Analyzing Cyber-Physical Threats on Robotic Platforms †

 ,
,  , , and
, , and
Abstract
:1. Introduction
- Analyze several cyber-physical security threats, which target the communication link between Adept mobile robots research/academic platforms and their clients or users [17].
- Improve safety and security of the robotic platforms, raise awareness and increase understanding of the emerging threats on the robotic platforms.
- Analyzed and utilized vulnerabilities in the communication link and other vulnerabilities that we discovered in MobileEyes/arnlServer client/server robotic applications. Those applications are necessary to establish the network connection between Adept mobile robots and their clients or users [18].
- Focused our analysis on possible security and privacy issues related to mapping and localization robotic scenario.
- Targeted three major security requirements, integrity, availability, and confidentiality, using an impact-oriented approach.
- Developed a novel robot attack tool (RAT) responsible for carrying out security attacks on integrity, availability, and confidentiality.
- Performed two risk assessment evaluation setups: a simulation-based approach using MobileSim simulator, and a real-life evaluation using the PeopleBotTM [17]. The risk level of threats were qualitatively assessed (i.e., low, moderate, and high).
- Identified possible physical consequences from integrity, availability, and confidentiality attacks.
- Suggested numerous mitigation techniques to reduce or prevent the risk of attacks.
2. Related Work
- identification of possible security and privacy threats against many modalities of robotic systems;
- evaluation of impact of the identified threats in a systematic manner; and
- prevention and mitigation of the threats.
- It presents a thorough summary from literature about the studies, which targeted security threat analysis and detection for several robot platforms or CPSs.
- It analyzes three different security requirements of the robot: integrity, availability and confidentiality. In contrast, the prior work only analyzed the availability security requirement.
- It exploits vulnerabilities in the robotic software that are unique to the robotic platforms; we analyze the cyber-physical security threats on the robotic platforms that specifically use the MobileEyes/arnlServer client/server applications, and we do not only exploit general vulnerabilities in operating systems that actually run on the robotic platforms (the prior work).
- While in [10] the security risk assessment was only performed physically on the robot, in this paper, we extend that by performing the assessment both physically on the robot and in simulation using MobileSim robot simulator.
- In this paper, we develop a robot attack tool (RAT) to perform several attacks on the client/robot communication stream, which we provided to the community as an open source code [47].
- We analyze three different security objectives of the robot: integrity, availability and confidentiality.
- We apply a systematic methodology for risk assessment based on NIST adversarial risk assessment template proposed in [48].
- We develop a robot attack tool (RAT) to perform several attacks on the client/robot communication stream. This affects the integrity and availability security requirements of the robot.
- We provide RAT tool to the community as an open source code [47].
- We identify weaknesses and vulnerabilities in the robotic software (MobileEyes/arnlServer). To the best of our knowledge, this is the first study to address vulnerabilities in the robotic software of Adept MobileRobots platforms.
3. Robotic Platform and Software
3.1. The Robot Platform
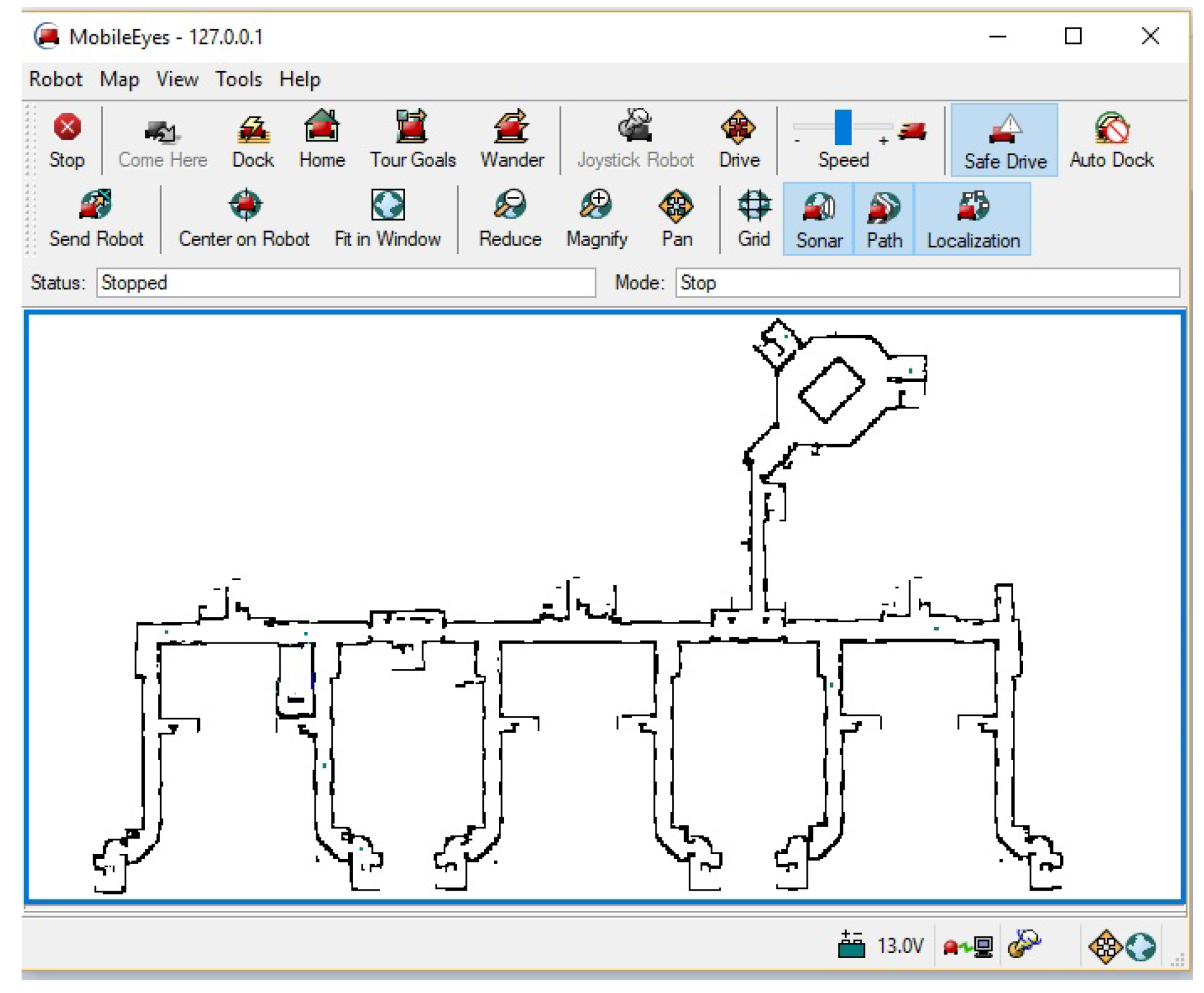
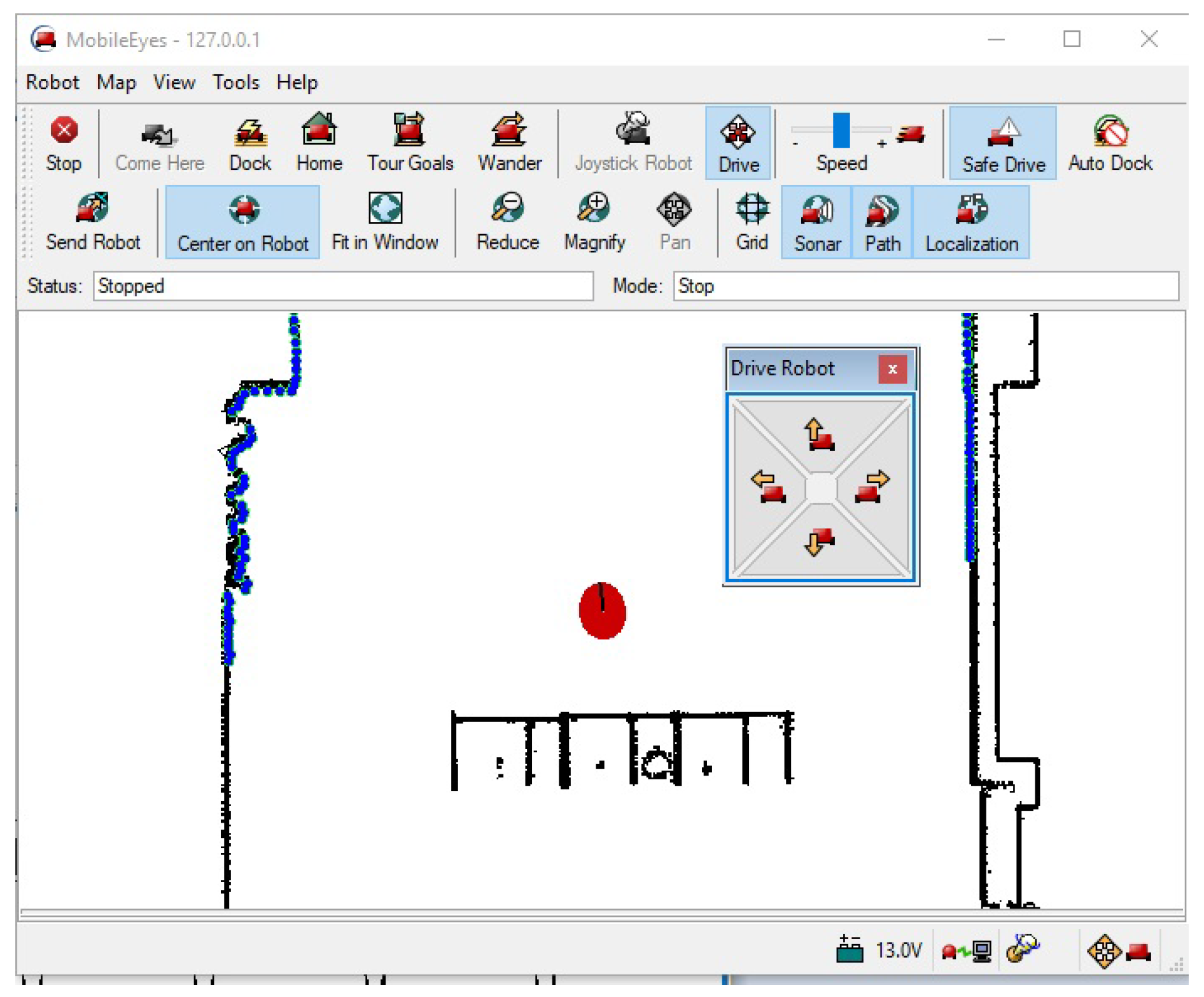
3.1.1. MobileEyes
- The port number is published and known. Thus, using any of the packet sniffing tools on the robot network, an attacker can determine the existence of the robot connection on the network by looking for port 7272.
- By default, the user does not need to specify a user or password to connect to the server, which can allow an attacker to login and connect to the robot by accessing the network and knowing the robot IP address.
- Even if the robot server is configured to require login credentials, the username information gets authenticated with the server as a plain-text without being encrypted. Thus, an attacker can easily figure out such information by packet sniffing the traffic stream between MobileEyes and the server. Additionally, the password get authenticated using MD5 hash coding scheme, which suffers from extensive vulnerabilities [52,53].
- If MobileEyes loses connection during a session, it can be configured using the pop-up dialog displayed in Figure 3 to reconnect automatically. Consequently, this allows an attacker to perform a MITM attack on the robot without being disconnected from the client side.
3.1.2. arnlServer
- By default, the server is not configured to require the user (or client) to specify a username or password to connect to it. An attacker could potentially login and connect to the robot when accessing the robot network and providing the robot IP address.
- Even if the robot server is configured to require login credentials, the username information is sent as a plain-text without being encrypted, and the password is hashed using vulnerable MD5 hash coding scheme and sent over the network to the server.
- If the client connection with the server gets lost, say, due to bad network connection, then it will be restored automatically once the connection stream becomes okay without the need to explicitly reconnect again. Thus, if an attacker (e.g., in a MITM attack) interrupts the connection between the server (robot) and client for some time, then this might look like a bad network connection without anything noticed or any action taken from the server and the client.
- Most of the information sent from the server side to the client (i.e., robot position, laser data, and camera images) is sent in plain-text. Thus, a possible integrity attack might manipulate such information and result in serious damage to the physical robot and the surrounding environment.
3.2. The MobileSim Simulation Environment
4. Risk Assessment of the Robotic Platform
4.1. Attack Analysis
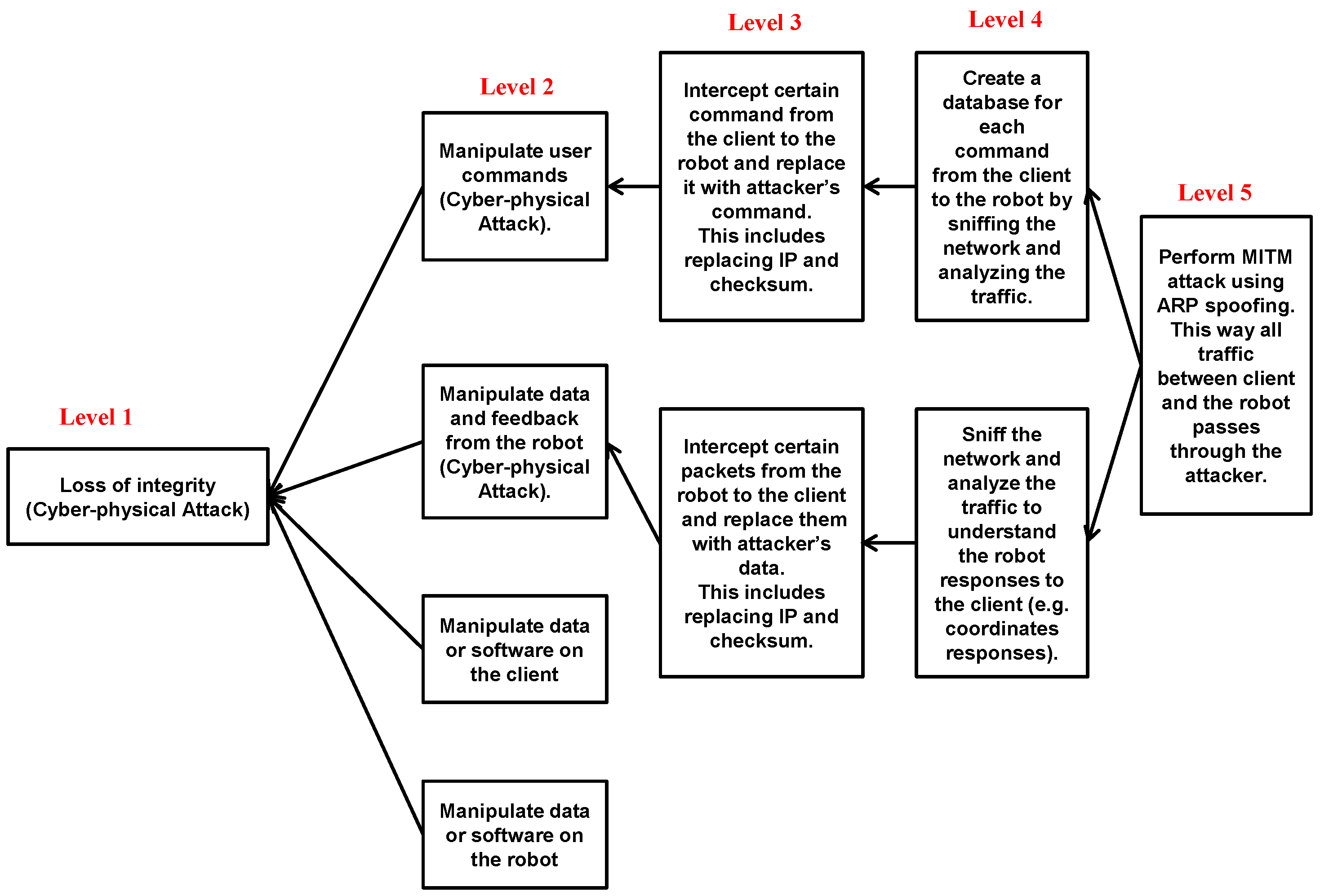
4.1.1. Analysis of Integrity Attacks
- Manipulate the traffic from the client to the robot.
- Manipulate the traffic from the robot to the client.
- Manipulate the data or software on the client.
- Manipulate the data or software on the robot.
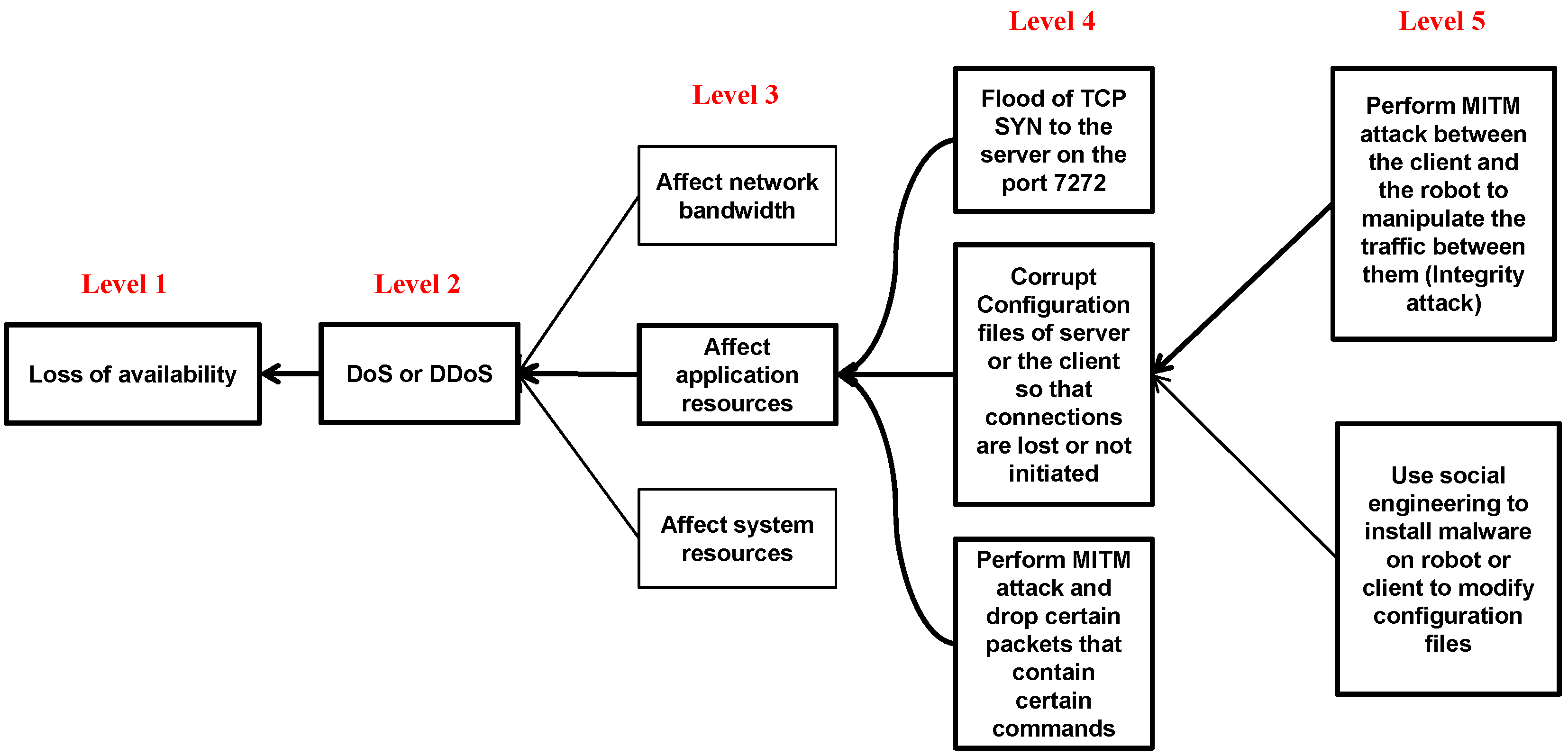
4.1.2. Analysis of Availability Attacks
- States of integrity attacks:
- -
- mirror: Reverse the direction of the movement of the robot; change right command to left, and left command to right.
- -
- send_to_position: Replace any command by a command that forces the robot to go to a certain position of the attacker’s choice.
- -
- circulate: Replace any command by a command that forces the robot to circulate in one direction (left).
- -
- fake_position: Modify robot position sent to the client.
- State of an availability attack:
- -
- availability_attack: Drop the packets in any direction between the client and the robot rendering the robot unavailable.
| Algorithm 1 MITM Algorithm Implemented by RAT | |
| 1: | procedure Man-in-the-middle Attack |
| 2: | State ← {mirror, send_to_position, circulate, fake_position, availability_attack} |
| 3: | Sniff packet |
| 4: | if packet from client to robot then |
| 5: | if State is mirror then |
| 6: | if “command is turn right packet” then |
| 7: | replace the TCP.payload by “turn left” payload. |
| 8: | if “command is turn left packet” then |
| 9: | replace the TCP.payload by “turn right” payload. |
| 10: | if State is send_to_position then |
| 11: | replace the TCP.payload by “Go to X, Y” payload; the robot will go to specific location |
| 12: | if State is circulate then |
| 13: | replace the TCP.payload by “turn left” payload; the robot will turn around itself |
| 14: | if State is availability_attack then |
| 15: | drop the packet like if the robot is not present |
| 16: | if packet from robot to client then |
| 17: | if State is availability_attack then |
| 18: | drop the packet like if the robot is not present |
| 19: | if State is fake_position then |
| 20: | replace the TCP.payload with one with fake X,Y; |
| 21: | close; |
4.1.3. Analysis of Confidentiality Attacks
4.2. Qualitative Assessment Results
- Threat Event: Refers to the threat that is currently being analyzed.
- Threat Sources: Refer to the possible origins of the analyzed threat. According to [48], threat sources are classified into four categories: insiders, outsiders, trusted insiders, and privileged insiders. The threats considered in this paper require the attacker to be on the same network of the robot and the client. Hence, the attacker might be an insider or an outsider who hacked into the network. For example, in the case of a wireless network, an attacker can crack the WiFi password and get access to the network through many ways. The following three items are characteristics for the threat source.
- Capability: This is the first characteristic of the threat source. An attacker with high capability is one who is well resourced and has high level of expertise. Due to the increasing interest in cyber-security, the number of highly capable threat sources is increasing, especially in scientific and research environments. The reader should note that integrity and availability attacks considered in this work, require traffic analysis and hacking skills. In addition, those attacks (except TCP SYN flood availability attack) target the application level of the client/robot connection, which requires the attacker to be knowledgeable in this area as well. Hence, the capability level of the threat source is ranked as high for all considered attacks except TCP SYN flood which can be initiated with moderate capability.
- Intent: This is the second characteristic of the threat source. For the considered attacks, the adversary seeks to undermine critical functions of the system, which may result in physical damage by causing loss of integrity or availability.
- Targeting: This is the third characteristic of the threat source. For the considered attacks, the adversary targets a specific mission or function for the robot or the user (i.e., the target of the attack is not random).
- Relevance: This indicates how related the threat event is to the system under study. The relevance level could be one of the following: confirmed, expected, anticipated, predicted, possible, and not applicable. For example, if the threat event has already been observed in the system, then it is confirmed. Due to the lack of any evidence indicating that the considered threats happened on robot, we rank them as possible.
- Likelihood of attack initiation: Refers to the probability that the adversary will initiate the attack. All threat events are ranked as moderate.
- Severity of vulnerabilities: The analyzed integrity threat events leverage vulnerabilities in the data-link layer (through ARP spoofing) and the application layer in the communication link between the robot and the user. The same is true for the analyzed availability threat events that are based on MITM attack. On the other hand, the TCP SYN flood availability threat exploits vulnerabilities in the transport layer. According to the exposure, ease of exploitation, and the implemented security remediation against these vulnerabilities, we rank their severity as moderate.
- Pervasiveness of predisposing conditions: The main predisposing condition of all considered threat events is for the attacker to be connected to the same network of victims (e.g., connect physically, crack WiFi password or be an insider). Since this predisposing condition applies to a major part of the system under attack, we rank its pervasiveness as moderate.
- Likelihood initiated attack succeeds: Once the considered attacks are initiated, then it is almost certain that the integrity or the availability of the connection between the robot and the user will be lost. In this case, physical damage or human injury are somewhat likely.
- Overall likelihood: This is a combination of the likelihood of attack initiation and the likelihood initiated attack succeeds. If both items are high, then the overall likelihood is high. If one of them is moderate and the other one is high, then the overall likelihood is moderate.
- Level of impact: Severe or catastrophic effect on the target system means high impact. There is a very high possibility of physical damage/human injury for the considered attacks.
- Risk: This is the final risk assessment measure, which is the product of the overall likelihood and the level of impact. Moderate likelihood and high impact result in moderate risk [48].
4.3. Cyber-Physical Consequences
- Integrity attacks can result in:
- -
- Manipulating the behavior of the robot;
- -
- Delaying or preventing the robot from performing its assigned task, which can be very time sensitive (e.g., delivering urgent mail);
- -
- Hijacking the robot physically;
- -
- Navigating the robot to unintended or unauthorized place(s);
- -
- Denying remote access service to the robot, where the robot becomes unavailable;
- -
- Colliding with humans or equipments, which could result in injuries and damages;
- -
- Stealing or hijacking sensitive information on the robot; and
- -
- Limiting or reducing certain functions on the robot.
- Availability attacks can result in:
- -
- Denying remote access service to the robot;
- -
- Having the robot stolen;
- -
- Having the robot physically damaged; and
- -
- Colliding with humans or equipments, which could result in injuries and damages.
- Confidentiality attacks can result in:
- -
- Having sensitive information on the robot being hijacked and/or stolen.
4.4. Suggested Mitigation Techniques
5. Conclusions and Future Directions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Shladover, S.E.; Nowakowski, C. Regulatory challenges for road vehicle automation: Lessons from the california experience. Transp. Res. Part A Policy Pract. 2017, in press. [Google Scholar] [CrossRef]
- Priyadarshini, I. Cyber Security Risks in Robotics. In Detecting and Mitigating Robotic Cyber Security Risks; IGI Global: Hershey, PA, USA, 2017; pp. 333–348. [Google Scholar]
- Chu, J. Army Robotics in the Military. Available online: https://insights.sei.cmu.edu/sei_blog/2017/06/army-robotics-in-the-military.html (accessed on 3 May 2018).
- Kwon, H.; Ahmad Yousef, K.M.; Kak, A.C. Building 3D visual maps of interior space with a new hierarchical sensor fusion architecture. Robot. Auton. Syst. 2013, 61, 749–767. [Google Scholar] [CrossRef]
- Lera, F.J.R.; Llamas, C.F.; Guerrero, Á.M.; Olivera, V.M. Cybersecurity of Robotics and Autonomous Systems: Privacy and Safety. In Robotics-Legal, Ethical and Socioeconomic Impacts; InTech: London, UK, 2017. [Google Scholar]
- Matellán, V.; Bonaci, T.; Sabaliauskaite, G. Cyber-security in robotics and autonomous systems. Robot. Auton. Syst. 2018, 100, 41–42. [Google Scholar] [CrossRef]
- Chown, T.; Venaas, S. Rogue IPv6 Router Advertisement Problem Statement; RFC 6104; Internet Engineering Task Force (IETF): Fremont, CA, USA, 2011. [Google Scholar]
- Seo, D.; Lee, K. Comparing security vulnerability by operating system environment. Int. J. Serv. Technol. Manag. 2017, 23, 154–164. [Google Scholar] [CrossRef]
- Gorbenko, A.; Romanovsky, A.; Tarasyuk, O.; Biloborodov, O. Experience Report: Study of Vulnerabilities of Enterprise Operating Systems. In Proceedings of the 2017 IEEE 28th International Symposium on Software Reliability Engineering (ISSRE), Toulouse, France, 23–26 October 2017; pp. 205–215. [Google Scholar]
- Ahmad Yousef, K.; AlMajali, A.; Hasan, R.; Dweik, W.; Mohd, B. Security risk assessment of the PeopleBot mobile robot research platform. In Proceedings of the 2017 International Conference on Electrical and Computing Technologies and Applications (ICECTA), Ras Al Khaimah, UAE, 21–23 November 2017; pp. 1–5. [Google Scholar]
- Lera, F.J.R.; Balsa, J.; Casado, F.; Fernández, C.; Rico, F.M.; Matellán, V. Cybersecurity in Autonomous Systems: Evaluating the performance of hardening ROS. In Proceedings of the WAF2016, Málaga, Spain, 16–17 June 2016; p. 47. [Google Scholar]
- Balsa-Comerón, J.; Guerrero-Higueras, Á.M.; Rodríguez-Lera, F.J.; Fernández-Llamas, C.; Matellán-Olivera, V. Cybersecurity in Autonomous Systems: Hardening ROS Using Encrypted Communications and Semantic Rules. In ROBOT 2017: Third Iberian Robotics Conference; Springer: Berlin/Heidelberg, Germany, 2017; pp. 67–78. [Google Scholar]
- Abeykoon, I.; Feng, X. A Forensic Investigation of the Robot Operating System. In Proceedings of the 2017 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Exeter, UK, 21–23 June 2017; pp. 851–857. [Google Scholar]
- Breiling, B.; Dieber, B.; Schartner, P. Secure communication for the robot operating system. In Proceedings of the 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; pp. 1–6. [Google Scholar]
- Portugal, D.; Pereira, S.; Couceiro, M.S. The role of security in human-robot shared environments: A case study in ROS-based surveillance robots. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 981–986. [Google Scholar]
- Gerkey, B. Why ROS 2.0? Open Source Robotics Foundation, Inc.: San Francisco, CA, USA, 2017; Available online: https://design.ros2.org/articles/why_ros2.html (accessed on 3 May 2018).
- PeopleBot. Available online: http://www.mobilerobots.com/ResearchRobots/PeopleBot.aspx (accessed on 3 May 2018).
- MobileEyes. Available online: http://robots.mobilerobots.com/MobileEyes/README.txt (accessed on 3 May 2018).
- Bonaci, T.; Herron, J.; Yusuf, T.; Yan, J.; Kohno, T.; Chizeck, H.J. To make a robot secure: An experimental analysis of cyber security threats against teleoperated surgical robots. arXiv, 2015; arXiv:1504.04339. [Google Scholar]
- Martín, F.; Soriano, E.; Cañas, J.M. Quantitative analysis of security in distributed robotic frameworks. Robot. Auton. Syst. 2018, 100, 95–107. [Google Scholar] [CrossRef]
- Sabaliauskaite, G.; Ng, G.S.; Ruths, J.; Mathur, A. A comprehensive approach, and a case study, for conducting attack detection experiments in Cyber–Physical Systems. Robot. Auton. Syst. 2017, 98, 174–191. [Google Scholar] [CrossRef]
- SROS Project: Security Enhancements for ROS. Available online: http://wiki.ros.org/SROS (accessed on 3 May 2018).
- Dieber, B.; Breiling, B.; Taurer, S.; Kacianka, S.; Rass, S.; Schartner, P. Security for the Robot Operating System. Robot. Auton. Syst. 2017, 98, 192–203. [Google Scholar] [CrossRef]
- Guerrero-Higueras, Á.M.; DeCastro-García, N.; Matellán, V. Detection of Cyber-attacks to indoor real time localization systems for autonomous robots. Robot. Auton. Syst. 2018, 99, 75–83. [Google Scholar] [CrossRef]
- Shrivastava, S.; Adepu, S.; Mathur, A. Design and assessment of an Orthogonal Defense Mechanism for a water treatment facility. Robot. Auton. Syst. 2018, 101, 114–125. [Google Scholar] [CrossRef]
- Bezemskij, A.; Loukas, G.; Anthony, R.J.; Gan, D. Behaviour-based anomaly detection of cyber-physical attacks on a robotic vehicle. In Proceedings of the International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 14–16 December 2016; pp. 61–68. [Google Scholar]
- Vuong, T.P.; Loukas, G.; Gan, D.; Bezemskij, A. Decision tree-based detection of denial of service and command injection attacks on robotic vehicles. In Proceedings of the 2015 IEEE International Workshop on Information Forensics and Security (WIFS), Rome, Italy, 16–19 November 2015; pp. 1–6. [Google Scholar]
- Vuong, T. Cyber-Physical Intrusion Detection for Robotic Vehicles. Ph.D. Thesis, University of Greenwich, London, UK, 2017. [Google Scholar]
- Jones, A.; Straub, J. Using deep learning to detect network intrusions and malware in autonomous robots. In Proceedings of the Cyber Sensing 2017, Anaheim, CA, USA, 1 May 2017; p. 1018505. [Google Scholar]
- Javaid, A.Y.; Sun, W.; Devabhaktuni, V.K.; Alam, M. Cyber security threat analysis and modeling of an unmanned aerial vehicle system. In Proceedings of the 2012 IEEE Conference on Technologies for Homeland Security (HST), Waltham, MA, USA, 13–15 November 2012; pp. 585–590. [Google Scholar]
- Batson, L.T.; Wimmer, D.R., Jr. Unmanned Tactical Autonomous Control and Collaboration Threat and Vulnerability Assessment. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 2015. [Google Scholar]
- Quarta, D.; Pogliani, M.; Polino, M.; Maggi, F.; Zanchettin, A.M.; Zanero, S. An Experimental Security Analysis of an Industrial Robot Controller. In Proceedings of the 2017 IEEE Symposium on Security and Privacy (SP), San Jose, CA, USA, 22–26 May 2017; pp. 268–286. [Google Scholar]
- Bonaci, T.; Chizeck, H.J. On potential security threats against rescue robotic systems. In Proceedings of the 2012 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), College Station, TX, USA, 5–8 November 2012; pp. 1–2. [Google Scholar]
- Alemzadeh, H.; Chen, D.; Li, X.; Kesavadas, T.; Kalbarczyk, Z.T.; Iyer, R.K. Targeted attacks on teleoperated surgical robots: Dynamic model-based detection and mitigation. In Proceedings of the 2016 46th Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN), Toulouse, France, 28 June–1 July 2016; pp. 395–406. [Google Scholar]
- Chen, Y.; Kar, S.; Moura, J.M. Cyber physical attacks constrained by control objectives. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 1185–1190. [Google Scholar]
- Clark, G.W.; Doran, M.V.; Andel, T.R. Cybersecurity issues in robotics. In Proceedings of the 2017 IEEE Conference on Cognitive and Computational Aspects of Situation Management (CogSIMA), Savannah, GA, USA, 27–31 March 2017; pp. 1–5. [Google Scholar]
- Deng, Y.Q.; Shi, H.; Gong, J.; Li, J.Y. Integrity Protection of the Intelligent Robot’s Remote Information. Adv. Mater. Res. 2013, 706, 836–839. [Google Scholar] [CrossRef]
- Guiochet, J.; Martin-Guillerez, D.; Powell, D. Experience with model-based user-centered risk assessment for service robots. In Proceedings of the 2010 IEEE 12th International Symposium on High-Assurance Systems Engineering (HASE), San Jose, CA, USA, 3–4 November 2010; pp. 104–113. [Google Scholar]
- Khalid, A.; Kirisci, P.; Ghrairi, Z.; Pannek, J.; Thoben, K.D. Safety Requirements in Collaborative Human—Robot Cyber-Physical System. In Dynamics in Logistics; Springer: Berlin/Heidelberg, Germany, 2017; pp. 41–51. [Google Scholar]
- Khalid, A.; Kirisci, P.; Khan, Z.H.; Ghrairi, Z.; Thoben, K.D.; Pannek, J. Security framework for industrial collaborative robotic cyber-physical systems. Comput. Ind. 2018, 97, 132–145. [Google Scholar] [CrossRef]
- Kriaa, S.; Pietre-Cambacedes, L.; Bouissou, M.; Halgand, Y. A survey of approaches combining safety and security for industrial control systems. Reliab. Eng. Syst. Saf. 2015, 139, 156–178. [Google Scholar] [CrossRef]
- McLean, I.; Szymanski, B.; Bivens, A. Methodology of risk assessment in mobile agent system design. In Proceedings of the IEEE Systems, Man and Cybernetics Society Information Assurance Workshop, West Point, NY, USA, 18–20 June 2003; pp. 35–42. [Google Scholar]
- Vuong, T.; Filippoupolitis, A.; Loukas, G.; Gan, D. Physical indicators of cyber attacks against a rescue robot. In Proceedings of the 2014 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), Budapest, Hungary, 24–28 March 2014; pp. 338–343. [Google Scholar]
- Wardzinski, A. Dynamic risk assessment in autonomous vehicles motion planning. In Proceedings of the 2008 1st International Conference on Information Technology, Gdansk, Poland, 18–21 May 2008; pp. 1–4. [Google Scholar]
- Chowdhury, A.; Karmakar, G.; Kamruzzaman, J. Survey of Recent Cyber Security Attacks on Robotic Systems and Their Mitigation Approaches. In Detecting and Mitigating Robotic Cyber Security Risks; IGI Global: Hershey, PA, USA, 2017; pp. 284–299. [Google Scholar]
- Matellan, V.; Rodriguez-Lera, F.J.; Balsa, J. Cybersecurity in Robotic Systems. ERCIM News. July 2016, pp. 44–45. Available online: https://ercim-news.ercim.eu/en106/special/cybersecurity-in-robotic-systems (accessed on 3 May 2018).
- Code for the RAT Tool. Available online: https://github.com/salahghalyon/RAT_tool (accessed on 3 May 2018).
- Guide for Conducting Risk Assessments. Available online: https://csrc.nist.gov/publications/drafts/800-30-rev1/SP800-30-Rev1-ipd.pdf (accessed on 3 May 2018).
- Software and Documentation for MobileRobots Research and Development Platforms. Available online: http://robots.mobilerobots.com/wiki/Software_Updates (accessed on 3 May 2018).
- ArnlServer. Available online: http://robots.mobilerobots.com/wiki/ARNL,_SONARNL_and_MOGS (accessed on 3 May 2018).
- ArNetworking or ARNL Server Login and Password. Available online: http://robots.mobilerobots.com/wiki/ArNetworking_or_ARNL_Server_Login_and_Password (accessed on 3 May 2018).
- Meng, N.; Nagy, S.; Yao, D.; Zhuang, W.; Argoty, G.A. Secure Coding Practices in Java: Challenges and Vulnerabilities. arXiv, 2017; arXiv:1709.09970. [Google Scholar]
- Choi, Y.B.; Hunter, N.D. Design, Release, Update, Repeat: The Basic Process of a Security Protocolś Evolution. Int. J. Adv. Comput. Sci. Appl. 2017, 8, 355–360. [Google Scholar]
- MobileSim. Available online: http://robots.mobilerobots.com/MobileSim/download/current/README.html (accessed on 3 May 2018).
- Vaughan, R. Massively multi-robot simulation in stage. Swarm Intell. 2008, 2, 189–208. [Google Scholar] [CrossRef]
- Burg, A.; Chattopadhyay, A.; Lam, K.Y. Wireless Communication and Security Issues for Cyber–Physical Systems and the Internet-of-Things. Proc. IEEE 2018, 106, 38–60. [Google Scholar] [CrossRef]
- Scapy. Available online: http://www.secdev.org/projects/scapy/ (accessed on 3 May 2018).
- Mohd, B.J.; Hayajneh, T.; Vasilakos, A.V. A survey on lightweight block ciphers for low-resource devices: Comparative study and open issues. J. Netw. Comput. Appl. 2015, 58, 73–93. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Threat Event | Threat Sources | Threat Source Characteristics | Relevance | Likelihood of Attack Initiation | Severity of Vulnerabilities | Pervasiveness of Predisposing Conditions | Likelihood Initiated Attack Succeeds | Overall Likelihood | Level of Impact | Risk | ||
| Capability | Intent | Targeting | ||||||||||
| Manipulate user commands | ||||||||||||
| (Cyber-physical Attack). | Insider or outsider | High | High | High | Possible | Moderate | Moderate | Moderate | High (loss of integrity) | Moderate | High | Moderate |
| Manipulate data and feedback from the robot (Cyber-physical Attack) | Insider or outsider | High | High | High | Possible | Moderate | Moderate | Moderate | High (loss of integrity) | Moderate | High | Moderate |
| TCP SYN flood on port 7272 | Insider or outsider | Moderate | High | High | Possible | Moderate | Moderate | Moderate | High (loss of availability) | Moderate | High | Moderate |
| Corrupt configuration files on robot or client | Insider or outsider | High | High | High | Possible | Moderate | Moderate | Moderate | High (loss of availability) | Moderate | High | Moderate |
| Drop certain commands so that certain functions are not available | Insider or outsider | High | High | High | Possible | Moderate | Moderate | Moderate | High (loss of availability) | Moderate | High | Moderate |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad Yousef, K.M.; AlMajali, A.; Ghalyon, S.A.; Dweik, W.; Mohd, B.J. Analyzing Cyber-Physical Threats on Robotic Platforms. Sensors 2018, 18, 1643. https://doi.org/10.3390/s18051643
Ahmad Yousef KM, AlMajali A, Ghalyon SA, Dweik W, Mohd BJ. Analyzing Cyber-Physical Threats on Robotic Platforms. Sensors. 2018; 18(5):1643. https://doi.org/10.3390/s18051643
Chicago/Turabian StyleAhmad Yousef, Khalil M., Anas AlMajali, Salah Abu Ghalyon, Waleed Dweik, and Bassam J. Mohd. 2018. "Analyzing Cyber-Physical Threats on Robotic Platforms" Sensors 18, no. 5: 1643. https://doi.org/10.3390/s18051643
APA StyleAhmad Yousef, K. M., AlMajali, A., Ghalyon, S. A., Dweik, W., & Mohd, B. J. (2018). Analyzing Cyber-Physical Threats on Robotic Platforms. Sensors, 18(5), 1643. https://doi.org/10.3390/s18051643