Combining Fog Computing with Sensor Mote Machine Learning for Industrial IoT


Abstract
:1. Introduction
- To what extent can we save energy and reduce the number of uplink transmissions at the sensor motes, by introducing a model learned from data stream?
- Can this model be practically implemented and utilized in a fog computing architecture?
- What are the expected end-to-end delay and information query times of such a system, and can it be used in industrial scenarios?
2. Data Mining and Machine Learning in WSNs
Approach
3. Proposed Data Streams Learning and Monitoring Model
3.1. Learning and Monitoring in the Sensor Device
3.1.1. Initialization Phase
| Algorithm 1: Initialization Phase. |
 |
3.1.2. Monitoring Phase
| Algorithm 2: Monitoring Phase. |
 |
3.2. Simulation in the Fog Node
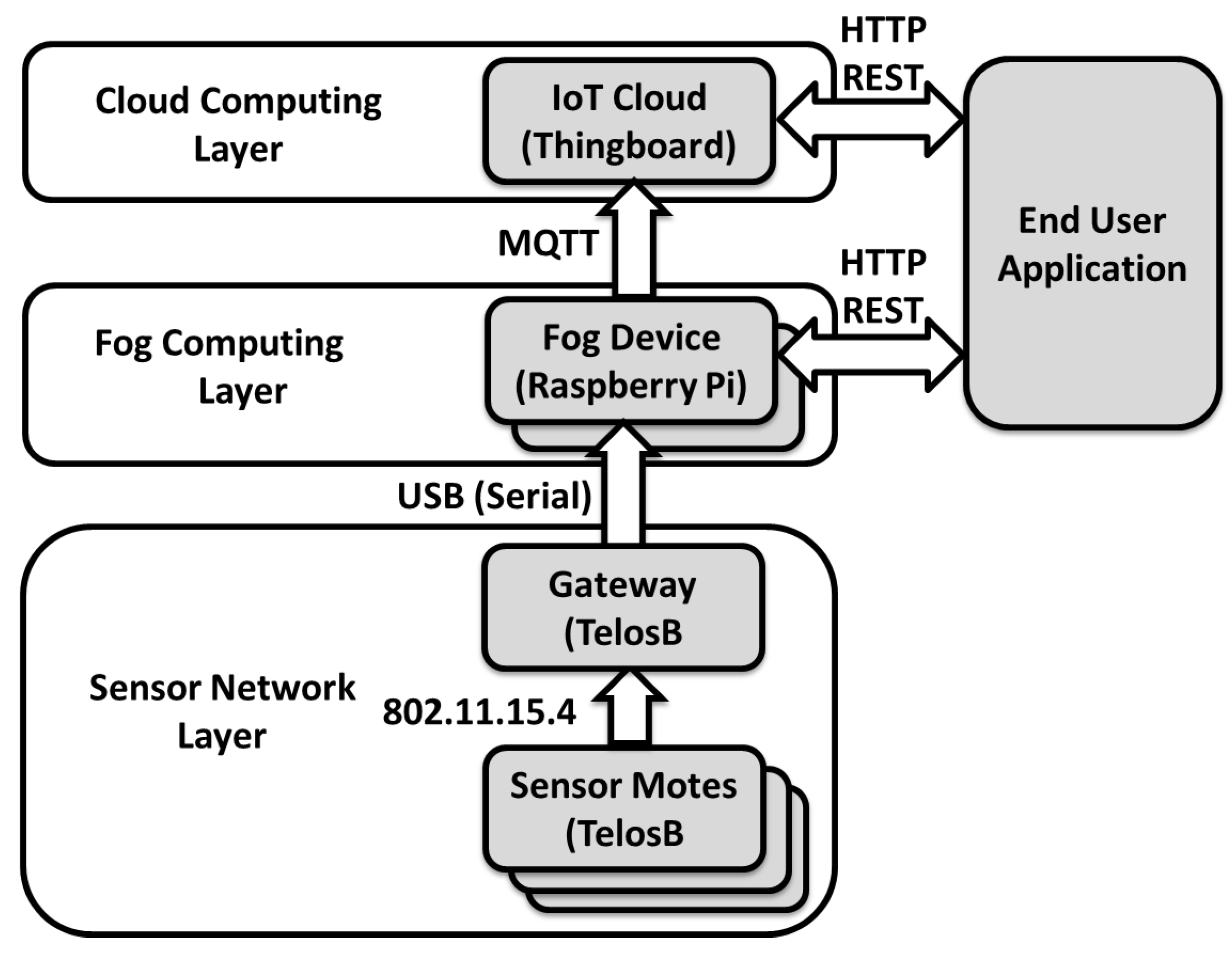
4. The Testbed System
4.1. Sensor Network Layer
4.2. Fog Computing Layer
4.3. Cloud Computing Layer
5. Materials and Methods
5.1. Hardware and Software Materials
5.2. Evaluation Methods and Setup
6. Results and Discussion
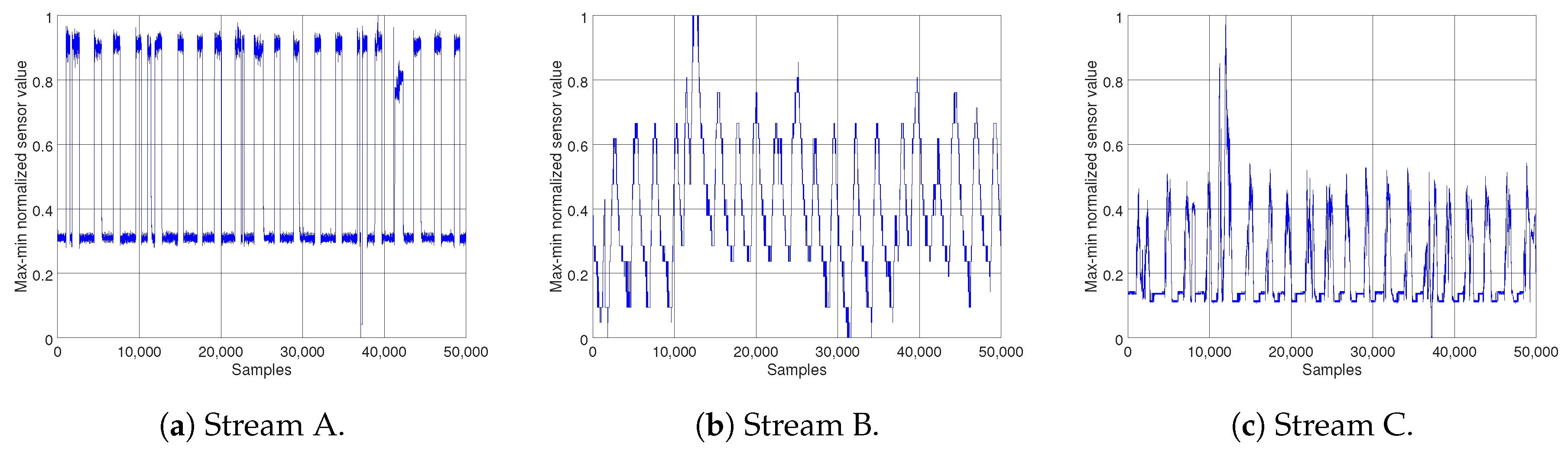
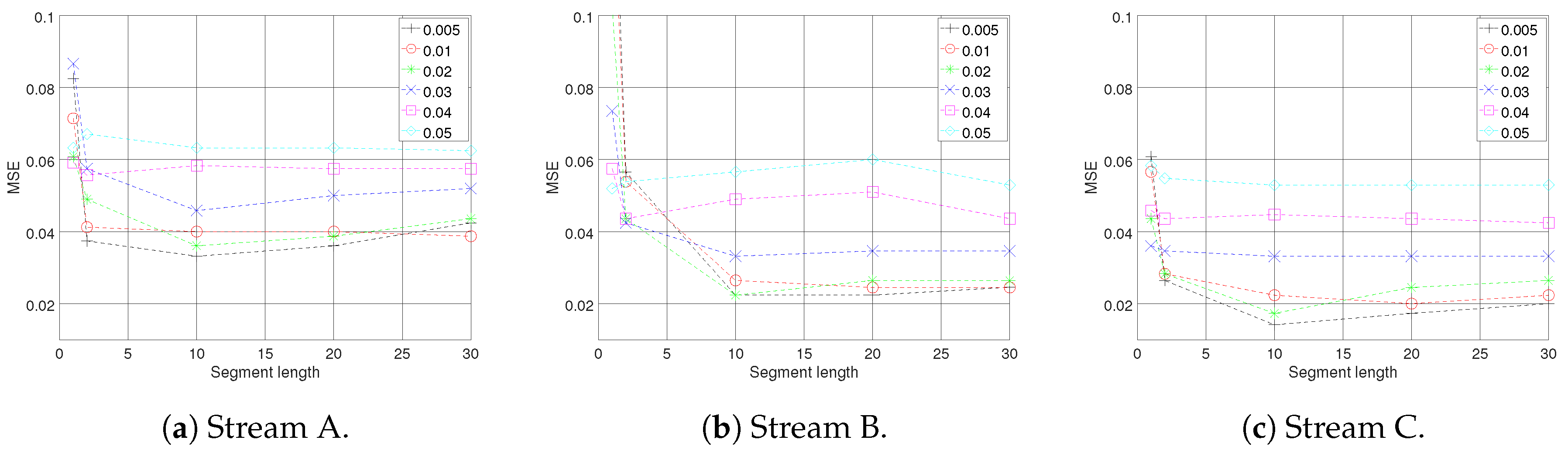
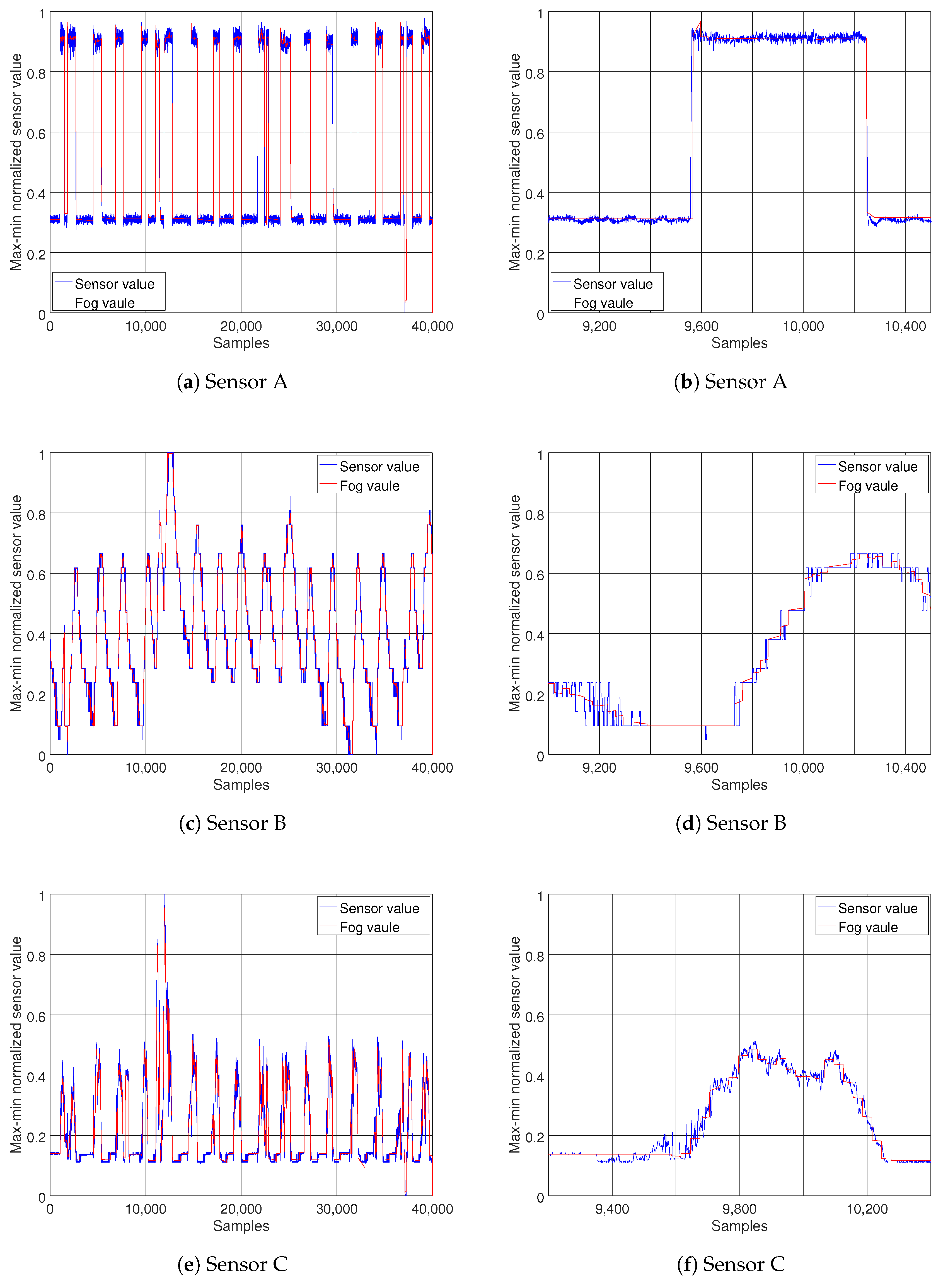
6.1. Sensor Data Experiments
6.2. Testbed Evaluation
6.3. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Da Xu, L.; He, W.; Li, S. Internet of things in industries: A survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepalli, S. Fog computing and its role in the internet of things. In Proceedings of the First Edition of the MCC Workshop on Mobile Cloud Computing, Helsinki, Finland, 13–17 August 2012; pp. 13–16. [Google Scholar]
- Han, G.; Dong, Y.; Guo, H.; Shu, L.; Wu, D. Cross-layer optimized routing in wireless sensor networks with duty cycle and energy harvesting. Wirel. Commun. Mob. Comput. 2015, 15, 1957–1981. [Google Scholar] [CrossRef]
- Rasouli, H.; Kavian, Y.S.; Rashvand, H.F. ADCA: Adaptive duty cycle algorithm for energy efficient IEEE 802.15.4 beacon-enabled wireless sensor networks. IEEE Sens. J. 2014, 14, 3893–3902. [Google Scholar] [CrossRef]
- Xie, R.; Liu, A.; Gao, J. A residual energy aware schedule scheme for WSNs employing adjustable awake/sleep duty cycle. Wirel. Pers. Commun. 2016, 90, 1859–1887. [Google Scholar] [CrossRef]
- Choudhury, N.; Matam, R.; Mukherjee, M.; Shu, L. Adaptive Duty Cycling in IEEE 802.15. 4 Cluster Tree Networks Using MAC Parameters. In Proceedings of the 18th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Chennai, India, 10–14 July 2017; p. 37. [Google Scholar]
- Huang, M.; Liu, A.; Wang, T.; Huang, C. Green data gathering under delay differentiated services constraint for internet of things. Wirel. Commun. Mob. Comput. 2018, 2018. [Google Scholar] [CrossRef]
- Azharuddin, M.; Kuila, P.; Jana, P.K. Energy efficient fault tolerant clustering and routing algorithms for wireless sensor networks. Comput. Electr. Eng. 2015, 41, 177–190. [Google Scholar] [CrossRef]
- Naranjo, P.G.V.; Shojafar, M.; Mostafaei, H.; Pooranian, Z.; Baccarelli, E. P-SEP: A prolong stable election routing algorithm for energy-limited heterogeneous fog-supported wireless sensor networks. J. Supercomput. 2017, 73, 733–755. [Google Scholar] [CrossRef]
- Oller, J.; Demirkol, I.; Casademont, J.; Paradells, J.; Gamm, G.U.; Reindl, L. Has time come to switch from duty-cycled MAC protocols to wake-up radio for wireless sensor networks? IEEE/ACM Trans. Netw. 2016, 24, 674–687. [Google Scholar] [CrossRef]
- Mahmood, A.; Shi, K.; Khatoon, S.; Xiao, M. Data mining techniques for wireless sensor networks: A survey. Int. J. Distrib. Sens. Netw. 2013, 9, 406316. [Google Scholar] [CrossRef]
- Alsheikh, M.A.; Lin, S.; Niyato, D.; Tan, H.P. Machine learning in wireless sensor networks: Algorithms, strategies, and applications. IEEE Commun. Surv. Tutor. 2014, 16, 1996–2018. [Google Scholar] [CrossRef]
- Guestrin, C.; Bodik, P.; Thibaux, R.; Paskin, M.; Madden, S. Distributed regression: an efficient framework for modeling sensor network data. In Proceedings of the 3rd International Symposium on Information Processing in Sensor Networks, Berkeley, CA, USA, 26–27 April 2004; pp. 1–10. [Google Scholar]
- Gelb, A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Abbeel, P.; Coates, A.; Montemerlo, M.; Ng, A.Y.; Thrun, S. Discriminative Training of Kalman Filters. In Proceedings of the Robotics: Science and Systems, Cambridge, MA, USA, 8–11 June 2005; Volume 2, p. 1. [Google Scholar]
- Liu, Q.; Wang, Z.; He, X.; Zhou, D. Event-based recursive distributed filtering over wireless sensor networks. IEEE Trans. Autom. Control 2015, 60, 2470–2475. [Google Scholar] [CrossRef]
- Leskovec, J.; Rajaraman, A.; Ullman, J.D. Mining of Massive Datasets; Cambridge University Press: New York, NY, USA, 2014. [Google Scholar]
- Schütz, N.; Holschneider, M. Detection of trend changes in time series using Bayesian inference. Phys. Rev. E 2011, 84, 021120. [Google Scholar] [CrossRef] [PubMed]
- Chung, F.L.; Fu, T.C.; Ng, V.; Luk, R.W. An evolutionary approach to pattern-based time series segmentation. IEEE Trans. Evolut. Comput. 2004, 8, 471–489. [Google Scholar] [CrossRef]
- Fuchs, E.; Gruber, T.; Nitschke, J.; Sick, B. Online segmentation of time series based on polynomial least-squares approximations. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 2232–2245. [Google Scholar] [CrossRef] [PubMed]
- Wang, K.; Wang, Y.; Sun, Y.; Guo, S.; Wu, J. Green industrial internet of things architecture: An energy-efficient perspective. IEEE Commun. Mag. 2016, 54, 48–54. [Google Scholar] [CrossRef]
- Li, H.; Ota, K.; Dong, M. Learning IoT in Edge: Deep Learning for the Internet of Things with Edge Computing. IEEE Netw. 2018, 32, 96–101. [Google Scholar] [CrossRef]
- Dautov, R.; Distefano, S.; Bruneo, D.; Longo, F.; Merlino, G.; Puliafito, A. Pushing Intelligence to the Edge with a Stream Processing Architecture. In Proceedings of the 2017 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Devon, UK, 21–23 June 2017; pp. 792–799. [Google Scholar]
- Dunkels, A.; Gronvall, B.; Voigt, T. Contiki-a lightweight and flexible operating system for tiny networked sensors. In Proceedings of the 2004 29th Annual IEEE International Conference on Local Computer Networks, Tampa, FL, USA, 16–18 November 2004; pp. 455–462. [Google Scholar]
- Crossbow TelosB Mote Plattform, Datasheet. Available online: http://www.willow.co.uk/TelosB_Datasheet.pdf (accessed on 4 March 2018).
- Single-Chip 2.4 GHz IEEE 802.15.4 Compliant and ZigBee™ Ready RF Transceiver. Available online: http://www.ti.com/product/CC2420 (accessed on 4 March 2018).
- Osterlind, F.; Dunkels, A.; Eriksson, J.; Finne, N.; Voigt, T. Cross-level sensor network simulation with Cooja. In Proceedings of the 2006 31st IEEE Conference on Local Computer Networks, Tampa, FL, USA, 14–16 November 2006; pp. 641–648. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stream A | Stream B | Stream C | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| θ\m | 1 | 2 | 10 | 20 | 30 | 1 | 2 | 10 | 20 | 30 | 1 | 2 | 10 | 20 | 30 |
| 0.005 | 0.08 | 0.03 | 0.03 | 0.03 | 0.04 | 0.15 | 0.05 | 0.02 | 0.02 | 0.02 | 0.06 | 0.02 | 0.01 | 0.01 | 0.02 |
| 0.01 | 0.07 | 0.04 | 0.04 | 0.04 | 0.38 | 0.14 | 0.05 | 0.02 | 0.02 | 0.02 | 0.05 | 0.02 | 0.02 | 0.02 | 0.02 |
| 0.02 | 0.06 | 0.04 | 0.03 | 0.03 | 0.43 | 0.10 | 0.04 | 0.02 | 0.02 | 0.02 | 0.04 | 0.02 | 0.01 | 0.02 | 0.02 |
| 0.03 | 0.08 | 0.05 | 0.04 | 0.05 | 0.05 | 0.07 | 0.04 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 |
| 0.04 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.04 | 0.04 | 0.05 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 |
| 0.05 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.05 | 0.05 | 0.05 | 0.06 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 |
| m | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Stream A | 0.038 | 0.039 | 0.04 | 0.04 | 0.043 | 0.043 | 0.045 | 0.046 | 0.046 | 0.049 | 0.05 | 0.05 |
| Stream B | 0.024 | 0.024 | 0.024 | 0.024 | 0.025 | 0.025 | 0.025 | 0.025 | 0.025 | 0.025 | 0.026 | 0.026 |
| Stream C | 0.017 | 0.018 | 0.018 | 0.019 | 0.019 | 0.02 | 0.020 | 0.020 | 0.021 | 0.022 | 0.022 | 0.023 |
| Delay Measurement | ||
|---|---|---|
| 140 ms | 14 ms | |
| 3.4 ms | 1.8 ms | |
| 32 ms | 34 ms | |
| 8.9 ms | 7.1 ms | |
| 180 ms | 37 ms |
| Query Measurement | ||
|---|---|---|
| Fog | 5.3 ms | 9.0 ms |
| Cloud | 8.9 ms | 7.1 ms |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lavassani, M.; Forsström, S.; Jennehag, U.; Zhang, T. Combining Fog Computing with Sensor Mote Machine Learning for Industrial IoT. Sensors 2018, 18, 1532. https://doi.org/10.3390/s18051532
Lavassani M, Forsström S, Jennehag U, Zhang T. Combining Fog Computing with Sensor Mote Machine Learning for Industrial IoT. Sensors. 2018; 18(5):1532. https://doi.org/10.3390/s18051532
Chicago/Turabian StyleLavassani, Mehrzad, Stefan Forsström, Ulf Jennehag, and Tingting Zhang. 2018. "Combining Fog Computing with Sensor Mote Machine Learning for Industrial IoT" Sensors 18, no. 5: 1532. https://doi.org/10.3390/s18051532
APA StyleLavassani, M., Forsström, S., Jennehag, U., & Zhang, T. (2018). Combining Fog Computing with Sensor Mote Machine Learning for Industrial IoT. Sensors, 18(5), 1532. https://doi.org/10.3390/s18051532