1. Introduction
Wireless sensor networks (WSNs) have developed rapidly due to their ubiquitous applications in a wide range of areas, such as military, transportation, and disaster rescue [
1,
2,
3,
4]. In conventional WSNs, sensor nodes are powered by batteries and may not be recharged after deployment. As a result, the network lifetime is severely restricted due to the limited energy provided by the on-board battery. As a promising solution, energy harvesting technologies can combat this power limitation by collecting energy via solar or electromagnetic signals [
5,
6]. As a representative technology, wireless power transfer (WPT) has several advantages, including a long transmission range and controllable transmission pattern. With the support of WPT, the applications of WPT-based energy harvesting can be divided into two branches. The first branch is the simultaneous wireless information and power transfer [
7,
8,
9], where harvesting energy and information transmission are realized over the separated radio frequency signals simultaneously. The second branch is the wireless powered communication networks (WPCNs). Each user node (UN) in a WPCN harvests energy from an energy transmitter (ET) in the downlink and uses the energy to transmit information in the uplink. Compared to conventional WSNs, WPCNs have a prolonged operating lifetime and provide stable energy to UNs, i.e., sensor nodes [
10].
However, the throughput fairness in WPCNs remains challenging due to the diversity of the nodes’ physical channel states. In contrast to a stable, on-board, battery energy supply, radio-frequency-based WPT is closely related to the different channel state of each UN. The channel states among UNs are highly diverse due to their distributed locations in WPCNs. The UNs that are further from the ET receive less energy than those closer to the ET. Consequently, the “far” UNs transmit less data than the “near” UNs. Such a “near-far” effect leads to throughput performance unfairness [
11].
Prior works have attempted to address this problem in two ways: Equalization-based and cooperation-based approaches. The former type of approach aims to equally balance the throughput by controlling the energy distribution, for example, signal beamforming [
12], or by metric-tuning, such as the common throughput [
11] and weighted sum-rate [
13]. These approaches, however, suffer from either costly hardware, e.g., multi-antenna ET, or strong dependence on the link state between the UNs and ET, as well as between the UNs and the information receiver. On the other hand, the cooperation-based approach establishes cooperation among several UNs to achieve a “win-win” result by designing routine selection, power control, or time allocation mechanisms. In addition to the additional cost and complexity of deployment, dedicated designs that comprehensively combine the above mechanisms are difficult to achieve. Meanwhile, prior works focus on single transmission and fixed paths between source-destination pairs; they do not consider user cooperation in multi-hop transmissions, which is essential for achieving fairness in cooperative WPCNs. In [
14], they tested the user cooperation between two UNs and proved that it helped to improve the throughput fairness in a simple two-hop WPCN. However, they assumed that only two UNs transmitted information in the WPCN. In actual multi-user networks, the reasonable transmission path for improving throughput fairness cannot be ignored.
In this paper, we consider user cooperation in the multi-hop WPCN and find the optimal transmission path in the max-min throughput (MMT) problem. We further formulate this problem as a mixed-integer nonlinear programming (MINLP) model, which is NP-hard and subject to time allocation, energy harvesting, and traffic conservation constraints. The problem cannot be solved directly by existing methods. We design an approximate algorithm, namely, new max-min throughput algorithm (NE-MMT), where the power control, time allocation, and link scheduling are jointly optimized. We present the tight upper and lower bounds of the optimal solution. The extensive simulation results show that NE-MMT can significantly enhance the throughput fairness of WPCNs.
The remainder of the paper is organized as follows. In
Section 2, we describe related works. In
Section 3, we describe the system model and the MMT problem formulation. In
Section 4, we introduce our algorithm for solving the problem. In
Section 5, numerical simulations, the performance analysis of our method, and the proposed algorithm are given.
Section 6 concludes the paper.
2. Related Work
Methods to improve fairness to combat the “near-far” effect in WPCNs are widely researched. Multi-antenna ET has been proposed to perform the WPT, with the energy beamforming during energy harvesting [
12]. In [
13], the weighted sum-rate maximization problem was considered to incorporate fairness based on energy beamforming. In [
15], energy beamforming was optimally designed for a WPCN in which multiple antennas were equipped at the ET and user cooperation between two UNs was considered. Due to the complexity and high cost of multi-antenna ET deployment, some solutions have considered resource allocation to balance the throughput among UNs in the single-antenna ET case.
In [
11], the authors defined a performance metric called common throughput to evaluate the constraint where all UNs were assigned equal throughput by time allocation, regardless of their locations, to address the double “near-far” effect. Based on the same system model in [
11], the authors considered the circuit power dissipation, which was not negligible, especially for the WPT. They also proposed a low-complexity, fixed-point, iteration algorithm for the MMT problem in [
16]. Because cooperation is an efficient method to improve fairness in wireless powered networks, energy and transmission cooperation have been widely studied [
17,
18,
19,
20]. In [
21], they considered cooperation in terms of energy, rather than information, and solved an online optimization problem to focus on the long-term weighted throughput performance. In [
22], they proposed a novel energy cooperative framework in which the “far” UNs can harvest energy continuously by overhearing signals sent by nearer UNs to the destination node before its information transmission. This cooperative protocol can significantly improve user fairness. In addition to energy cooperation, there has been some research in transmission cooperation. In [
20], a “harvest-then-cooperate” protocol was proposed in which the UNs and their dedicated relay nodes harvest energy and then cooperatively work to transmit the information of the UNs to improve the fairness. The relay selection problem, based on the user and relay cooperation, was studied in [
23]. The authors maximized the capacity under an energy transfer constraint. In [
24], they proposed a Nash bargaining approach to achieve optimal information transmission efficiency of source-destination pairs, with multiple source-destination pairs and one relay. However, setting dedicated relay nodes adds additional costs and increases deployment complexity.
User cooperation is another method to improve fairness performance. User cooperation helps the UNs that harvested more energy to relay the information of the UNs that have less energy or poorer transmission channel states [
14]. In [
25], they presented a new pricing strategy to motivate one UN, with more energy, to sell its excess energy to help another UN, with less energy, complete a uplink information transfer. The “relay” UN placement and the UN’s communication mode selection problems were also discussed. In [
26], the paper considered two communication groups that cooperated via the WPT and time sharing to fulfill their expected information delivery and achieve a “win-win” collaboration. In [
27], they presented a new user cooperation method where a pair of wireless powered UNs first exchanged their independent messages with each other and then transmitted jointly to the destination node, enhancing the throughput fairness in WPCNs. In [
28], they considered implementing energy-efficient information transfer to mitigate the “near-far” effect. They proposed an optimized transmission protocol to maximize the sum-throughput and chose an appropriate device-to-device communication mode.
In user cooperation, the forwarding UNs must sacrifice harvested energy and transmission time to improve the throughput of the UNs with less energy. If a UN forwards a large amount of information, then the UN needs to spend more time to harvest energy. However, more time spent harvesting energy may lead to less time for transmission for a given time length because UNs cannot simultaneously harvest energy and transmit information in a half duplex [
29,
30]. Therefore, in the WPCN, the UNs must select a reasonable forwarding UN. Improving fairness performance requires a combination of reasonable routine selection, power control, and time allocation.
To the best of our knowledge, all the works above improve the fairness via power control and time allocation based on a fixed transmission path and do not consider multi-hop transmission based on user cooperation. In [
31], the letter focused on fairness-aware power and time allocation in the WPCN under the “harvest-then-transmit” protocol in which downlink wireless energy transfer was implemented first and, then, uplink wireless information transfer occurred in a spectrum-sharing fashion. They aimed to achieve the rate fairness of all UNs under three fairness criteria: Max-min, proportional, and harmonic fairness. In [
32], they studied fairness among UNs and presented a time resource allocation scheme to maximize the individual energy efficiency of each UN based on the max-min criterion. However, they considered the single transmission method without user cooperation.
3. System Model and Problem Formulation
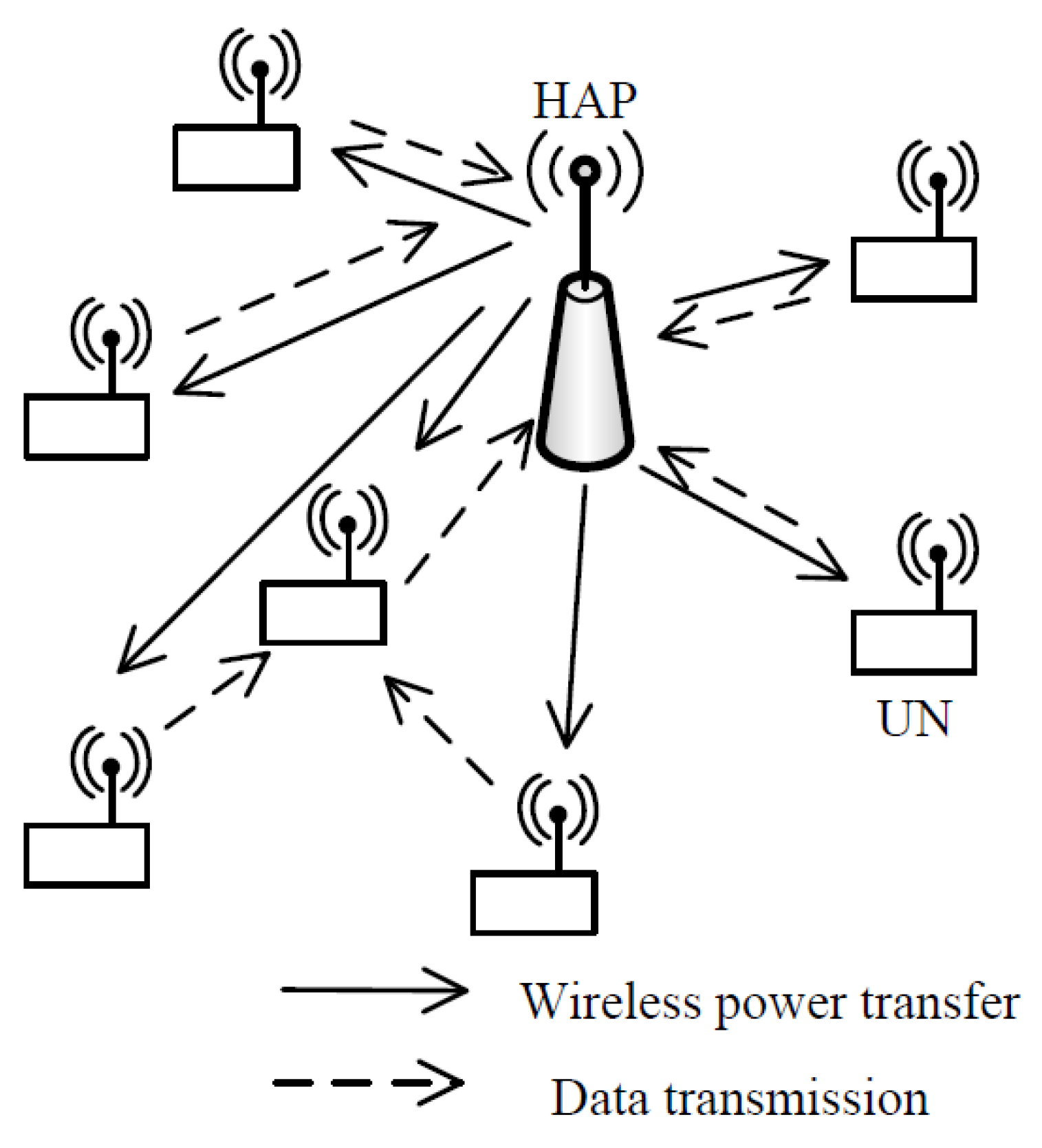
We consider a WPCN consisting of a hybrid access point (HAP), denoted by
, and a set of UNs,
, without fixed energy sources, as shown in
Figure 1. According to the “harvest-then-transmit” protocol, the HAP provides wireless power to all the UNs in the downlink; then, all UNs use the harvested energy to transmit information to the HAP. Due to the “near-far” effect, the UNs close to the HAP obtain more energy than those far from the HAP. More importantly, these “far” UNs consume more energy to transmit information due to the poorer channel quality. Therefore, we consider multi-hop transmission to help the “far” UNs to transmit information.
Before a time block starts, the HAP first uses the algorithm mentioned later to calculate the information, such as forwarding path, transmission time, etc. Then, the HAP broadcasts the information to the UNs. Based on the information, each UN controls its operation in the time block. Since the energy consumption of receiving the controlling information is much less than that of transmission information in the time block, its energy cost is ignored [
14,
25,
26,
27,
32].
In the time block, the UNs harvest energy from the HAP during the downlink, which is denoted by
. Let
denote the link formed between the HAP and the UN,
, during the downlink. The downlink power gain of link,
, is denoted by
. We use
to denote the transmission power of the HAP. The available harvesting energy of the UN,
, is given by the following equation [
11]:
where
represents the power conversion efficiency, which is generally 50–70%. Each UN starts to transmit its information through its output links after it receives the harvested energy. Receiving information and transmitting energy simultaneously causes self-interference at the HAP; thus, the HAP acts only as a sink in the uplink and does not provide wireless power.
We denote the set of all UNs and the HAP as
and use
to denote the link formed between the node,
, and the node,
, in the uplink, where
and
. The uplink power gain of the link,
, is denoted by
. In the transmission uplink, the link may be active for forwarding information only if the quality of the link,
, is better than that of the link,
. Otherwise, the link,
, is inactive and the UN,
, transmits information to the HAP directly due to the limited harvested energy. Links that may be active are called feasible links. The set of all feasible links is denoted by
. We introduce the binary variable,
, to indicate whether the feasible link,
, is active in the uplink,
. If the link,
, is active, then
is one; otherwise, it is zero. When the link,
, is active, its reverse link must be silent in the uplink. Thus, we have:
Let
denote the transmission time of the link,
. For the convenience of this discussion, we normalize a length of one time block into unit time. We can express the time constraint as:
where Equation (3) guarantees that the sum of the time for harvesting energy and the time for transmission information does not exceed the length of the time block and then Equation (4) ensures that the transmission time of one feasible link is zero when the link is inactive in the time block. We use
, which takes a value in
, to denote the transmission power of the UN,
. During the transmission phase, the energy consumption also includes non-ideal circuit energy consumption, such as sampling and signal processing. We use
to denote the additional circuit loss energy consumption [
33]. The transmission energy consumption of the UN,
, is expressed by:
Using the time-division multiple access method for transmission avoids co-channel interference, that is, only one link at a time can be active for data transmission. Therefore, the quality of each active link depends on only the corresponding signal-to-noise ratio (SNR). We use
to denote the SNR of the link,
. Once the transmission node,
, of the link,
, determines the level of transmission power, the link capacity,
, can be calculated by:
where
,
is the bandwidth,
is the noise power, and
is base 2 logarithm. We use
to indicate the amount of information passing through the link,
, in the time block. Then, in the time,
, the amount of information transmitted,
, must satisfy the following capacity constraint:
When the receiving node,
, receives data through the link,
, it consumes a certain amount of energy for the energy dissipation of the radio, which is caused by running the receiver circuitry and is denoted by
nJ/bit. The energy consumed by the UN,
, to receive information is expressed as [
34]:
With the inequalities (1), (5), and (8), the energy constraint of the UN,
, can be expressed as:
The data generated and forwarded by each UN must be transmitted through multiple output links. We use
to represent the amount of data generated by the UN,
. Then, the UN,
, must satisfy the traffic constraint:
Before the end of the time block, the data of each UN must be fully imported into the HAP; therefore, the HAP must satisfy the following traffic conservation constraint:
where
denotes the receiving data of the HAP in the time block. Constraints (7) and (10) ensure the reliability of each active link. If (7) and (10) hold, then (11) is satisfied; therefore, constraint (11) can be relaxed. Let
denote the minimum value of the transmitted information of the UNs in the time block; then, the amount of transmitted data for each UN is no less than the values in the time block, that is:
The MMT problem is an important issue for optimizing throughput fairness. In this paper, we focus on resource allocation in the max-min problem. As a common indicator of throughput fairness in the MMT problem, we adopt the minimum throughput of the UNs as the performance metric [
11], i.e., the amount of data,
. With (12), the objective function of the max-min problem can be transformed into maximizing the amount of data,
. The max-min problem is modeled as the MMT, which is:
The MMT is a MINLP model. Such programming problems are, generally, NP-hard [
35]. The existing methods cannot be used to solve the problem directly. The programming model shows that the main challenges in solving the model are as follows: (1) The multiplication of the nonlinear
function and linear variable appears on the right side of constraint (7) in the MMT; and (2) bi-linear products, such as
, exist. In the next section, we propose converting the model to a mixed-integer linear programming (MILP) model via the piece-wise linear (PWL) method. Based on the PWL method, we propose an approximate algorithm called NE-MMT.
4. NE-MMT Approximate Algorithm for the Max-Min Problem
In the MMT, constraint (7) contains the function, which leads to the main difficulty in solving the problem. We use the PWL method to transform constraint (7) into a linear constraint.
4.1. PWL Method to Transform the Nonlinear Function into a Piece-Wise Linear Function
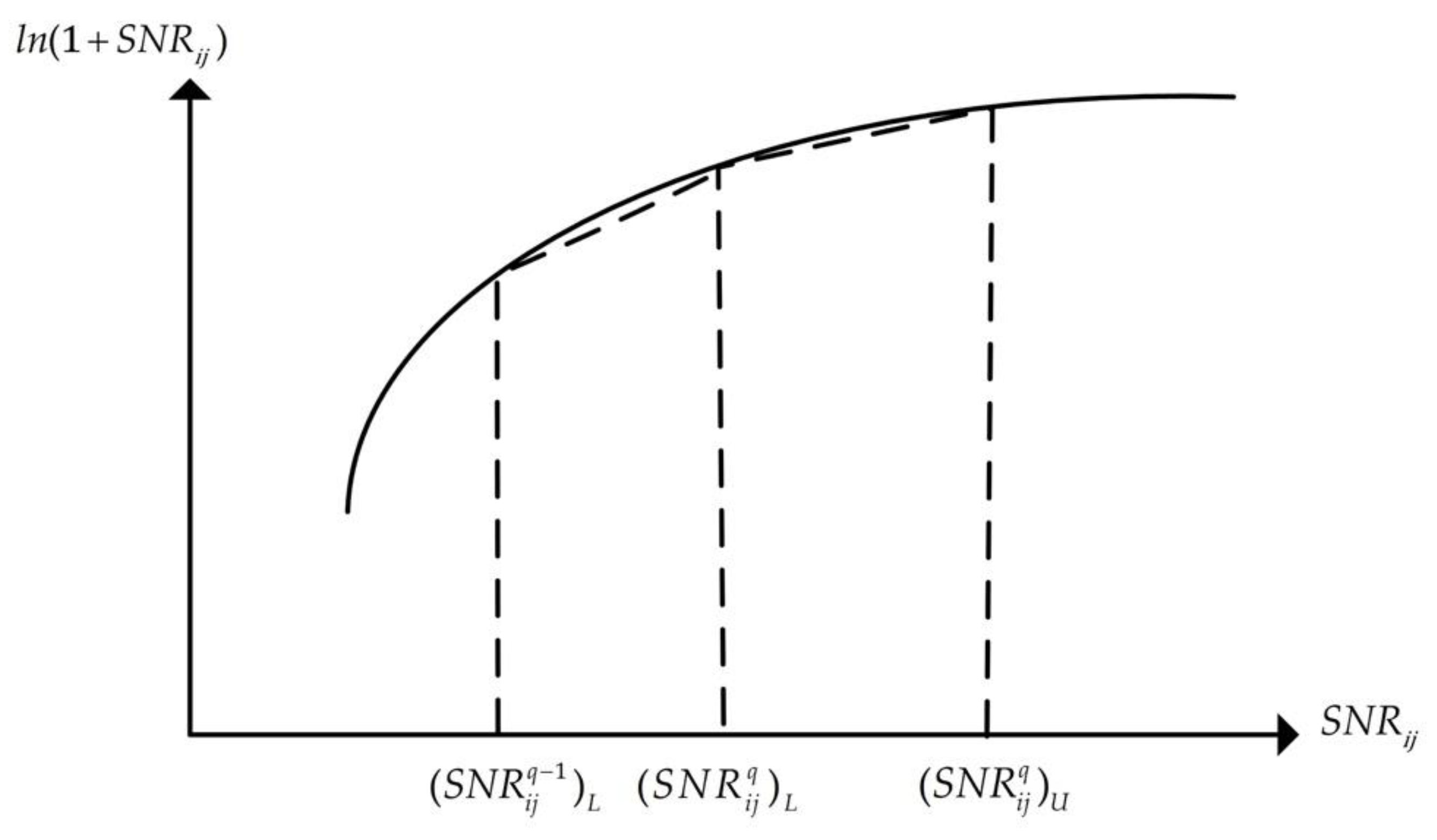
We use the proposed PWL method to linearize the
function term [
36], as shown in
Figure 2. The idea behind the PWL method is to approximate the
curve (base e) by a set of line segments and guarantee that the gap between the piece-wise function and the
function (base e), denoted as the
function, is less than a threshold. We denote the threshold as
. For the sake of discussion, we use the following constraint in place of constraint (6):
Since the
function of the corresponding active links,
, is a function of the
variable, we segment the interval of
, which is
, into multiple segments. We use
to denote the number of segments in the interval,
. The
th interval segment is expressed as
. The slope of the
th piece-wise segment corresponding to
is denoted by
and is expressed as:
Next, we determine the value of via the PWL method, such that the gap between the piece-wise function and the log function is less than the threshold, . The process of the PWL method is shown in Algorithm 1.
| Algorithm 1: Piece-wise Linear Method |
Initialization: , , . Use Newton’s method to solve the following equation: Determine the slope .
- 3.
Use Newton’s method to solve Equation (14) to obtain If then stop and set and to and . Otherwise, continue to step 4. - 4.
Use the equation to obtain the value of . Set = , return to step 2.
|
The
function of the variable,
, can be transformed to a linear piece-wise via Algorithm 1. The value of the linear piece-wise function is the lower bound of that of the
function. We convert constraint (7) to the following group of constraints with the log function:
After replacing constraint (7) in the MMT with constraint (15), all the terms are linear in the MMT, except for the term
. We use a new variable,
, to represent the bi-linear product term. The MMT can be transformed into MMT1 as follows:
The new model eliminates the variable, , and is a MILP problem that can be easily solved by existing optimization software, such as Gurobi and CPLEX. We now give the relationship between the solution of the MMT and that of the MMT1.
Lemma 1. The optimal solution of the MMT1 is a feasible solution of the MMT.
Proof. The only difference between the MMT and the MMT1 is the capacity constraint. The capacity constraint in the MMT1 is obtained by linearizing the right term of the corresponding constraint in the MMT. For the given values, and , the value of the right term of the capacity constraint (15) in the MMT1 is no more than that of the capacity constraint (7) in the MMT. The solution space of the variable, , in the MMT1 is covered by that in the MMT. Because of the same solution spaces of the other variables, the optimal solution in the MMT must be a feasible solution to the MMT. □
We see from Lemma 1 that the optimal solution in the MMT1 provides a lower bound to that of the MMT. We rewrite the group of capacity constraints in the MMT1 as:
With the new capacity constraint (16), we build a new model as the MMT2:
Through a similar proof as that of Lemma 1, we can find the upper bound of the optimal solution of the MMT.
Lemma 2. The optimal solution of the MMT2 is the upper bound of that of the MMT.
Proof. The only difference between the models of the MMT and the MMT2 is the use of capacity constraint (7) in the MMT and constraint (16) in the MMT2. The capacity of the link,
, in the MMT is no more than the upper bound value. Thus, we have:
Since the transmission time of the link,
, is subject to
, we have:
The solution space of the variable, , in the MMT is covered by that in the MMT2, . Because of the same solution space for the other variables, the optimal solution of the MMT2 is the upper bound of the optimal solution of the MMT. □
Although we cannot obtain the optimal solution of the problem, we use Lemmas 1 and 2 to determine the boundaries of the optimal solution. However, we do not know how large the gap between the upper and lower bounds is. We use the approximate algorithm in the next section to ensure that the gap is within a specified range.
4.2. Approximate Algorithm for the Max-Min Problem
In the MMT, the group of variables, , is the unique integer variable set, . As the active state of the link, , and the transmission power of the transmission node are given, the MMT is transformed into a linear programming model of the traffic and time allocation. We use to denote the case of a determined state of the link, , and the chosen transmission power of the UN, , Then, for the given case, , the MMT is expressed as the MMT as:
MMT
where
denotes the set of active links in the given
case, and
represents the capacity of the link,
, in the given case, which can be calculated by (6). We use (15) to obtain the capacity of the link,
, in the same case and denote it as
. If we use the constraints (22) and (23) in place of the capacity constraint (21), the model MMT
is transferred into two new models, denoted by MMT-UP
with constraint (22) and MMT-DOWN
with constraint (23):
According to Lemmas 1 and 2, we obtain the upper and lower bounds of the optimal solution of the MMT by solving the MMT-UP and the MMT-DOWN, respectively. We denote the upper and lower bounds in the given case as and . The gap between the upper and lower bounds is denoted by , that is, . We find the characteristics of the gap in the given case.
Lemma 3. In the givencase, the gap.
Through Lemma 3, we determine the relationship between the upper and lower bounds of the MMT. We use and to represent the upper and lower bounds, which are obtained by solving the MMT2 and the MMT1. The gap between them is denoted by .
Lemma 4. Assume that the number of feasible links is; then, the gap between the upper and lower bounds of the optimal solution of the MMT is no less than, that is,.
Proof. We use to represent the optimal solution of the MMT. In the given case of , the optimal solutions of the MMT2 and MMT1 are expressed as and , respectively. According to Lemma 3, , where represents the optimal set of active links. Since , we obtain . □
According to Lemma 4, the gap between the optimal solution of the original problem and the upper bound or lower bound is no greater than . We propose our following NE-MMT approximate algorithm based on Lemma 4.
| Algorithm 2: NE-MMT Algorithm |
Initialization: . Solve the following equation: . Determine . Use the PWL method to transform the MMT into a MILP model. Solve the MMT-UP or MMT-DOWN with a solver, such as CPLEX. Obtain an approximate solution.
|
Algorithm 2 produces the upper and lower bounds of the original problem. A smaller value of indicates that the performance of the solution is closer to the optimal solution.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









