Design and Fabrication of Full Wheatstone-Bridge-Based Angular GMR Sensors

Abstract
:1. Introduction
2. Materials and Processes
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Baibich, M.N.; Broto, J.M.; Fert, A.; Vandau, F.N.; Petroff, F.; Eitenne, P.; Creuzet, G.; Friederich, A.; Chazelas, J. Giant magnetoresistance of (001) Fe/(001) Cr magnetic super lattices. Phys. Rev. Lett. 1988, 61, 2472–2475. [Google Scholar] [CrossRef] [PubMed]
- Binasch, G.; Grunberg, P.; Saurenbach, F.; Zinn, W. Enhanced magnetoresistance in layered magnetic structures with antiferromagnetic interlayer exchange. Phys. Rev. B 1989, 39, 4828–4830. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, X.; Li, M.; Gao, Y.; Hu, Z.; Nan, T.; Liang, X.; Chen, H.; Yang, J.; Cash, S.; et al. Highly sensitive flexible Magnetic sensor based on anisotropic magnetoresistance effect. Adv. Mater. 2016, 28, 9370–9377. [Google Scholar] [CrossRef] [PubMed]
- Cubells-Beltran, M.D.; Reig, C.; Madrenas, J.; De Marcellis, A.; Santos, S.; Freitas, P.P. Integration of GMR sensors with different technologies. Sensors 2016, 16, 939. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Y.T.; Kolhatkar, A.G.; Zenasni, O.; Xu, S.J.; Lee, T.R. Biosensing using magnetic particle detection techniques. Sensors 2017, 17, 2300. [Google Scholar] [CrossRef] [PubMed]
- Weiss, R.; Mattheis, R.; Reiss, G. Advanced giant magnetoresistance technology for measurement applications. Meas. Sci. Technol. 2013, 24, 1–18. [Google Scholar] [CrossRef]
- Lee, J.R.; Haddon, D.J.; Gupta, N.; Price, J.V.; Credo, G.M.; Diep, V.K.; Kim, K.; Hall, D.A.; Baecher, E.C.; Petri, M.; et al. High resolution analysis of antibodies to post-translational modifications using peptide nanosensor microarrays. ACS Nano 2016, 10, 10652–10660. [Google Scholar] [CrossRef] [PubMed]
- Krishna, V.D.; Wu, K.; Perez, A.M.; Wang, J.P. Giant Magnetoresistance-based Biosensor for Detection of Influenza a Virus. Front. Microbiol. 2016, 7, 400. [Google Scholar] [CrossRef] [PubMed]
- Dieny, B.; Speriosu, V.S.; Parkin, S.S.P.; Gurney, B.A.; Wilhoit, D.R.; Mauri, D. Giant magnetoresistance in soft ferromagnetic multilayers. Phys. Rev. B 1991, 43, 1297–1300. [Google Scholar] [CrossRef]
- Coelho, P.; Leitao, D.C.; Antunes, J.; Cardoso, S.; Freitas, P.P. Spin valve devices with synthetic ferrimagnet free layer displaying enhanced sensitivity for nanometric sensor. IEEE Trans. Magn. 2014, 50, 4401604. [Google Scholar] [CrossRef]
- Chan, P.H.; Li, X.; Pong, P.W.T. Spin valves with Conetic based synthetic ferrimagnet free layer. Vacuum 2017, 140, 111–115. [Google Scholar] [CrossRef]
- Cubells-Beltran, M.D.; Reig, C.; Munoz, D.R.; Freitas, S.I.P.; Freitas, P.J.P. Full Wheatstone bridge spin-valve based sensors for IC currents monitoring. IEEE Sens. J. 2009, 9, 1756–1762. [Google Scholar] [CrossRef]
- Freitas, P.P. Spintronic sensors. Proc. IEEE 2016, 104, 1894–1918. [Google Scholar] [CrossRef]
- Reig, C.; Ramirez, D.; Silva, F.; Bernardo, J.; Freitas, P. Design, fabrication and analysis of a pin-valved based current sensor. Sens. Actuators A Phys. 2004, 115, 259–266. [Google Scholar] [CrossRef]
- Ueberschar, O.; Almeida, M.J.; Matthes, P.; Muller, M.; Ecke, R.; Ruckriem, R.; Schuster, J.; Exner, H.; Schulz, S.E. Optimized monolithic 2-D spin-valve sensor for high-sensitivity compass applications. IEEE Trans. Magn. 2015, 51, 40002404. [Google Scholar] [CrossRef]
- Berthold, I.; Muller, M.; Klotzer, S.; Ebert, R.; Thomas, S.; Matthes, P.; Albrecht, M.; Exner, H. Investigation of selective realignment of the preferred magnetic direction in spin valve layer stacks using laser radiation. Appl. Surf. Sci. 2014, 302, 159–162. [Google Scholar] [CrossRef]
- Kim, K.Y.; Jang, S.H.; Shin, K.H.; Kim, H.J.; Kang, T. Interlayer coupling field in spin valves with CoFe/Ru/CoFe/FeMn synthetic antiferromangets. J. Appl. Phys. 2001, 89, 7612–7616. [Google Scholar] [CrossRef]
- Miheev, M.N.; Naumova, L.; Chernshova, T.; Proglyado, V.; Kamensky, I.; Ustinov, V. Spin-Flop in synthetic antiferromagnet and anhysteretic Magnetic Reversal in FeMn-Based Spin Valves. IEEE Trans. Magn. 2016, 52, 2301104. [Google Scholar]
- Tong, H.C.; Qian, C.; Miloslavsky, L.; Funada, S.; Shi, X.; Liu, F.; Dey, S. The spin flop of synthetic antiferromagnetic films. J. Appl. Phys. 2000, 87, 5055–5057. [Google Scholar] [CrossRef]
- Redon, O.; Albuquer, G.B.; Rodrigues, L.M.; Silva, F.I.; Freitas, P.P. Annealing effect on spin-valve sensor transfer curves. IEEE Trans. Magn. 1998, 34, 562–567. [Google Scholar] [CrossRef]
- Qian, Z.; Bai, R.; Yang, C.; Li, Q.; Sun, Y.; Huo, D.; Li, L.; Zhan, H.; Li, Y.; Zhu, J. Effective anisotropy field in the free layer of patterned spin-valve resistor. J. Appl. Phys. 2011, 109, 103904. [Google Scholar] [CrossRef]
- Anderson, G.W.; Huai, Y.; Pakala, M. Spin valve thermal stability: The effect of different antiferromagnets. J. Appl. Phys. 2000, 87, 5275–5278. [Google Scholar] [CrossRef]
- Kim, M.J.; Kim, H.J.; Kim, K.Y.; Jang, S.H.; Kang, T. The annealing effect on GMR properties of PtMn-based spin valve. J. Magn. Magn. Mater. 2002, 239, 195–197. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
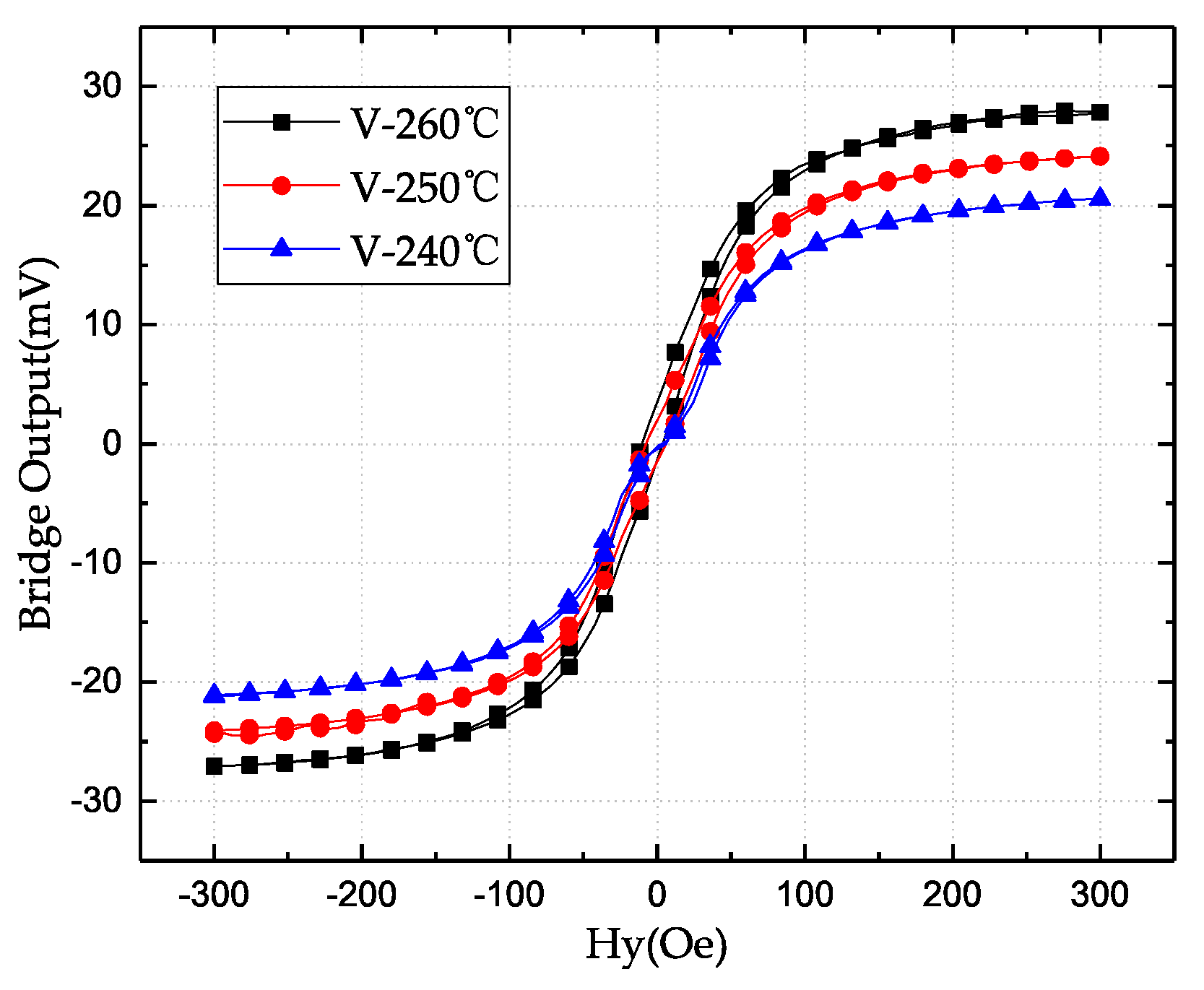
| Annealing Temprature | Sensitivity (mV/V/Oe) | Angles of Pinned Layer Magnetization in Arm1 | MR Ratio of individual Element |
|---|---|---|---|
| 260 °C | 0.112 | 71.7° | 6.12% |
| 250 °C | 0.093 | 71.6° | 5.25% |
| 240 °C | 0.074 | 80.5° | 5.36% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, S.; Cao, Z.; Guo, Z.; Zheng, Z.; Cao, A.; Qi, Y.; Leng, Q.; Zhao, W. Design and Fabrication of Full Wheatstone-Bridge-Based Angular GMR Sensors. Sensors 2018, 18, 1832. https://doi.org/10.3390/s18061832
Yan S, Cao Z, Guo Z, Zheng Z, Cao A, Qi Y, Leng Q, Zhao W. Design and Fabrication of Full Wheatstone-Bridge-Based Angular GMR Sensors. Sensors. 2018; 18(6):1832. https://doi.org/10.3390/s18061832
Chicago/Turabian StyleYan, Shaohua, Zhiqiang Cao, Zongxia Guo, Zhenyi Zheng, Anni Cao, Yue Qi, Qunwen Leng, and Weisheng Zhao. 2018. "Design and Fabrication of Full Wheatstone-Bridge-Based Angular GMR Sensors" Sensors 18, no. 6: 1832. https://doi.org/10.3390/s18061832
APA StyleYan, S., Cao, Z., Guo, Z., Zheng, Z., Cao, A., Qi, Y., Leng, Q., & Zhao, W. (2018). Design and Fabrication of Full Wheatstone-Bridge-Based Angular GMR Sensors. Sensors, 18(6), 1832. https://doi.org/10.3390/s18061832