Compressive Sensing Based Multilevel Fast Multipole Acceleration for Fast Scattering Center Extraction and ISAR Imaging

Abstract
:1. Introduction
2. Compressive Sensing
3. Implementation of CS in MLFMA
3.1. MLFMA
3.2. CS-MLFMA
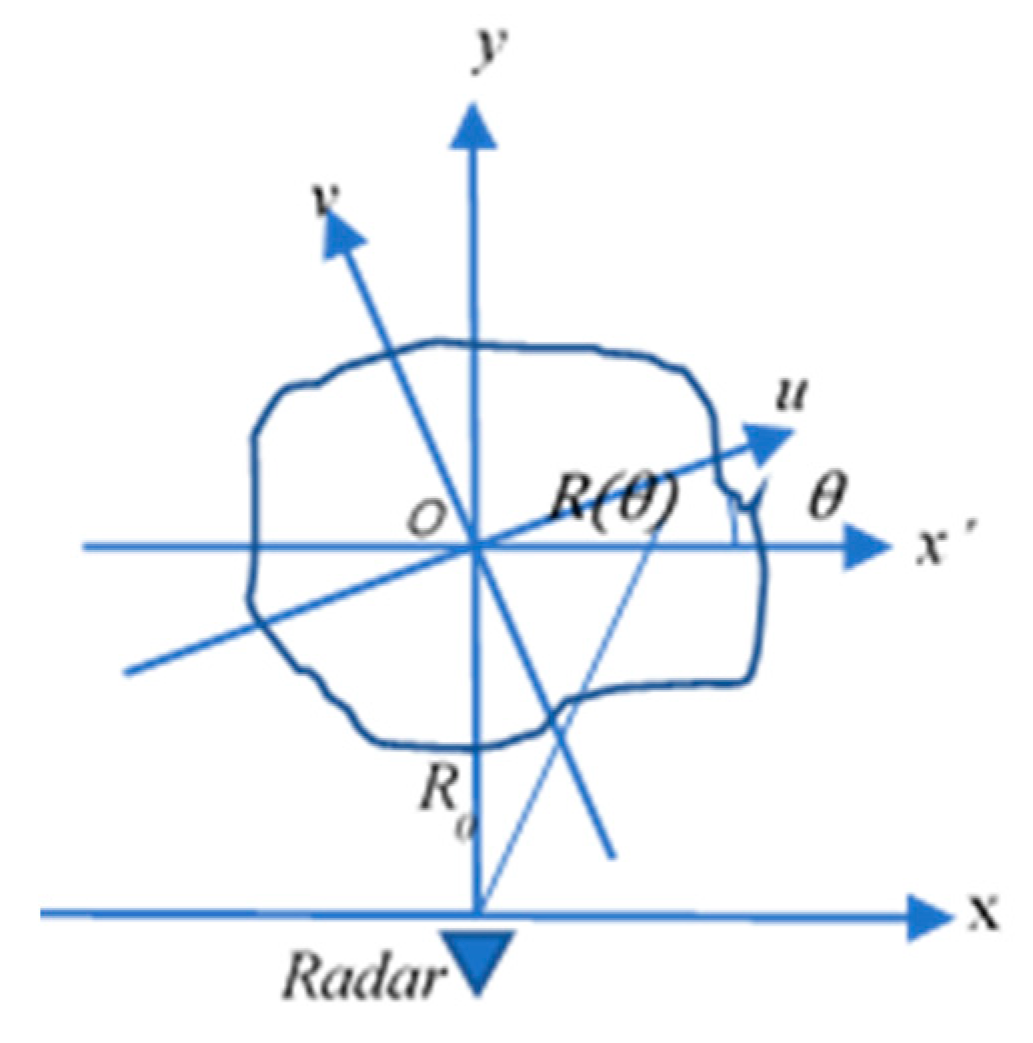
3.3. ISAR Imaging by CS-MLFMA
4. Numerical Examples
4.1. CS-MLFMA
4.2. ISAR Imaging by Using CS-MLMFA
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bao, Z.; Xing, M.D.; Wang, T. Radar Imaging Technology; Publishing House of Electronics Industry: Beijing, China, 2014. [Google Scholar]
- Son, J.S.; Thomas, G.; Flores, B.C. Range-Doppler Radar Imaging and Motion Compensation; Artech House Publisher: Norwood, MA, USA, 2001. [Google Scholar]
- Gu, X.; Zhang, Y.H.; Zhang, X.K. Electromagnetic simulation of ISAR Imaging with super- resolution. In Proceedings of the 1st Asian and Pacific Conference on Synthetic Aperture Radar, Huangshan, China, 5–9 November 2007. [Google Scholar]
- Li, S.; Zhu, B.; Sun, H. NUFFT-based near-field imaging technique for far-field radar cross section calculation. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 550–553. [Google Scholar] [CrossRef]
- Prakash, V.; Mittra, R. Characteristic basis function method: A new technique for efficient solution of method of moments matrix equation. Microw. Opt. Technol. Lett. 2003, 36, 95–100. [Google Scholar] [CrossRef]
- Wang, J.J.H. Generalized Moment Methods in Electromagnetics: Formulation and Solution of Integral Equations; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1991. [Google Scholar]
- Nedelec, J.C. Mixed finite element in R3. Numer. Math. 1980, 35, 315–341. [Google Scholar] [CrossRef]
- Harrington, R.F. Field Computational by Moment Methods; IEEE Press: New York, NY, USA, 1993. [Google Scholar]
- Song, J.M.; Lu, C.C.; Chew, W.C. Multilevel fast multipole algorithm for electromagnetic scattering by large complex objects. IEEE Trans. Antennas Propag. 1997, 45, 1488–1493. [Google Scholar] [CrossRef]
- Hu, J.; Nie, Z.P. Steepest descent-fast multipole algorithm for scattering from 3D planar conductor. Chin. J. Electron. 1998, 4, 404–406. [Google Scholar]
- Candes, E.J.; Wakin, M.B. A introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Candes, E.J. Compressive sampling. In Proceedings of International Congress of Mathematicians; European Mathematical Society Publishing House: Zürich, Switzerland; Madrid, Spain, 2006. [Google Scholar]
- Donoho, D.L. Compressed Sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Baraniuk, R.G. A lecture compressive sensing. IEEE Signal Process. Mag. 2007, 24, 118–121. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Tsaig, Y.; Donoho, D.L. Extensions of compressed sensing. Signal Process. 2006, 86, 549–571. [Google Scholar] [CrossRef]
- Cao, X.Y.; Chen, M.S.; Wu, X.L. Application of priori knowledge to solving problems of electromagnetic field by compressed sensing. Acta Electron. Sin. 2013, 41, 2361–2366. [Google Scholar]
- Qi, C.H.; Zhao, Z.Q.; Xu, J.; Zhang, H. Electromagnetic scattering and image processing of targets under complex environment based on compressive sensing method. High Power Laser Part. Beams 2014, 26, 163–168. [Google Scholar]
- Burkholder, R.J.; O’Donnell, A.N.; Coburn, W.O.; Reddy, C. Sparse basis expansions for compressive sensing of electromagnetic scattering patterns computed using iterative physical optics. In Proceedings of the International Conference on Electromagnetics in Advanced Applications (ICEAA), Cape Town, South Africa, 2–7 September 2012. [Google Scholar]
- Potter, L.C.; Ertin, E.; Parker, J.T.; Cetin, M. Sparsity and compressed sensing in radar imaging. Proc. IEEE 2010, 98, 1006–1020. [Google Scholar] [CrossRef]
- Baraniuk, R.; Steeghs, P. Compressive radar imaging. In Proceedings of the IEEE Radar Conference, Boston, MA, USA, 17–20 April 2007. [Google Scholar]
- Liu, J.H.; Xu, S.K.; Gao, X.Z.; Li, X.; Zhuang, Z.W. A review of radar imaging technique based on compressed sensing. Signal Process. 2011, 27, 251–260. [Google Scholar]
- Ender, J.H.G. On compressive sensing applied to radar. Signal Process. 2010, 90, 1402–1414. [Google Scholar] [CrossRef]
- Zhang, L.; Qiao, Z.-J.; Xing, M.; Li, Y.; Bao, Z. High-resolution ISAR imaging with sparse stepped-frequency waveforms. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4630–4651. [Google Scholar] [CrossRef]
- Zhang, L.; Qiao, Z.-J.; Xing, M.-D.; Sheng, J.-L.; Guo, R.; Bao, Z. High-resolution ISAR imaging by exploiting sparse apertures. IEEE Trans. Antennas Propag. 2012, 60, 997–1008. [Google Scholar] [CrossRef]
- Ota, K.; Dong, M.X.; Gui, J.S.; Liu, A.F. QUOIN: Incentive mechanisms for crowd sensing networks. IEEE Netw. 2018, 32, 114–119. [Google Scholar] [CrossRef]
- Li, H.; Ota, K.; Dong, M.X. Learning IoT in edge: Deep learning for the internet-of-things with edge computing. IEEE Netw. 2018, 32, 96–101. [Google Scholar] [CrossRef]
- Tao, X.Y.; Ota, K.; Dong, M.X.; Qi, H.; Li, K.Q. Performance guaranteed computation offloading for mobile-edge cloud computing. IEEE Wirel. Commun. Lett. 2017, 6, 774–777. [Google Scholar] [CrossRef]
- Li, L.Z.; Ota, K.; Dong, M.X.; Borjigin, W.Y.Z.L. Eyes in the dark: Distributed Scene understanding for disaster management. IEEE Trans. Parallel Distrib. Syst. 2017, 28, 3458–3471. [Google Scholar] [CrossRef]
- Tao, M.; Ota, K.; Dong, M.X. Foud: Integrating fog and cloud for 5G-Enabled V2G networks. IEEE Netw. 2017, 31, 8–13. [Google Scholar] [CrossRef]
- Zou, J.; Gilbert, A.; Strauss, M.; Daubechies, I. Theoretical and experimental analysis of a randomized algorithm for sparse Fourier transform analysis. J. Comput. Phys. 2006, 211, 572–595. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Baraniuk, R.G.; Davenport, M.; DeVore, R.; Wakin, M. A simple proof of the restricted isometry property for random matrices. Constr. Approx. 2008, 28, 253–263. [Google Scholar] [CrossRef]
- He, X.; Hu, J.; Nie, Z.P. Application of Combination of Excitations and Compressed Sensing for Fast Computation of Monostatic Scattering. In Proceedings of the Cross Strait Quad-Regional Radio Science and Wireless Technology Conference, Chengdu, China, 21–25 July 2013. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | MLFMA | CS-MLFMA | |
|---|---|---|---|
| Incident Angle | 181 | 50 | |
| Time (min) | Iterative Inverse | 7 | 3 |
| Reconstruction | 0 | 2.9 | |
| Total Time | 8 | 6.9 | |
| Improvement | 13.75% | ||
| Algorithm | MLFMA | CS-MLFMA | |
|---|---|---|---|
| Incident Angle | 181 | 90 | |
| Time (min) | Iterative Inverse | 2.8 | 2.1 |
| Reconstruction | 0 | 0.8 | |
| Total Time | 3.8 | 2.9 | |
| Improvement | 23.70% | ||
| Items | Values |
|---|---|
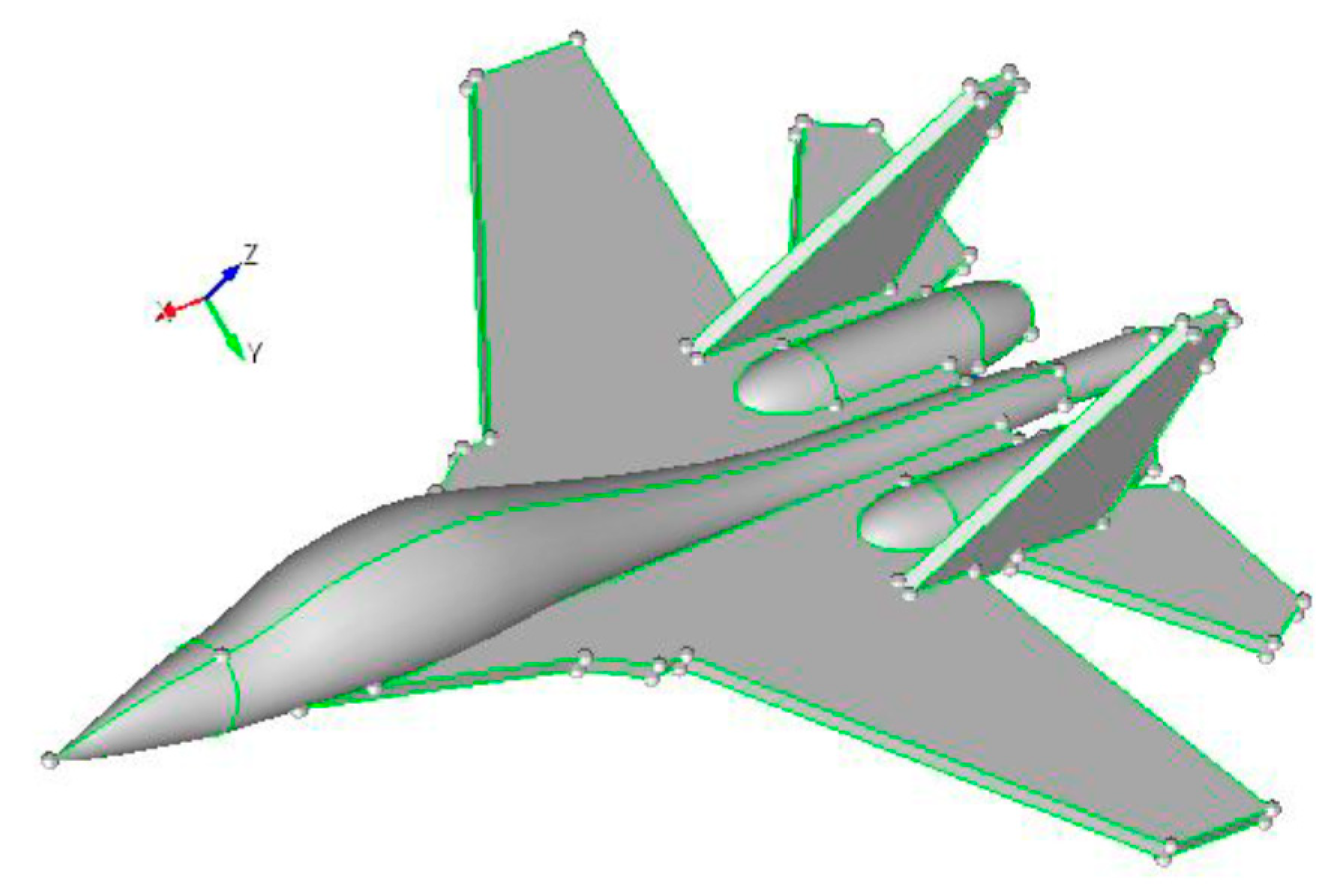
| Body Length in X-axis | 9 |
| Distance (the longest wings) in Y-axis | 6 |
| Aircraft Length in Z-axis | 2.4 |
| Initial Incident Angle | 74° |
| Angle Interval | 0.5° |
| Number of Incident Angle | 45 |
| Frequency Range | 300–1000 MHz |
| Frequency Interval | 15 MHz |
| Number of Incident Frequency | 65 |
| Freq./GHZ | Freq. Point | CS-MLFMA/min | MLFMA/min | Improvement |
|---|---|---|---|---|
| [0.3, 0.4) | 6 | 1.2 | 1.5 | 20% |
| [0.4, 0.5) | 7 | 1.75 | 2 | 12.50% |
| [0.5, 0.6) | 7 | 6.7 | 8 | 16.30% |
| [0.6, 0.7) | 6 | 8.3 | 10 | 17% |
| [0.7, 0.8) | 7 | 13 | 15 | 13.30% |
| [0.8, 0.9) | 7 | 17.5 | 20 | 12.50% |
| [0.9, 1.0) | 5 | 24.6 | 28 | 11.70% |
| Num. of Incident Angles | 45 | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Jiang, M.; He, X.; Hu, J. Compressive Sensing Based Multilevel Fast Multipole Acceleration for Fast Scattering Center Extraction and ISAR Imaging. Sensors 2018, 18, 2024. https://doi.org/10.3390/s18072024
Zhu W, Jiang M, He X, Hu J. Compressive Sensing Based Multilevel Fast Multipole Acceleration for Fast Scattering Center Extraction and ISAR Imaging. Sensors. 2018; 18(7):2024. https://doi.org/10.3390/s18072024
Chicago/Turabian StyleZhu, Wei, Ming Jiang, Xin He, and Jun Hu. 2018. "Compressive Sensing Based Multilevel Fast Multipole Acceleration for Fast Scattering Center Extraction and ISAR Imaging" Sensors 18, no. 7: 2024. https://doi.org/10.3390/s18072024
APA StyleZhu, W., Jiang, M., He, X., & Hu, J. (2018). Compressive Sensing Based Multilevel Fast Multipole Acceleration for Fast Scattering Center Extraction and ISAR Imaging. Sensors, 18(7), 2024. https://doi.org/10.3390/s18072024