Sidelobe Suppression with Resolution Maintenance for SAR Images via Sparse Representation

Abstract
:1. Introduction
2. Basic Theory of Sparse Reconstruction
3. Reconstruction Model of SAR Imaging and the Proposed Method
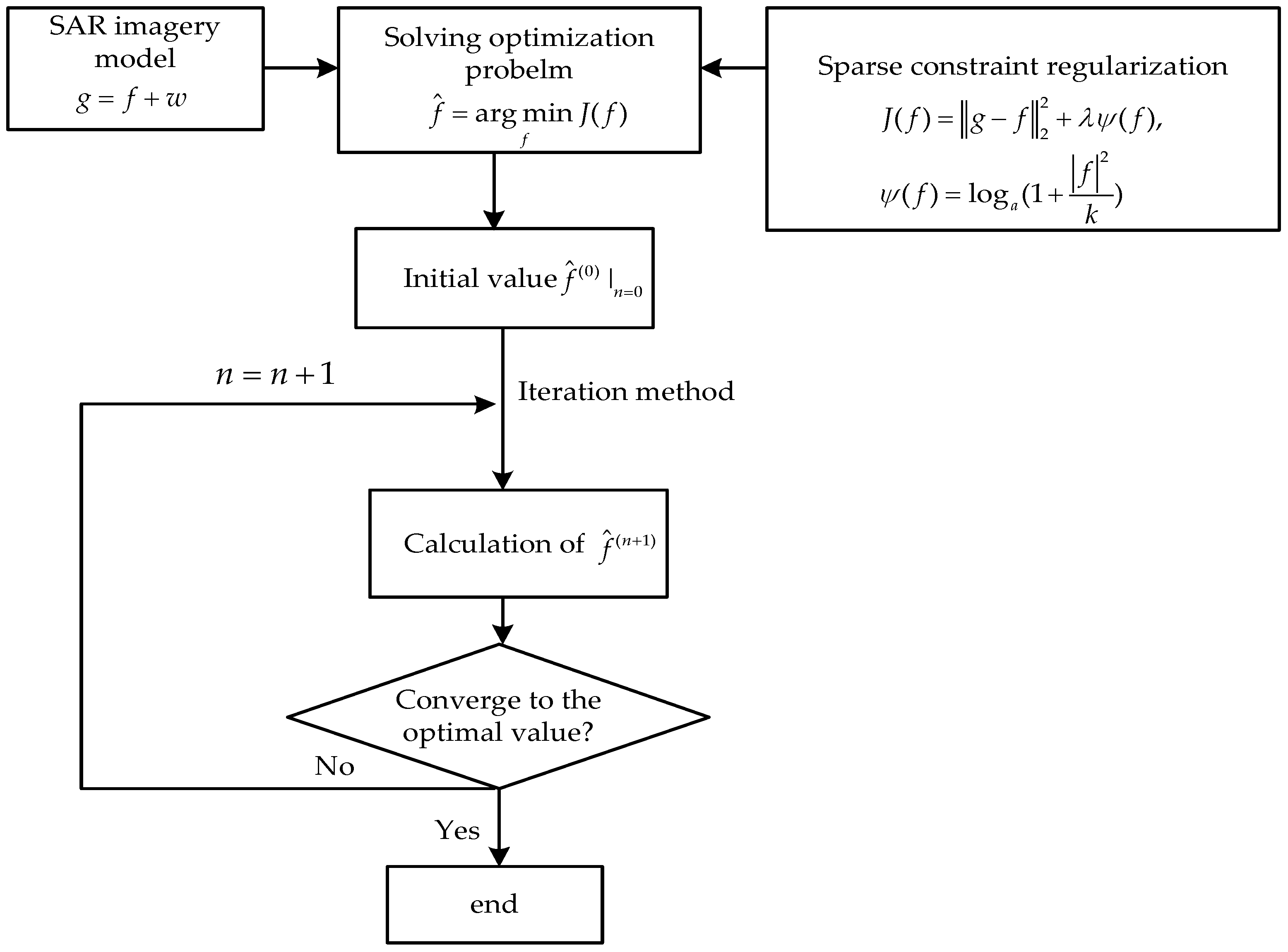
3.1. Reconstruction Model of SAR Imaging and Solution
3.2. Analysis of Sidelobe Suppression
4. Performance Assessment and Discussions
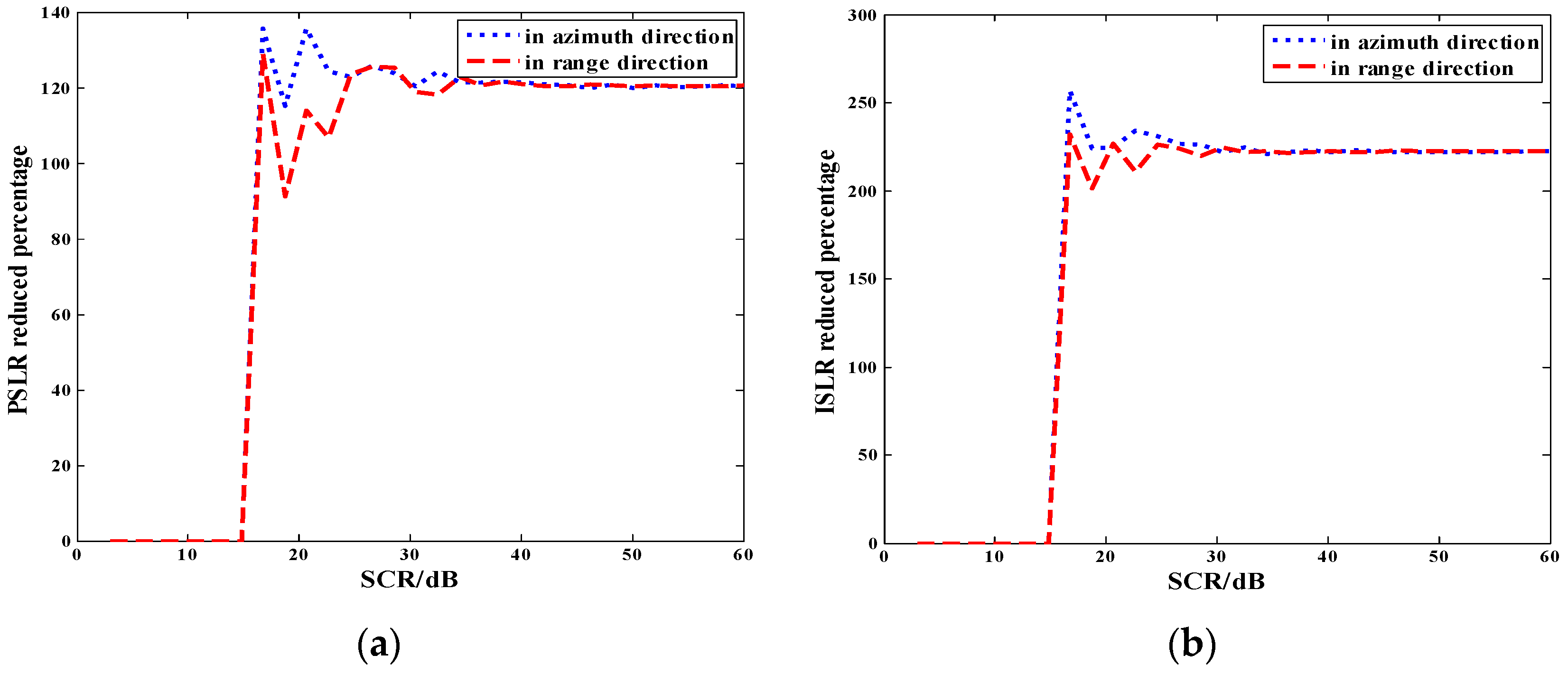
4.1. Evaluation Indicators of Sidelobe Suppression
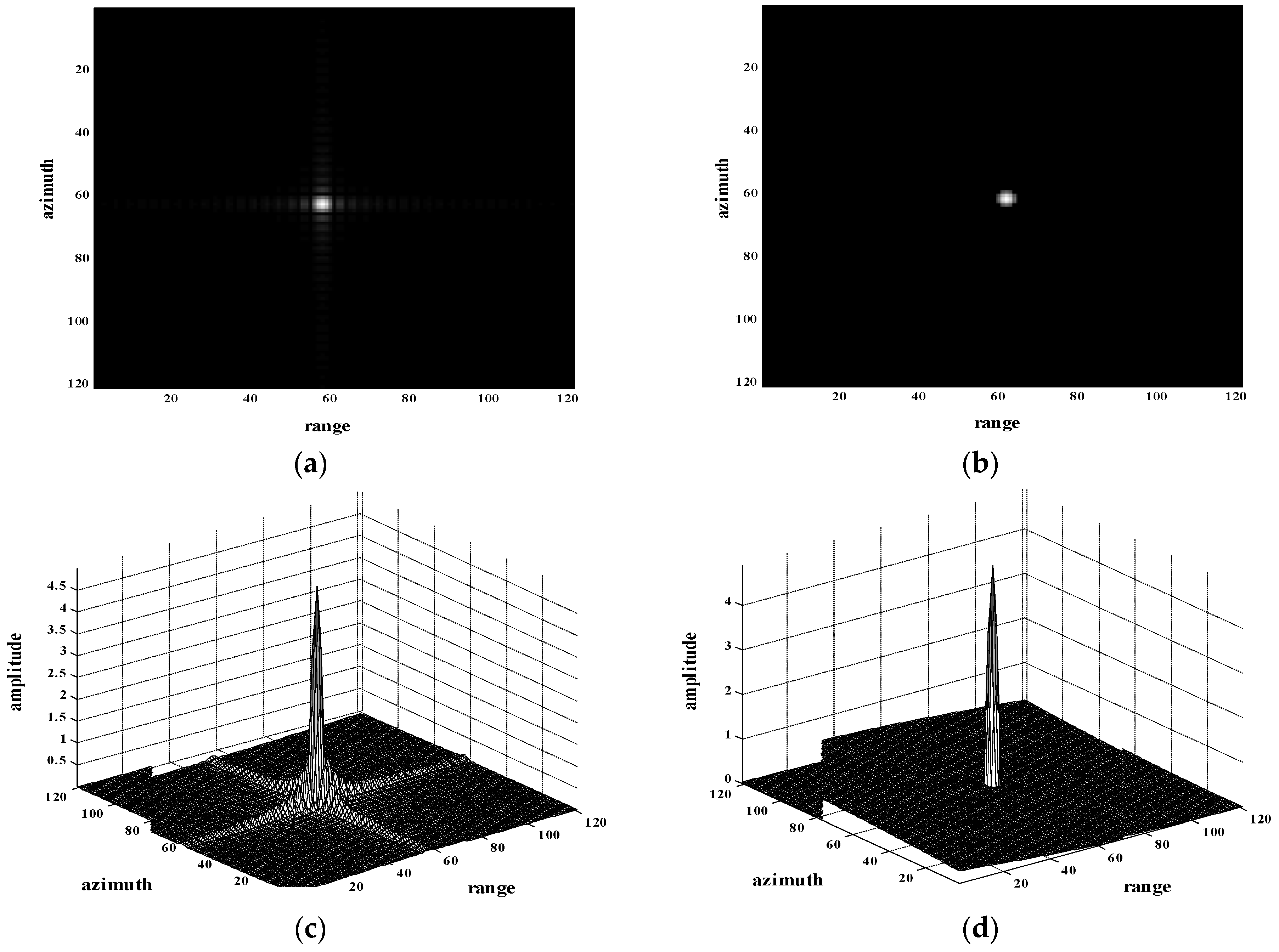
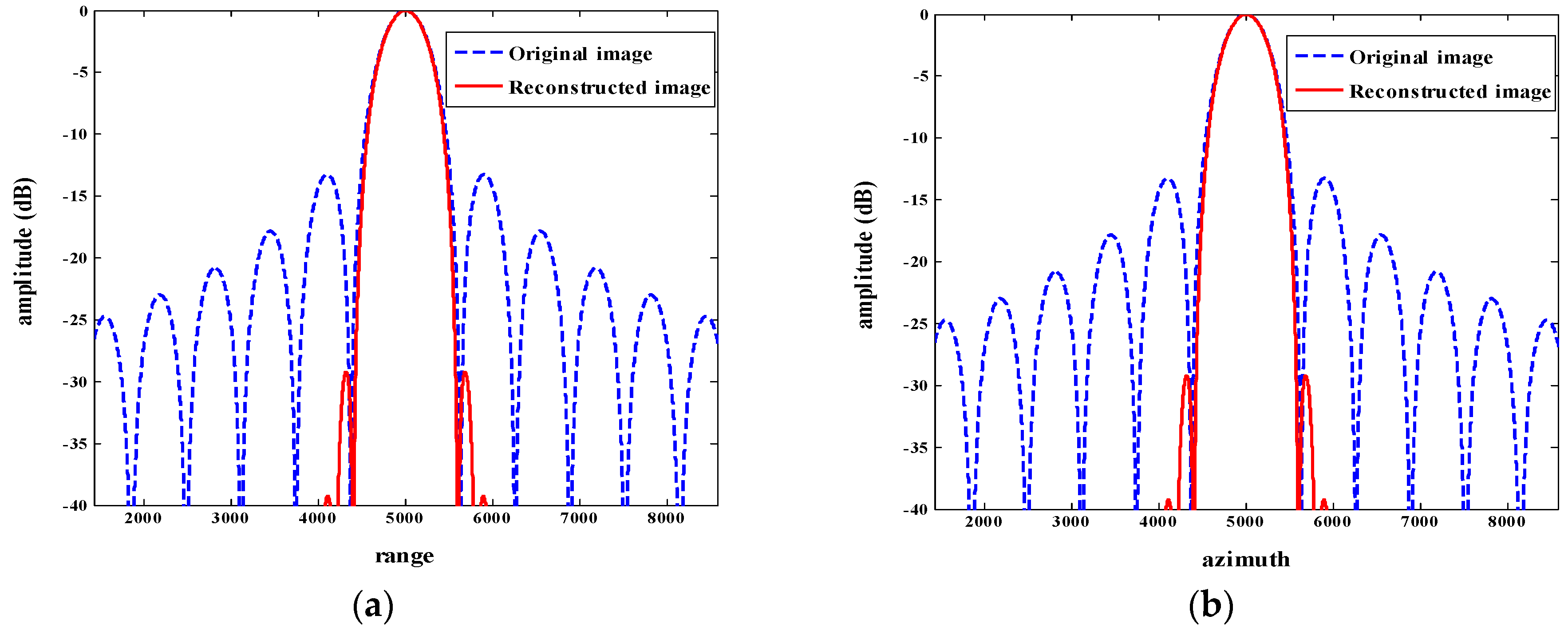
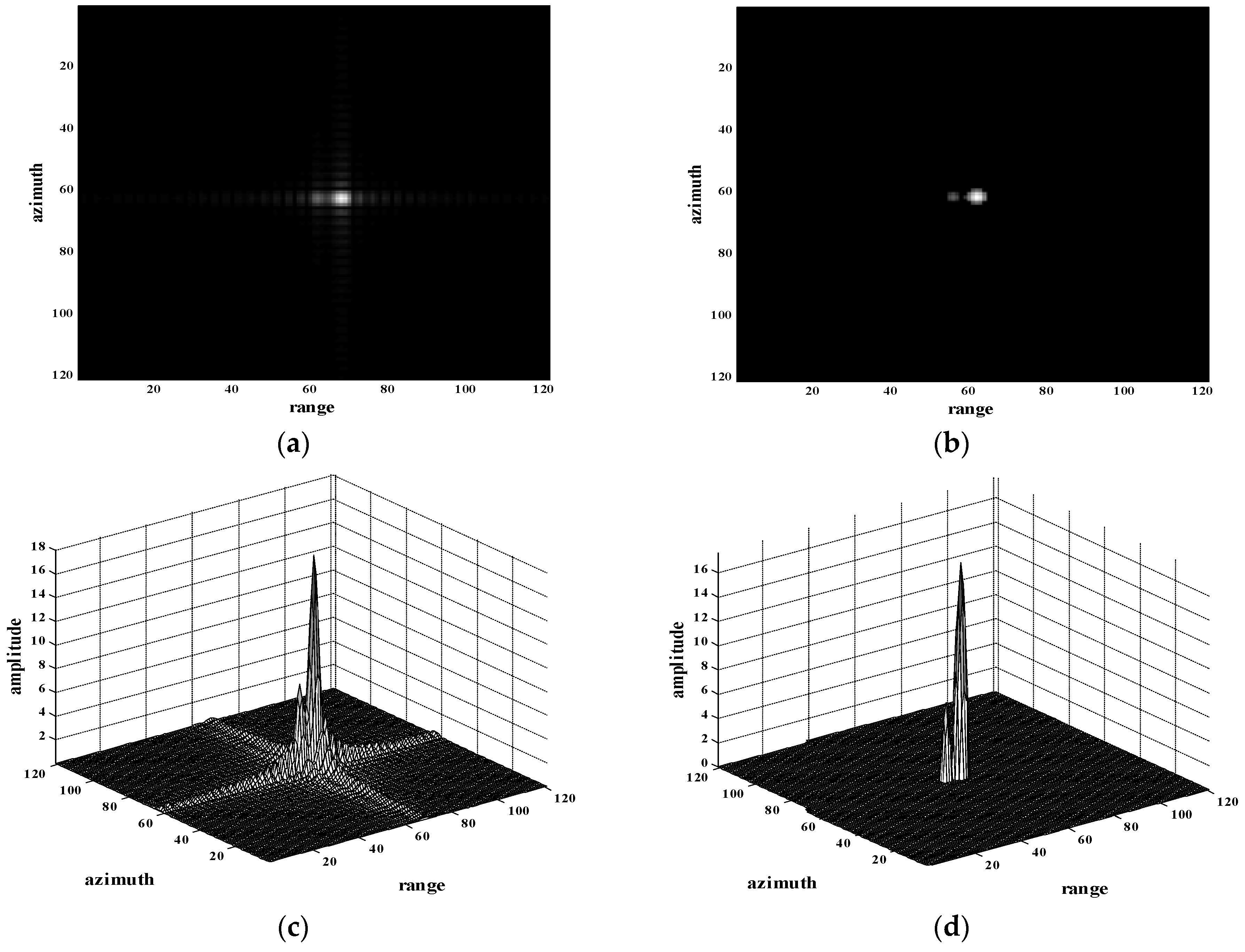
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cumming, I.G.; Wrong, H.C. Digital processing of synthetic aperture radar data: Algorithms and implementation. In Proceedings of the International Radar Conference, Arlington, VA, USA, 28–30 April 1980. [Google Scholar]
- Chan, Y.K.; Koo, V.C. An introduction to synthetic aperture radar (SAR). Prog. Electromagn. Res. B 2008, 2, 629–635. [Google Scholar] [CrossRef]
- Moreira, A.; Mittermayer, J.; Scheiber, R. Extended chirp scaling algorithm for air and spaceborne SAR data processing in stripmap and ScanSAR imaging models. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1123–1136. [Google Scholar] [CrossRef]
- Degraaf, S.R. Sidelobe reduction via adaptive fir filtering in SAR imagery. IEEE Trans. Image Process. 1994, 3, 292–301. [Google Scholar] [CrossRef] [PubMed]
- Stankwitz, H.C.; Dallaire, R.J.; Fienup, J.R. Nonlinear apodization for sidelobe control in SAR imagery. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 267–279. [Google Scholar] [CrossRef]
- Smith, B.H. An analytic nonlinear approach to sidelobe reduction. IEEE Trans. Image Process. 2001, 10, 1162–1168. [Google Scholar] [CrossRef] [PubMed]
- Fischer, J.; Pupeza, E.P.I.; Scheiber, R. Sidelobe suppression using SVA method for SAR images and sounding radars. In Proceedings of the European Conference on Synthetic Aperture Radar (EUSAR), Dresden, Germany, 16–18 May 2006. [Google Scholar]
- Protter, M.; Yavbeh, L. Closed-form MMSE estimation for signal denoising under sparse representation modeling over a unitary dictionary. IEEE Trans. Signal Process. 2010, 58, 3471–3484. [Google Scholar] [CrossRef]
- Moulin, P.; Liu, J. Analysis of multiresolution image denoising schemes generalized-Gaussian priors. IEEE Trans. Inf. Theory 1999, 45, 909–919. [Google Scholar] [CrossRef]
- Aharon, M.; Elad, M.; Bruckstein, A.M. The K-SVD: An algorithm for designing overcomplete dictionaries for sparse representation. IEEE Trans. Signal Process. 2006, 54, 4311–4322. [Google Scholar] [CrossRef]
- Donoho, L. Super-resolution via sparse representation. IEEE Trans. Image Process. 2010, 19, 2861–2873. [Google Scholar] [CrossRef]
- Delaurentis, M.; Dickey, F.M. Regularization Analysis of SAR Super-Resolution; Report: SAND2002-1020; Sandia National Laboratories: Livermore, CA, USA, 2002; Volume 3.
- Herman, M.A.; Strohmer, T. High-resolution radar via compressed sensing. IEEE Trans. Signal Process. 2009, 57, 2275–2284. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 24, 1289–1306. [Google Scholar] [CrossRef]
- Baraniuk, R.G.; Cevher, V.; Duarte, M.F. Model-based compressive sensing. IEEE Trans. Inf. Theory 2010, 56, 1982–2001. [Google Scholar] [CrossRef]
- Baraniuk, R.G.; Steeghs, P. Compressive radar imaging. In Proceedings of the IEEE Radar Conference, Boston, MA, USA, 17–20 April 2007. [Google Scholar]
- Candes, E.J.; Emmanuel, J. The restricted isometry property and its implications for compressed sensing. C. R. Math. 2008, 346, 589–592. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Duarte, M.F.; Davenport, M.A.; Takhar, D. Single-pixel imaging via compressive sampling. IEEE Signal Process. Mag. 2008, 25, 83–91. [Google Scholar] [CrossRef]
- Tralic, D.; Grgic, S. Signal reconstruction via compressive sensing. In Proceedings of the ELMAR, Zadar, Croatia, 14–16 September 2011. [Google Scholar]
- Du, X.; Hu, W.; Yu, W.A. A criterion for the construction of a regularization function in sparse component analysis. Circuits Syst. Signal Process. 2005, 24, 315–325. [Google Scholar] [CrossRef]
- Cetin, M.; Karl, W.C.; Castanon, D.A. Evaluation of a regularized SAR imaging technique based on recognition-oriented feature. Proc. SPIE 2000, 4053, 40–51. [Google Scholar] [CrossRef]
- Letsch, K.; Berens, P. PSLR estimation for SAR systems with consideration of clutter background. Proc. SPIE 2005, 5980, 13–22. [Google Scholar] [CrossRef]
- Bogler, P.L. Motion-compensated SAR image ISLR. IEEE Trans. Geosci. Remote Sens. 1987, 25, 871–878. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Single Point Target | PSLR in Range Direction | PSLR in Azimuth Direction |
|---|---|---|
| Original image | −13.2584 dB | −13.2584 dB |
| Reconstructed image | −29.2276 dB | −29.2276 dB |
| PSLR difference | −15.9691 dB | −15.9691 dB |
| Lowered percentage | 120.45% | 120.45% |
| Single Point Target | ISLR in Range Direction | ISLR in Azimuth Direction |
|---|---|---|
| Original image | −10.2826 dB | −10.2826 dB |
| Reconstructed image | −33.1467 dB | −33.1467 dB |
| ISLR difference | −22.8641 dB | −22.8641 dB |
| Lowered percentage | 222.36% | 222.36% |
| Parameters | Range Direction | Azimuth Direction |
|---|---|---|
| MM | 97.84% | 97.84% |
| Parameters | Point Target |
|---|---|
| AE | 2.52% |
| PE/rad |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, X.; He, F.; Ye, F.; Dong, Z.; Wu, M. Sidelobe Suppression with Resolution Maintenance for SAR Images via Sparse Representation. Sensors 2018, 18, 1589. https://doi.org/10.3390/s18051589
Zhu X, He F, Ye F, Dong Z, Wu M. Sidelobe Suppression with Resolution Maintenance for SAR Images via Sparse Representation. Sensors. 2018; 18(5):1589. https://doi.org/10.3390/s18051589
Chicago/Turabian StyleZhu, Xiaoxiang, Feng He, Fan Ye, Zhen Dong, and Manqing Wu. 2018. "Sidelobe Suppression with Resolution Maintenance for SAR Images via Sparse Representation" Sensors 18, no. 5: 1589. https://doi.org/10.3390/s18051589
APA StyleZhu, X., He, F., Ye, F., Dong, Z., & Wu, M. (2018). Sidelobe Suppression with Resolution Maintenance for SAR Images via Sparse Representation. Sensors, 18(5), 1589. https://doi.org/10.3390/s18051589