1. Introduction
GF-3, the first C-band multi-polarization synthetic aperture radar (SAR) in China, was launched in August 2016. It has twelve different imaging modes, including spotlight mode, ultra-fine strip mode, scanSAR mode, full polarized strip mode, etc. The resolution of the spotlight mode can reach as high as 1 m, which can rank first in the C-band multi-polarized SAR systems all over the world [
1]. For the satellite’s advantage of working all-weather and all-day, these imaging modes can provide an abundant supply of data for various applications of the global observation, such as mapping the terrain on a large scale, monitoring the forestry resource for the management of exploiting the timber, as well as conservation of the wild life, monitoring the marine environment for meteorological research or oceanographical research, or other techniques [
2]. According to the open studies, the exploration about GF-3 polarimetric SAR data has aroused widespread interests. Yin et al. [
3] provided an analysis on the physical scattering mechanism of GF-3 polarimetric SAR data and showed that the data has great potential for target characterization. Shao et al. [
4] developed the method of strong wind retrieval from the cross-polarization GF-3 SAR data. Chang et al. [
5] had an experiment on the calibration of residual polarimetric distortion for channel imbalance and crosstalk of GF-3 polarimetric SAR images and improved the quality of image greatly. Dong et al. [
6] investigated the quality of GF-3 polarimetric SAR for classification purpose with the incorporation of XGBoost and polarimetric spatial information. Liu et al. [
7] developed an unsupervised change detection method with time-series of GF-3 polarimetric SAR images and showed the method not only can suppress the speckle noise greatly but also have good performance in change detection. It is obvious that the usage of polarimetric SAR data is of great importance in the ground surface observation or ocean surveillance, especially for the ground parameters inversion and ground classification. While an inevitable processing for the majority of applications of polarimetric SAR data is to acquire the covariance or coherency matrices with high accuracy, which requires speckle noise reduction. Thus, it is of great significance to study the speckle filtering of GF-3 polarimetric SAR data.
Speckle is an inherent phenomenon in SAR image because of the coherent superposition of waves reflected from a number of elementary scatterers in a single pixel [
8]. Speckle filtering of polarimetric SAR data is always an essential step for the SAR image interpretation. The improper filtering of speckle will lead to an inappropriate illustration of media’s scattering mechanisms, especially for the entropy from polarimetric decomposition and the degree of polarization. The entropy is zero in a single look complex plarimetric SAR data, while it increases with number of pixels because of the inclusive of different scattering mechanisms. For example, with the increase of pixels, that is, the increase of filter window size, more heterogeneous pixels which may indicate different scattering mechanisms are included in the window of the boxcar filter, thus leading to high entropy [
9]. Nowadays, with the development of the polarimeric SAR platform, a variety of speckle filtering approaches are proposed for the particular data.
Novak and Burl first explored the speckle suppression of polarimetric SAR data. A polarimetic whitening filter (PWF) [
10] was derived by combining all elements of the covariance matrix optimally and a single, speckle-reduced image is produced on the EMISAR’s single look polarimetric SAR data. Afterward, Liu et al. [
11] extended the PWF for multi-look in the form of covariance or coherency matrix and obtained a filtered image, while the deficiency of this method is that the polarimetry information is lost because it comes out only a combined intensity image. To reduce the speckle of the three polarimetric channels of HH, VV, and HV images, Lee et al. [
12] proposed a linear speckle filter on the hypothesis that the speckle noise model adapts to the multiplicative noise model. Based on this hypothesis, Lin et al. [
13] developed a vector filter by using the minimization of the mean square error. Nevertheless, it cannot filter all the elements of the covariance or coherency matrix. Goze and Lopes [
14] extended the approach for exclusive single look imagery to cover all elements of the covariance. For the reason that the depiction of multiplicative noise model for the off-diagonal terms of the covariance is controversial, Lopes and Sery [
15] developed several filtering approaches to account for the texture variation. All the filters aforementioned exploited the degree of statistical independence within the linear polarization channels. The crosstalk between channels cannot be addressed properly and the polarimetric information is not preserved well [
9]. As for the simplicity and computational efficiency, we find that the boxcar filter is still the most commonly used approach to handle with the speckle reduction of poalrimetric SAR imagery, especially for the application of parameter inversion from homogeneous media. While it is at the cost of degrading the resolution and spatial details, and considerable square imprints emerge when both the targets show point scattering and the window size is large.
In order to cope with the issues above, Lee et al. [
16] proposed a new approach in polarimetric SAR filtering. The minimum mean square error (MMSE) was used to both the diagonal and the off-diagonal elements of the covariance or coherency matrix, which was named as Lee Filter. Subsequently, the edge-aligned windows were first employed to preserve the image details, and the filter was defined as Refined Lee filter [
17]. To come up with this method, three basic principles were taken into account as follows: (1) all the elements in the covariance or coherency matrix have to be filtered independently in the spatial domain to avoid cross-talk; (2) each term of the covariance or coherency matrix should be filtered in the same edge-aligned window, which is similar to multi-look processing, to preserve polarimetric properties; and (3) the filter is self-adaptive to weight the covariance or coherency matrix of the center pixel with the mean value from selected neighboring pixels. This principle is to preserve point targets, as well as speckle elimination. Though the three principles are considered, the capability of keeping the edge sharpness is very limited in the heterogeneous regions, such as the streets, the city blocks, the bright point scatterers, etc. The streets always show linear features and the single point scatterers cambered features. While all the windows in Refined Lee filter still have the square brims. That is to say the edge-aligned windows of the Refined Lee filter do not match very well to the edge signature when the scene becomes complicated.
In [
18], an improved sigma filter was proposed for speckle filtering of SAR imagery. The statistic characteristics, which were first taken into consideration by sigma filter [
19,
20] based on the simple concept of two-sigma probability, were fully utilized. The filter is very effective in eliminating the deficiencies of sigma filter, such as bias in the estimates, unfiltered black pixels, and smearing of the strong targets. In this processing, the sigma range was redefined based on the theoretical speckle distribution to remove the bias of mean values. The MMSE estimator was incorporated to address the problem of leaving out black pixels and depressing strong reflective scatterers. In [
21], the improved sigma filter was extended to polarimetric SAR imagery. In the procedure, the speckle filtering was applied only to distribution media, and the strong targets were leaved unfiltered. The estimation of priori mean and sigma range were using the pixels selected by all the three polarizations corresponding to the specular, double bounce and volume scattering mechanisms. This implementation was addressed to account for the preservation of scattering mechanisms. Whatever estimations by the coherency or covariance matrix are carried out, the polarimetric properties are only from the diagonal elements of the matrix. The off-diagonal elements from the matrix do not contribute so much to the polarimetric information preservation.
In recent years, a novel idea of despeckling algorithm for polarimetric SAR data has been proposed [
22,
23,
24,
25]. The basic idea is to take advantage of image self-similarity. The main principle is to select homogeneous pixels in a large-scale area (always 15 × 15 pixels) in the filtering process. In [
22], the homogeneous pixels are selected by comparing a 3 × 3 patch in a 15 × 15 searching window based on the complex Wishart distribution, and then the filtering process is performed by summing up the homogeneous pixels with weights according the test statistics values. The algorithm can preserve strong point targets, edges and texture feature while suppressing speckle. Nevertheless, the polarimetric scattering mechanisms are not analyzed so much. In [
23], the non-local filter is extended for denoising polarimetric or interferometric SAR images. The algorithm is fully automatic and handles single and multi-look images and offers a flexible frame work for resolution-preserving speckle reduction. In [
24,
25], both the speckle filters are scattering-based nonlocal means. With the performance of speckle reduction and detail preservation they are even able to preserve scattering mechanisms of the illuminated surface. One dominant deficiency of all these filters is that they are very time-consuming because of the complex process procedures.
Besides the filters mentioned above, a set of polarimatric SAR speckle filters are presented according the open literatures, such as the scattering model-based filter (SMB) [
9], the trace-based filter (TBF) [
26], the subspace filtering of Mueller matrix (SFMM) [
27], etc. For the SMB, only those pixels in a square window corresponding to the same scattering mechanism, which are obtained from the Freeman-Durden decomposition, as the central pixel are considered. Pixels with similar dominant scattering mechanism are grouped into clusters and then, a Local Linear Minimum Mean Square Error (LLMMSE) filtering is applied using only pixels in the same cluster. This filter is effective in speckle reduction as well as preserving strong point target signatures perfectly. While the algorithm needs to classify the PolSAR image first, about which the accuracy of classification is still a question under some circumstances. For the TBF, it is an iterative partial differential equations (PDE) filter that is equivalent to a local convolution by oriented Gaussian filters. The shapes of the local Gaussian filters are derived from the local image structure, through the structure tensor. The amplitudes of all the covariance matrix terms are considered to construct the structure tensor. The filter can retain a good performance between a high degree of smoothing and detail preservation. While the deficiency is that it needs some efficient controls of the filtering process and the number of iteration is difficult to decide. As for the SFMM, the first step of process procedure is to establish a local polarimetric feature matrix composed of the normalized Mueller coefficients. The matrix is named the parameter space and consists of two orthogonal subspaces which are the signal subspace and the noise subspace, respectively. A subspace decomposition (PCA) is performed and the local polarimetric information is then reconstructed from only the significant PCA coefficients. In this way, edges of different kinds of targets are preserved for a good performance of noise reduction. While deficiency for this method is that the signal subspace and the noise subspace we choose from the decomposition result cannot keep completely orthogonal, thus leading to a leak of noise into the signal subspace, i.e., the despeckling does not perform very well. In this paper, we first explore the speckle filtering performance of GF-3 polarimetric SAR imagery in strip imaging mode. In order to mitigate the degrading of the spatial resolution, and to preserve the polarimetric properties on a large extent, in addition to the speckle reduction, three principles are introduced to meet with the requirement above. Then a joint restriction principle is proposed for the polarimetric SAR filtering processing. The remainder of this paper is organized as follows:
Section 2 describes the three restriction principles.
Section 3 gives the details processing procedure of joint restriction Principle. In
Section 4, the experiments on GF-3 polarimetric SAR data are conducted to validate the effectiveness of the proposed method. The comparisons with the common and typical filtering algorithms as well as the discussion are carried out in this section. Conclusions are drawn in
Section 5.
4. Experimental Results and Discussions
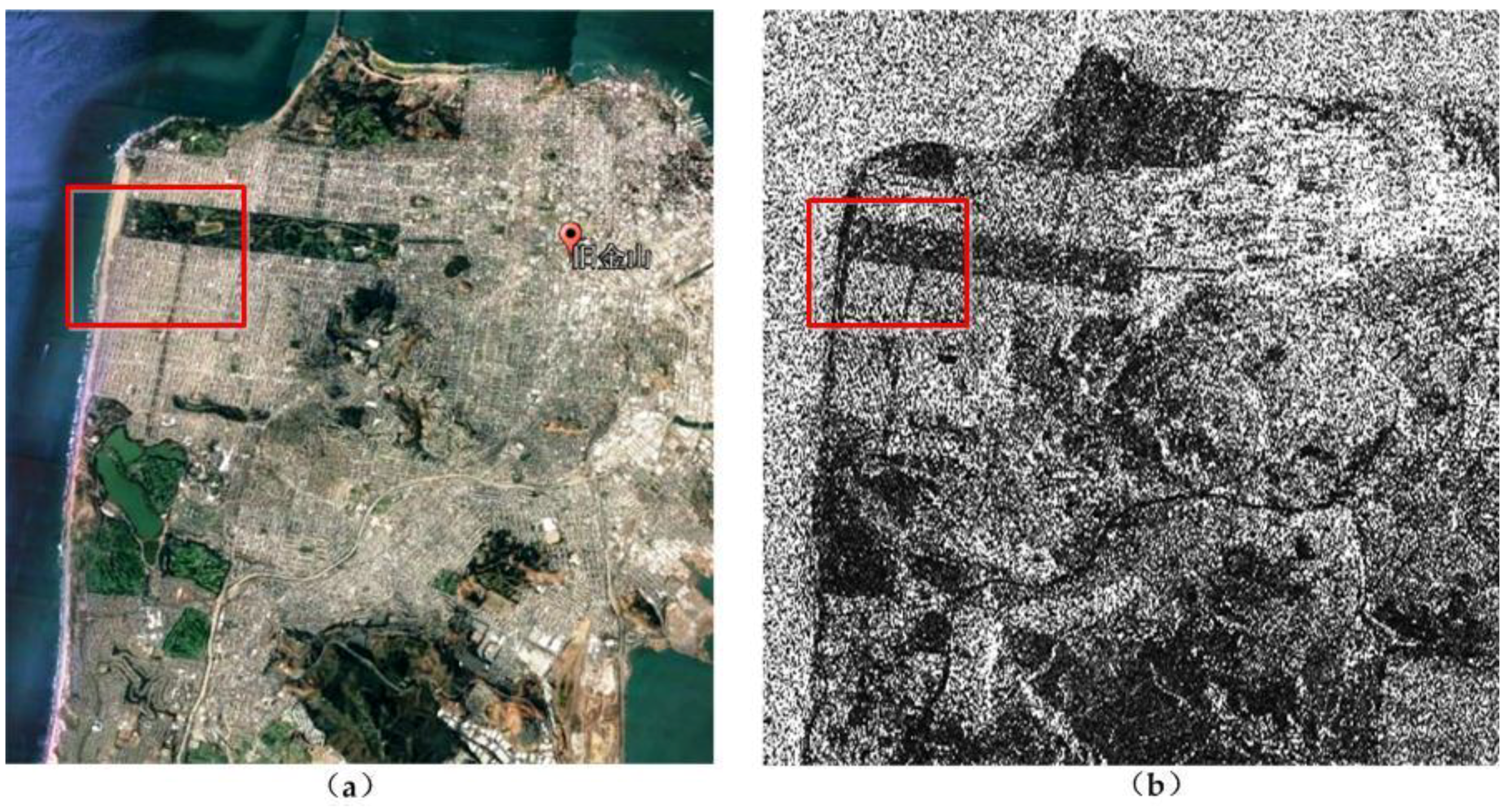
To illustrate the performance of JRPF, the GF-3 polarimetric SAR data for San Francisco (CA, USA) are used as the experimental data. The acquisition mode is C-band full-polarimetric Strip I (QPSI) mode. The images are single look complex (SLC) with the resolution of 8 m. The experimental site has the main land cover of ocean area, vegetation, city blocks, street, etc. The data was acquired on 15 September 2017 on ascending passes with right looking.
Figure 4 shows a Google Earth map obtained on 2 September 2017 and the span image of GF-3 polarimetric SAR. The area size is 2557 × 1787 pixels.
Since the initial image is too large to exhibit the details of the scene, the texture about city blocks and streets are also not distinct. A part of the scene is cropped out from the left side of
Figure 4, which includes the typical land cover. A zoom-in image from the red box in
Figure 4 is shown in
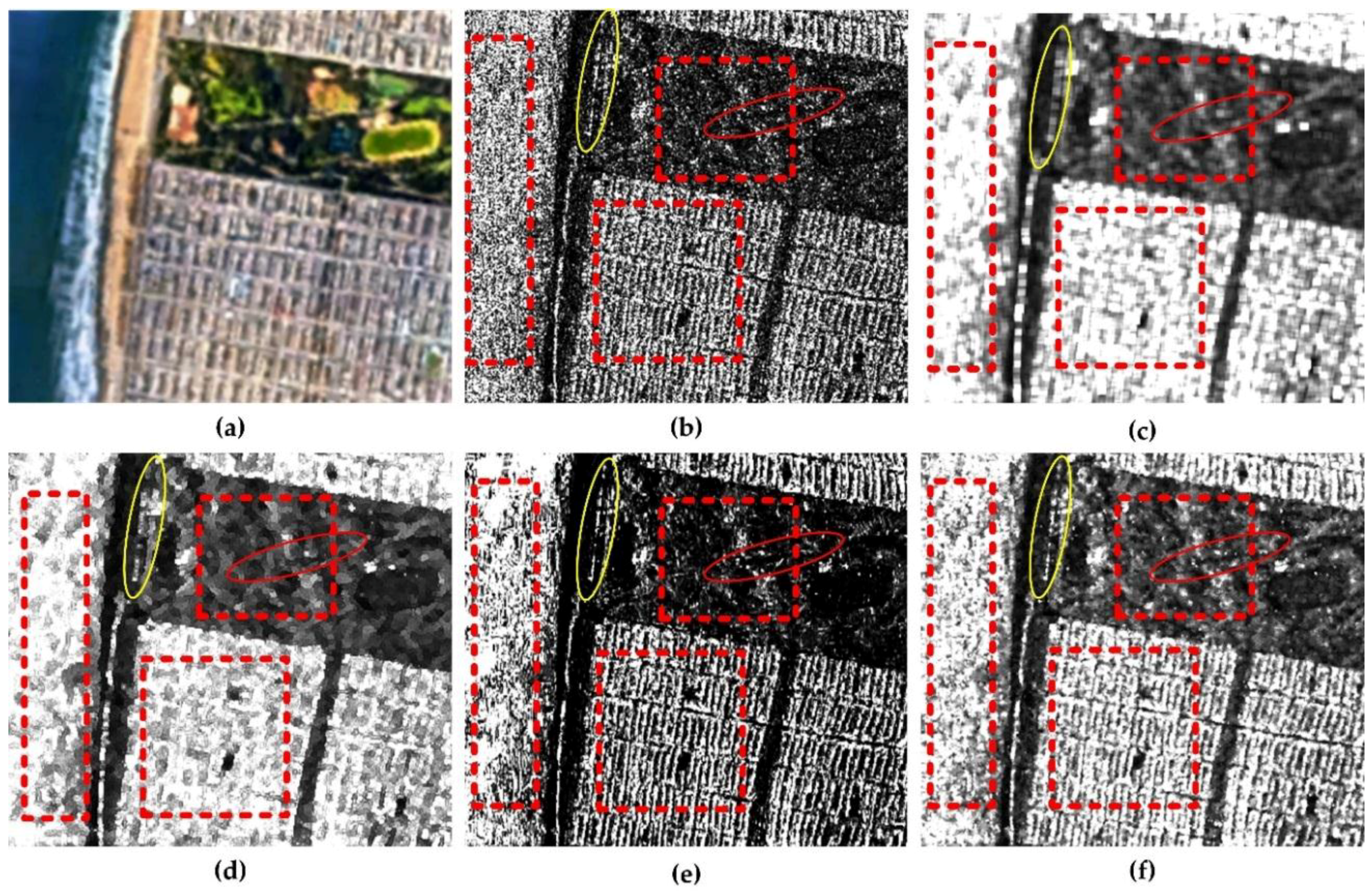
Figure 5a. From the Google Earth map, the land covers are mainly about vegetation, city blocks, streets, and ocean. The vegetation area is a park with forests, some crook paths and a racecourse. The city blocks contain a large quantity of orderly tilted buildings and streets. The ocean area is on the left of the image, along which are beach and embankment. This small area contains 400 × 400 pixels.
For comparison, the most commonly used filters of boxcar the Refined Lee filter [
35] and the nonlocal filter [
23] are applied in the experiment. All the three filters are applied with the 7 × 7 window except for the nonlocal filter. The nonlocal filter is operated in a 21 × 21 searching window with a 7 × 7 patch. The span images of polarimetric data are used to demonstrate the performance of retaining the edge sharpness and texture information as well as speckle reduction.
Figure 5b is the original span image, which is smeared by speckle noise severely.
Figure 5c shows the span image filtered by 7 × 7 boxcar filter. The result of 7 × 7 boxcar filter exhibits a good characteristic of reducing speckle noise, but the textures of the city blocks are blurred thoroughly. Simultaneously, for its initial deficiency, there exists an inevitable square imprints surrounding the strong targets. For the results of Refined Lee filter in
Figure 5d, it seems that the filter has a great power of smoothing the image, and the edges between the park and the city blocks preserved well comparing with the result of boxcar filter. While the street outlines between the city blocks are distorted too much. As for the results of nonlocal and JRPF, both the two filters show strong capability for despeckling. From the visual results, we can find that, not only the speckle is reduced on a large extent, but also the edge signatures are preserved as much as possible with respect to the results of nonlocal filter and JRPF. In terms of edge and texture preservation, the nonlocal shows better performance than other filters in the building area, where we find the city blocks are considerably distinct. While in the areas of volume and the ocean, the speckling result seems discontinuous, i.e., the smoothing results are not as we expect. For a detailed illustration, two typical targets are selected to demonstrate the effectiveness. The targets are a crook path in the park enclosed by a red ellipse and an embankment along the coast enclosed by a yellow ellipse. From
Figure 5, we can see that the crook path can only be seen on the results of 7 × 7 nonlocal and 7 × 7 JRPF, and the embankments in both the 7 × 7 nonlocal and JRPF show similar morphological information with the original image. The embankment has the square imprints in the result of 7 × 7 boxcar and discontinuity in the 7 × 7 refined Lee filter in
Figure 5d. The streets between the city blocks are all blurred more or less except for the result of 7 × 7 JRPF shown as
Figure 5f. From the analysis above, both the nonlocal filter and JRPF shows effective speckle reduction as well as retaining the texture and subtle but distinguishable details, while the nonlocal filter may have better performance in preserving edge signature and texture features.
In order to verify the performance of the speckle noise reduction and edge preservation of different filtering methods, a further quantitative analysis is given by introducing three evaluation parameters. One is the Equivalent Number of Looks (ENL), which is the ratio of the square value of mean to variance of span images over homogeneous areas, and it is the index of the speckle reduction [
42]. Higher ENL value indicates higher efficiency in smoothing speckle noise. The second parameter is the Edge Preserving Index (EPI), which is used to test the line and edge preservation of the speckle filtering [
43]. The value of EPI is within the range of (0, 1). The higher the EPI value is, the better the performance of the edge preservation is. Another parameter is the coefficient of variation (we use Cx to represent this parameter here) [
43], which considers the region heterogeneity. Good texture preservation can be obtained only if the coefficient of variation estimated for the filtered image by means of spatial averages is close to the value expected for the original image. The three parameters are tested mainly on three areas for different filtering results, which are enclosed by the red dash boxes in the ocean area, the vegetation area and the building area, respectively. The parameter values are listed as
Table 2.
In
Table 2, the ENL, EPI and Cx are calculated before and after filtering by different methods in the three areas aforementioned. For the 7 × 7 boxcar, the ENL are the highest in all the three areas, while the EPI and the Cx are the lowest comparing with the results of other filters. Since the theoretical feature of boxcar, i.e., the theoretical function of boxcar is nothing but an averaging filter, it is predictable that the 7 × 7 boxcar can over smooth the image to some extent. As for the 7 × 7 Refined Lee filter, all the three parameters in the three areas are almost the same with the values of 7 × 7 JRPF. Tiny differences are that the ENL of the 7 × 7 JRPF in the three areas are a little smaller than that of the 7 × 7 refined Lee filter, whereas the EPI are a bit higher. Although the ENL in the 7 × 7 JRPF is comparatively lower than other filters except for 7 × 7 nonlocal, it has a marked increase compared to the original span image. That is to say, the new approach is adequate for the speckle reduction, and also it can preserve the edge feature much better than the other filters beside the nonlocal filter. In terms of the visual speckle filtering results, we see that the nonlocal filter shows a strong performance in speckle reduction and the details preservation. Whereas, the filtering parameters evaluated in the
Table 2 show that the results are very abnormal. All the ENL in the three areas are amazingly lower than the original results. Unbelievably, all the EPI are out of the range of (0, 1). Depending on the process procedure of searching a patch in a large window (always 21 × 21), one possible reason is that the filter has thrown away a large amount of coherent information in neighbor pixels and integrated too much information far from the object pixel. Though the results show distinctive edge feature and texture in some scenes, like the city blocks, the land covers after filtering are very dissimilar to the original ones, thus leading to the abnormal results comparative to the general results. For Cx, this filter also has the highest values than other filters, which indicate once more that it can retain the texture very easily.
As for the EPI of ocean area, the value in the 7 × 7 JRPF is higher than the others beside the nonlocal filter. One rational explanation is that beach and ocean waves contribute to the increase of the texture in the sea. For the vegetation area, all the values of ENL are a bit lower than the ocean area in the different filtering methods except for nonlocal filter, while the values of EPI are higher instead. It is obvious that the vegetation area is a park consisted of different targets like the forest and the crook paths. It is hard to say whether it is a homogeneous area. The same tendency is shown in the building area. For the parameter of ENL, the values are much lower, and the values of EPI are much higher in this area. Because this area contains large number of city blocks, and the complex circumstance results in sufficient edge signature and texture information. Thus, the EPI in this area shows a highest value in the result of 7 × 7 JRPF, which can demonstrate that the proposed method has a good performance in the preservation of edge sharpness. In terms of Cx, all the results in the three areas for 7 × 7 JRPF are more close to the Cx of the original span than the other filters, which demonstrates that the 7 × 7 JRPF is very effective in the edge preservation.
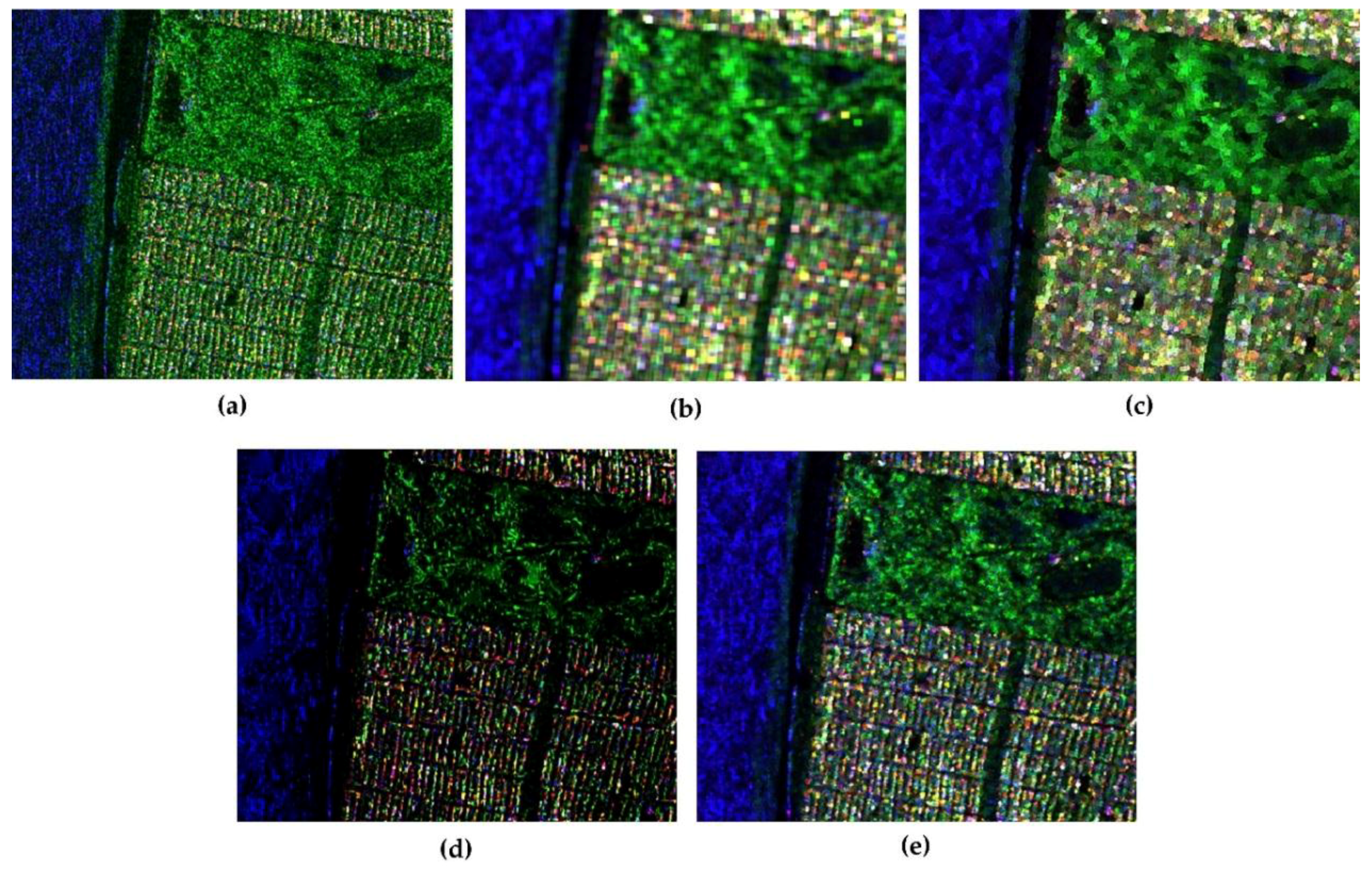
Another remarkable function of JRPF is the preservation of polarimetric scattering mechanism. To describe the performance of retaining polarimetric property,
Figure 6 shows the Pauli decompositions with the different filtering methods. In the color composition, red is for
, green is for
, and blue is for
. Corresponding to these colors, the scattering mechanisms are double-bounce, volume, and surface returns, respectively. From the results in e
Figure 6a, we can see that the scattering mechanism is badly impaired by the speckle noise, so that the city blocks show a strong performance of volume scattering, which is unfit for its rational surface scattering characteristics. The same impact is on the racecourse in the vegetation area, which is specular return for the scattering mechanism. For comparison, we still use boxcar filter, the Refined Lee filter, the nonlocal filter and JRPF to mitigate the speckle noise. The boxcar is in 7 × 7, the Refined Lee filter in 7 × 7, the nonlocal filter in 7 × 7 (with 21 × 21 searching window) and JRPF in 7 × 7. All the filtering results show reasonable good filtering characteristics of reducing speckle noise and preserving scattering mechanisms.
Figure 6d,e illustrate that, in city blocks, the scattering mechanisms of JRPF show more about surface and double-bounce, while the volume is still evident in boxcar (
Figure 6b) and the refined Lee filter (
Figure 6c). For the specular return, the reflectance in racecourse is much lower in the result of nonlocal and JRPF than that of boxcar and refined Lee filter. All the analyses above verify that the proposed method of speckle filtering is capable of retaining polarimetric scattering mechanism. Alternatively, the Pauli decomposition can also be used to evaluate the edge preservation. From
Figure 6, the textures of city blocks and the crook paths in the vegetation area are more distinguishable about nonlocal and JRPF than the other filters.
In order to give a further quantitative analysis,
Figure 7 shows the polarization similarity measurement after different polarimetric speckle filtering methods. The results are obtained according to the SSF of coherency before and after filtering. It can be seen that, from
Figure 7a–d, all the filtering results have high values of SSF in the ocean area. It seems that there is no difference between these filtering methods in the ocean area. Nonetheless, either the SSF in vegetation area or in building area for 7 × 7 boxcar and 7 × 7 refined Lee filter are a bit lower than the result of 7 × 7 JRPF in
Figure 7d. The two filters are very similar for the three areas according to the SSF results in
Figure 7a,b. Obviously, the SSF of the nonlocal filter shown in
Figure 7c exhibit a very different tendency comparative to the former two filters. The SSF values in building area increase a little, while the values decrease too much for most pixels in vegetation area. Though it has the ability to keep the edge and texture very well, some pixels have the SSF values even close to zeros in the result of nonlocal filter, which indicates that this filter cannot keep the scattering mechanisms, especially for the heterogeneous areas. The result can also be explained rationally by the reason we guess aforementioned, that is, the filter brings in too much incoherent information in the process of filtering due to a searching procedure on a large scale. Generally, both in the vegetation area and in the building area, the value of SSF can be improved largely for the new proposed method. Compared with the results of the building area in JRPF, the SSF in the vegetation area increases more significantly. All the analysis above, we find that only the method of JRPF can preserve the scattering mechanisms very well, at least for the three common scattering mechanisms (double-bounce, volume, and surface scattering).
To visualize the performance, we obtain statistical characteristics of polarization similarity. Four different statistical curves of SSF under different filtering methods in both vegetation area and building area are presented in
Figure 7e,f, respectively. Among the color, blue represents the statistical curve filtered by 7 × 7 boxcar, black represents by 7 × 7 refined Lee filter, green represents by 7 × 7 nonlocal, and the red color is filtered under 7 × 7 JRPF. From all the statistical results, it can be seen that the SSF curves of the 7 × 7 boxcar and black 7 × 7 refined Lee filter are almost in superposition and their peaks are around 0.8 in vegetation area. The curve of nonlocal does not have an obvious peak with the low SSF in this area. Whereas, the peak of JPRF is near to 0.9, which shows that the new method can maintain the polarization scattering characteristics better. Similarly, the SSF in the building area are selected for statistics, and peaks of SSF curves of the other three filtering methods comparative to JPRF are around 0.88. The peak of SSF curves after filtering by JPRF is close to 0.97. In other words, the speckle filtering method of JPRF can almost maintain the polarization identically with its original one in the building area.
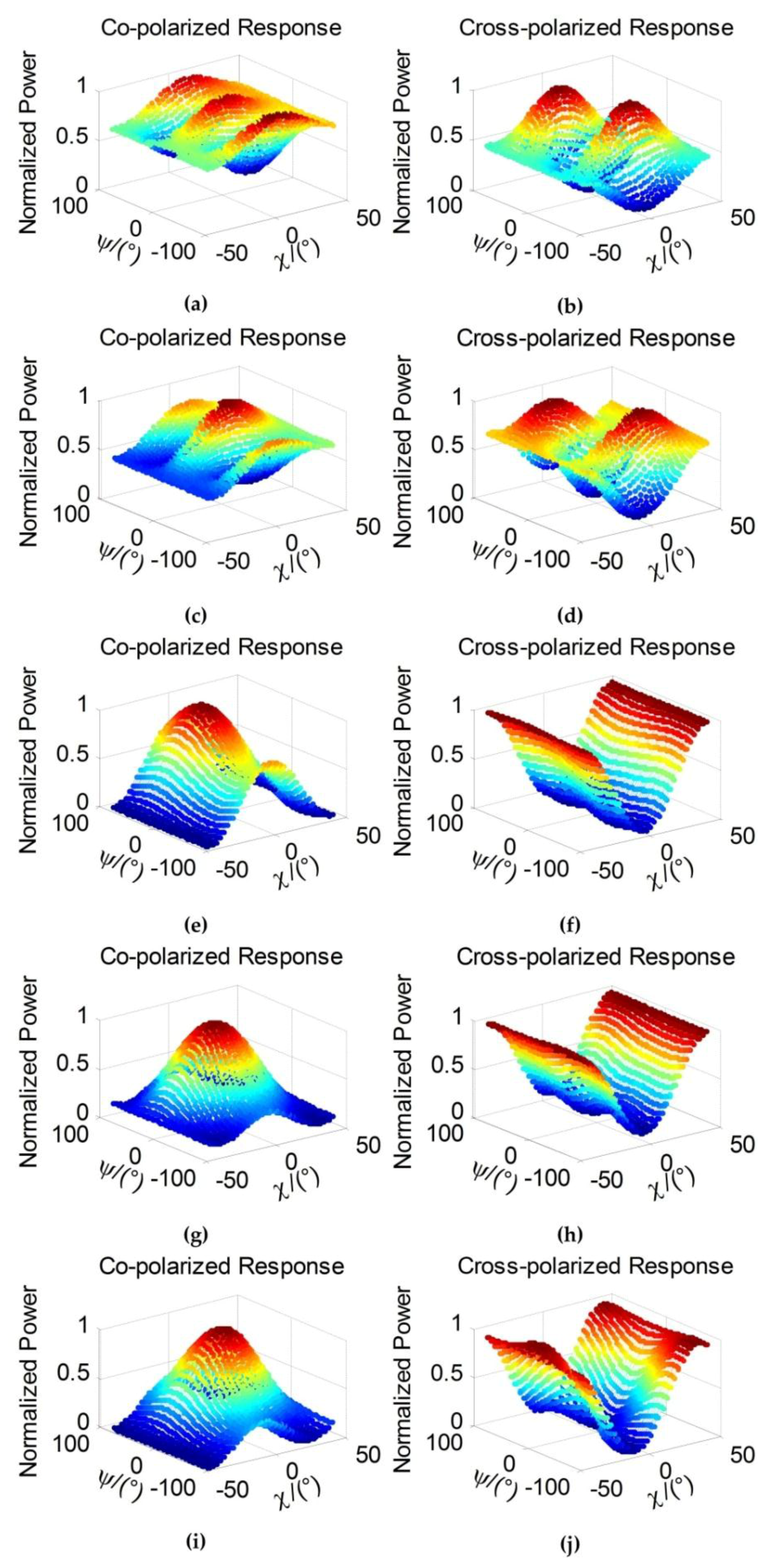
Furthermore, we pick out two strong point target scatterers in vegetation area and building area to explore their polarization response separately. The polarization response shows the normalized power at different polarized patterns [
43]. The co-polarized and cross-polarized response, which are formed in a combination of ellipse orientation angle
(degree) and ellipticity angle
(degree), are applied to study the polarization signature. In
Figure 8, the co-polarization and cross-polarization signatures of pixel (115, 342) in vegetation area are described to illustrate the performance of retaining polarization property. From the left side to the right side of
Figure 8, the results are about 7 × 7 boxcar, 7 × 7 refined Lee filter, 7 × 7 nonlocal filter (with 21 × 21 searching window), 7 × 7 JRPF and the original response without filtering. The upside response of
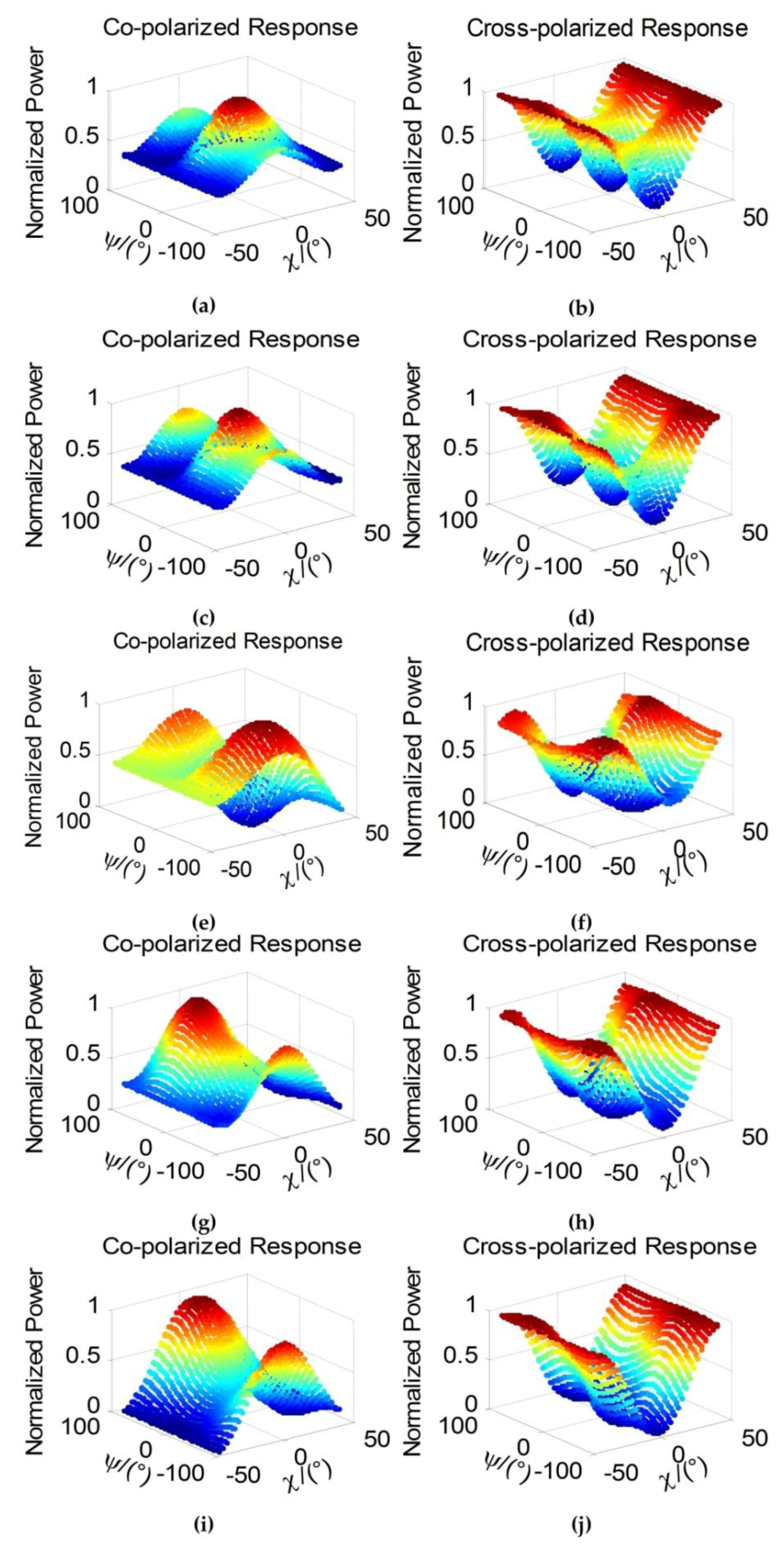
Figure 8 is co-polarized and the down side cross-polarized. The contrast of these methods indicates that the JRPF can retain the similar response with the original one, which demonstrates a good performance of the new speckle filtering. An identical process is operated in the pixel (358, 275) in building area as the results in
Figure 9. All the results of polarization response are distorted severely corresponding to the original one, apart from the result of JRPF.
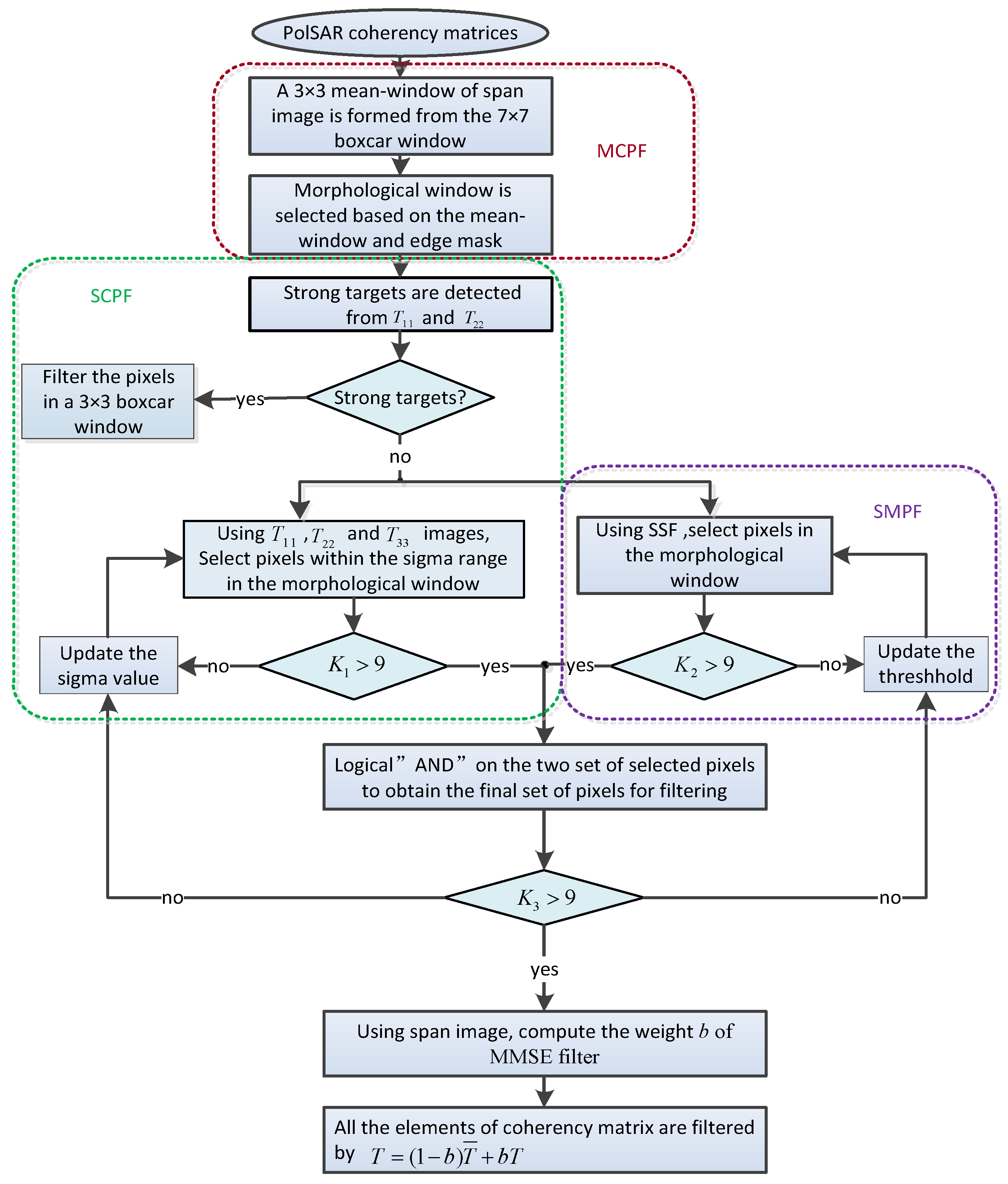
For the sake of argument, we intend to discuss all the possible results by ignoring one of the three principles. The processing procedure is still the same as the flowchart shown as
Figure 3. The only difference is to ignore one principle shown in the colored boxes in
Figure 3.
Figure 10 shows the speckle filtering results by different combination of the three principles.
Figure 10a is the result of combination of MCPF and SMPF by ignoring SCPF.
Figure 10b is the result of combination of MCPF and SCPF by ignoring SMPF, and
Figure 10c is the result of combination of the other two principles. The JRPF result is present as a contrast in Figured. When only consider the principles of morphological consistency and scattering mechanism preservation, the filtered span image depicts a bad performance in preserving the edge signature compared with the other combination results, especially in the city blocks (see
Figure 10a). However, the other two forms of combination can preserve the texture information very well (see
Figure 10b,c), and also the difference seems indistinctive between the two combination results and the JRPF result. It suggests that the statistic characteristic principle plays an important role in the performance of preserving the edge signature and texture features. To investigate whether the two combinations can satisfy the requirement of the speckle filtering with the same effectiveness as JRPF, the ENL, EPI and Cx values after filtering by two combination principles in the three areas are given in
Table 3.
In
Table 3, the ENL, EPI and Cx values after filtered by different combination of the three principles in different areas are listed. We find that the ENL value and the EPI value are in an opposite trend in vegetation area except for the combination of MCPF and SMPF. The combination of SCPF and SMPF has the highest value of ENL in the vegetation area, while the value of EPI is the lowest for this combination. For the combination of MCPF and SMPF, with a very similar ENL value of the combination of SCPF and SMPF, there comes out an abnormal value of EPI, i.e., both the value of ENL and EPI are very high comparative to the value of others. One possible reason is that the morphological windows express an obvious feature for the edge preservation. Though the result seems to be what we expect, the visual result in
Figure 10a shows blur especially in the creek path. For the combination of MCPF and SCPF, the ENL value decreases a little, whereas the EPI increases. Furthermore, JRPF has a lower value of ENL and higher value of EPI than the combination results of MCPF and SCPF. Also, the two values in the combination of MCPF and SCPF are very close to the values in the JRPF. Accordingly, we can only conclude that it is very efficiency in speckle reduction for the combination of SCPF and SMPF, while the JRPF has a better result than the other three filtering forms for edge preservation in the vegetation area. As for the building area, the values of ENL in the four filtering forms are much lower than the corresponding results in vegetation area, and the values of EPI are a bit higher except for the combination of MCPF and SMPF. Amazingly, the ENL value and the EPI value are in the same trend in building area excluding the value of MCPF and SMPF. Though the ENL value is highest for combination of MCPF and SMPF, the EPI is the lowest amongst the four filtering forms. Whereas, the EPI value of JRPF is highest with an acceptable value of ENL. Moreover, the results for the combination of MCPF and SCPF are very similar to the values of JRPF. Considering abundant texture, we believe that JRPF keep a better performance than the others. In the ocean area, the value s of ENL and EPI are close to the values in vegetation area and the tendency is the same except for the combination of MCPF and SMPF. With a highest value of ENL and lowest EPI, we may think that this combination is a better strategy for filtering when only consider about the performance for ocean area. As a matter of fact, when talking about the speckle filtering, we may concern more about the vegetation area and city blocks which include more scattering information. In terms of the speckle reduction and the edge preservation for the whole image, the filtering method of combination of MCPF and SCPF seems to be capable of substituting the JRPF. Nevertheless, the scattering mechanism preservation should be also taken into consideration in the speckle filtering. For comparison, the SSF of filtering results by different combination of the three principles are shown in
Figure 11. As for the parameter of Cx, Whatever the region is, the values of Cx are very close to each other for different combination of the principles. The main features are that the values for different combination of principles are much higher in the building area and the values for JRPF are always the highest of all the combinations of the principles in all the three areas.
In
Figure 11, we can see that the SSF values in both the vegetation area and building area for the combination of MCPF and SCPF are much lower than that for the other combination form, as well as the result in JRPF. The other three filtering forms are very similar for the value of SSF, because only the combination of MCPF and SCPF neglect the restriction of scattering mechanism preservation. That is to say this combination cannot substitute the JRPF at all. From above all, none of the three principles aforementioned could be ignored during the speckle filtering for polarimetric SAR data.
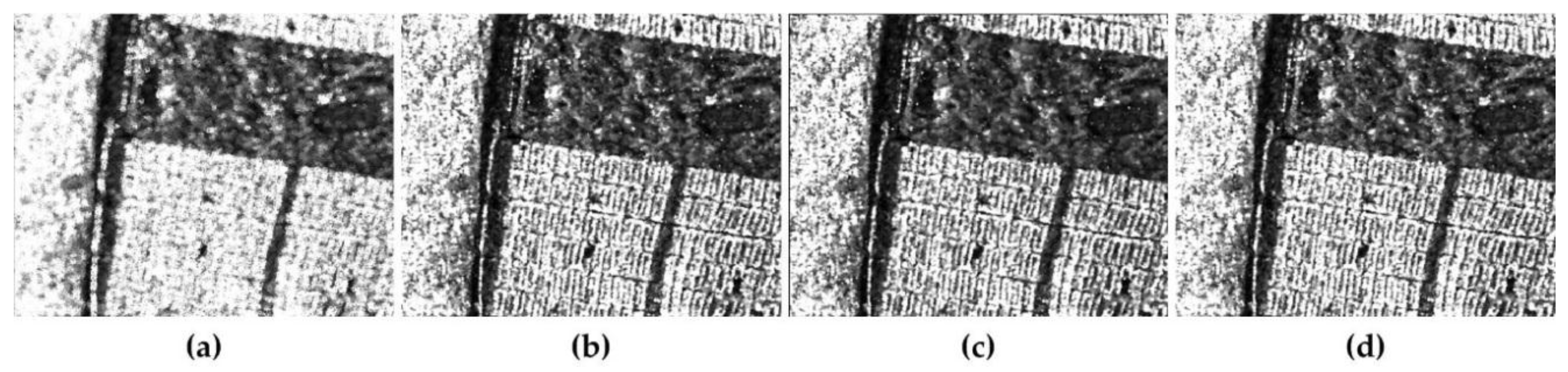
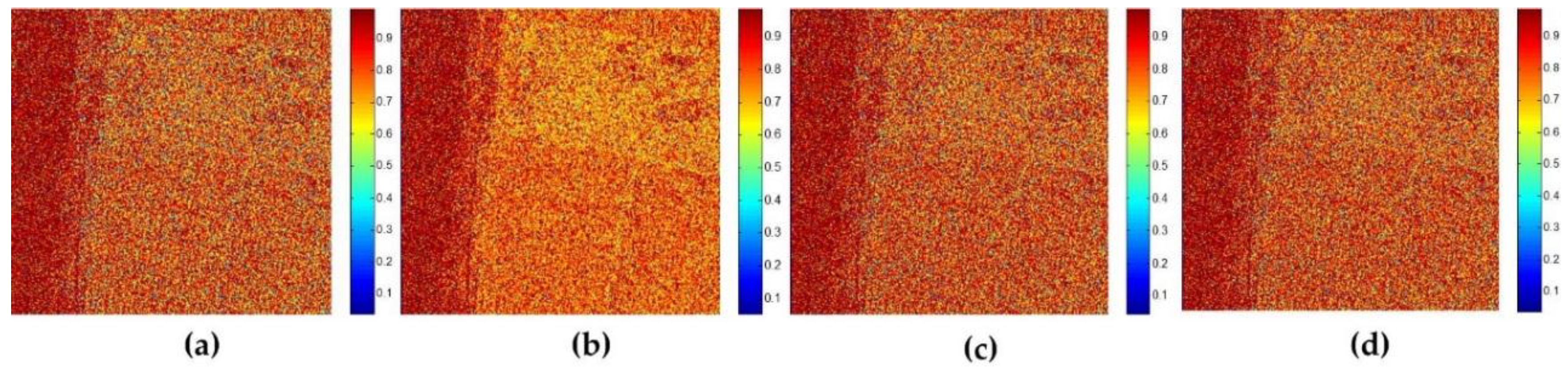
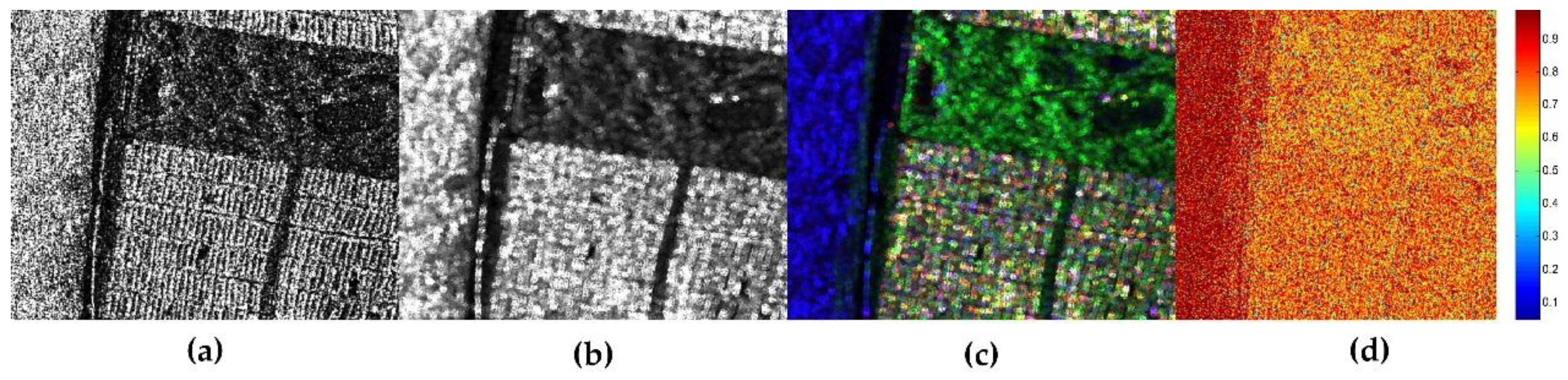
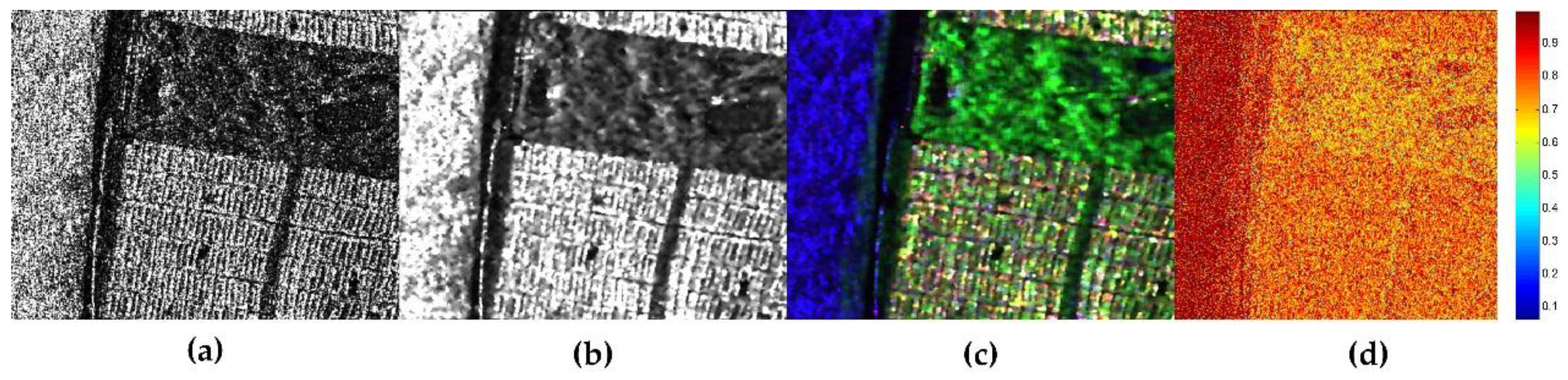
To explore the contribution of each stage of the three restrict principles (MCPF/SMPF/SCPF), we perform additional experiments with only one of the three principles. The filtering results in
Figure 12,
Figure 13 and
Figure 14 are for MCPF, SCPF and SMPF, respectively. All these figures include four images, which are the original span image, the filtered span image, the Pauli decomposition and the SSF after filtering. From
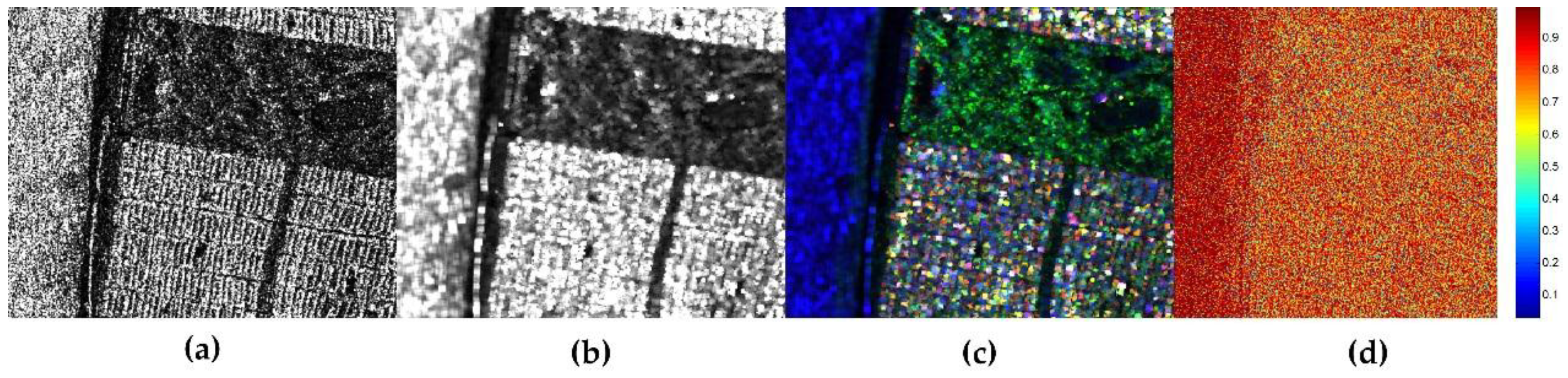
Figure 12, we can see that the MCPF have reduced the speckle noise on a large extent. A very obvious feature is that this filter keeps the most objects have a camber or linear brim for its restriction principle, which is very adaptive to the edge signature especially in the vegetation area (like most trees). The main contribution of this stage is that it can avoid the square imprints which may always emerge in the boxcar filter, though the edge preservation may do not perform very well under this principle. For the filtering results only by SCPF,
Figure 13 shows that this principle can reduce the speckle noise more thoroughly than the filtering result only by MCPF. Obviously, this restriction can keep the edge and texture as much as possible. Though there may be some small square imprints in the vegetation area, the edge signature is very distinctive, especially in building area. As for the result filtered only by SMPF, a dominant contribution is that it can preserve the polarimetic scattering mechanism for all the three different areas. From
Figure 14c, we can see that the volume scatterers are much less and the surface and double-bounce scatterers are much more comparable to the results of
Figure 12c and
Figure 13c in building area. Also, the SSF are much higher than the other two restriction principles.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}