A Novel Displacement and Tilt Detection Method Using Passive UHF RFID Technology


Abstract
:1. Introduction
2. Materials and Methods
2.1. Model
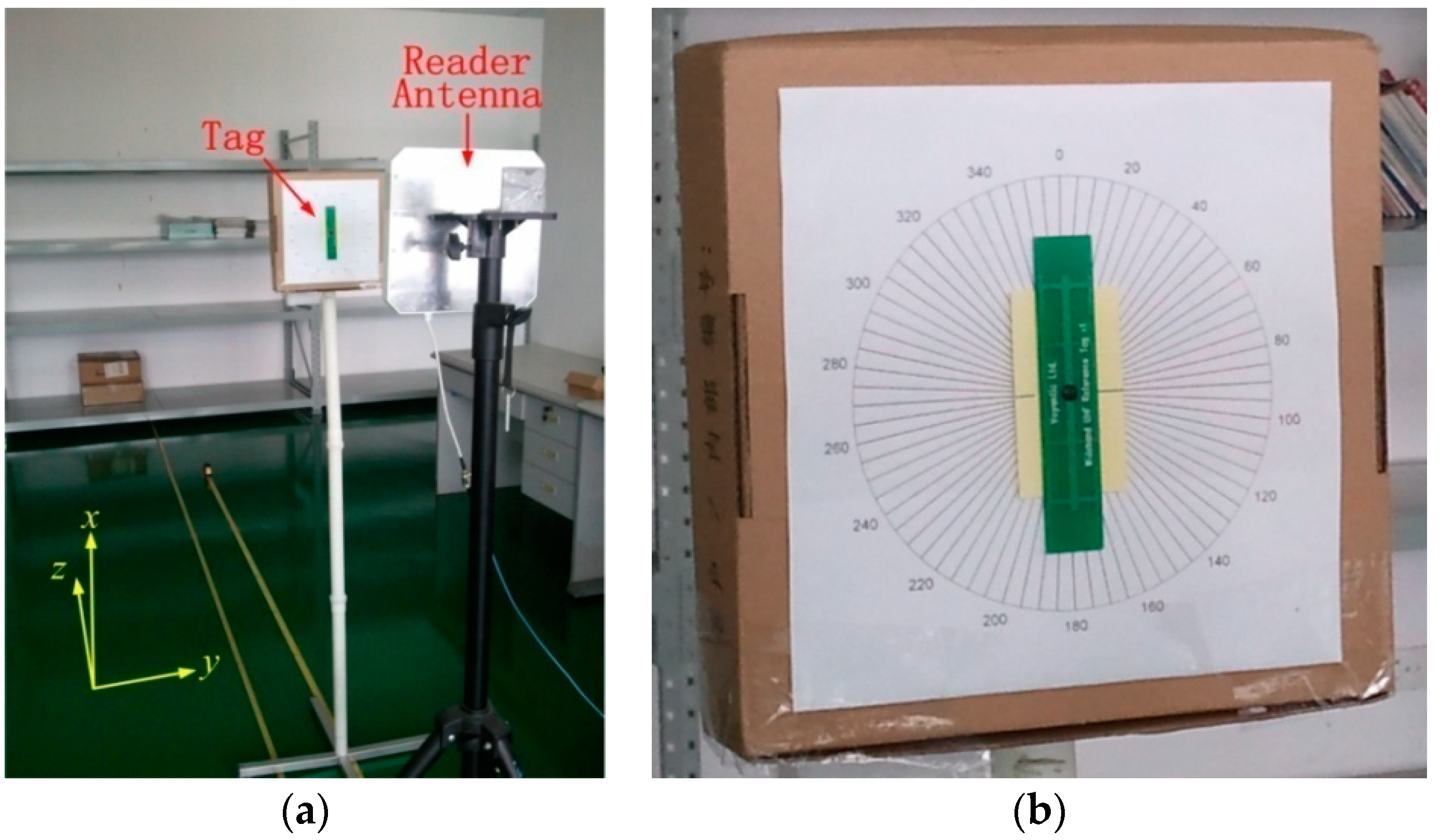
2.2. Experimental Setup
3. Results
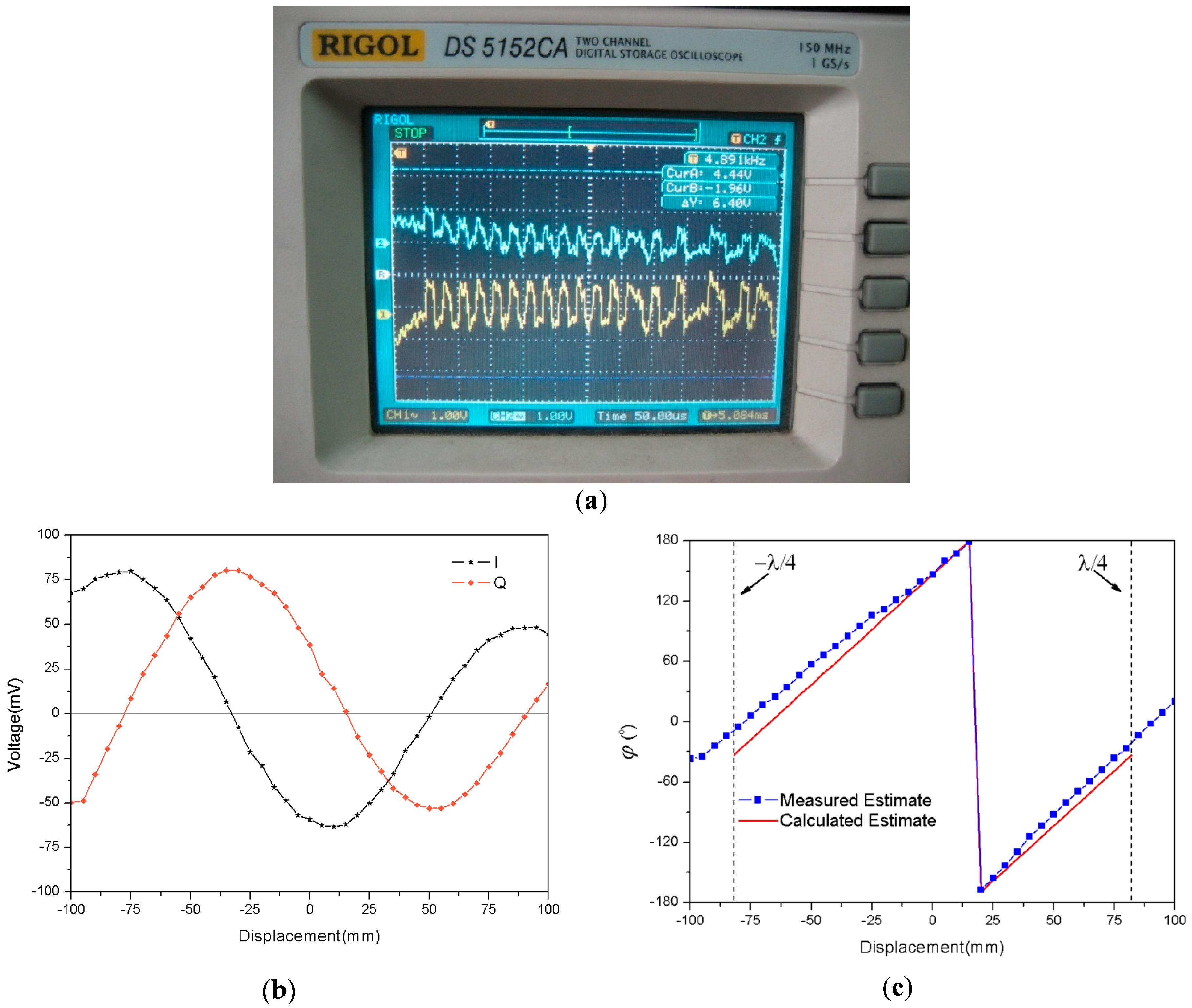
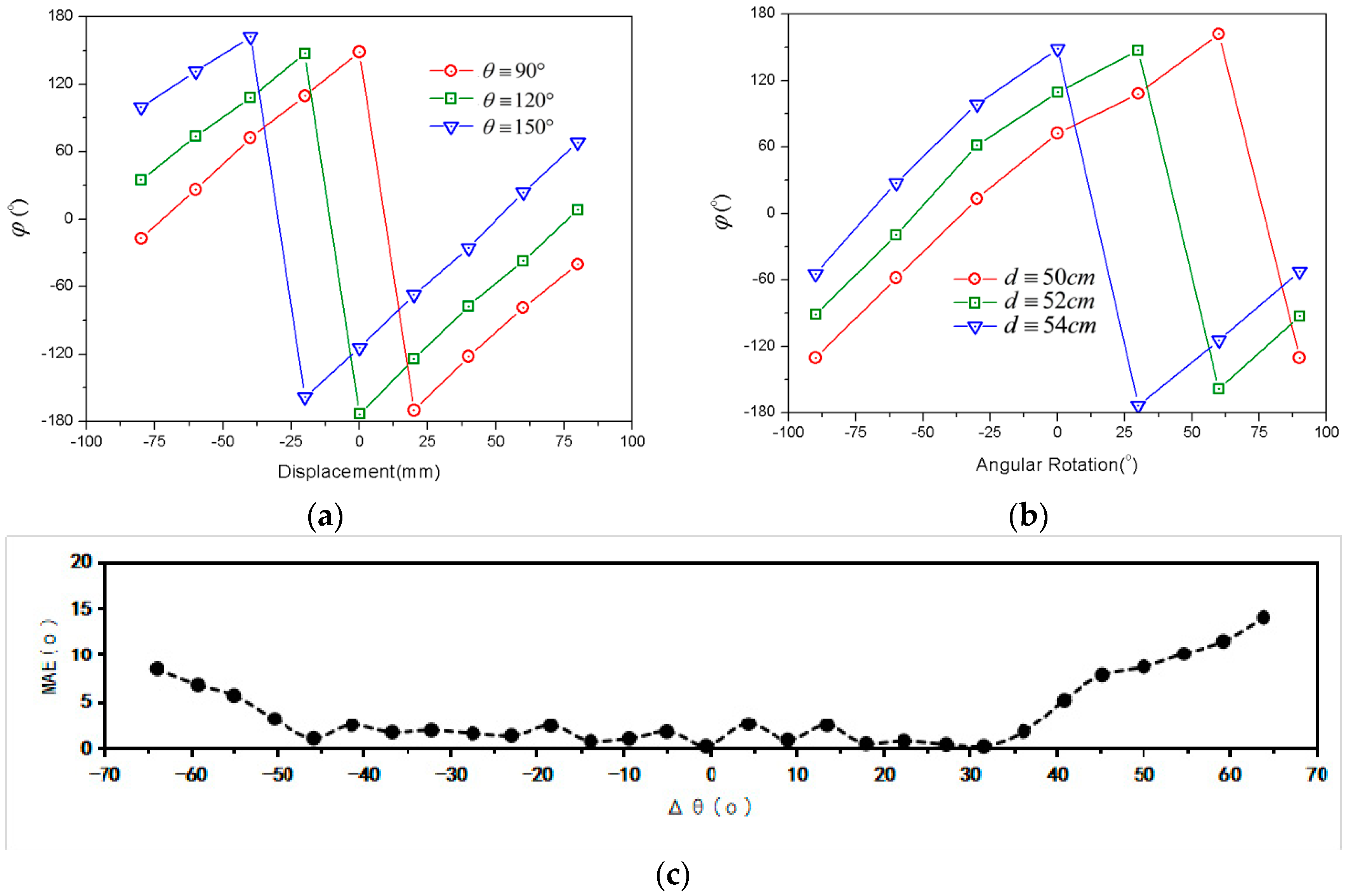
3.1. Displacement Experiment
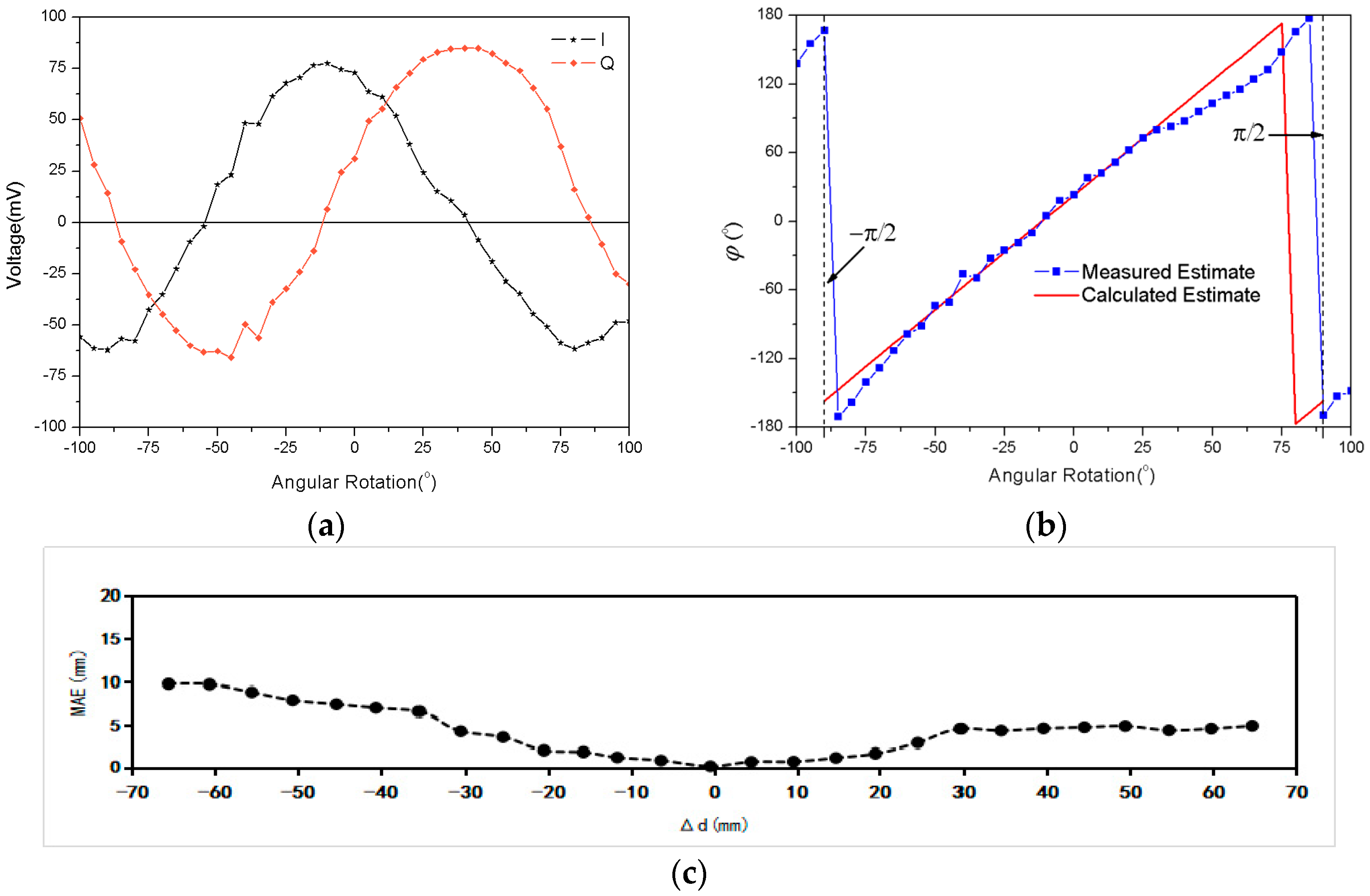
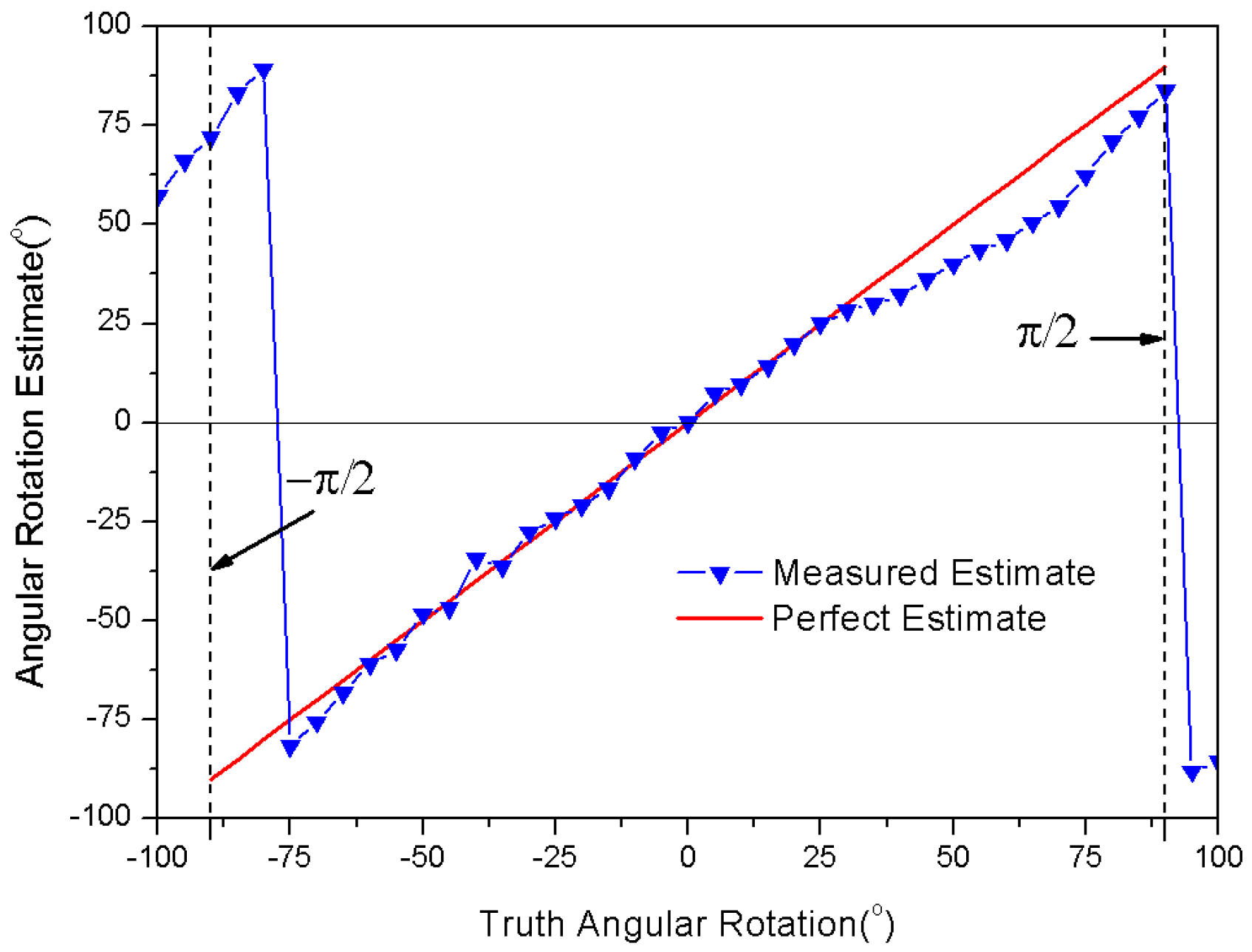
3.2. Tilt Angle Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Komninos, N. Intelligent Cities; Spon Press London: London, UK, 2003. [Google Scholar]
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Musa, A.; Gunasekaran, A.; Yusuf, Y. Supply chain product visibility: Methods, systems and impacts. Expert Syst. Appl. 2014, 41, 176–194. [Google Scholar] [CrossRef]
- Chang, P.C.; Flatau, A.; Liu, S.C. Review paper: Health monitoring of civil infrastructure. Struct. Health Monit. 2003, 2, 257–267. [Google Scholar] [CrossRef]
- Bhuiyan, M.Z.A.; Wang, G.; Cao, J. Deploying wireless sensor networks with fault-tolerance for structural health monitoring. IEEE Trans. Comput. 2015, 64, 382–395. [Google Scholar] [CrossRef]
- Evers, L.; Havinga, P.J.M.; Kuper, J. SensorScheme: Supply chain management automation using wireless sensor networks. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation, Patras, Greece, 25–28 September 2007. [Google Scholar]
- Finkenzeller, K.; Waddington, R. RFID Handbook: Radio-Frequency Identification Fundamentals and Applications, 2nd ed.; Wiley: New York, NY, USA, 2004. [Google Scholar]
- Kim, S.; Mariotti, C.; Alimenti, F.; Mezzanotte, P.; Georgiadis, A.; Collado, A.; Roselli, L.; Tentzeris, M.M. No battery required: Perpetual RFID-enabled wireless sensors for cognitive intelligence applications. IEEE Microw. Mag. 2013, 14, 66–77. [Google Scholar] [CrossRef]
- Occhiuzzi, C.; Caizzone, S.; Marrocco, G. Passive UHF RFID antennas for sensing applications: Principles, methods and classifications. IEEE Antennas Propag. Mag. 2013, 55, 14–34. [Google Scholar] [CrossRef]
- Chang, K.; Kim, Y.-H.; Kim, Y.-J.; Yoon, Y.J. Functional antenna integrated with relative humidity sensor using synthesised polyimide for passive RFID sensing. Electron. Lett. 2007, 43, 259–260. [Google Scholar] [CrossRef]
- Manzari, S.; Occhiuzzi, C.; Nawale, S.; Catini, A.; Di Natale, C.; Marrocco, G. Polymer-doped UHF RFID tag for wireless-sensing of humidity. In Proceedings of the IEEE International Conference on RFID (RFID), Orlando, FL, USA, 3–5 April 2012. [Google Scholar]
- Sauer, S.; Fischer, W.J. An irreversible single-use humidity-threshold monitoring sensor principle for wireless passive sensor solutions. IEEE Sens. J. 2016, 16, 6920–6930. [Google Scholar] [CrossRef]
- Siddiqui, A.; Mahboob, R.; Islam, T. A passive wireless tag with digital readout unit for wide range humidity measurement. IEEE Trans. Instrum. Meas. 2017, 66, 1013–1020. [Google Scholar] [CrossRef]
- Bhattacharyya, R.; Floerkemeier, C.; Sarma, S.; Deavours, D. RFID tag antenna based temperature sensing. In Proceedings of the IEEE International Conference on RFID (RFID), Orlando, FL, USA, 14–16 April 2010. [Google Scholar]
- Babar, A.A.; Manzari, S.; Sydanheimo, L.; Elsherbeni, A.Z.; Ukkonen, L. Passive UHF RFID tag for heat sensing applications. IEEE Trans. Antennas Propag. 2012, 60, 4056–4064. [Google Scholar] [CrossRef]
- Vena, A.; Sydänheimo, L.; Tentzeris, M.M.; Ukkonen, L. A fully inkjet-printed wireless and chipless sensor for CO2 and temperature detection. IEEE Sens. J. 2015, 15, 89–99. [Google Scholar] [CrossRef]
- Abad, E.; Zampolli, S.; Marco, S.; Scorzoni, A.; Mazzolai, B.; Juarros, A.; Gómez, D.; Elmi, I.; Cardinali, G.C.; Gómez, J.M. Flexible tag micro lab development: Gas sensors integration in RFID flexible tags for food logistic. Sens. Actuators B 2007, 127, 2–7. [Google Scholar] [CrossRef] [Green Version]
- Occhiuzzi, C.; Rida, A.; Marrocco, G.; Tentzeris, M. RFID passive gas sensor integrating carbon nanotubes. IEEE Trans. Microw. Theory Tech. 2011, 59, 2674–2684. [Google Scholar] [CrossRef] [Green Version]
- Occhiuzzi, C.; Paggi, C.; Marrocco, G. Passive RFID strain-sensor based on meander-line antennas. IEEE Trans. Antennas Propag. 2011, 59, 4836–4840. [Google Scholar] [CrossRef] [Green Version]
- Occhiuzzi, C.; Marrocco, G. Constrained-design of passive UHF RFID sensor antennas. IEEE Trans. Antennas Propag. 2013, 61, 2972–2980. [Google Scholar] [CrossRef] [Green Version]
- Chin, J.-C.; Rautenberg, J.M.; Ma, C.Y.; Pujol, S.; Yau, D.K. An experimental low-cost, low-data-rate rapid structural assessment network. IEEE Sens. J. 2009, 9, 1361–1369. [Google Scholar] [CrossRef]
- Suwalak, R.; Phongcharoenpanich, C.; Torrungrueng, D.; Krairiksh, M. Determination of dielectric property of construction material products using a novel RFID sensor. Prog. Electromagn. Res. 2012, 130, 601–617. [Google Scholar] [CrossRef]
- Cook, B.S.; Cooper, J.R.; Tentzeris, M.M. An inkjet-printed microfluidic RFID-enabled platform for wireless lab-on-chip applications. IEEE Trans. Microw. Theory Tech. 2013, 61, 4714–4723. [Google Scholar] [CrossRef]
- Occhiuzzi, C.; Marrocco, G. Precision and accuracy in UHF-RFID power measurements for passive sensing. IEEE Sens. J. 2016, 16, 3091–3098. [Google Scholar] [CrossRef]
- Okada, M. Mitigation of detection error in RFID-based in-body localization system. In Proceedings of the 9th Biomedical Engineering International Conference (BMEiCON), Luang Prabang, Laos, 7–9 December 2016. [Google Scholar]
- Kalansuriya, P.; Bhattacharyya, R.; Sarma, S. RFID tag antenna-based sensing for pervasive surface crack detection. IEEE Sens. J. 2013, 13, 1564–1570. [Google Scholar] [CrossRef]
- Paolini, G.; del Prete, M.; Berra, F.; Masotti, D.; Costanzo, A. An agile and accurate microwave system for tracking elderly people occupancy at home. In Proceedings of the IEEE MTT-S Latin America Microwave Conference (LAMC), Puerto Vallarta, Mexico, 12–14 December 2016. [Google Scholar]
- Caizzone, S.; DiGiampaolo, E.; Marrocco, G. Wireless crack monitoring by stationary phase measurements from coupled RFID tags. IEEE Trans. Antennas Propag. 2014, 62, 6412–6419. [Google Scholar] [CrossRef]
- Wang, C.; Xie, L.; Wang, W.; Xue, T.; Lu, S. Moving tag detection via physical layer analysis for large-scale RFID systems. In Proceedings of the IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Wegener, M.; Froß, D.; Rößler, M.; Drechsler, C.; Pätz, C.; Heinkel, U. Relative localisation of passive UHF-tags by phase tracking. In Proceedings of the International Multi-Conference on Systems, Signals & Devices (SSD), Leipzig, Germany, 21–24 March 2016. [Google Scholar]
- Genovesi, S.; Costa, F.; Borgese, M.; Monorchio, A.; Manara, M. Chipless RFID tag exploiting cross polarization for angular rotation sensing. In Proceedings of the 2016 IEEE International Conference on Wireless for Space and Extreme Environments (WiSEE), Aachen, Germany, 26–28 September 2016. [Google Scholar]
- Ahmed, R.; Avaritsiotis, J.N. The propagation parameters on RFID-localization accuracy. In Proceedings of the Science and Information Conference (SAI), London, UK, 28–30 July 2015. [Google Scholar]
- Khanam, S.; Mahbub, M.; Mandal, A.; Kaiser, M.S.; Mamun, S.A. Improvement of RFID tag detection using smart antenna for tag based school monitoring system. In Proceedings of the International Conference on Electrical Engineering and Information & Communication Technology, Dhaka, Bangladesh, 10–12 April 2014. [Google Scholar]
- Rizzoli, V.; Costanzo, A.; Montanari, E.; Benedetti, A. A new wireless displacement sensor based on reverse design of microwave and millimeter-wave antenna array. IEEE Sens. J. 2009, 9, 1557–1566. [Google Scholar] [CrossRef]
- Han, J.; Qian, C.; Wang, X.; Ma, D.; Zhao, J.; Zhang, P.; Xi, W.; Jiang, Z. Twins: Device-free object tracking using passive tags. In Proceedings of the IEEE/ACM Transactions on Networking, Toronto, ON, Canada, 27 April–2 May 2014. [Google Scholar]
- Caizzone, S.; Giampaolo, E.D.; Marrocco, G. Setup-independent phase-based sensing by UHF RFID. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 2408–2411. [Google Scholar] [CrossRef]
- Cazeca, M.J.; Mead, J.; Chen, J.; Nagarajan, R. Passive wireless displacement sensor based on RFID technology. Sens. Actuators A 2013, 190, 197–202. [Google Scholar] [CrossRef]
- Cook, B.S.; Shamim, A.; Tentzeris, M.M. Passive low-cost inkjet-printed smart skin sensor for structural health monitoring. IET Microw. Antennas Propag. 2012, 6, 1536–1541. [Google Scholar] [CrossRef]
- Becker, J.; Trotter, M.S.; Griffin, J.D. Passive displacement sensing using backscatter RFID with multiple loads. In Proceedings of the IEEE SENSORS, Baltimore, MD, USA, 3–6 November 2013. [Google Scholar]
- Paggi, C.; Occhiuzzi, C.; Marrocco, G. Sub-millimeter displacement sensing by passive UHF RFID antennas. IEEE Trans. Antennas Propag. 2014, 62, 905–912. [Google Scholar] [CrossRef] [Green Version]
- Perret, E. Displacement sensor based on radar cross-polarization measurements. IEEE Trans. Microw. Theory Tech. 2017, 65, 955–966. [Google Scholar] [CrossRef]
- UHF. Frequency Regulations—GS1. Available online: http://www.gs1.org/docs/epcglobal/UHF_Regulations.pdf (accessed on 20 May 2018).
- Krigslund, R.; Popovski, P.; Pedersen, G.F. Orientation sensing using multiple passive rfid tags. IEEE Antennas Wirel. Propag. Lett. 2012, 11, 176–179. [Google Scholar] [CrossRef]
- Gupta, G.; Singh, B.P.; Bal, A. Orientation detection using passive UHF RFID technology. IEEE Aantennas Propag. Mag. 2014, 56, 221–237. [Google Scholar] [CrossRef]
- Krigslund, R.; Dosen, S.; Popovski, P. A novel technology for motion capture using passive UHF RFID tags. IEEE Trans. Biomed. Eng. 2013, 60, 1453–1457. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhang, Y.; Amin, M.G. Multi frequency-based range estimation of RFID tags. In Proceedings of the IEEE International Conference on RFID (RFID), Orlando, FL, USA, 27–28 April 2009. [Google Scholar]
- Nikitin, P.V.; Martinez, R.; Ramamurthy, S.; Leland, H.; Spiess, G.; Rao, K. Phase based spatial identification of UHF RFID tags. In Proceedings of the IEEE International Conference on RFID (RFID), Orlando, FL, USA, 14–16 April 2010. [Google Scholar]
- Circular Polarity RFID Panel Antenna S9028PCL S9028PCR. Available online: https://assets.lairdtech.com/home/brandworld/files/ANT-DS-S9028PCL%20S9028PCR-0515.pdf (accessed on 20 May 2018).
- Field Engineer Kit. Available online: http://voyantic.com/products/tagformance-pro/accessories/field-engineer-kit (accessed on 20 May 2018).
- Balanis, C.A. Antenna Theory: Analysis and Design, 3rd ed.; Wiley: New York, NY, USA, 2005. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement Methods | Displacement Sensing | Tilt Angle Sensing | Measurement Precision of Displacement | Measurement Precision of Tilt Angle |
|---|---|---|---|---|
| Double phase difference [36] | Yes | NA | 6° (phase) 1 | NA |
| Transmitted power monitoring [37] | Yes | NA | 2% (Power) 1 | NA |
| Received signal strength [43] | NA | Yes | NA | 7° |
| Antenna polarization [44] | NA | Yes | NA | 15° |
| [this paper] | Yes | Yes | 2 mm | 2.5° |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, X.; Cai, Z.; Xie, Z.; Zhu, H. A Novel Displacement and Tilt Detection Method Using Passive UHF RFID Technology. Sensors 2018, 18, 1644. https://doi.org/10.3390/s18051644
Lai X, Cai Z, Xie Z, Zhu H. A Novel Displacement and Tilt Detection Method Using Passive UHF RFID Technology. Sensors. 2018; 18(5):1644. https://doi.org/10.3390/s18051644
Chicago/Turabian StyleLai, Xiaozheng, Zhirong Cai, Zeming Xie, and Hailong Zhu. 2018. "A Novel Displacement and Tilt Detection Method Using Passive UHF RFID Technology" Sensors 18, no. 5: 1644. https://doi.org/10.3390/s18051644
APA StyleLai, X., Cai, Z., Xie, Z., & Zhu, H. (2018). A Novel Displacement and Tilt Detection Method Using Passive UHF RFID Technology. Sensors, 18(5), 1644. https://doi.org/10.3390/s18051644