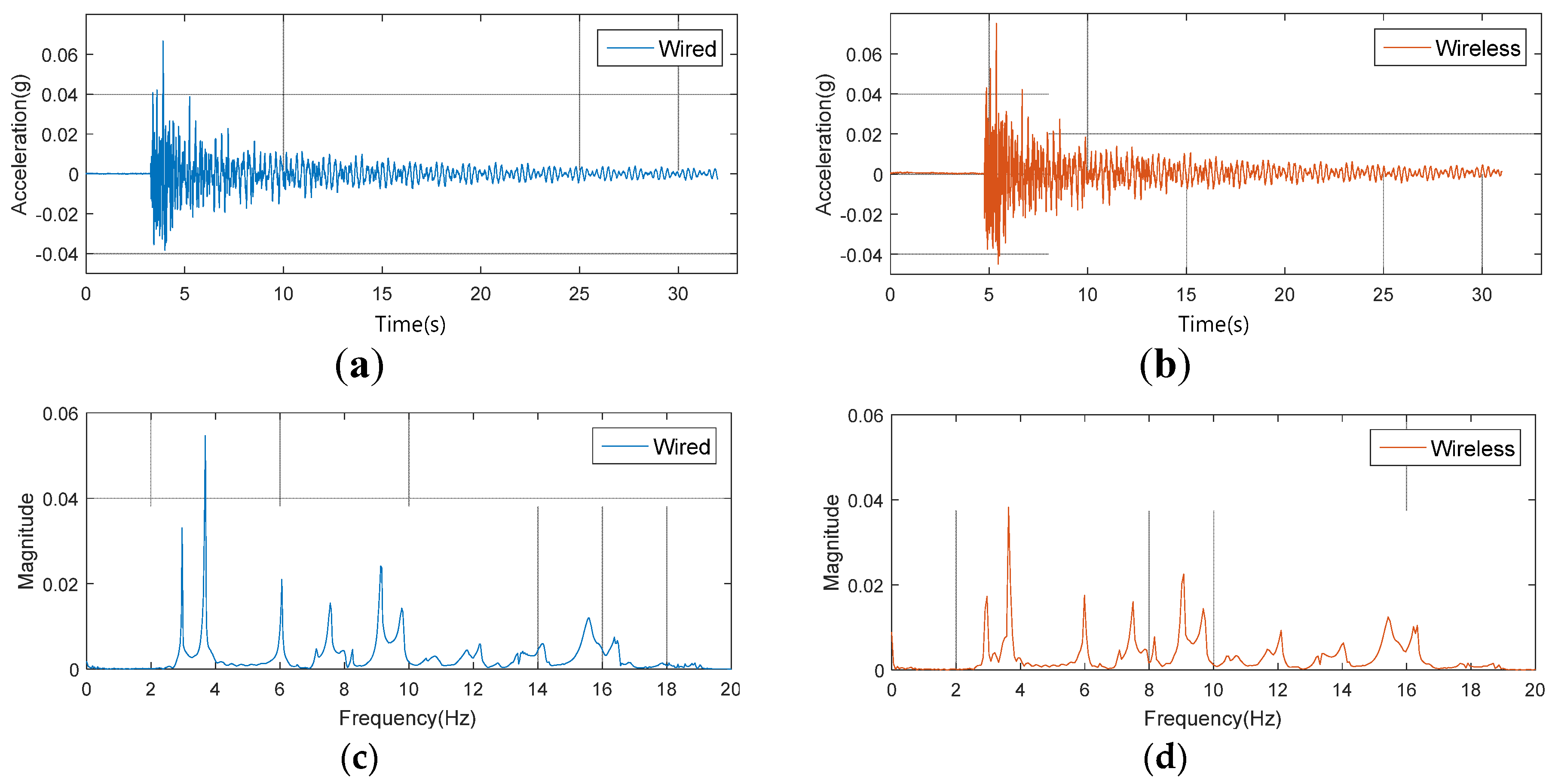
- From the response test using a modal shaker, the WUMS was able to acquire multiple responses (e.g., acceleration, displacement, strain, etc.) simultaneously using the wireless communication through a single data logger. The acquired wireless responses were matched to a large degree with wired responses so that they were valid for wireless data loggers for a SHM.
- (3)
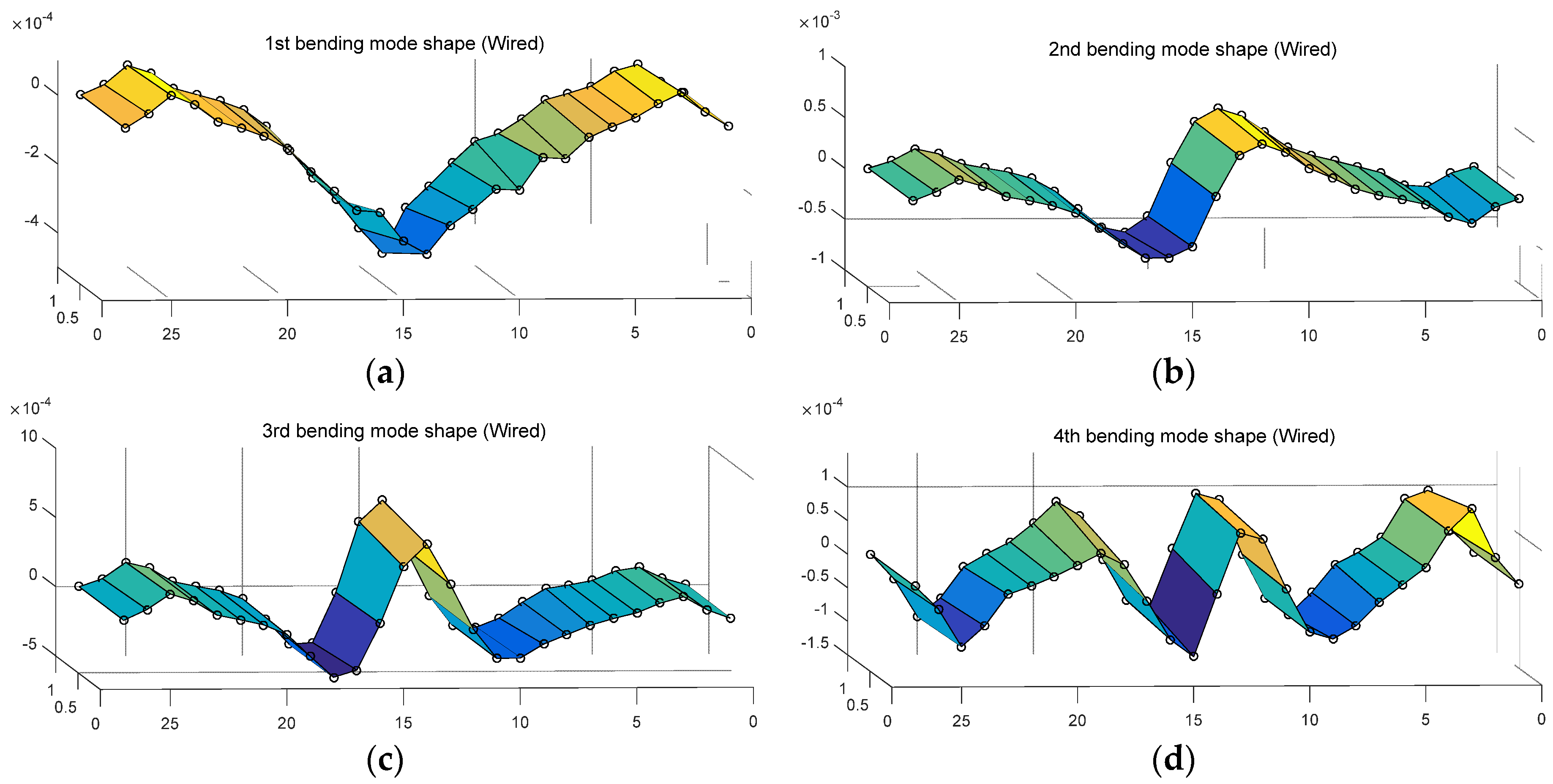
- According to the model bridge-based modal test, the WUMS was able to get valid dynamic responses with 0.8 or higher in modal correlation with about 2.7% error rates of natural frequency compared to wired responses in realtime.
- (4)
- In addition, the WUMS developed in this study has its own power source for nearly 48 hours with a Li-ion battery. In addition, the adoption of the FPGA-based high-performance controller, which provides a three slotted I/O, enables a measurement of multi-channel responses when the same measurement models are used as well as the measurement of multiple responses including GPS. Since the FPGA programming is available, the system could be operated in standalone mode in a stable manner on the basis of RTOS.
- (5)
- There will be further studies on practicality by applying the WUMS to real structures. In addition, the studies on SHM will continue, specially using the structural responses wirelessly obtained in realtime such as GPS information and multiple responses.
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| SHM | Structural Health Monitoring |
| WUMS | Wireless Unified-Maintenance System |
| EST | Embedded Software Technology |
| FPGA | Field Programmable Gate Array |
| RTOS | Real-Time Operating System |
| GUI | Graphical User Interface |
| FIFO | First-in First-out |
| DAQ | Data Acquisition |
| RF | Radio Frequency |
| AP | Access Point |
| I/O | Input and Output |
| FRF | Frequency Response Function |
| MAC | Modal Assurance Criteria |
References
- Doebling, S.W.; Farrar, C.R.; Prime, M.B. A summary review of vibration-based damage identification methods. Shock Vib. Dig. 1998, 30, 91–105. [Google Scholar] [CrossRef]
- Ge, M.; Liu, E.M. Structural damage identification using system dynamic properties. Comput. Struct. 2005, 83, 2185–2196. [Google Scholar] [CrossRef]
- Giraldo, D.F.; Dyke, S.J.; Caicedo, J.M. Damage detection accommodating varying environmental conditions. Struct. Health Monit. Int. J. 2006, 5, 155–172. [Google Scholar] [CrossRef]
- Ko, J.M.; Ni, Y.Q. Technology developments in structural health monitoring of large-scale bridges. Eng. Struct. 2005, 27, 1715–1725. [Google Scholar] [CrossRef]
- Caicedo, J.M.; Dyke, S.J. Experimental validation of structural health monitoring for flexible bridge structures. Struct. Control Health Monit. 2005, 12, 425–443. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Na, W.S. Impedance-based Non-Destructive Testing Method Combined with Unmanned Aerial Vehicle for Structural Health Monitoring of Civil Infrastructures. Appl. Sci. 2017, 17, 15. [Google Scholar] [CrossRef]
- Cross, E.J.; Koo, K.Y.; Brownjohn, J.M.W.; Worden, K. Long-term monitoring and data analysis of the Tamar Bridge. Mech. Syst. Signal Process. 2013, 35, 16–34. [Google Scholar] [CrossRef] [Green Version]
- Alamdari, M.M.; Samali, B.; Li, J.; Kalhori, H.; Mustapha, S. Spectral-based damage identification in structures under ambient vibration. J. Comput. Civ. Eng. 2015, 30. [Google Scholar] [CrossRef]
- Dworakowski, Z.; Kohut, P.; Gallina, A.; Holak, K.; Uhl, T. Vision-based algorithms for damage detection and localization in structural health monitoring. Struct. Control Health Monit. 2016, 23, 35–50. [Google Scholar] [CrossRef]
- Heo, G.; Jeon, J. A Smart Monitoring System Based on Ubiquitous Computing Technique for Infra-structural System: Centering on Identification of Dynamic Characteristics of Self-Anchored Suspension Bridge. KSCE J. Civ. Eng. 2009, 13, 333–337. [Google Scholar] [CrossRef]
- Alamdari, M.M.; Rakotoarivelo, T.; Khoa, N.L.D. A spectral-based clustering for structural health monitoring of the Sydney Harbour Bridge. Mech. Syst. Signal Process. 2017, 87, 384–400. [Google Scholar] [CrossRef]
- Straser, E.G.; Kiremidjian, A.S.; Meng, T.H.; Redlefsen, L. A modular, Wireless Network platform for monitoring structures. Proc. SPIE Int. Soc. Opt. Eng. 1998, 3243, 450–456. [Google Scholar] [CrossRef]
- Spencer, B.F.; Ruiz-Sandoval, M.E.; Kurata, N. Smart sensing technology: Opportunities and challenges. J. Struct. Control Health Monit. 2004, 11, 349–368. [Google Scholar] [CrossRef]
- Lynch, J.P.; Loh, K.J. A summary review of wireless sensors and sensor networks for structural health monitoring. Shock Vib. Dig. 2006, 28, 91–126. [Google Scholar] [CrossRef]
- Rice, J.A.; Spencer, B.F. Structural health monitoring sensor development for the Imote2 platform. Proc. SPIE Int. Soc. Opt. Eng. 2008, 6932. [Google Scholar] [CrossRef]
- Nagayama, T.; Spencer, B.F.; Mechitov, K.A.; Agha, G.A. Middleware services for structural health monitoring using smart sensors. Smart Struct. Syst. 2009, 5, 119–137. [Google Scholar] [CrossRef]
- Jang, S.; Jo, H.; Cho, S.; Mechitov, K.; Rice, J.A.; Sim, S.H.; Jung, H.J.; Yun, C.B.; Spencer, B.F.; Agha, G. Structural health monitoring of a cable-stayed bridge using smart sensor technology: Deployment and evaluation. Smart Struct. Syst. 2010, 6, 439–459. [Google Scholar] [CrossRef]
- Nagayama, T.; Sim, S.H.; Miyamori, Y.; Spencer, B.F. Issues in structural health monitoring employing smart sensors. Smart Struct. Syst. 2007, 3, 299–320. [Google Scholar] [CrossRef]
- Heo, G.; Jeon, J. A Study on the Data Compression Technology-Based Intelligent Data Acquisition (IDAQ) System for Structural Health Monitoring of Civil Structures. Sensors 2017, 17, 1620. [Google Scholar] [CrossRef] [PubMed]
- Park, J.-W.; Sim, S.-H.; Jung, H.-J.; Spencer, B.F. Development of a Wireless Displacement Measurement System Using Acceleration Responses. Sensors 2013, 13, 8377–8392. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Microstrain Inc. Wireless System Networks | Microstrain. 2012. Available online: http://www.microstrain.com/wireless/systems (accessed on 20 April 2018).
- Bridge Diagnostics Inc. STS WiFi Wireless Structural Testing System; Bridge Diagnostics Inc.: Boulder, CO, USA, 2012. [Google Scholar]
- National Instruments Inc. Wireless Measurement Device Selection Guide. 2012. Available online: http://sine.ni.com/np/app/main/p/ap/global/lang/en/pg/1/sn/n24:Wireless/fmid/2988/ (accessed on 20 April 2018).
- Ewins, D.J. Modal Testing: Theory, Practice and Application; Research Studies Press Ltd.: England, UK, 2000; ISBN 0-86380-218-4. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2.4 GHz | 100 m | 200 m | 300 m | 400 m | 500 m | 600 m | 700 m | 800 m | 900 m | 1 km |
|---|---|---|---|---|---|---|---|---|---|---|
| Test 1 | 89% | 83% | 77% | 74% | 74% | - | - | - | - | - |
| Test 2 | 89% | 79% | 75% | 73% | 72% | - | - | - | - | - |
| Test 3 | 86% | 75% | 75% | 71% | 68% | - | - | - | - | - |
| Test 4 | 89% | 75% | 75% | 71% | 70% | - | - | - | - | - |
| Test 5 | 85% | 77% | 74% | 73% | 70% | - | - | - | - | - |
| Wirelss Comm. | O | O | O | O | O | X | X | X | X | X |
| Where “O” and “X” indicate the success and failure of wireless communication. | ||||||||||
| 5 GHz | 100 m | 200 m | 300 m | 400 m | 500 m | 600 m | 700 m | 800 m | 900 m | 1 km |
|---|---|---|---|---|---|---|---|---|---|---|
| Test 1 | 100% | 80% | 67% | 64% | 64% | 60% | 57% | 70% | - | - |
| Test 2 | 98% | 77% | 68% | 62% | 62% | 61% | 60% | 60% | - | - |
| Test 3 | 98% | 90% | 67% | 64% | 64% | 62% | 62% | 60% | - | - |
| Test 4 | 95% | 80% | 66% | 62% | 62% | 58% | 57% | 60% | - | - |
| Test 5 | 99% | 78% | 68% | 63% | 63% | 62% | 61% | 61% | - | - |
| Wireless Comm. | O | O | O | O | O | O | O | O | X | X |
| Where “O” and “X” indicate the success and failure of wireless communication. | ||||||||||
| Mode | Wired (Hz) | Wireless (Hz) | Error (%) |
|---|---|---|---|
| 1st Bending | 2.94 | 3.02 | 2.721 |
| 2nd Bending | 3.63 | 3.75 | 3.305 |
| 3rd Bending | 6.01 | 6.16 | 2.495 |
| 4th Bending | 7.05 | 7.22 | 2.411 |
| 1st Torsion | 8.21 | 8.41 | 2.436 |
| 2nd Torsion | 10.5 | 10.8 | 2.857 |
| Average | 2.704 |
| Wired | 1st Bending | 2nd Bending | 3rd Bending | 4th Bending | 1st Torsion | 2nd Torsion | |
|---|---|---|---|---|---|---|---|
| Wireless | |||||||
| 1st Bending | 0.8780 | 0.0245 | 0.0746 | 0.0048 | 0.0208 | 0.0001 | |
| 2nd Bending | 0.0288 | 0.9193 | 0.0068 | 0.0218 | 0.0011 | 0.0013 | |
| 3rd Bending | 0.1097 | 0.0036 | 0.8572 | 0.0029 | 0.0460 | 0.0015 | |
| 4th Bending | 0.0125 | 0.0320 | 0.0587 | 0.8981 | 0.0010 | 0.0007 | |
| 1st Torsion | 0.0030 | 0.0026 | 0.0014 | 0.0194 | 0.8931 | 0.0259 | |
| 2nd Torsion | 0.0002 | 0.0025 | 0.0001 | 0.0037 | 0.0036 | 0.8211 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heo, G.; Son, B.; Kim, C.; Jeon, S.; Jeon, J. Development of a Wireless Unified-Maintenance System for the Structural Health Monitoring of Civil Structures. Sensors 2018, 18, 1485. https://doi.org/10.3390/s18051485
Heo G, Son B, Kim C, Jeon S, Jeon J. Development of a Wireless Unified-Maintenance System for the Structural Health Monitoring of Civil Structures. Sensors. 2018; 18(5):1485. https://doi.org/10.3390/s18051485
Chicago/Turabian StyleHeo, Gwanghee, Byungjik Son, Chunggil Kim, Seunggon Jeon, and Joonryong Jeon. 2018. "Development of a Wireless Unified-Maintenance System for the Structural Health Monitoring of Civil Structures" Sensors 18, no. 5: 1485. https://doi.org/10.3390/s18051485
APA StyleHeo, G., Son, B., Kim, C., Jeon, S., & Jeon, J. (2018). Development of a Wireless Unified-Maintenance System for the Structural Health Monitoring of Civil Structures. Sensors, 18(5), 1485. https://doi.org/10.3390/s18051485