Modeling and Identification for Vector Propulsion of an Unmanned Surface Vehicle: Three Degrees of Freedom Model and Response Model



Abstract
:1. Introduction
2. Field Experiment of Data Acquisition
2.1. Lanxin USV
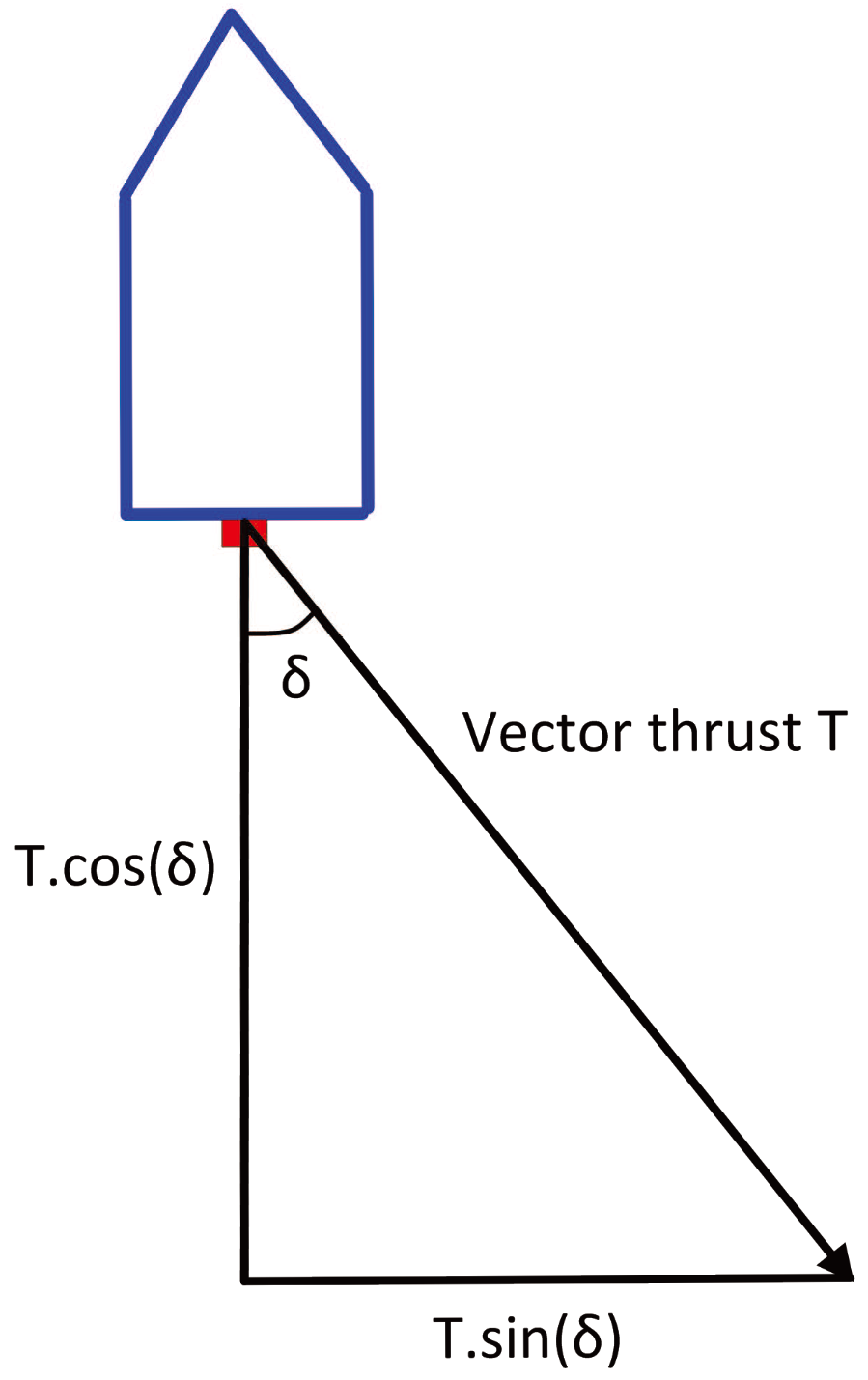
2.2. Vector Propulsion System
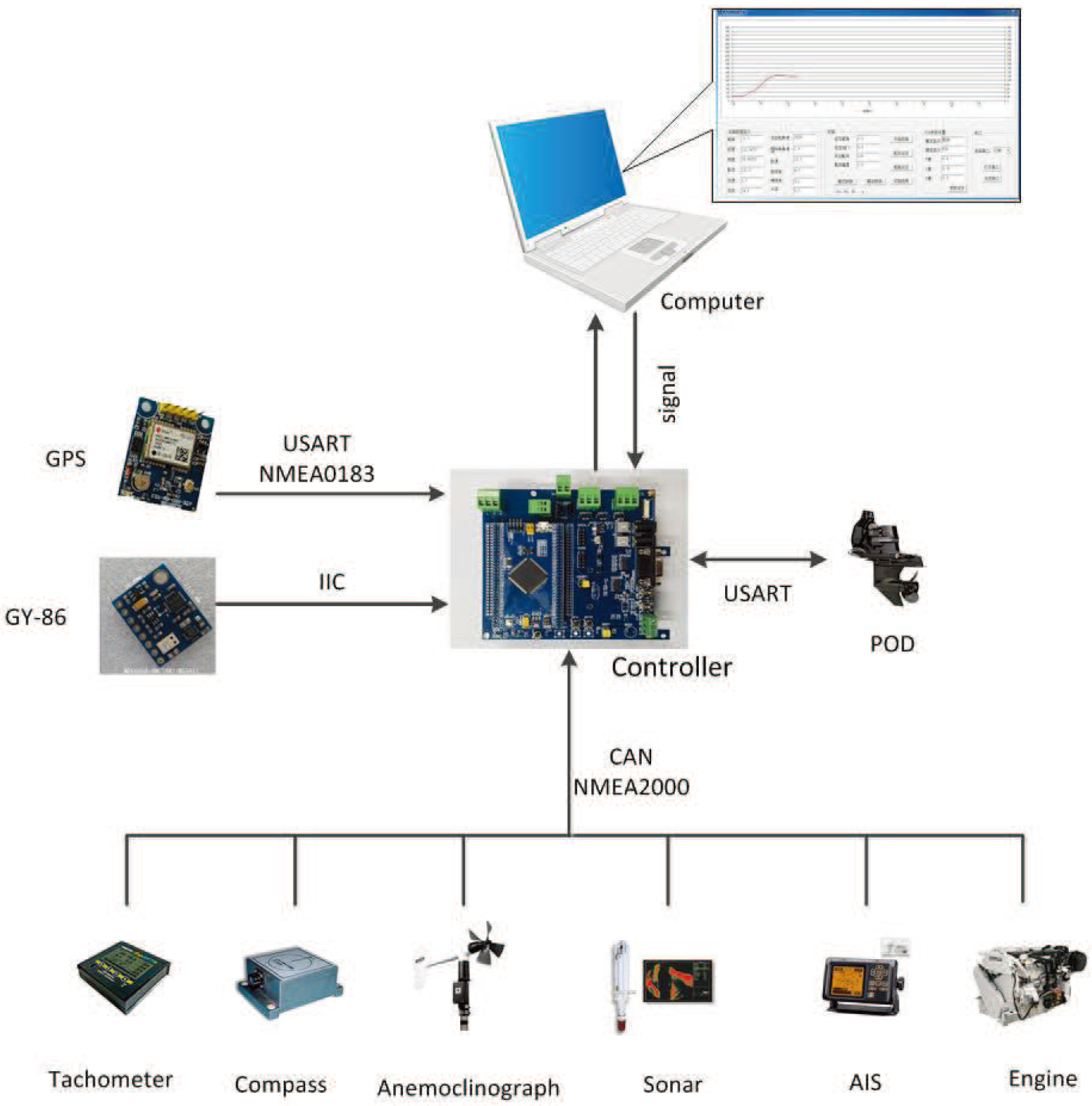
2.3. Platform of Sensor Network
2.4. Field Experiment
- (1)
- Experimental sea area: nearby waters (longitude: 121.5548, latitude: 38.8612).
- (2)
- Sea state: one-level marine conditions. The sea surface was quite calm, and the waves were 0–0.1 m high.
- (3)
- Weather: the weather was fine and the sea breeze was about a one-level northeasterly wind.
- (4)
- The driving speed of USV: this was kept at around 10 knots (corresponding to this, the engine speed was about 2800/min).
- (5)
- The contents of the record were the driving speed, V, course angle, , rotating speed of the propeller, n, surge velocity, u, sway velocity, v, and yaw rate, r.
- (6)
- Sampling frequency: 0.02 s.
- (7)
- The specific contents of the field experiment were the turning test (10°, 15°, 25°, 35°) and the zig-zag test (10°/10°).
3. Thruster Thrust Model and Servo Model
3.1. Thruster Thrust Model
3.1.1. Thrust Reduction Factor ()
3.1.2. Thrust Coefficient ()
3.2. Servo Model
4. Modeling
4.1. Three DOF Model
4.2. Response Model
5. Identification and Verification
5.1. Identification
5.1.1. Three DOF Model
- (1)
- Data: because the data of the zig-zag model is more able to exert the manoeuvre characteristics of the USV, it is used to identify the three DOF underactuated model. Of course, we mainly used u, v, r, n and in the zig-zag test.
- (2)
- and : based on the modeling of the thruster thrust in the Section 2, the real-time and were calculated based on the rotating speed of the propeller and the propulsion angle.
- (3)
- Based on the sampling time of 0.02 seconds, , and were calculated.
- (4)
- Recursive least squares method was used to identify the parameters of underactuated model.
5.1.2. Response Model
5.1.3. Servo Model
5.2. Verification
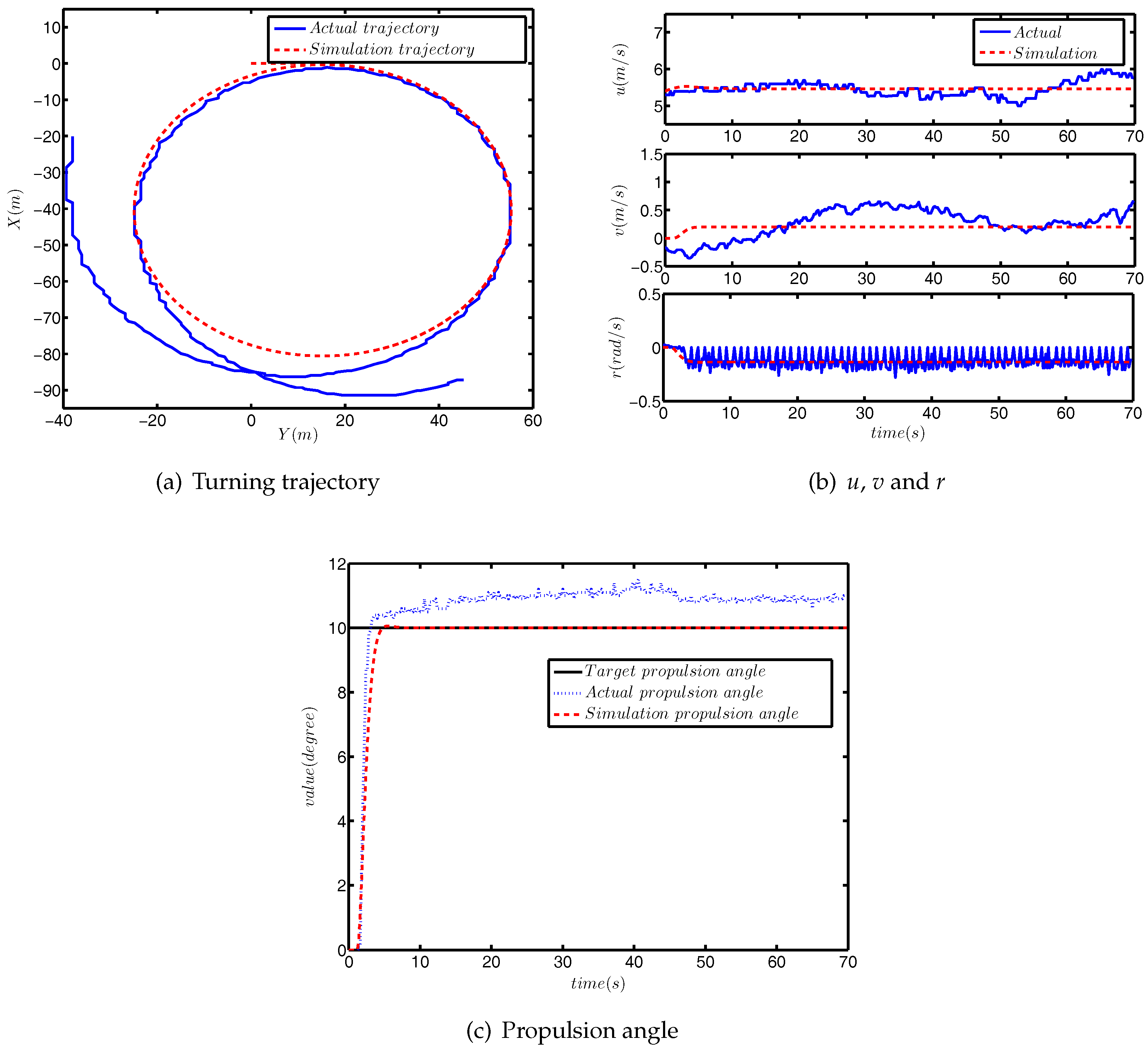
5.2.1. Three DOF Model
- (1)
- In terms of modeling theory, the derivation of the model is based on various assumptions and simplification. That is to say, it is difficult to fully reflect the characteristics of a USV with the mathematical model.
- (2)
- During the voyage, due to the influences of sea condition, operation and various factors, the structure and parameters of a USV will change. In addition, when designing various USV controllers, designers take the uncertainty of the model parameters or structure into account [37].
- (3)
- For the real ship, even though the related field experiments are carried out in a relatively calm sea area, the external interference is inevitable.
5.2.2. Response Model
6. Course Keeping Field Experiment
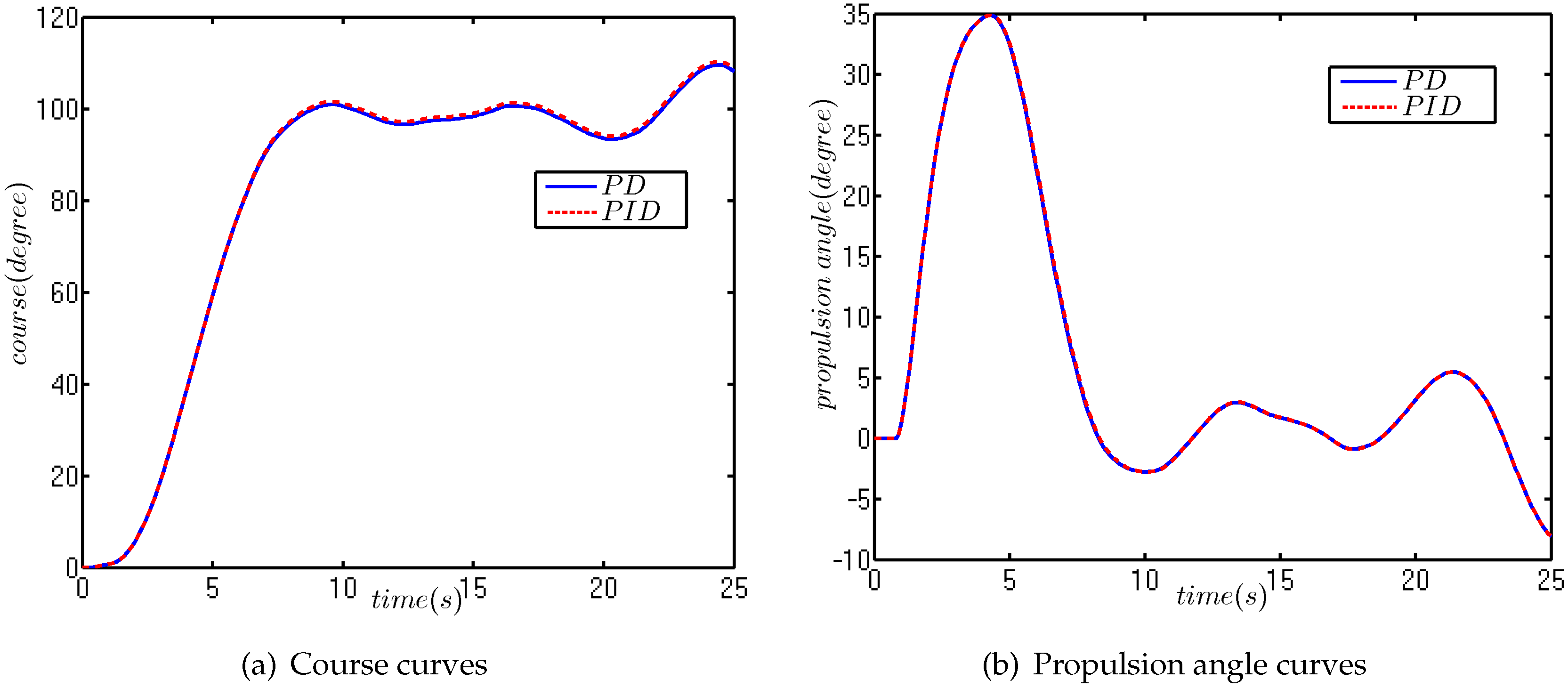
6.1. Numerical Simulation
6.2. Field Experiment
- (1)
- Experimental sea area: nearby waters (longitude:121.5548, latitude: 38.8612)
- (2)
- Sea state: three-level to four-level marine conditions.
- (3)
- Weather: the sea breeze was about three-levels north wind.
- (4)
- The driving speed of USV was kept at around 10 knots.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| USV | unmanned surface vehicle |
| DOF | degree of freedom |
| MMG | manoeuvring mathematical model group |
| EKF | extended Kalman filter |
| GPS | global position system |
| IIC | inter integrated circuit |
| NMEA | national marine electronics association |
| CAN | controller area network |
| MEMS | microelectro mechanical systems |
| MFC | microsoft foundation classes |
| PID | proportional integral derivative |
| PD | proportional derivative |
| ITAE | the integral of time-weighted absolute error |
References
- Zheng, J.; Meng, F.; Li, Y. Design and Experimental Testing of a Free-Running Ship Motion Control Platform. IEEE Access 2018, 6, 4690–4696. [Google Scholar] [CrossRef]
- Hou, X.R.; Zou, Z.J.; Liu, C. Nonparametric Identification of Nonlinear Ship Roll Motion by Using the Motion Response in Irregular Waves. Appl. Ocean Res. 2018, 73, 88–99. [Google Scholar] [CrossRef]
- Jiao, J.; Ren, H.; Adenya, C.A.; Chen, C. Development of a Shipboard Remote Control and Telemetry Experimental System for Large-Scale Model’s Motions and Loads Measurement in Realistic Sea Waves. Sensors 2017, 17, 2485. [Google Scholar] [CrossRef] [PubMed]
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-Varing Disturbances. Appl. Sci. 2018, 8, 547. [Google Scholar] [CrossRef]
- Mou, X.; Wang, H. Wide-Baseline Stereo-Based Obstacle Mapping for Unmanned Surface Vehicles. Sensors 2018, 18, 1085. [Google Scholar] [CrossRef] [PubMed]
- Wei, Y.; Zhang, Y. Effective Waterline Detection of Unmanned Surface Vehicles Based on Optical Images. Sensors 2016, 16, 1590. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Wang, D.; Wang, W.; Liu, L. Neural Adaptive Steering of an Unmanned Surface Vehicle with Measurement Noises. Neurocomputing 2016, 186, 228–234. [Google Scholar] [CrossRef]
- Yao, W.; Zhang, J.; Liu, Y.; Zhou, M.; Sun, M.; Zhang, G. Improved Vector Control for Marine Podded Propulsion Control System Based on Wavelet Analysis. J. Coast. Res. 2015, 73, 54–58. [Google Scholar] [CrossRef]
- Trancossi, M. Design of Acheon Thrust and Vector Propulsion System. In Proceedings of the SAE 2015 AeroTech Congress Exhibition, Seattle, WA, USA, 21–23 September 2015. [Google Scholar]
- Chen, C.W.; Cai, Q.W.; Yu, L.; Jiang, Y.; Kang, D.D.; Leng, J.X. Numerical Study of Hydrodynamic Performance of a High Maneuverability Ocean Engineering Ship with POD Propeller Design. In Proceedings of the OCEANS, Anchorage, AK, USA, 18–22 September 2017; pp. 1–5. [Google Scholar]
- Abkowitz, M.A. Lectures on Ship Hydrodynamics–Steering and Manoeuvrability; Hydro-and Aerodynamic Laboratory: Lyngby, Denmark, 1964. [Google Scholar]
- Abkowitz, M.A. Measurement of Hydrodynamic Characteristics from Ship Maneuvering Trials by System Identification. SNAME Trans. 1980, 88, 283–318. [Google Scholar]
- Asmara, I.P.S.; Kobayashi, E.; Pitana, T. Simulation of Collision Avoidance in Lamong Bay Port by Considering the PAW of Target Ship Using MMG Model and AIS Data. Mar. Eng. Front. 2014, 2, 31–38. [Google Scholar]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG Standard Method for Ship Maneuvering Predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef]
- Jia, X.L.; Yang, Y.S. Mathematical Model of Ship Motion-Mechanism Modeling and Identification Modeling; Dalian Maritime University Press: Dalian, China, 1999. [Google Scholar]
- Mu, D.; Wang, G.; Fan, Y. Design of Adaptive Neural Tracking Controller for Pod Propulsion Unmanned Vessel Subject to Unknown Dynamics. J. Electr. Eng. Technol. 2017, 12, 2365–2377. [Google Scholar]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. An Automatic Navigation System for Unmanned Surface Vehicles in Realistic Sea Environments. Appl. Sci. 2018, 8, 193. [Google Scholar]
- Mu, D.; Wang, G.; Fan, Y.; Zhao, Y. Modeling and Identification of Podded Propulsion Unmanned Surface Vehicle and Its Course Control Research. Math. Probl. Eng. 2017, 2, 1–13. [Google Scholar] [CrossRef]
- Wirtensohn, S.; Wenzl, H.; Tietz, T.; Reuter, J. Parameter Identification and Validation Analysis for a Small USV. In Proceedings of the 20th International Conference on Methods and MODELS in Automation and Robotics, Miedzyzdroje, Poland, 24–27 August 2015. [Google Scholar]
- Sathyaseelan, D.; Hariharan, G.; Kannan, K. Parameter Identification for Nonlinear Damping Coefficient from Large-Amplitude Ship Roll Motion Using Wavelets. Beni-Suef Univ. J. Basic Appl. Sci. 2017, 6, 138–144. [Google Scholar] [CrossRef]
- Luo, W.; Li, X. Measures to Diminish the Parameter Drift in the Modeling of Ship Manoeuvring Using System Identification. Appl. Ocean Res. 2017, 67, 9–20. [Google Scholar] [CrossRef]
- Skjetne, R.; Smogeli, Y.N.; Fossen, T.I. A Nonlinear Ship Manoeuvering Model: Identification and Adaptive Control with Experiments for a Model Ship. Model. Identif. Control 2004, 25, 3–27. [Google Scholar] [CrossRef]
- Araki, M.; Hosseini, H.S.; Sanada, Y.; Tanimoto, K.; Umeda, N. Estimating Maneuvering Coefficients Using System Identification Methods with Experimental, System-Based, and CFD Free-Running Trial Data. Ocean Eng. 2012, 51, 63–84. [Google Scholar] [CrossRef] [Green Version]
- Herrero, E.R.; González, F.J.V. Two-step Identification of Non-Linear Manoeuvring Models of Marine Vessels. Ocean Eng. 2012, 53, 72–82. [Google Scholar] [CrossRef]
- Sonnenburg, C.R.; Woolsey, C.A. Modeling, Identification, and Control of an Unmanned Surface Vehicle. J. Field Robot. 2013, 30, 371–398. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Zhang, X.; Pang, H. Multi-Innovation Auto-Constructed Least Squares Identification for 4 DOF Ship Manoeuvring Modelling with Full-Scale Trial Data. Isa Trans. 2015, 58, 186–195. [Google Scholar] [CrossRef] [PubMed]
- Guo, H.P.; Zou, Z.J. System-Based Investigation on 4-DOF Ship Maneuvering with Hydrodynamic Derivatives Determined by RANS Simulation of Captive Model Tests. Appl. Ocean Res. 2017, 68, 11–25. [Google Scholar] [CrossRef]
- Du, J.L.; Guo, C.; Zhang, X.K. Simulation studies on adaptive nonlinear control of ship motion course. J. Syst. Simul. 2005, 17, 1445–1448. [Google Scholar]
- Meziou, M.T.; Ghommam, J.; Derbel, N. Adaptive Backstepping Neural Network Approach to Ship Course Control. In Proceedings of the 8th International Multi-Conference on Systems, Signals and Devices, Sousse, Tunisia, 22–25 March 2011; pp. 1–7. [Google Scholar]
- Du, J.; Guo, C.; Yang, C. Adaptive Nonlinear Design of Autopilot for Ship Course Tracking. J. Appl. Sci. 2006, 24, 83–88. [Google Scholar]
- Zhang, G.; Zhang, X. A Novel DVS Guidance Principle and Robust Adaptive Path-Following Control for Underactuated Ships Using Low Frequency Gain-Learning. Isa Trans. 2015, 56, 75–85. [Google Scholar] [CrossRef] [PubMed]
- Shojaei, K. Neural Adaptive Robust Control of Underactuated Marine Surface Vehicles with Input Saturation. Appl. Ocean Res. 2015, 53, 267–278. [Google Scholar] [CrossRef]
- Du, J.; Hu, X.; Sun, Y. Adaptive Robust Nonlinear Control Design for Course Tracking of Ships Subject to External Disturbances and Input Saturation. IEEE Trans. Syst. Man Cybern. Syst. 2017, 1–10. [Google Scholar] [CrossRef]
- Norrbin, N.H. Theory and Observations on the Use of a Mathematical Model for Ship Manoeuvring in Deep and Confined Waters; Statens Skeppsprovningsanstalt: Gothenburg, Sweden, 1971. [Google Scholar]
- Zhang, X.; Zhang, G. Design of Ship Course-Keeping Autopilot Using a Sine Function-Based Nonlinear Feedback Technique. J. Navig. 2016, 69, 246–256. [Google Scholar] [CrossRef]
- Nomoto, K.; Taguchi, K.; Honda, K.; Hirano, S. On the Steering Qualities of Ships. Int. Shipbuild. Prog. 1957, 4, 354–370. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, B.; Mao, D. Robust Sliding Mode Control of PMSM Based on Rapid Nonlinear Tracking Differentiator and Disturbance Observer. Sensors 2018, 18, 1031. [Google Scholar] [CrossRef] [PubMed]
- Lopezfranco, C.; Gomezavila, J.; Alanis, A.; AranaDaniel, N.; Villaseñor, C. Visual Servoing for an Autonomous Hexarotor Using a Neural Network Based PID Controller. Sensors 2017, 17, 1865. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Length between perpendiculars | 7.02 m |
| Breadth | 2.60 m |
| USV speed (max) | 35 kn |
| Draft (full load) | 0.32 |
| Block coefficient | 0.6976 |
| Displacement (full load) | 2.73 m3 |
| Rudder area | 0.2091 m2 |
| Propulsion angle (max) | 35 degrees |
| Distance Between gravity and center | 0.35 m |
| Pitch ratio | 0.3 |
| Disk surface ratios | 0.516 |
| Diameter of the propeller | 0.46 m |
| Item | |||
|---|---|---|---|
| −0.1677 | −0.0517 | −0.2191 | |
| 0.1747 | −0.0315 | 0.3013 | |
| −0.6720 | −0.5822 | −0.7309 | |
| 0.8042 | 0.5853 | −0.8502 | |
| −0.1437 | −0.1026 | −0.1080 | |
| 0 | 0 | 0 | |
| −0.8853 | −0.3381 | −1.0738 | |
| 0.9130 | 0.6654 | 0.9908 | |
| 0.3422 | 0.1417 | 0.3481 | |
| −0.3276 | −0.2215 | −0.3322 |
| Item | Value |
|---|---|
| PID | 37.98 |
| PD | 38.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, D.; Wang, G.; Fan, Y.; Sun, X.; Qiu, B. Modeling and Identification for Vector Propulsion of an Unmanned Surface Vehicle: Three Degrees of Freedom Model and Response Model. Sensors 2018, 18, 1889. https://doi.org/10.3390/s18061889
Mu D, Wang G, Fan Y, Sun X, Qiu B. Modeling and Identification for Vector Propulsion of an Unmanned Surface Vehicle: Three Degrees of Freedom Model and Response Model. Sensors. 2018; 18(6):1889. https://doi.org/10.3390/s18061889
Chicago/Turabian StyleMu, Dongdong, Guofeng Wang, Yunsheng Fan, Xiaojie Sun, and Bingbing Qiu. 2018. "Modeling and Identification for Vector Propulsion of an Unmanned Surface Vehicle: Three Degrees of Freedom Model and Response Model" Sensors 18, no. 6: 1889. https://doi.org/10.3390/s18061889
APA StyleMu, D., Wang, G., Fan, Y., Sun, X., & Qiu, B. (2018). Modeling and Identification for Vector Propulsion of an Unmanned Surface Vehicle: Three Degrees of Freedom Model and Response Model. Sensors, 18(6), 1889. https://doi.org/10.3390/s18061889