An Improved Heuristic Drift Elimination Method for Indoor Pedestrian Positioning


Abstract
:1. Introduction
2. Pedestrian Dead Reckoning (PDR) Implementation with Kalman Filter
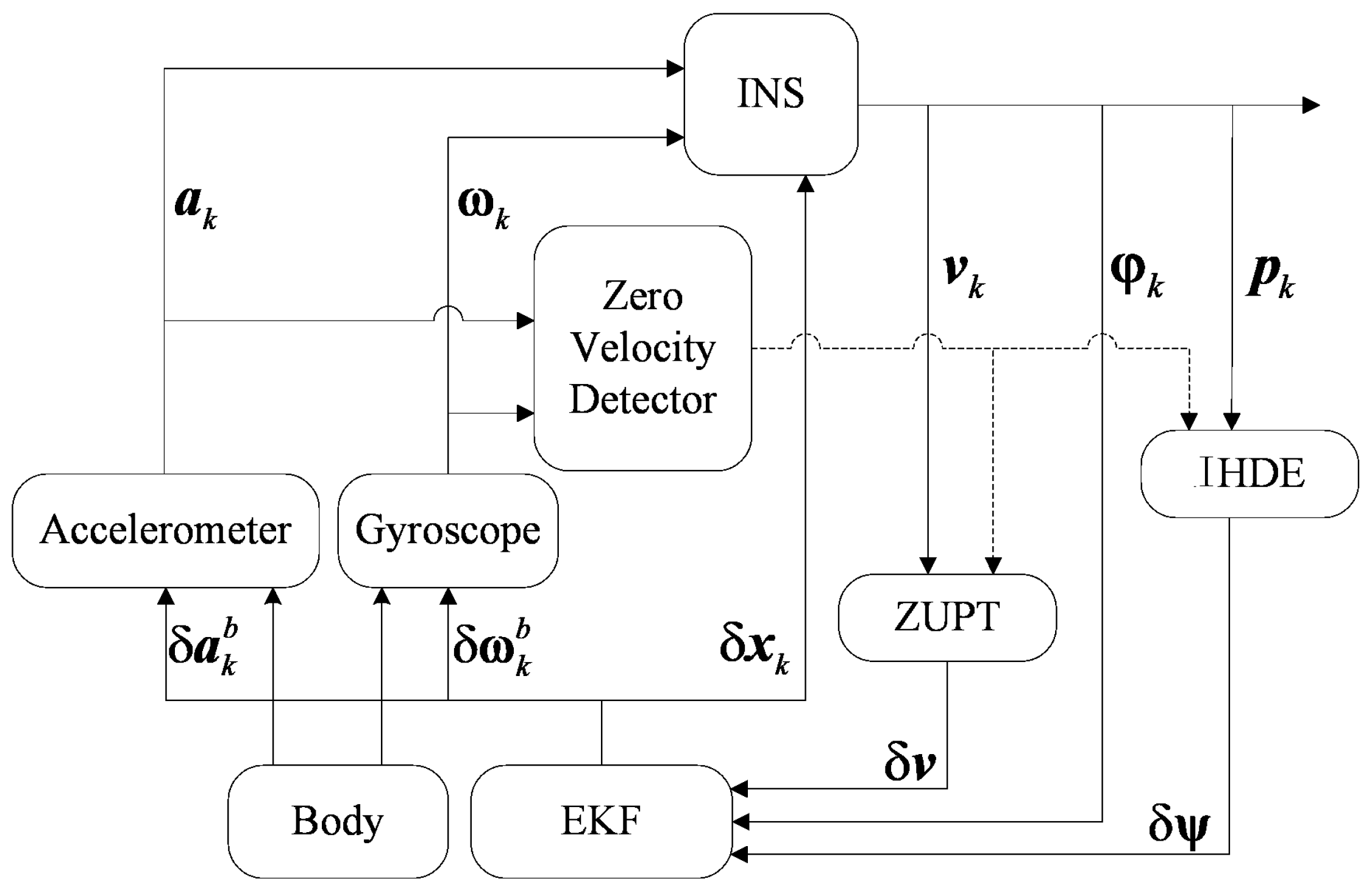
2.1. Micro-Inertial-Navigation System
- Data Preprocessing: Due to the drift characteristics of inertial sensors, we compensate the raw data and by the estimated errors and before calculating them.
- Attitude Update: We update the quaternion to get the pedestrian’s attitude information. The quaternion updating method is as follows:represents the quaternion, and is a 4 by 4 unit matrix. Since the sampling period is very short,() indicates the angle increment of gyroscope, and is the modulus of angle increments. The attitude angles can then be calculated by the quaternion as:, and are the roll, pitch, and yaw angle, respectively.
- Position and Velocity Update: We first transform the acceleration in the sensor body frame to the navigation frame with the attitude matrix, and then remove the gravitational acceleration:represents the free acceleration, and the gravitational acceleration with g’s value chosen as 9.80665 m/s2. is the attitude matrix, where t refers to the navigation frame (defined to be North-East-Down on the ground) and b is the body frame. The pedestrian’s position and velocity are updated by the integral of .
- Motion Information Correction: If a zero speed moment is detected, because theoretically the pedestrian’s velocity should be zero, we take the difference between zero and , that is,as the measurements, and estimate the error state by EKF to correct the motion information. The position and velocity can be directly corrected by and . The attitude correction is equivalent to the correction of attitude matrix:where is the skew symmetric matrix for . According to the conversion relationship between the attitude matrix and quaternion, the quaternion can then be corrected.
2.2. Extended Kalman Filter
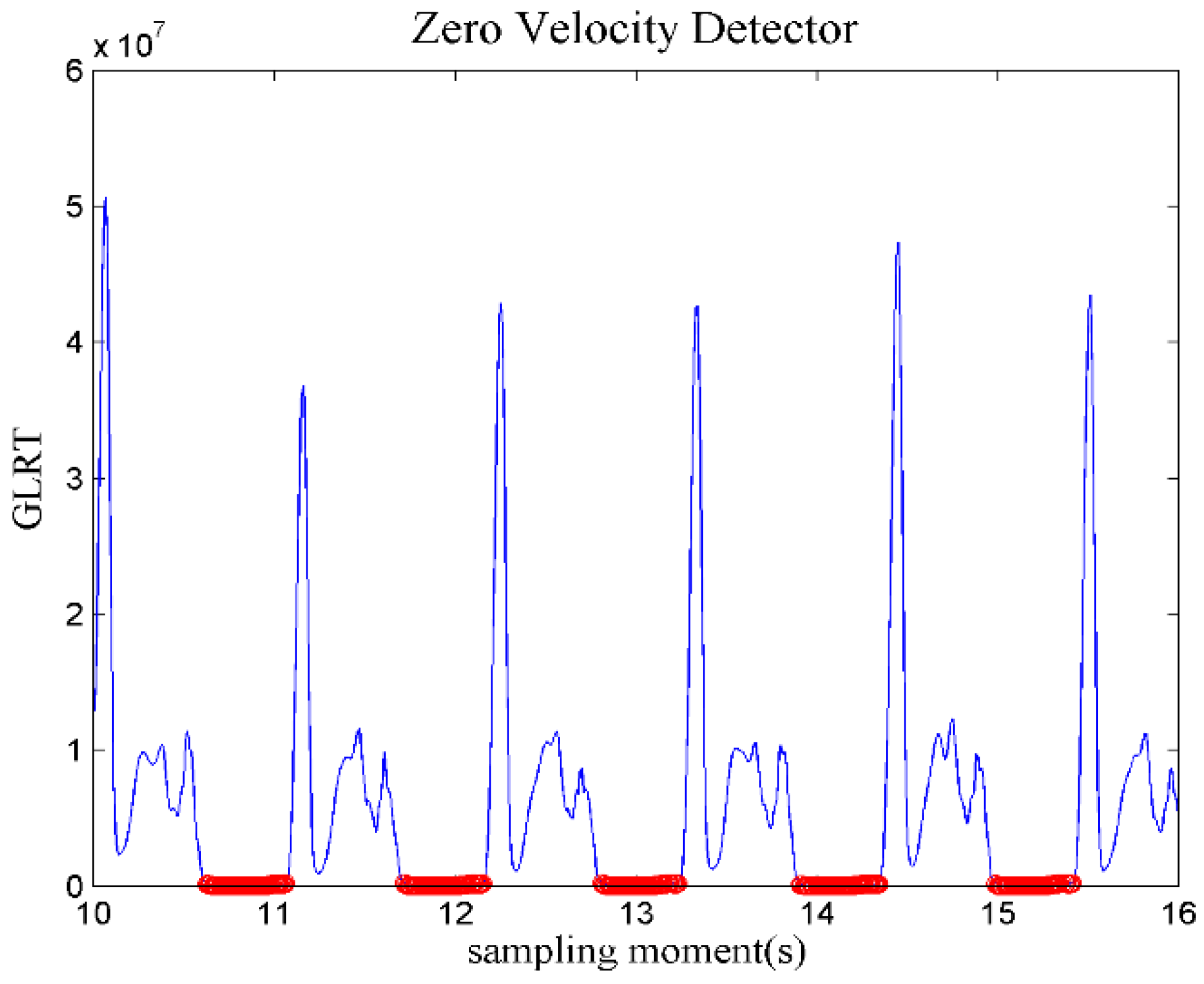
2.3. Zero Velocity Detector
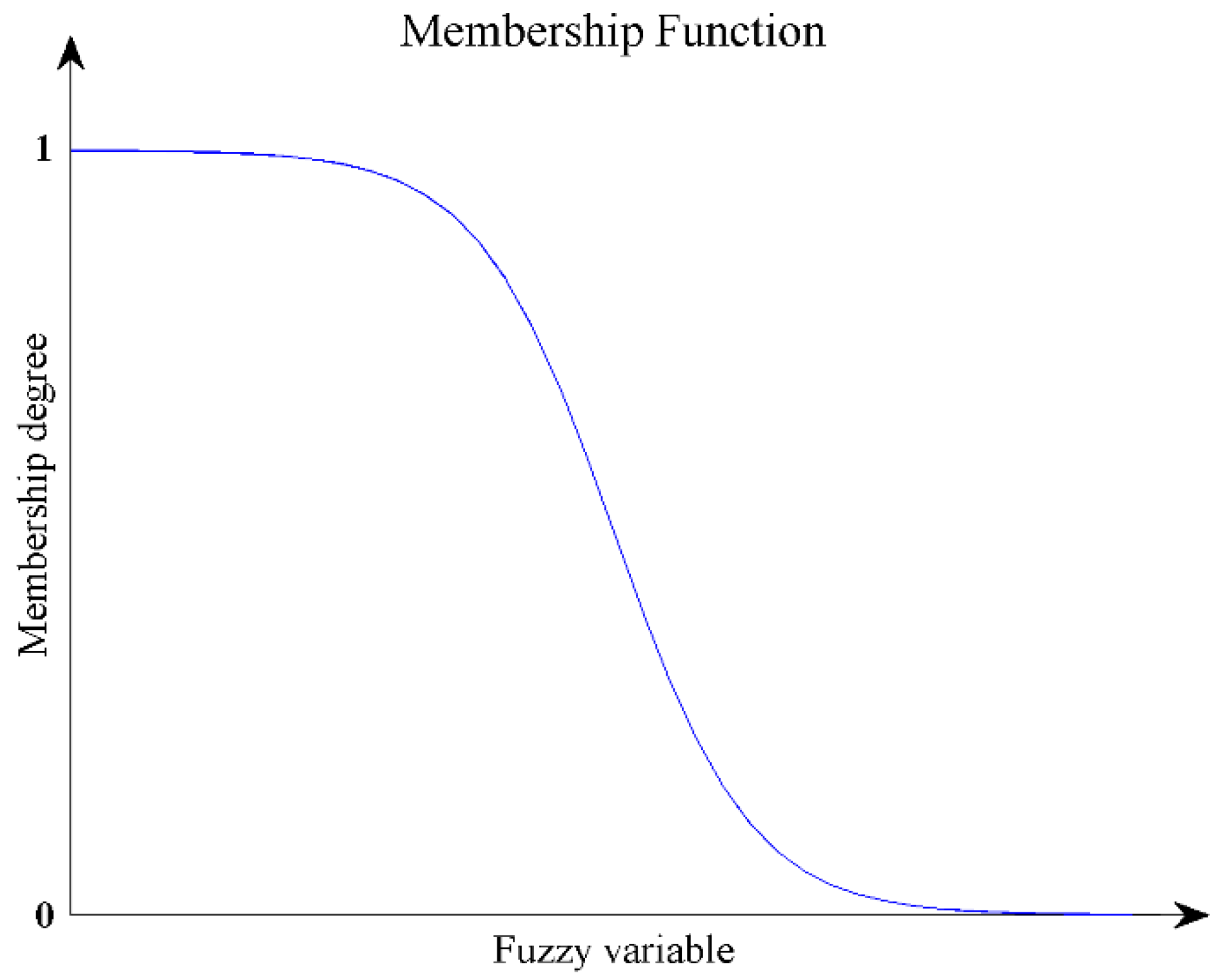
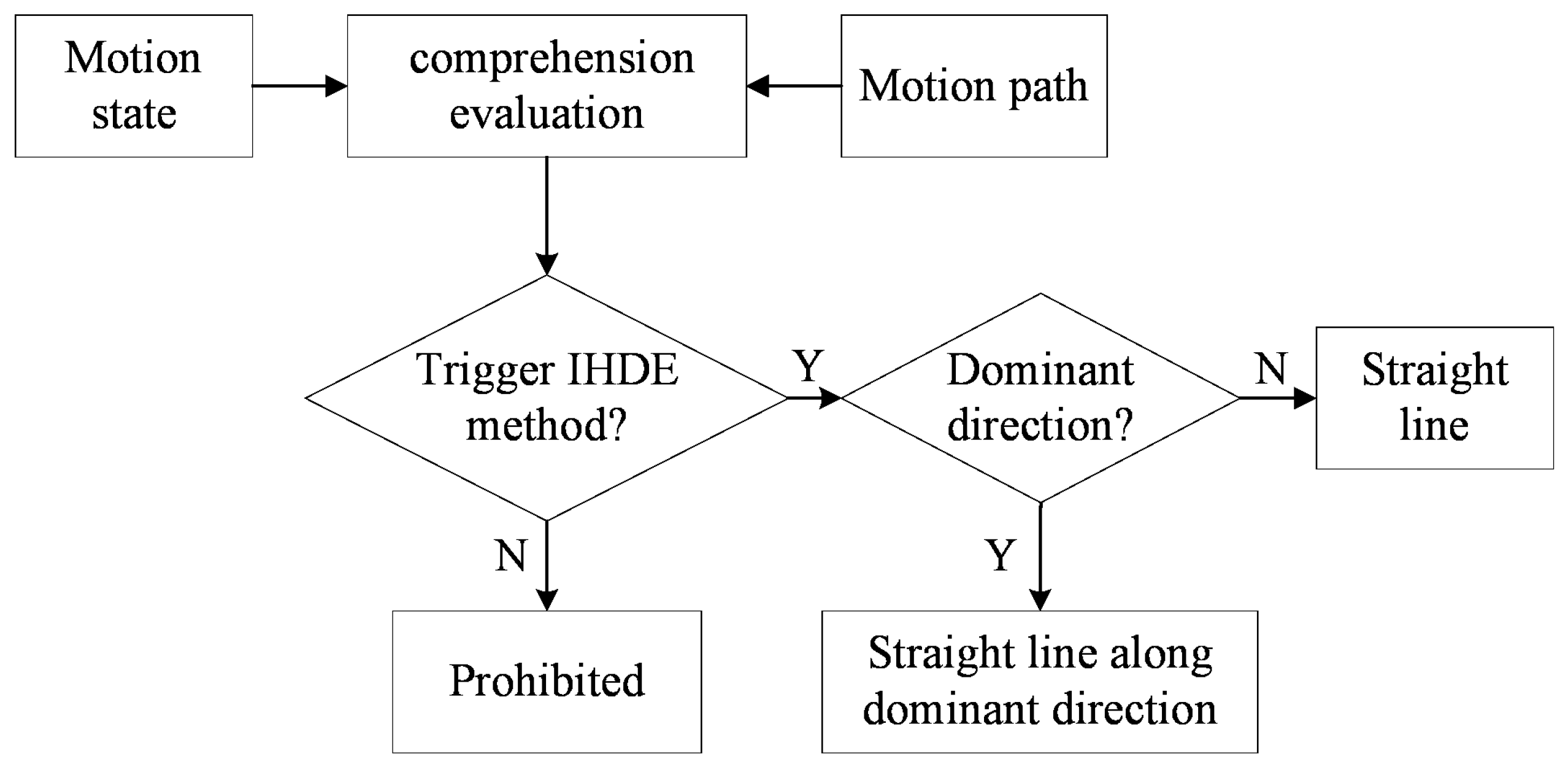
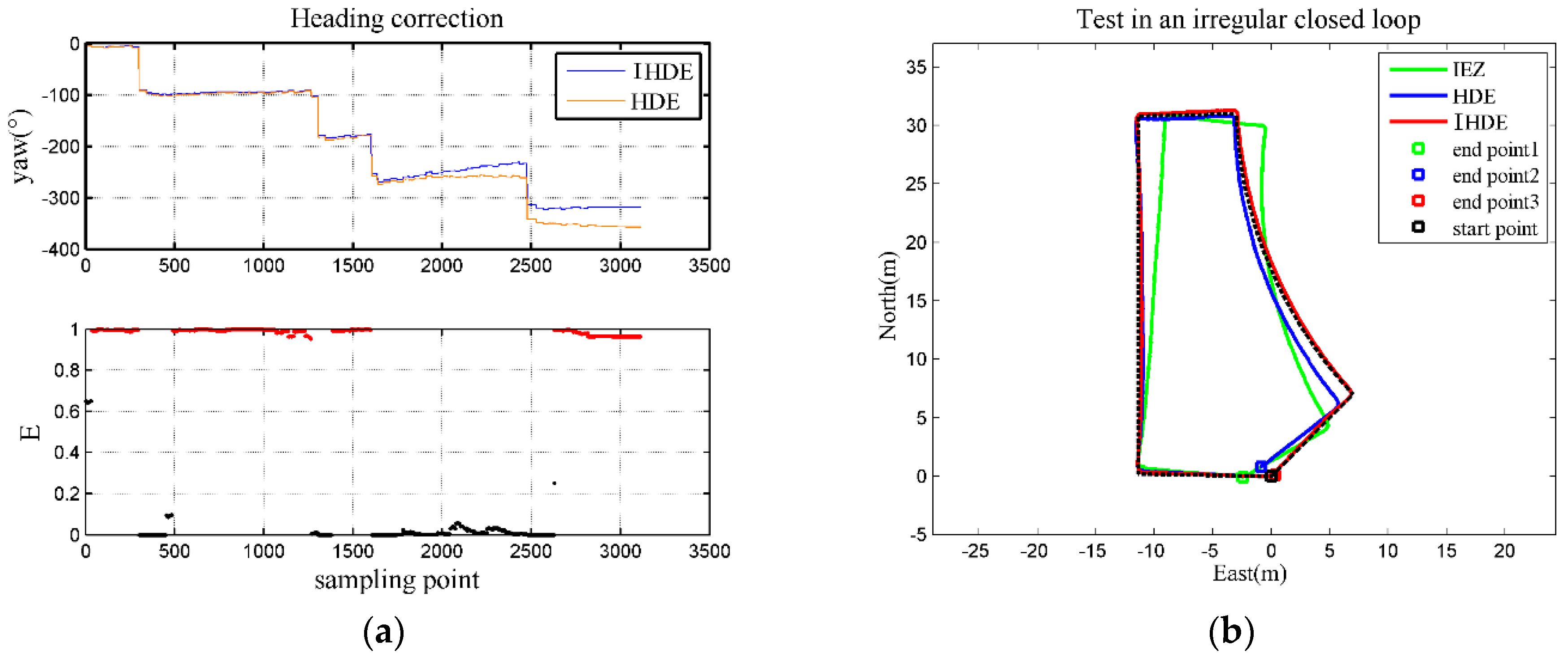
2.4. The Improved HDE Method
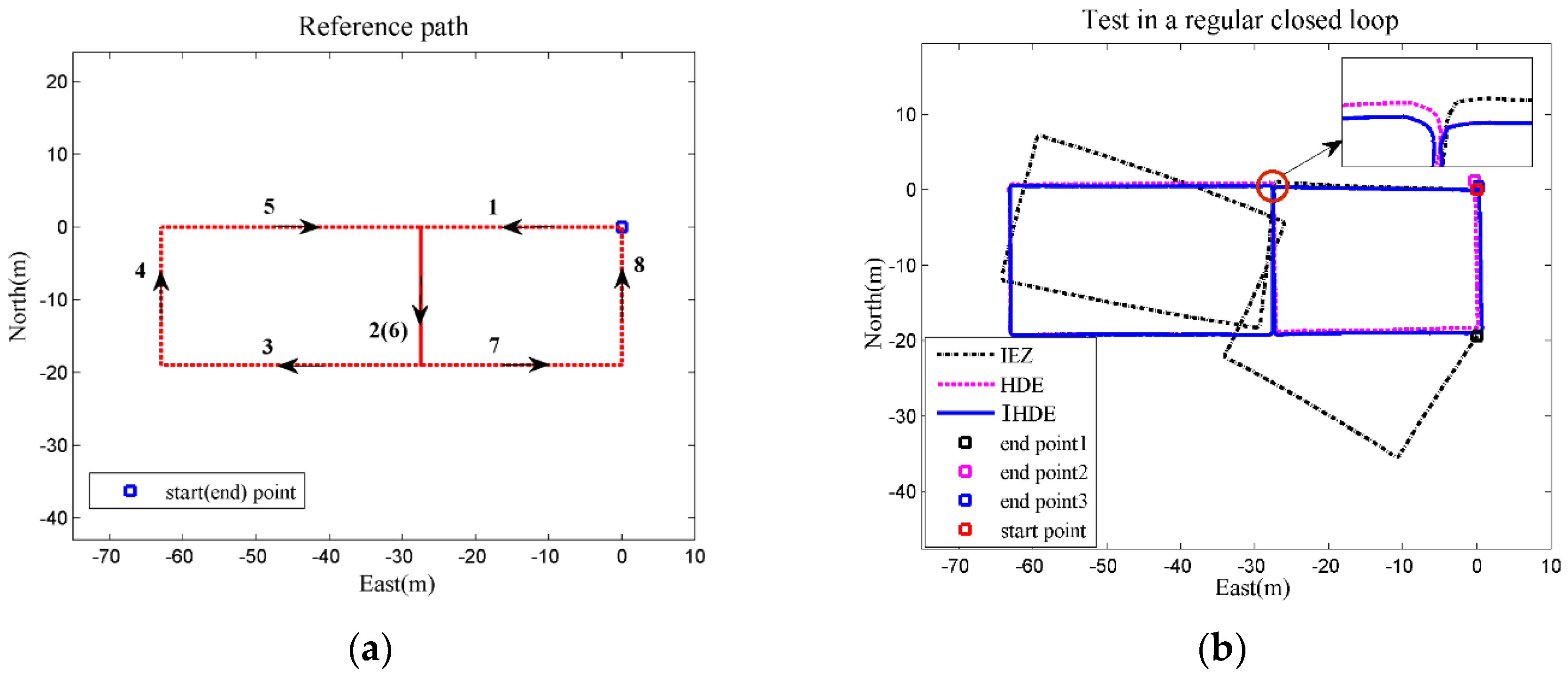
3. Tests
3.1. IMU Description
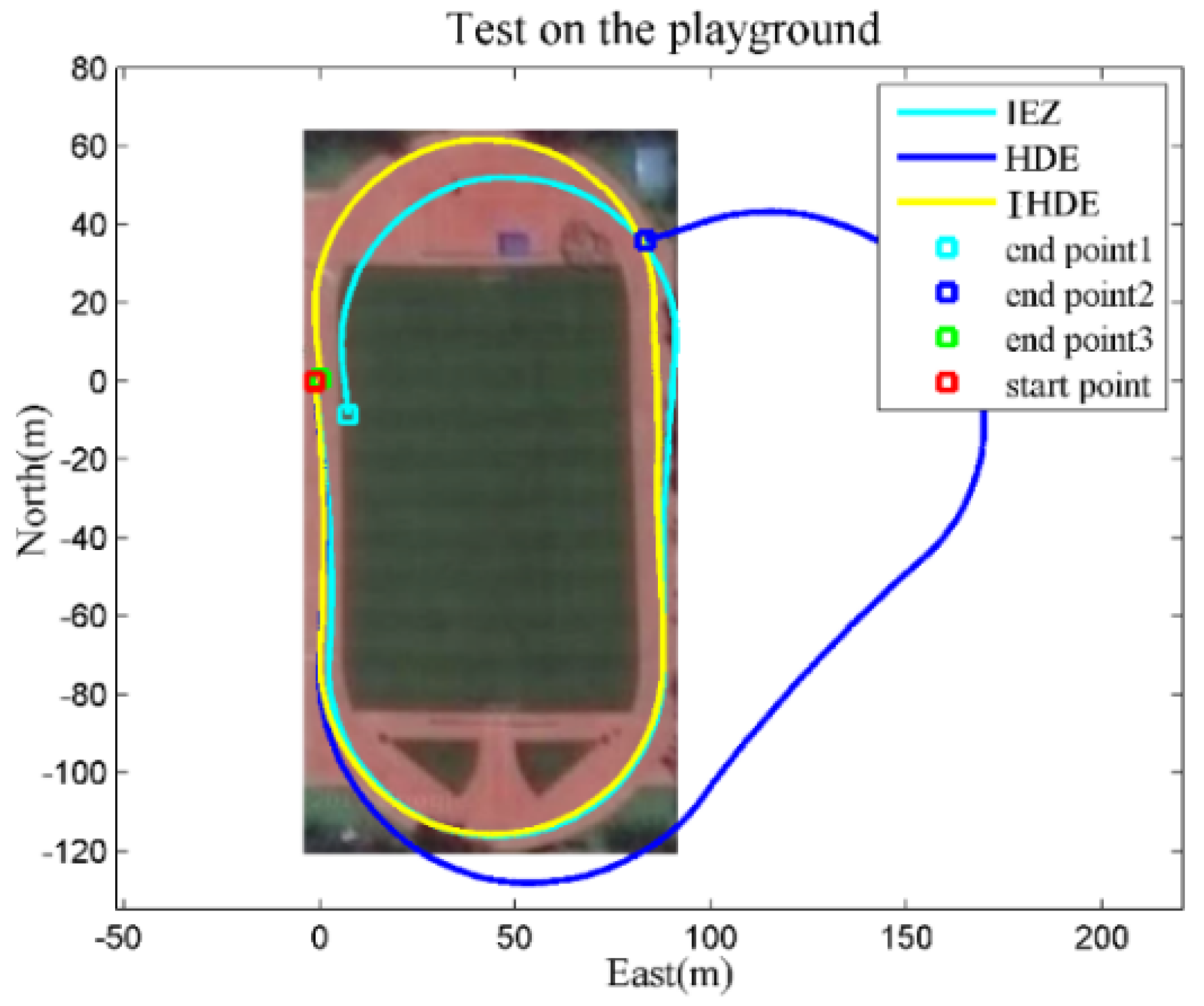
3.2. Results and Analyses
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Godha, S.; Lachapelle, G. Foot mounted inertial system for pedestrian navigation. Meas. Sci. Technol. 2008, 19, 075202. [Google Scholar] [CrossRef]
- Fischer, C.; Talkad Sukumar, P.; Hazas, M. Tutorial: Implementation of a pedestrian tracker using foot-mounted inertial sensors. IEEE Pervasive Comput. 2013, 12, 17–27. [Google Scholar] [CrossRef]
- Yang, H.; Liu, Y.; Liu, C.; Song, J. A personal navigation system based on MEMSIMU/GNSS/magnetometer/barometric altimeter. In Proceedings of the 2015 CSIT 7th Annual Conference on Inertial Technology, Wuhan, China, 20–21 October 2015; pp. 63–69. [Google Scholar]
- Bird, J.; Arden, D. Indoor navigation with foot-mounted strapdown inertial navigation and magnetic sensors. IEEE Wirel. Commun. 2011, 18, 28–35. [Google Scholar] [CrossRef]
- Haris, A.M.; Valérie, R.; Gérard, L. Use of earth’s magnetic field for mitigating gyroscope errors regardless of magnetic perturbation. Sensors 2011, 11, 11390–11414. [Google Scholar]
- Borenstein, J.; Ojeda, L.; Kwanmuang, S. Heuristic reduction of gyro drift in imu-based personnel tracking systems. J. Navig. 2009, 62, 41–58. [Google Scholar] [CrossRef]
- Widyawan; Pirkl, G.; Munaretto, D.; Fischer, C.; An, C.; Lukowicz, P.; Klepal, M.; Timm-Giel, A.; Widmer, J.; Pesch, D.; et al. Virtual lifeline: Multimodal sensor data fusion for robust navigation in unknown environments. Pervasive Mob. Comput. 2012, 8, 388–401. [Google Scholar] [CrossRef]
- Pinchin, J.; Hide, C.; Moore, T. A particle filter approach to indoor navigation using a foot mounted inertial navigation system and heuristic heading information. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 1–10. [Google Scholar]
- Borenstein, J.; Ojeda, L. Heuristic drift elimination for personnel tracking systems. J. Navig. 2010, 63, 591–606. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F.; Zampella, F.; Prieto, J.C. Improved Heuristic Drift Elimination (iHDE) for pedestrian navigation in complex buildings. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimarães, Portugal, 21–23 September 2011; pp. 1–8. [Google Scholar]
- Cho, S.Y.; Park, C.G. MEMS based pedestrian navigation system. J. Navig. 2006, 59, 135–153. [Google Scholar] [CrossRef]
- Bistrovs, V.; Kluga, A. Adaptive extended Kalman filter for aided inertial navigation system. Elektron. Elektrotech. 2012, 122, 37–40. [Google Scholar] [CrossRef]
- Ju, H.; Lee, M.S.; Park, S.Y.; Song, J.W.; Park, C.G. A pedestrian dead-reckoning system that considers the heel-strike and toe-off phases when using a foot-mounted IMU. Meas. Sci. Technol. 2015, 27, 015702. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P.; Nilsson, J.O.; Rantakokko, J. Zero-velocity detection—An algorithm evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef] [PubMed]
- Khairi, A.; Chris, H.; Terry, M.; Chris, H. Aiding low cost inertial navigation with building heading for pedestrian navigation. J. Navig. 2011, 64, 219–233. [Google Scholar]
- Ju, H.J.; Min, S.L.; Chan, G.P.; Lee, S.; Park, S. Advanced Heuristic Drift Elimination for indoor pedestrian navigation. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 729–732. [Google Scholar]
- Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU. In Proceedings of the 2010 7th Workshop on Positioning Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp. 135–143. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometers | Gyroscopes | |
|---|---|---|
| Full Scale (FS) | ±15 g | ±1000°/s |
| Non-linearity | 0.03% FS | 0.01% FS |
| Bias stability | 40 μg | 10°/h |
| Bandwidth | 375 Hz | 415 Hz |
| Method | Positioning Errors | ||
|---|---|---|---|
| Test 1 | Test 2 | Test 3 | |
| IEZ | 8.7~9.6% | 2.3~2.8% | 2.6~3.2% |
| HDE | 0.3~0.6% | 1.3~1.7% | >20% |
| IHDE | 0.2~0.4% | 0.4~0.7% | 0.3~0.5% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Z.; Cao, Y.; Wang, P.; Wang, B. An Improved Heuristic Drift Elimination Method for Indoor Pedestrian Positioning. Sensors 2018, 18, 1874. https://doi.org/10.3390/s18061874
Deng Z, Cao Y, Wang P, Wang B. An Improved Heuristic Drift Elimination Method for Indoor Pedestrian Positioning. Sensors. 2018; 18(6):1874. https://doi.org/10.3390/s18061874
Chicago/Turabian StyleDeng, Zhihong, Yun Cao, Pengyu Wang, and Bo Wang. 2018. "An Improved Heuristic Drift Elimination Method for Indoor Pedestrian Positioning" Sensors 18, no. 6: 1874. https://doi.org/10.3390/s18061874
APA StyleDeng, Z., Cao, Y., Wang, P., & Wang, B. (2018). An Improved Heuristic Drift Elimination Method for Indoor Pedestrian Positioning. Sensors, 18(6), 1874. https://doi.org/10.3390/s18061874