A Novel Ship-Tracking Method for GF-4 Satellite Sequential Images

Abstract
:1. Introduction
2. Proposed Method Framework
2.1. Ship Detection
2.2. Position Correction
2.2.1. RPCs Model
2.2.2. Ship Association
- (1)
- Each time 3 pairs of matching points are randomly selected to calculate the affine transformation parameters, and then obtain the error of other point pairs under the current transformation. The point pair whose error is smaller than a certain threshold is used as the interior point, and the interior point set is saved;
- (2)
- Repeat random sampling to get the maximum interior point set;
- (3)
- The LS algorithm is used to solve the affine transformation parameters for the maximum interior point set. When solving the affine transformation parameters, a point position of AIS is referred , and the corresponding matching point of GF-4 detection is referred .
2.3. Ship Tracking
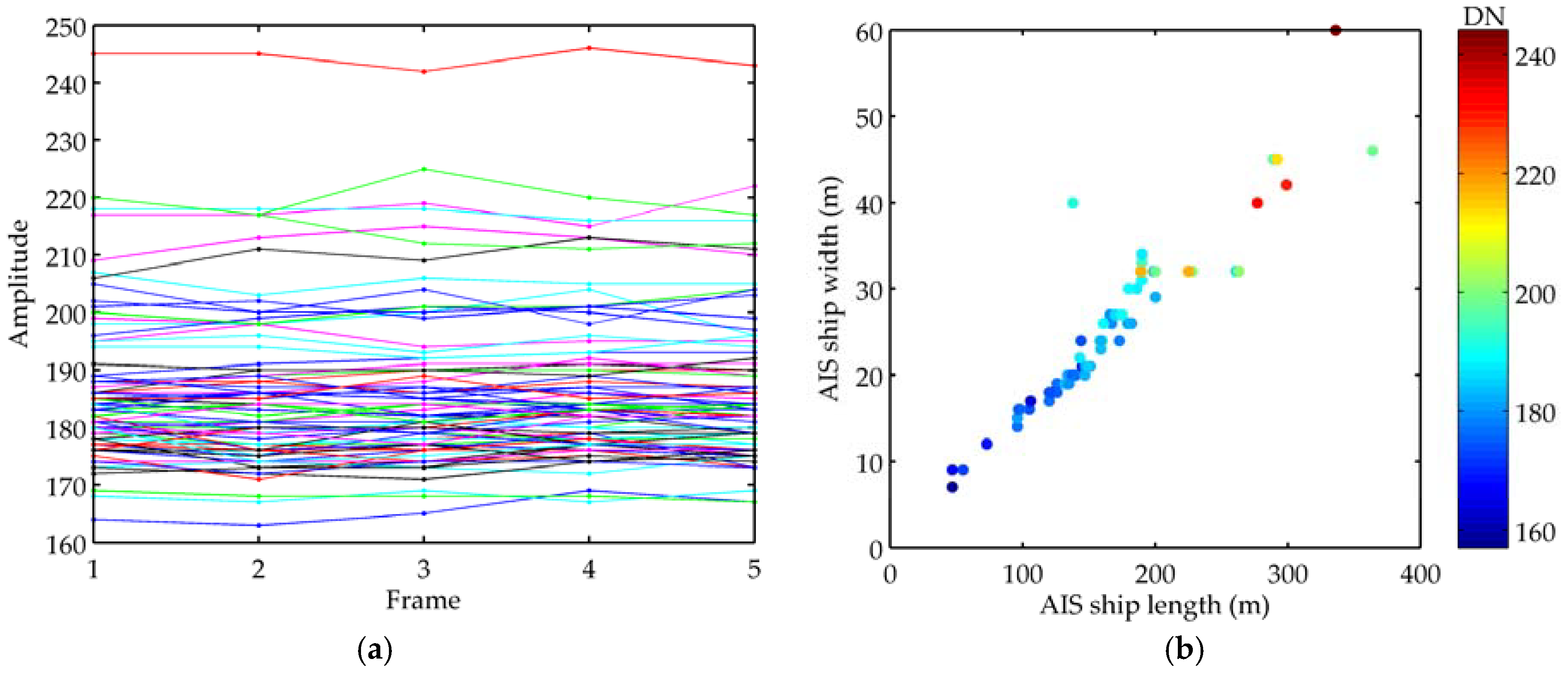
2.3.1. Ship Modeling
2.3.2. MHT Tracker
3. Experiments and Results
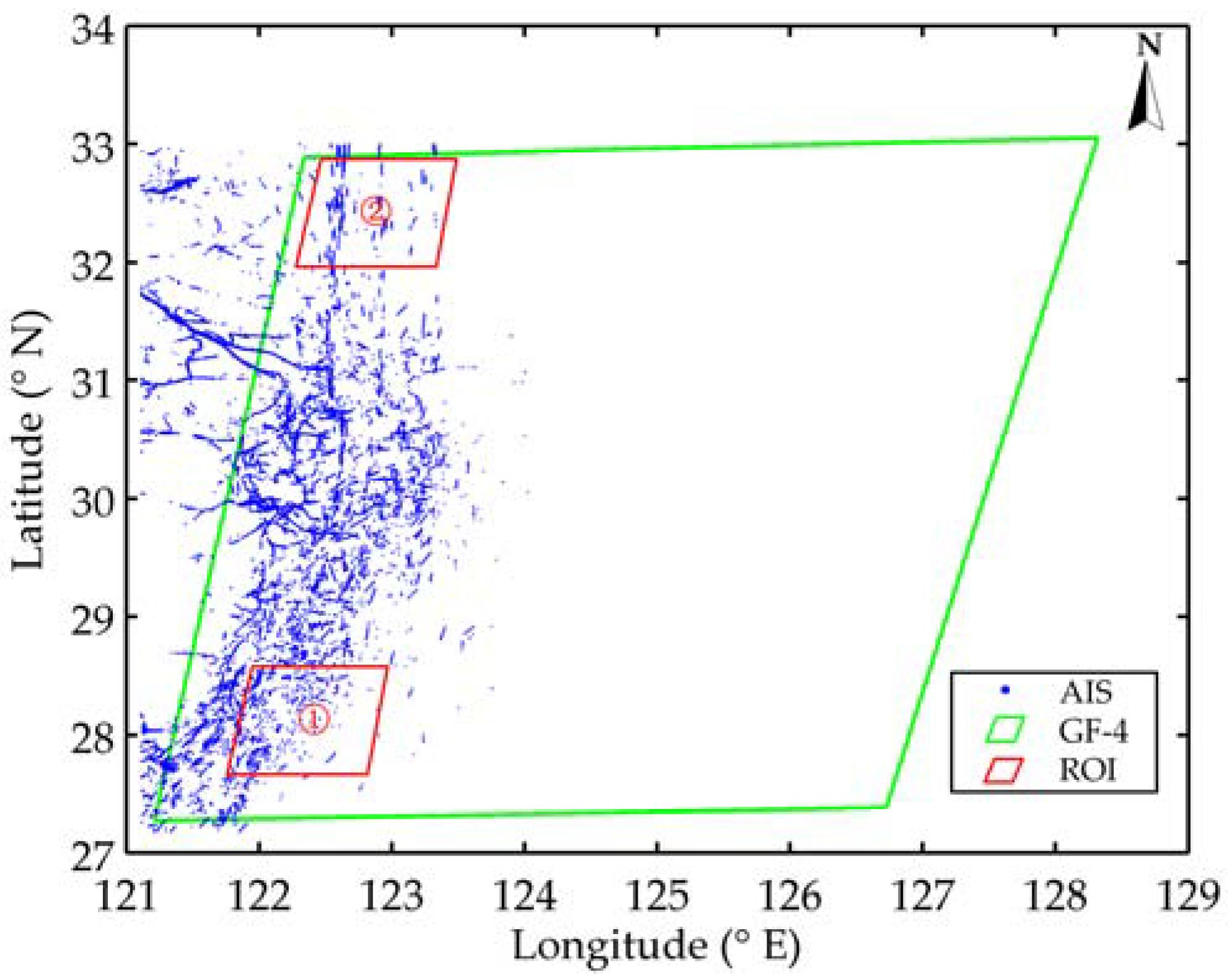
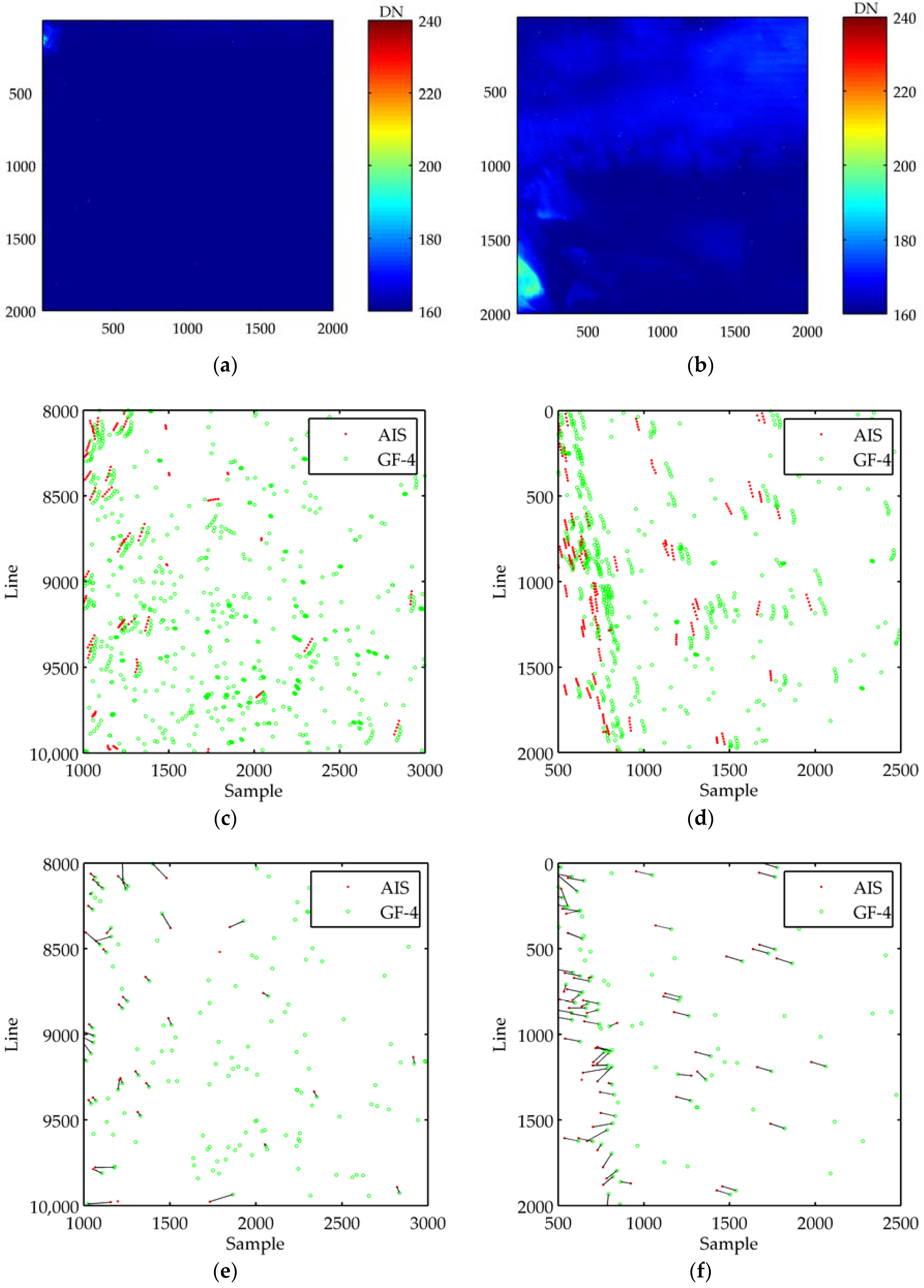
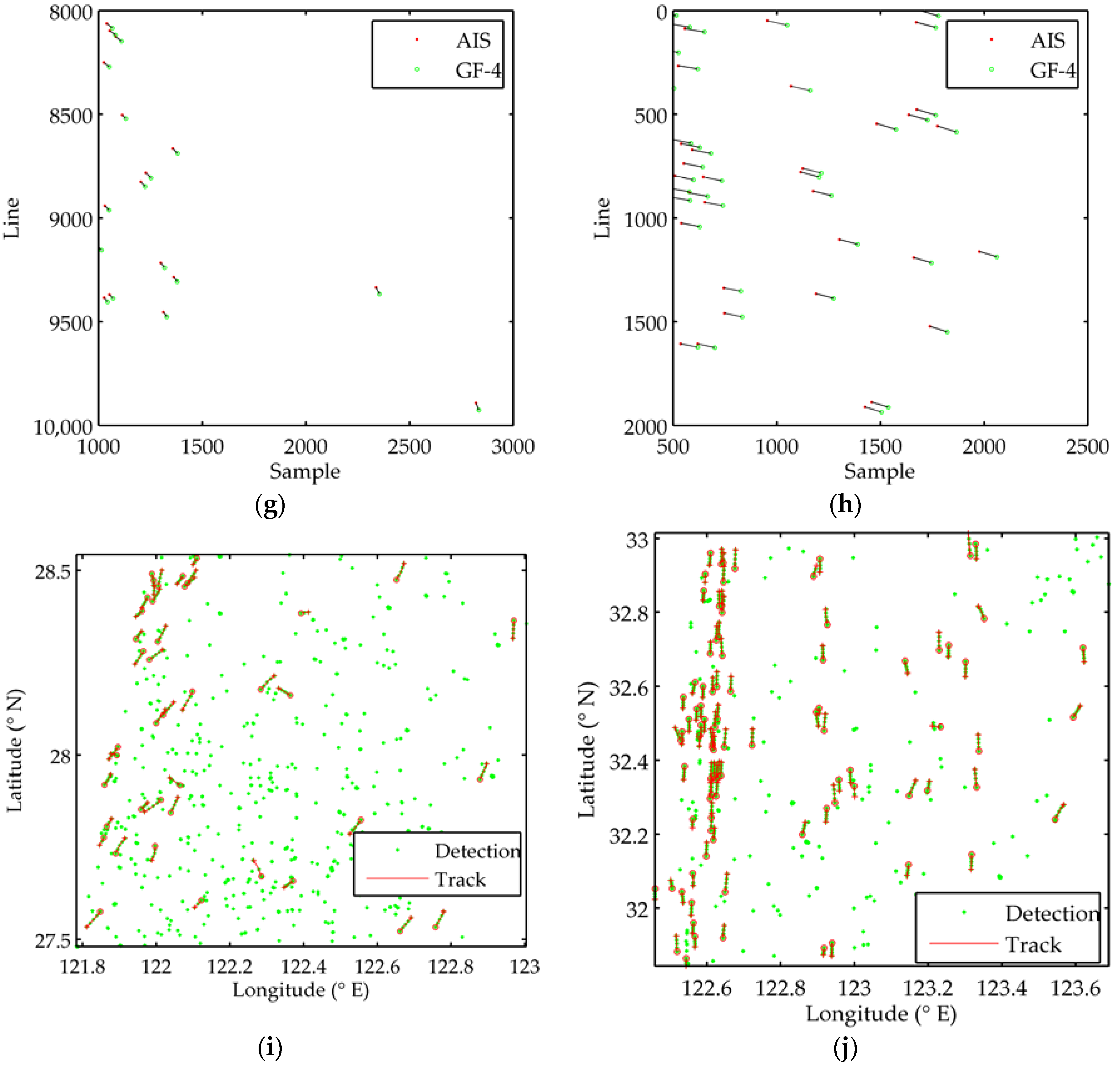
3.1. Dataset
3.2. Evaluation
3.2.1. Quantitative Evaluation Metrics
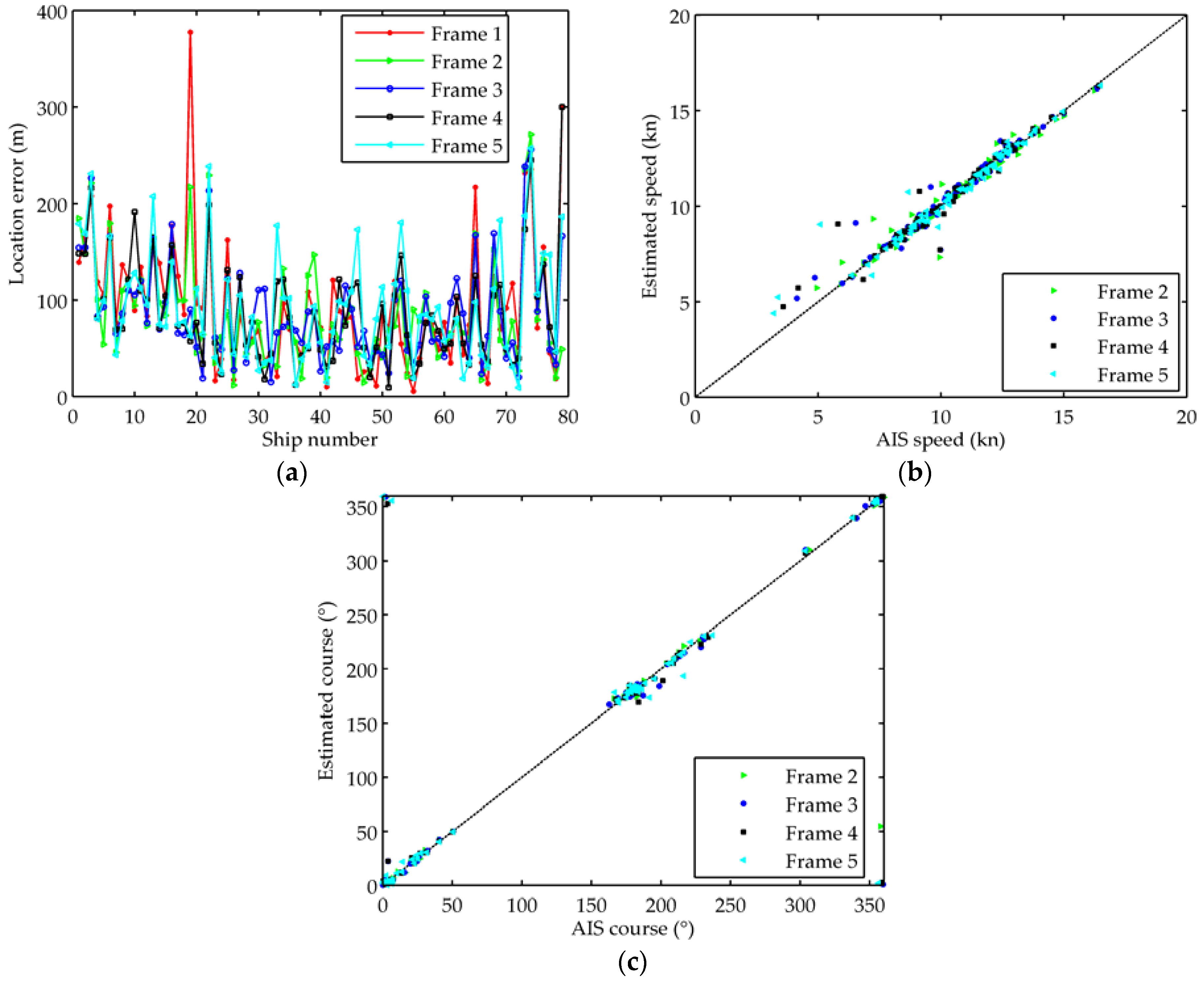
3.2.2. Quantitative Evaluation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kong, X.H.; Li, X.; Chen, Z.Y.; Yang, H.; Li, G. Continuous observation oriented application mode design and analysis for geostationary-orbit high-resolution optical imaging satellites. Image Sci. Photochem. 2016, 34, 43–50. [Google Scholar]
- Wang, D.Z.; He, H.Y. Observation capability and application prospect of GF-4 satellite. In Proceedings of the 3rd International Symposium of Space Optical Instruments and Applications, Beijing, China, 26–29 June 2016. [Google Scholar]
- Zhang, Z.X.; Shao, Y.; Tian, W.; Wei, Q.F.; Zhang, Y.Z.; Zhang, Q.J. Application Potential of GF-4 Images for Dynamic Ship Monitoring. IEEE Geosci. Remote Sens. Lett. 2017, 14, 911–915. [Google Scholar] [CrossRef]
- Etaya, M.; Sakata, T.; Shimoda, H.; Matsumae, Y. An experiment on detecting moving objects using a single scene of QuickBird data. J. Remote Sens. Soc. Jpn. 2004, 24, 357–366. [Google Scholar]
- Pesaresi, M.; Gutjahr, K.H.; Pagot, E. Estimating the velocity and direction of moving targets using a single optical VHR satellite sensor image. Int. J. Remote Sens. 2008, 29, 1221–1228. [Google Scholar] [CrossRef]
- Xiong, Z.; Zhang, Y. An initial study on vehicle information extraction from single pass of satellite QuickBird imagery. Photogramm. Eng. Remote Sens. 2008, 74, 1401–1411. [Google Scholar] [CrossRef]
- Easson, G.; DeLozier, S.; Momm, H.G. Estimating speed and direction of small dynamic targets through optical satellite imaging. Remote Sens. 2010, 2, 1331–1347. [Google Scholar] [CrossRef]
- Bar, D.E.; Raboy, S. Moving car detection and spectral restoration in a single satellite WorldView-2 imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2077–2087. [Google Scholar] [CrossRef]
- Gao, F.; Li, B.; Xu, Q.Z.; Zhong, C. Moving vehicle information extraction from single-pass WorldView-2 imagery based on ERGAS-SNS analysis. Remote Sens. 2014, 6, 6500–6523. [Google Scholar] [CrossRef]
- Salehi, B.; Zhang, Y.; Zhong, M. Automatic moving vehicles information extraction from single-pass WorldView-2 imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 135–145. [Google Scholar] [CrossRef]
- Zhao, S.H.; Yin, D.; Dou, X.H.; Guo, L. Moving target information extraction based on single satellite image. Acta Geod. Cartogr. Sin. 2015, 44, 316–322. [Google Scholar]
- Meng, L.F.; Kerekes, P.J. Object tracking using high resolution satellite imagery. J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 146–152. [Google Scholar] [CrossRef]
- Sarabjit, K.; Sukhjinder, K. Enhanced target tracking based on mean shift algorithm for satellite imagery. Int. J. Res. Eng. Technol. 2013, 2, 469–477. [Google Scholar]
- Kääb, A.; Leprince, S. Motion detection using near-simultaneous satellite acquisitions. Remote Sens. Environ. 2014, 154, 164–179. [Google Scholar] [CrossRef] [Green Version]
- Charalambous, E.; Takaku, J.; Michalis, P.; Dowman, I.; Charalampopoulou, V. Automated Motion Detection from Space in Sea Surveillance. In Proceedings of the Third International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2015), Paphos, Cyprus, 16–19 June 2015. [Google Scholar] [CrossRef]
- Kopsiaftis, G.; Karantzalos, K. Vehicle detection and traffic density monitoring from very high resolution satellite video data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Yang, T.; Wang, X.W.; Yao, B.W.; Li, J.; Zhang, Y.N.; He, Z.N.; Duan, W.C. Small moving vehicle detection in satellite video of an urban area. Sensors 2016, 16, 1528–1543. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.B.; Zhang, T.; Guo, L.H.; He, X.J. Moving objects detection on satellite video. Chin. J. Liquid Cryst. Disp. 2017, 32, 138–143. [Google Scholar]
- Wu, J.Q.; Zhang, G.; Wang, T.Y.; Jiang, Y.H. Satellite video point-target tracking in combination with motion smoothness constraint and grayscale feature. Acta Geod. Cartogr. Sin. 2017, 46, 1135–1146. [Google Scholar]
- Li, X.B.; Sun, W.F.; Li, L. Ocean moving ship detection method for remote sensing satellite in geostationary orbit. J. Electron. Inf. Technol. 2015, 37, 1862–1867. [Google Scholar]
- Yao, L.B.; Liu, Y.; Wu, Y.Z.; Xiong, W.; Zhou, Z.M. Ship Tracking based on GF-4 Geostationary Optical Satellite. In Proceedings of the Fourth High Resolution Earth Observation Conference of China, Wuhan, China, 17–18 September 2017. [Google Scholar]
- Liu, Y.; Yao, L.B.; Xiong, W.; Jin, T.; Zhou, Z.M. Ship target tracking based on low-resolution optical satellite in geostationary orbit. Int. J. Remote Sens. 2018, 39, 2991–3009. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frame | Acquisition Time (UTC) | Weather and Sea Conditions | |
|---|---|---|---|
| Wind Scale | Sea State Scale | ||
| 1 | 2017-03-09 03:47:24 | 3~4 | 2~3 |
| 2 | 2017-03-09 03:50:30 | ||
| 3 | 2017-03-09 03:53:36 | ||
| 4 | 2017-03-09 03:56:42 | ||
| 5 | 2017-03-09 03:59:47 | ||
| ROI | Before Tracking | After Tracking (Only Position) | After Tracking (Position + Amplitude) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Precision | Recall | F-Score | Precision | Recall | F-Score | Precision | Recall | F-Score | |
| 1 | 26.6% | 79.6% | 39.9% | 93.0% | 75.5% | 83.3% | 97.6% | 77.3% | 86.3% |
| 2 | 74.5% | 94.1% | 83.2% | 97.8% | 91.8% | 94.7% | 99.0% | 92.9% | 95.9% |
| Total | 47.6% | 89.0% | 62.0% | 96.3% | 86.1% | 90.9% | 98.5% | 87.4% | 92.6% |
| ROI | Before Position Correction | After Position Correction | ||||
|---|---|---|---|---|---|---|
| Location Error (m) | Speed Error (kn) | Course Error (°) | Location Error (m) | Speed Error (kn) | Course Error (°) | |
| 1 | 1804.7 | 0.7 | 6.3 | 123.9 | 0.2 | 3.0 |
| 2 | 4613.9 | 1.1 | 3.7 | 77.4 | 0.3 | 2.3 |
| Total | 3816.7 | 1.0 | 4.4 | 89.8 | 0.3 | 2.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, L.; Liu, Y.; He, Y. A Novel Ship-Tracking Method for GF-4 Satellite Sequential Images. Sensors 2018, 18, 2007. https://doi.org/10.3390/s18072007
Yao L, Liu Y, He Y. A Novel Ship-Tracking Method for GF-4 Satellite Sequential Images. Sensors. 2018; 18(7):2007. https://doi.org/10.3390/s18072007
Chicago/Turabian StyleYao, Libo, Yong Liu, and You He. 2018. "A Novel Ship-Tracking Method for GF-4 Satellite Sequential Images" Sensors 18, no. 7: 2007. https://doi.org/10.3390/s18072007
APA StyleYao, L., Liu, Y., & He, Y. (2018). A Novel Ship-Tracking Method for GF-4 Satellite Sequential Images. Sensors, 18(7), 2007. https://doi.org/10.3390/s18072007