Fast Visual Odometry for a Low-Cost Underwater Embedded Stereo System †

 , , ,
, , ,
Abstract
:1. Introduction
2. Related Works
2.1. Feature Point Matching
2.2. Ego-Motion Estimation
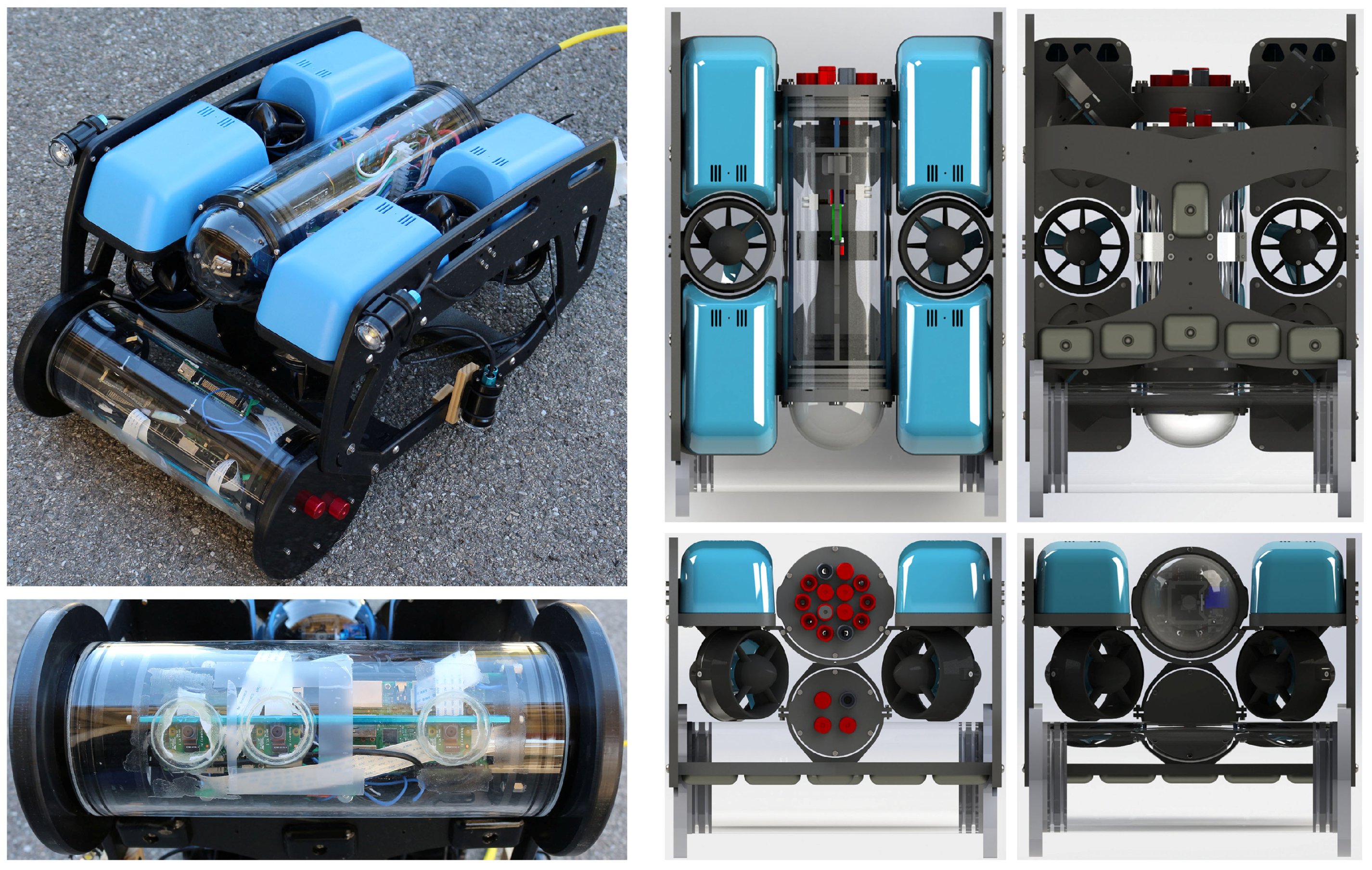
3. Hardware Platform
3.1. ROV-Attached Trifocal System
3.2. Handheld Stereo System
4. Image Acquisition and Quality Estimation
- * is a convolution operator.
5. Visual Odometry
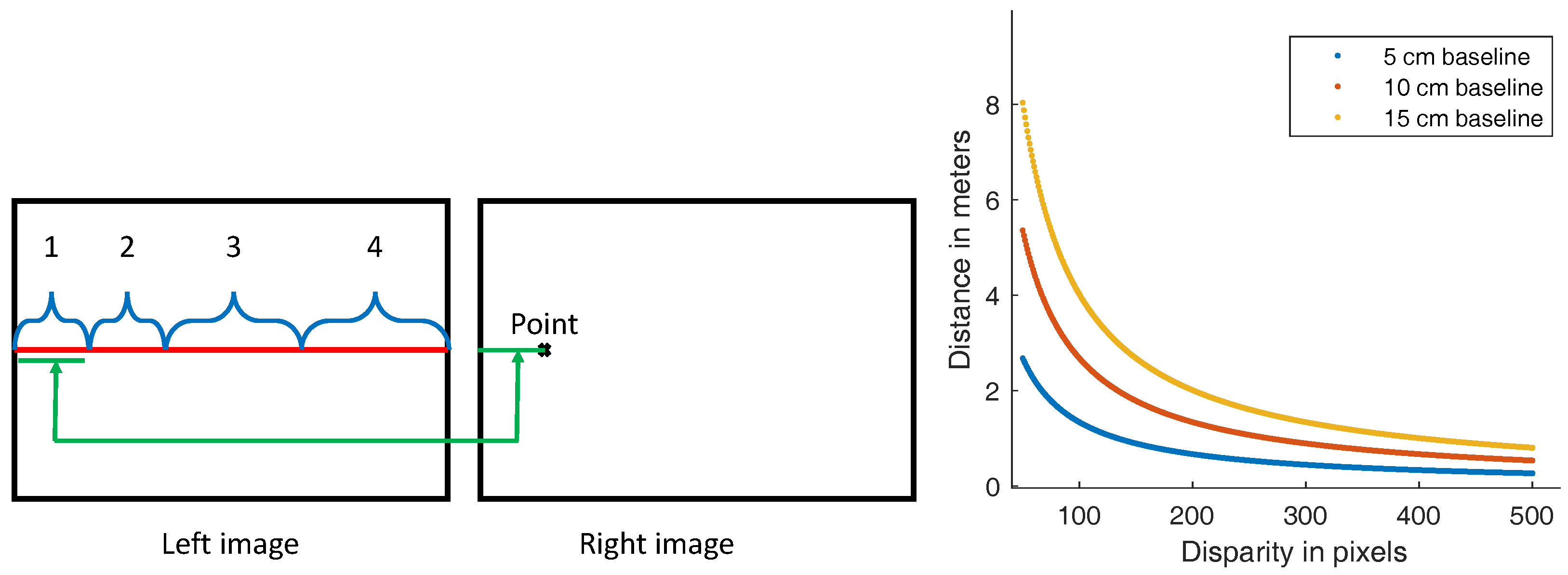
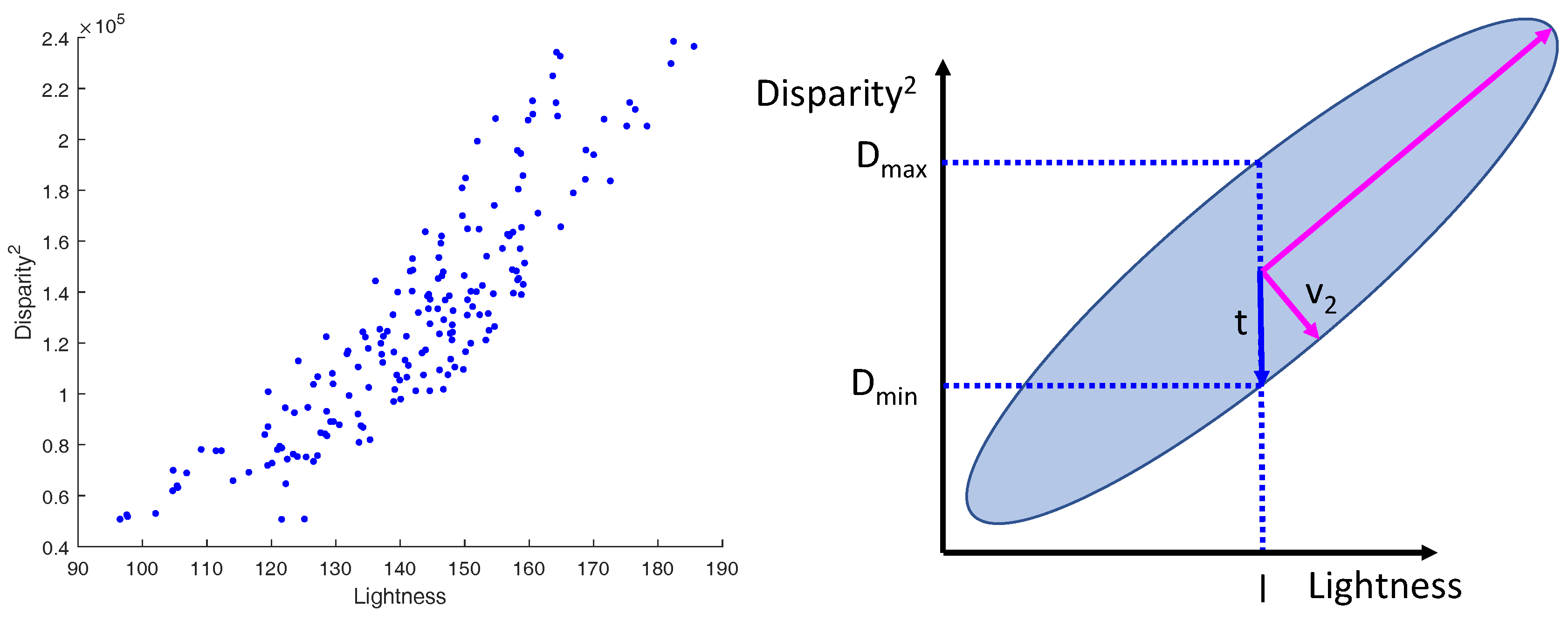
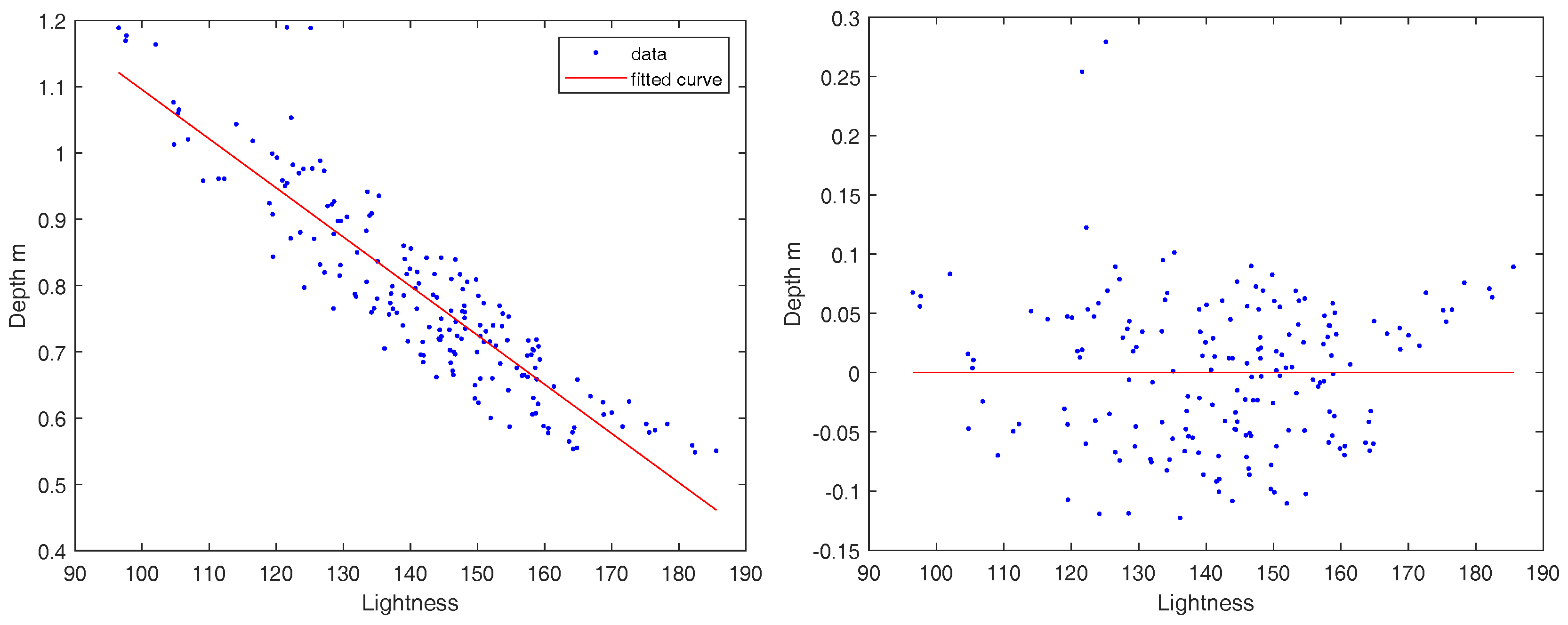
5.1. Speeded Up Stereo Matching
5.2. Initial Ego-Motion Estimation
- Feature point detection of using the Harris-based Shi–Tomasi method [26].
- Perform feature point matching using the patch descriptor (, as advised in [8]), and the normalized sum of squared differences as a distance measure for the frames (, ). Given the camera calibration parameters, the search range across the epipolar lines is reduced using the analysis presented in Section 5.1.
- The feature points detected in are tracked in using the Pyramidal Lucas–Kanade (LK) method [54].
- The fundamental matrix is computed for the frames (, ) using the normalized eight point method with RANSAC as described in [43]. The matrix is used to reject the tracking outliers. This step is optional—although it improves the accuracy slightly, more computation time adds up.
- Repeat Step 2 for frames (, ) using the tracked feature points found in Step 3.
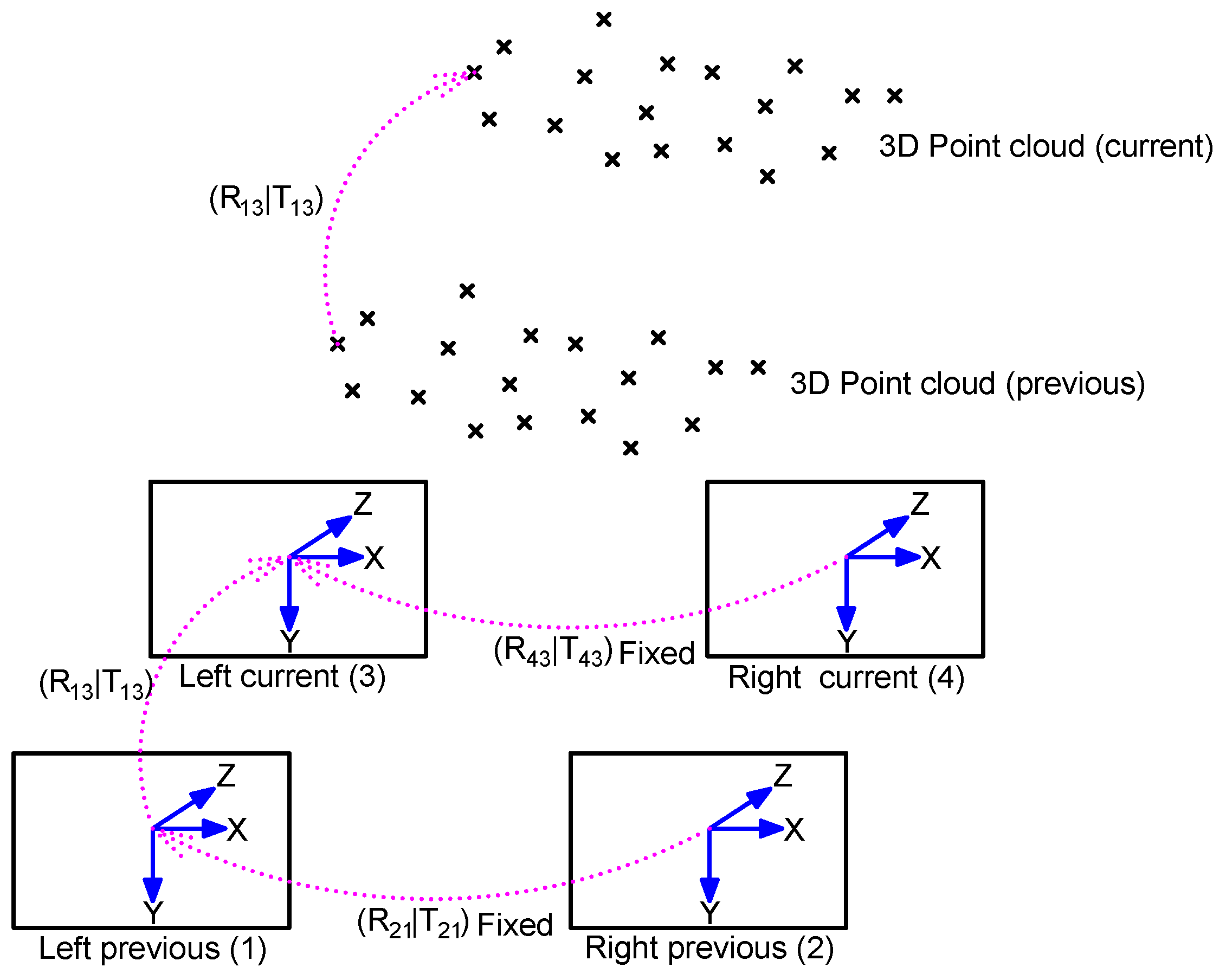
- Compute two 3D point clouds using triangulation for the matched feature points in frames (, ) and (, ) respectively. We note that the correspondence between the two point clouds is known.
- Compute the relative transformation between the two 3D point clouds, which represents the ego-motion that the ROV undergoes (to be explained in the following text).
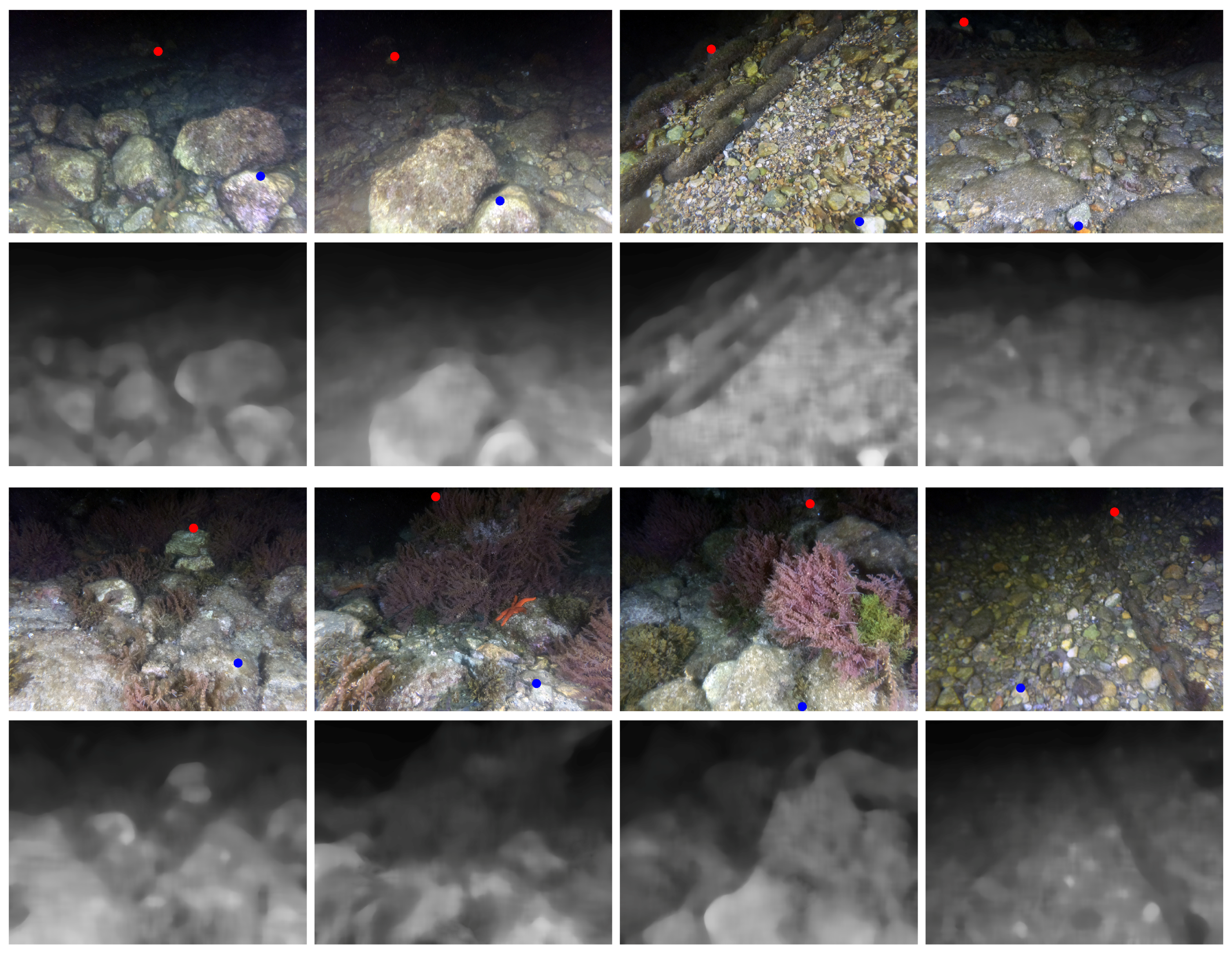
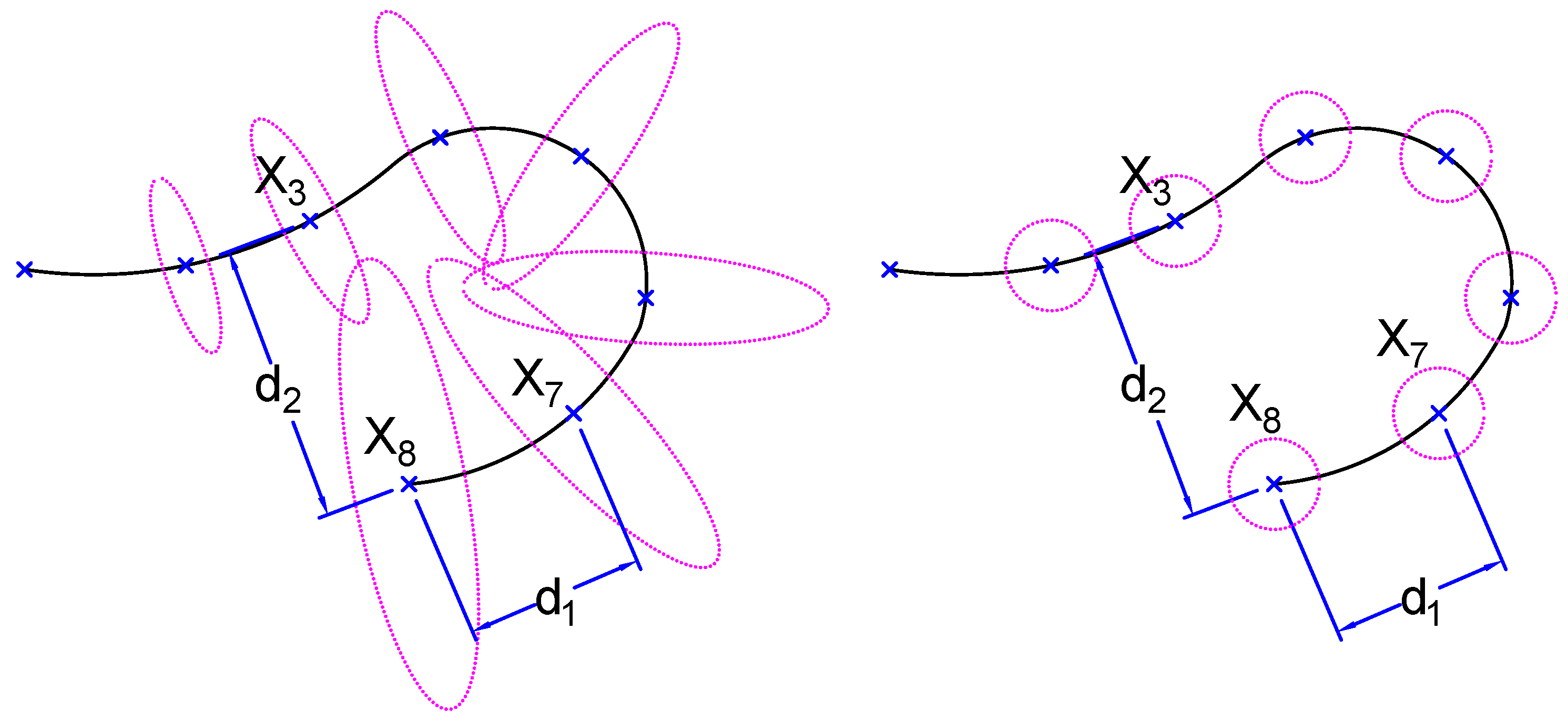
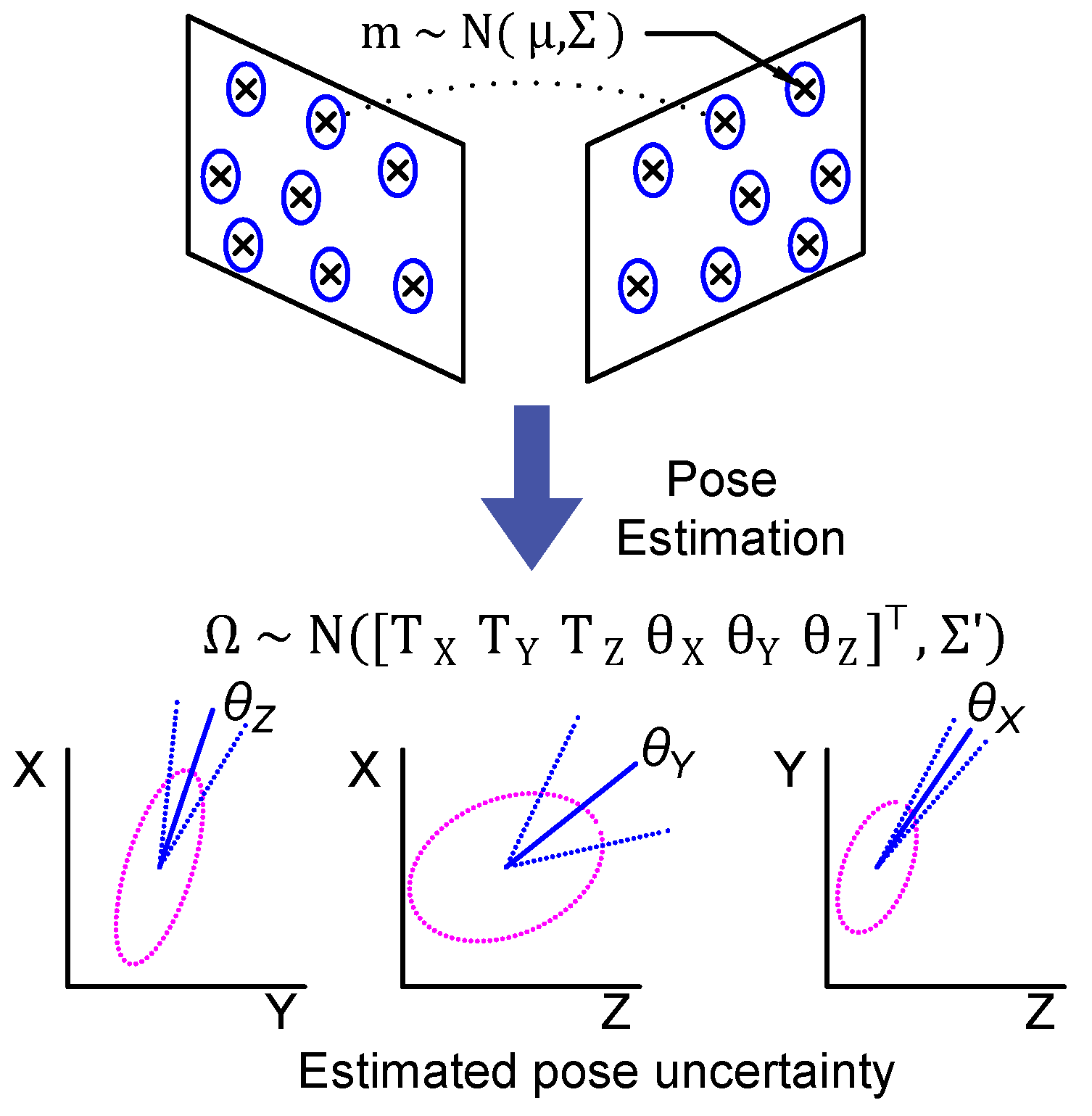
5.3. Uncertainty in Visual Odometery
5.4. Pose Uncertainty Modeling and Learning
5.5. Semi-Global Bundle Adjustment
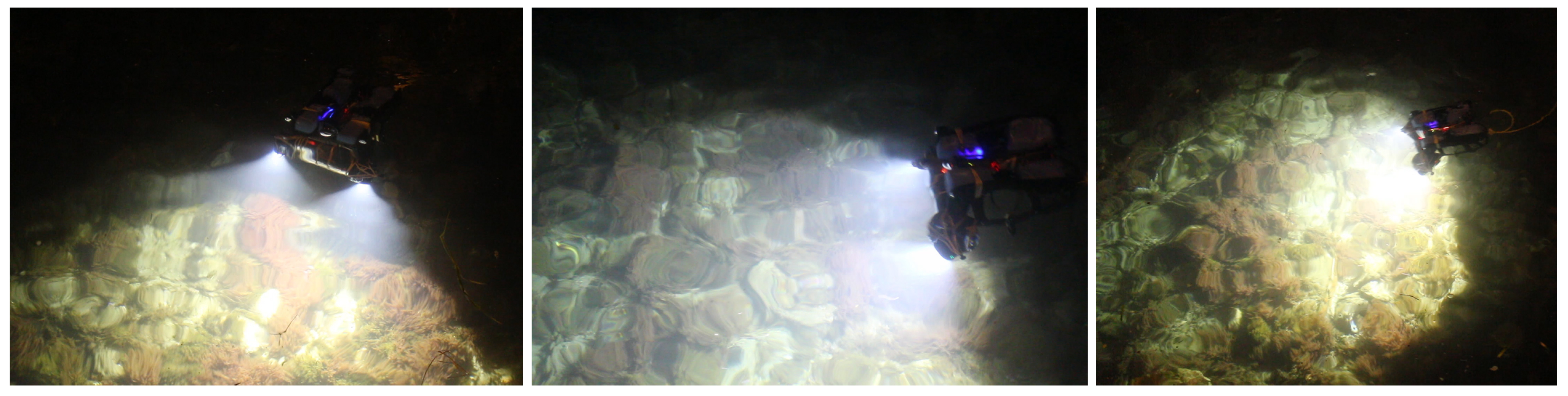
6. Experimental Results
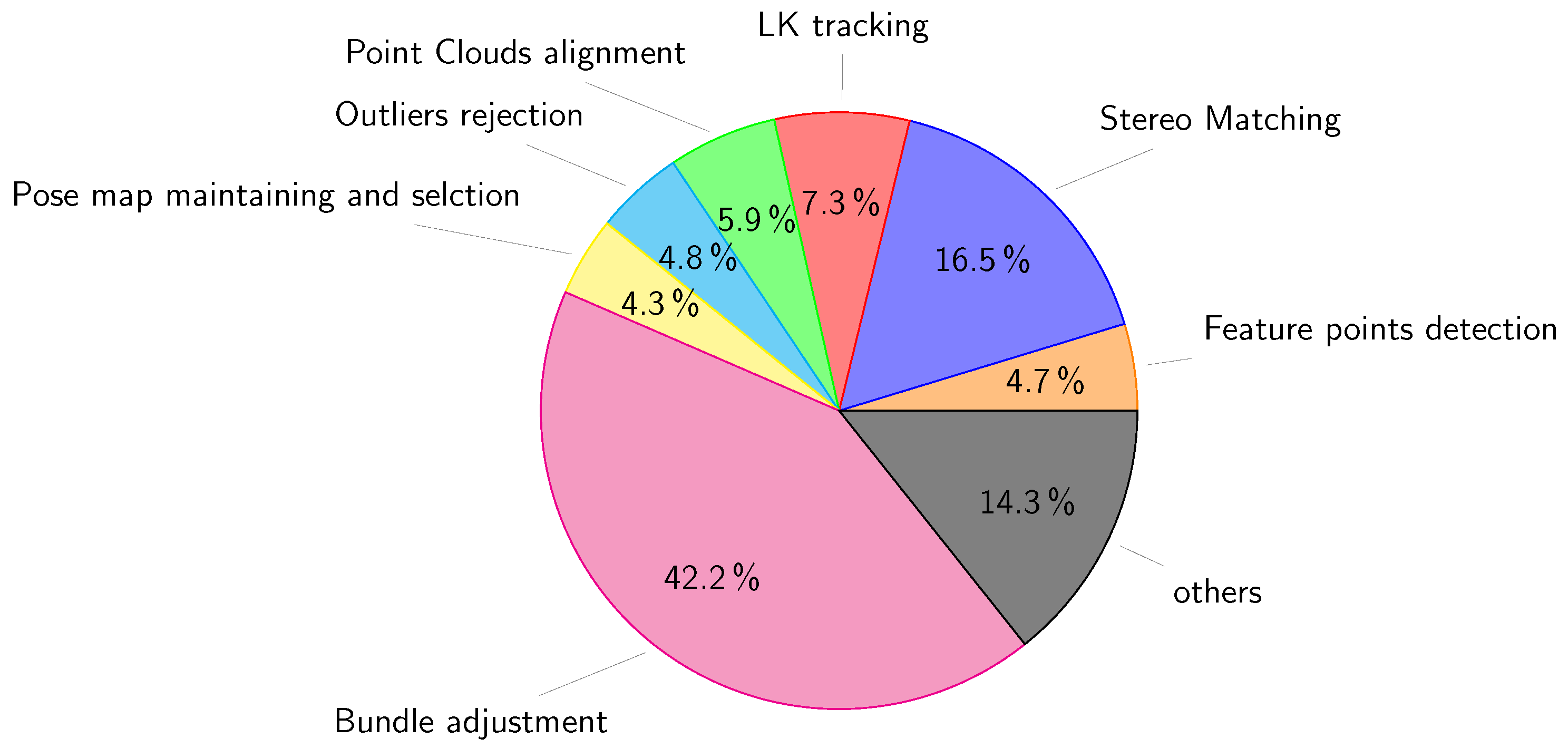
6.1. Runtime Evaluation
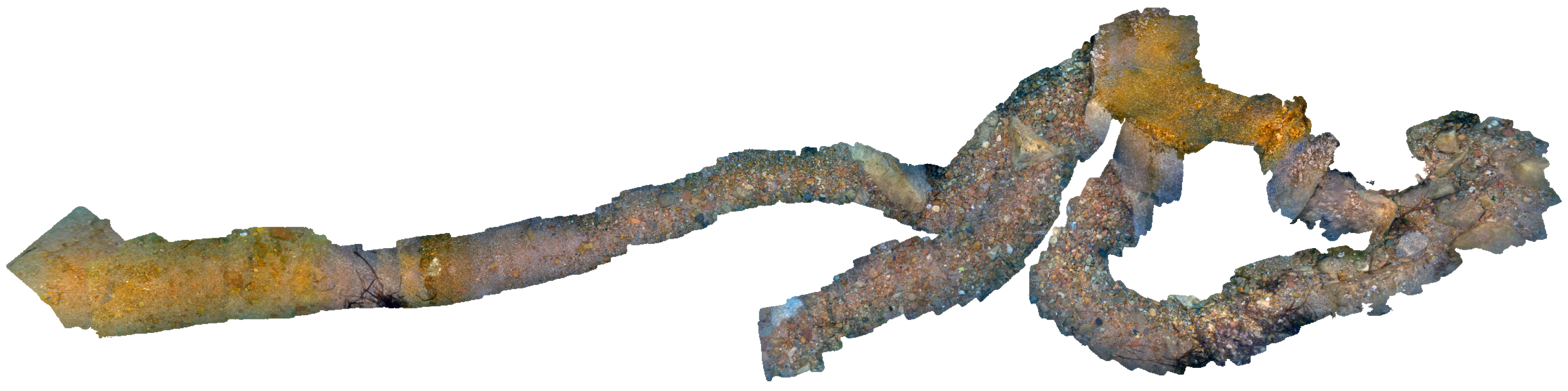
6.2. Visual Odometry Evaluation
7. Conclusions and Perspectives
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ROV | Remotely Operated underwater Vehicle |
| ARM | Advanced RISC Machine |
| GPS | Global Positioning System |
| DVL | Doppler Velocity Logs |
| 3D | Three Dimensional |
| GPU | Graphics Processing Unit |
| DOF | Degree Of Freedom |
| BA | Bundle Adjustment |
| SLAM | Simultaneous Localization And Mapping |
| RANSAC | RANdom SAmple Consensus |
| RGB-D | Red Green Blue Depth |
| RPi | Raspberry Pi |
| INU | Inertial Navigation Unit |
| SONAR | SOund Navigation And Ranging |
| SSS | Side Scan Sonar |
| SVD | Singular Value Decomposition |
| CPU | Central Processing Unit |
| PSD | Positive Semi-Definitive |
References
- Drap, P. Underwater Photogrammetry for Archaeology; INTECH Open Access Publisher: Vienna, Austria, 2012. [Google Scholar]
- BlueRobotics. 2018. Available online: https://www.bluerobotics.com (accessed on 1 July 2018).
- Itseez. Open Source Computer Vision Library. 2018. Available online: https://github.com/itseez/opencv (accessed on 1 July 2018).
- Stone, J.E.; Gohara, D.; Shi, G. OpenCL: A Parallel Programming Standard for Heterogeneous Computing Systems. Comput. Sci. Eng. 2010, 12, 66–73. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Triggs, B.; McLauchlan, P.; Hartley, R.; Fitzgibbon, A. Bundle adjustment: A modern synthesis. In Vision Algorithms: Theory and Practice; Springer: Berlin/Heidelberg, Germany, 2000; pp. 153–177. [Google Scholar]
- Lowe, D. Distinctive image features from scale-invariant keypoints. In. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In Proceedings of the European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 404–417. [Google Scholar]
- Gauglitz, S.; Höllerer, T.; Turk, M. Evaluation of interest point detectors and feature descriptors for visual tracking. Int. J. Comput. Vis. 2011, 94, 335–360. [Google Scholar] [CrossRef]
- Bellavia, F.; Fanfani, M.; Colombo, C. Selective visual odometry for accurate AUV localization. Autono. Robot. 2017, 41, 133–143. [Google Scholar] [CrossRef]
- Mouragnon, E.; Lhuillier, M.; Dhome, M.; Dekeyser, F.; Sayd, P. Generic and real-time structure from motion using local bundle adjustment. Image Vis. Comput. 2009, 27, 1178–1193. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Montemerlo, M.; Thrun, S. FastSLAM: A Scalable Method for the Simultaneous Localization and Mapping Problem in Robotics; Springer: Berlin, Germany, 2007. [Google Scholar]
- Estrada, C.; Neira, J.; Tardós, J.D. Hierarchical SLAM: Real-time accurate mapping of large environments. IEEE Trans. Robot. 2005, 21, 588–596. [Google Scholar] [CrossRef]
- Clemente, L.A.; Davison, A.J.; Reid, I.D.; Neira, J.; Tardós, J.D. Mapping Large Loops with a Single Hand-Held Camera. In Proceedings of the Robotics: Science and Systems III, Atlanta, GA, USA, 27–30 June 2007. [Google Scholar]
- Nawaf, M.M.; Boï, J.M.; Merad, D.; Royer, J.P.; Drap, P. Low Cost Embedded Stereo System for Underwater Surveys. In Proceedings of the 5th International Workshop LowCost 3D—Sensors, Algorithms, Applications, Hamburg, Germany, 28–29 November 2017; pp. 179–186. [Google Scholar]
- Nawaf, M.M.; Drap, P.; Royer, J.P.; Merad, D.; Saccone, M. Towards Guided Underwater Survey Using Light Visual Odometry. In Proceedings of the 7th ISPRS/CIPA 3D Virtual Reconstruction and Visualization of Complex Architectures, Nafplio, Greece, 1–3 March 2017; pp. 527–533. [Google Scholar]
- Se, S.; Lowe, D.; Little, J. Mobile robot localization and mapping with uncertainty using scale-invariant visual landmarks. Int. J. Robot. Res. 2002, 21, 735–758. [Google Scholar] [CrossRef]
- Nistér, D.; Naroditsky, O.; Bergen, J. Visual odometry. In Proceedings of the 2004 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2004), Washington, DC, USA, 27 June–2 July 2004; p. I-652. [Google Scholar]
- Eade, E.; Drummond, T. Scalable monocular SLAM. In Proceedings of the 2006 IEEE Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; Volume 1, pp. 469–476. [Google Scholar]
- Williams, B.; Klein, G.; Reid, I. Real-time SLAM relocalisation. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- Chekhlov, D.; Pupilli, M.; Mayol, W.; Calway, A. Robust real-time visual SLAM using scale prediction and exemplar based feature description. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition (CVPR’07), Minneapolis, MN, USA, 18–23 June 2007; pp. 1–7. [Google Scholar]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time single camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Klein, G.; Murray, D. Improving the agility of keyframe-based SLAM. In Proceedings of the European Conference on Computer Vision, Marseille, France, 12–18 October 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 802–815. [Google Scholar]
- Bourmaud, G.; Megret, R. Robust large scale monocular visual SLAM. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1638–1647. [Google Scholar]
- Rosten, E.; Drummond, T. Fusing points and lines for high performance tracking. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV’05), Beijing, China, 17–21 October 2005; Volume 2, pp. 1508–1515. [Google Scholar]
- Shi, J.; Tomasi, C. Good features to track. In Proceedings of the 1994 IEEE Conference on Computer Vision and Pattern Recognition (CVPR’94), Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Nawaf, M.M.; Trémeau, A. Monocular 3D structure estimation for urban scenes. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 3763–3767. [Google Scholar]
- Negre, P.L.; Bonin-Font, F.; Oliver, G. Cluster-based loop closing detection for underwater slam in feature-poor regions. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2589–2595. [Google Scholar]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. Brief: Binary robust independent elementary features. In Proceedings of the European Conference on Computer Vision, Heraklion, Greece, 5–11 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 778–792. [Google Scholar]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary robust invariant scalable keypoints. In Proceedings of the 11th IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. [Google Scholar]
- Mair, E.; Hager, G.D.; Burschka, D.; Suppa, M.; Hirzinger, G. Adaptive and Generic Corner Detection Based on the Accelerated Segment Test. In Proceedings of the European Conference on Computer Vision (ECCV’10), Heraklion, Greece, 5–11 September 2010; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Yamaguchi, K.; McAllester, D.; Urtasun, R. Robust Monocular Epipolar Flow Estimation. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; IEEE Computer Society: Washington, DC, USA, 2013; pp. 1862–1869. [Google Scholar] [Green Version]
- Geiger, A.; Ziegler, J.; Stiller, C. Stereoscan: Dense 3D reconstruction in real-time. In Proceedings of the IEEE Intelligent Vehicles Symposium, Baden-Baden, Germany, 5–9 June 2011; pp. 963–968. [Google Scholar]
- Davison, A.J. Real-time simultaneous localisation and mapping with a single camera. In Proceedings of the Ninth IEEE International Conference on Computer Vision Computer Vision, Nice, France, 13–16 October 2003; pp. 1403–1410. [Google Scholar]
- Kerl, C.; Sturm, J.; Cremers, D. Dense visual SLAM for RGB-D cameras. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 Novermber 2013; pp. 2100–2106. [Google Scholar]
- Comport, A.I.; Malis, E.; Rives, P. Accurate quadrifocal tracking for robust 3D visual odometry. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 40–45. [Google Scholar]
- Stühmer, J.; Gumhold, S.; Cremers, D. Real-time dense geometry from a handheld camera. In Joint Pattern Recognition Symposium; Springer: Berlin/Heidelberg, Germany, 2010; pp. 11–20. [Google Scholar]
- Pizzoli, M.; Forster, C.; Scaramuzza, D. REMODE: Probabilistic, monocular dense reconstruction in real time. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2609–2616. [Google Scholar]
- Blanco, J.L.; Fernandez-Madrigal, J.A.; González, J. A novel measure of uncertainty for mobile robot slam with rao-blackwellized particle filters. Int. J. Robot. Res. 2008, 27, 73–89. [Google Scholar] [CrossRef]
- Eade, E.; Drummond, T. Unified Loop Closing and Recovery for Real Time Monocular SLAM. BMVC 2008, 13, 136. [Google Scholar]
- Piniés, P.; Tardós, J.D. Scalable SLAM building conditionally independent local maps. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2007), San Diego, CA, USA, 29 October–2 November 2017; pp. 3466–3471. [Google Scholar]
- Montiel, J.; Civera, J.; Davison, A.J. Unified inverse depth parametrization for monocular SLAM. Analysis 2006, 9, 1. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Lourakis, M.I.; Argyros, A.A. SBA: A software package for generic sparse bundle adjustment. ACM Trans. Mathe. Softw. 2009, 36, 2. [Google Scholar] [CrossRef]
- Sibley, D.; Mei, C.; Reid, I.; Newman, P. Adaptive relative bundle adjustment. Robot. Sci. Syst. 2009, 32, 33. [Google Scholar]
- Ribas, D.; Ridao, P.; Tardós, J.D.; Neira, J. Underwater SLAM in a marina environment. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2007), San Diego, CA, USA, 29 October–2 November 2007; pp. 1455–1460. [Google Scholar]
- He, X.; Yuille, A. Occlusion boundary detection using pseudo-depth. In ECCV; Springer: Berlin/Heidelberg, Germany, 2010; pp. 539–552. [Google Scholar]
- Williams, S.; Mahon, I. Simultaneous localisation and mapping on the great barrier reef. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA ’04), New Orleans, LA, USA, 26 April–1 May 2004; Volume 2, pp. 1771–1776. [Google Scholar]
- Sáez, J.M.; Hogue, A.; Escolano, F.; Jenkin, M. Underwater 3D SLAM through entropy minimization. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA 2006), Orlando, FL, USA, 15–19 May 2006; pp. 3562–3567. [Google Scholar]
- Salvi, J.; Petillo, Y.; Thomas, S.; Aulinas, J. Visual slam for underwater vehicles using video velocity log and natural landmarks. In Proceedings of the IEEE OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–6. [Google Scholar]
- Weidner, N.; Rahman, S.; Li, A.Q.; Rekleitis, I. Underwater cave mapping using stereo vision. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5709–5715. [Google Scholar]
- Raspberry Pi Foundation. 2018. Available online: http://www.raspberrypi.org/ (accessed on 1 July 2018).
- Meier, L.; Tanskanen, P.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Pollefeys, M. PIXHAWK: A micro aerial vehicle design for autonomous flight using onboard computer vision. Auton. Robot. 2012, 33, 21–39. [Google Scholar] [CrossRef]
- Bouguet, J.Y. Pyramidal implementation of the affine lucas kanade feature tracker description of the algorithm. Intel Corp. 2001, 5, 4. [Google Scholar]
- Eggert, D.W.; Lorusso, A.; Fisher, R.B. Estimating 3-D rigid body transformations: A comparison of four major algorithms. Mach. Vis. Appl. 1997, 9, 272–290. [Google Scholar] [CrossRef]
- Strutz, T. Data Fitting and Uncertainty: A Practical Introduction to Weighted Least Squares and Beyond; Vieweg and Teubner: Wiesbaden, Geramny, 2010. [Google Scholar]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (AS-SPCC), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar] [Green Version]
- Bishop, C.M. Neural Networks for Pattern Recognition; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Demuth, H.B.; Beale, M.H.; De Jess, O.; Hagan, M.T. Neural Network Design; Martin Hagan: Stillwater, OK, USA, 2014. [Google Scholar]
- Comaniciu, D.; Ramesh, V.; Meer, P. Kernel-based object tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 564–577. [Google Scholar] [CrossRef] [Green Version]
- Agisoft PhotoScan. 2018. Available online: http://www.agisoft.com/ (accessed on 1 July 2018).
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Detector | Correct Matches (%) | Processing Time (ms) |
|---|---|---|---|
| Ours | Shi-Tomasi [26] | - | 220 |
| Stereo matching (no range reduction) | Shi-Tomasi [26] | - | 785 |
| SIFT | DoG | 49.5 | 752 |
| SURF | Fast Hessian | 48.7 | 486 |
| BRISK | AGAST [31] | 34.3 | 313 |
| Translation Error (%) | Rotation Error (deg/m) | |
|---|---|---|
| Ours (11 frames)—slow | 3.8 | 0.024 |
| Ours (5 frames) | 4.3 | 0.026 |
| Ours (3 frames) | 8.2 | 0.088 |
| EFK-SLAM [50] | 5.7 | 0.032 |
| Local (5 frames) | 8.4 | 0.079 |
| No BA | 16.1 | 0.137 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nawaf, M.M.; Merad, D.; Royer, J.-P.; Boï, J.-M.; Saccone, M.; Ben Ellefi, M.; Drap, P. Fast Visual Odometry for a Low-Cost Underwater Embedded Stereo System †. Sensors 2018, 18, 2313. https://doi.org/10.3390/s18072313
Nawaf MM, Merad D, Royer J-P, Boï J-M, Saccone M, Ben Ellefi M, Drap P. Fast Visual Odometry for a Low-Cost Underwater Embedded Stereo System †. Sensors. 2018; 18(7):2313. https://doi.org/10.3390/s18072313
Chicago/Turabian StyleNawaf, Mohamad Motasem, Djamal Merad, Jean-Philip Royer, Jean-Marc Boï, Mauro Saccone, Mohamed Ben Ellefi, and Pierre Drap. 2018. "Fast Visual Odometry for a Low-Cost Underwater Embedded Stereo System †" Sensors 18, no. 7: 2313. https://doi.org/10.3390/s18072313
APA StyleNawaf, M. M., Merad, D., Royer, J. -P., Boï, J. -M., Saccone, M., Ben Ellefi, M., & Drap, P. (2018). Fast Visual Odometry for a Low-Cost Underwater Embedded Stereo System †. Sensors, 18(7), 2313. https://doi.org/10.3390/s18072313