1. Introduction
Glass optical fibers (GOFs) are superior to polymer optical fibers (POFs) for data transmission applications because the lower attenuation and the higher bandwidth allow for higher bit rates and longer transmission distances. Therefore, POF is usually considered only for short-range data transmission [
1]. However, for sensing applications, the mentioned limitations of POFs are often not relevant. In fact, there are several advantages which make POFs attractive for sensing tasks. First of all, they are more flexible and robust than GOFs. Due to the large diameter of the core ( 1
) of a step-index polymer optical fiber (SI-POF) and the large numerical aperture (NA), the fiber can be excited with an LED, and the fiber tolerates vibrations and smaller displacements or misalignments. Furthermore, an SI-POF and the required components are competitively priced, which offers the possibility of a low-cost sensor design. As a result, several POF-based sensor schemes have been developed for a variety of different applications [
2].
A rather simple yet versatile approach is the monitoring of the intensity of the light transmitted by a POF. It has been adopted to measure transversal force [
3], liquid levels and the concentration of glycerine solutions [
4], as well as vibrations [
5]. When the fiber is exposed to constant stress, temperature changes can also be measured with this method [
6]. While the evanescent field of a large-core POF is not as strong as that of a single-mode GOF (SM-GOF), its power is sufficient to allow the measurement of moisture [
7] and organic gas [
8], for example.
POF-based sensors have also been proposed for medical and healthcare applications. The detection of bacteria and other living cells has been demonstrated using POF taper sensors [
9]. Another example from this field is the measurement of the particle concentration in water systems based on the light coupling between two POFs to determine the water quality [
10].
A technique well known from GOF sensors is the inscription of fiber Bragg gratings (FBGs). FBGs have also successfully been inscribed in POFs, and sensor schemes for the measurement of humidity and temperature [
11] as well as strain [
12] have been proposed based on this approach. A drawback of the strain sensing using FBGs is the requirement of a complex and expensive measurement setup. However, with structural health monitoring (SHM) gaining more attention, a simple and robust strain measurement technique is desirable. Kiesel et al. investigated the sensitivity of the phase of an electromagnetic wave propagating in a single-mode polymer optical fiber (SM-POF) to strain, and found the initial Young’s modulus to be independent from the strain for strains up to ≈1% [
13]. Furthermore, SM-POFs have been proven to endure strain as large as 6% before failure [
14] while showing a larger strain responsivity than GOFs [
15]. Unfortunately, to the best of our knowledge, there are currently no commercially available SM-POFs.
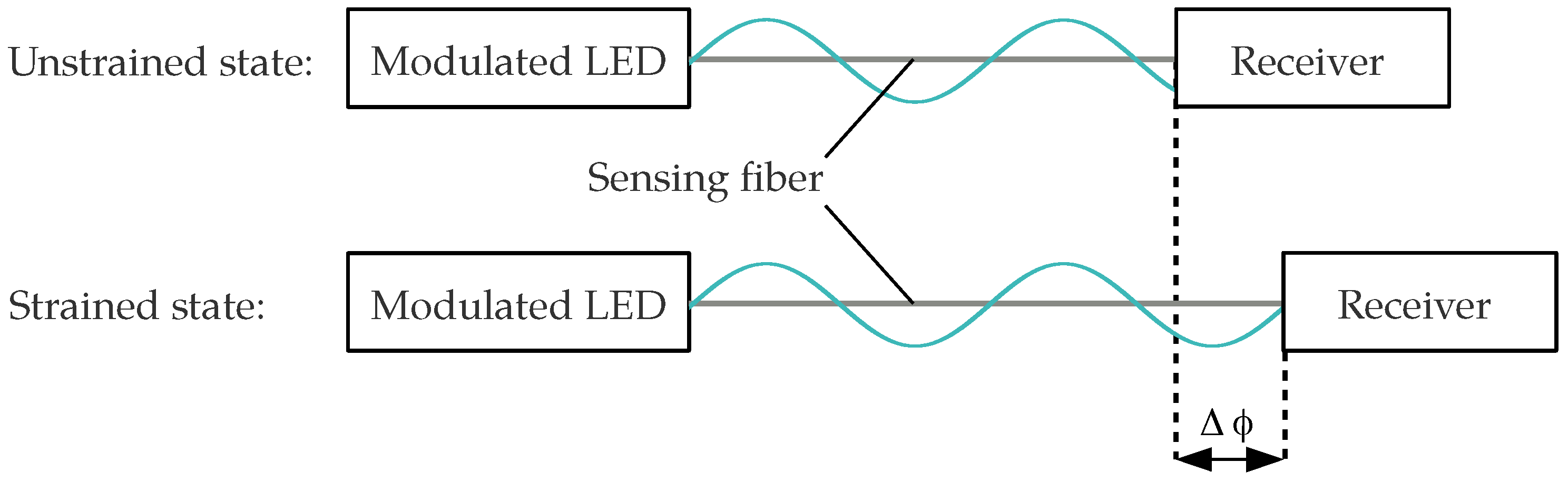
We have proposed an optical strain sensor based on the phase measurement of an intensity-modulated light wave using an SI-POF instead [
16,
17]. The sensor scheme is simple and competitive. An LED can be used as the light source and an optical receiver is required to convert the intensity-modulated optical power at the end of the fiber into a modulated electrical voltage. When the fiber is strained, the modulation phase at the end of the fiber changes, resulting in a phase shift
, as depicted in
Figure 1. In order to observe the strain state of the sensing fiber, the phase difference between the measured signal and a reference signal can be monitored by a commercially available low-cost integrated circuit (IC). Combined with the general benefits of fiber optical sensors (light weight, immune to electromagnetic interference) and especially the advantages of POF, the sensor design is promising for SHM and other applications. This is especially true since it has been shown that a SI-POF can be strained to more than 40% while maintaining its light-guiding properties [
18]. However, in comparison to a SM-POF, the light propagation in a SI-POF is affected by additional effects, including modal dispersion and the angular dependency of the refractive index of the strained fiber. The impact of these effects on the responsivity of the modulation phase to strain has not yet been evaluated. The intention of this paper is to investigate these influences and the consequences for the responsivity of the proposed sensor.
For an accurate measurement, the sensor requires the strain-induced phase change to be linear to the strain
:
The strain is defined by the ratio of the length change
to the length of the unstrained fiber
:
Therefore, it is clear that the requirement
is given as well. In an ideal fiber, in which only one axial mode propagates, the phase of an intensity-modulated light wave is linear to the length of the fiber:
where
is the refractive index of the core,
is the speed of light in vacuum, and
is the modulation frequency. If we consider only the length change due to strain and neglect the impact on the refractive index, the ideal phase change can be expressed as:
Hence, the linear dependency of the phase change on the strain is fulfilled. In comparison to the ideal fiber, the development of the modulation phase in an SI-POF is not strictly linear to the length of the fiber. Due to influences such as modal and chromatic dispersion, attenuation, and scattering, this is true even for an unstrained SI-POF. Therefore, we introduce
, which describes the modulation phase in an SI-POF including the mentioned influences:
expresses the deviation of the development of the real modulation phase from the ideal phase depending on the length of the fiber. We recently developed a novel fiber model for multi-mode fibers (MMFs) which is yet to be published [
19]. It takes all previously mentioned effects into account, which spoil the linear dependency of the modulation phase on the length of the fiber. The model computes the impulse response of the fiber based on scattering and attenuation data obtained from an SI-POF. When transferred to the frequency domain, the phase response allows us to predict the development of the real modulation phase
along the fiber in the absence of strain. The development of the phase depends on the launching condition and the angular sensitivity of the applied receiver. However, for a realistic launching condition and for a fiber length up to 12
, the predicted modulation phase
is only 2% to 3% larger than the ideal phase
. Furthermore, the deviation only changes slowly over the length of the fiber. The impact of the development of the real modulation phase in an SI-POF on the phase difference can be expressed as:
We derived Equation (
7) neglecting the impact of strain on the refractive index of the core. Kiesel et al. investigated the consequences of axial strain for the refractive index of the core of an SM-POF [
13]. The SM-POF can only guide one mode which is propagating along the axis of the fiber. However, the SI-POF is an MMF and can guide modes up to a maximum propagation angle of
. If we consider the refractive index of the unstrained core to be
and the one of the cladding to be
, the maximum guided angle is
. Therefore, it is not sufficient to evaluate the impact of axial strain applied to the fiber on the refractive index in the direction of the axis of the fiber. We also investigated the impact on the refractive index in the lateral direction, and can therefore determine the refractive index depending on the propagation angle
.
In total, we have to consider the following influences in order to evaluate the full impact of strain on the development of the modulation phase in an SI-POF:
The non-linear dependency of the modulation phase on the length of the fiber is already considered by the novel fiber model. The other influences are also integrated into the fiber model to simulate the development of the real modulation phase
depending on the strain
. It should be mentioned that the lateral deformation is only considered via the impact on the refractive index. The responsivity of the sensor can then be derived from the relation of the real phase change to the ideal phase change:
is the modulation phase change which is obtained from two measurements at different strain states or from the simulations performed with the fiber model.
3. Results and Discussion
3.1. Comparison of the Simulated and Measured Responsivities
Figure 7a shows the responsivity of each strain step simulated with the novel fiber model for both receivers and the three different lengths of the launch fiber preceding the strained range. The responsivity is hereby based on the phase change from step to step, and not on the phase change of the total strain. In all cases, the expected responsivity was in the range of 0.915 to 0.93. This means that the change of the modulation phase for each strain step was smaller than it would be in an ideal fiber.
The dominant influence was the assumed Poisson’s ratio of . The reduction of the diameter of the fiber was not large enough to maintain the volume of the fiber. Hence, the refractive index decreased and therefore the responsivity was reduced in comparison to an ideal fiber. On the other hand, effects such as modal dispersion led to an increased strain responsivity since the modulation phase develops more quickly along an SI-POF than it does along an ideal fiber. The larger the angular acceptance range of the applied receiver, the larger the impact of modal dispersion and the larger the strain responsivity. For that reason, the responsivity was slightly higher for the receiver with the larger angular acceptance range (BPW34) than it was for the receiver with the narrower angular acceptance range (S5052). According to the simulation, the length of the launch fiber and the strain had only a slight influence on the responsivity.
The simulations were repeated, neglecting the angular dependency of the refractive index. The refractive index was set to , independent of the angle . The resulting responsivities barely differed from the depicted values with the angle-dependent refractive index. In fact, the deviation was so small that the responsivities could not be distinguished in the depiction and are therefore not presented.
Since the angular dependency of the refractive index seemed to be negligible, we compared the simulated results to the responsivity of an SM-POF
. It can be derived by the difference of the optical path lengths that the fundamental mode has to travel in the strained and in the unstrained state, divided by the difference of the optical path lengths neglecting the change of the refractive index:
If we consider the maximum strain of and the change of the refractive index as derived for , we obtain a responsivity of the SM-POF of . The simulated values were only ≈1.5% to 3% larger, corresponding to the ratio of how much faster a modulation phase develops along an SI-POF compared to an ideal fiber.
Figure 7b shows the responsivities obtained from the strain measurements. We focus on the results obtained for the receiver with the large angular acceptance range (BPW34) first. All three curves show a value of about
. As in the simulations, the responsivity was only slightly affected by the strain or the length of the launch fiber. Since the measured responsivity was larger than the simulated, one could argue that the Poisson’s ratio used for the simulations might have been too small. It should also be mentioned that the used photoelastic constants were obtained for bulk PMMA. It is therefore possible that the real values for an SI-POF would differ.
The results for the receiver with the smaller angular acceptance range (S5052) differed dramatically from the simulations. As expected, the responsivity was generally smaller than the one for the BPW34. However, it showed a strong dependency on the strain and on the length of the launch fiber. Neither of the dependencies can be explained by any influence that we have considered so far, and are investigated in the next section.
3.2. Far Field of the Strained Fiber
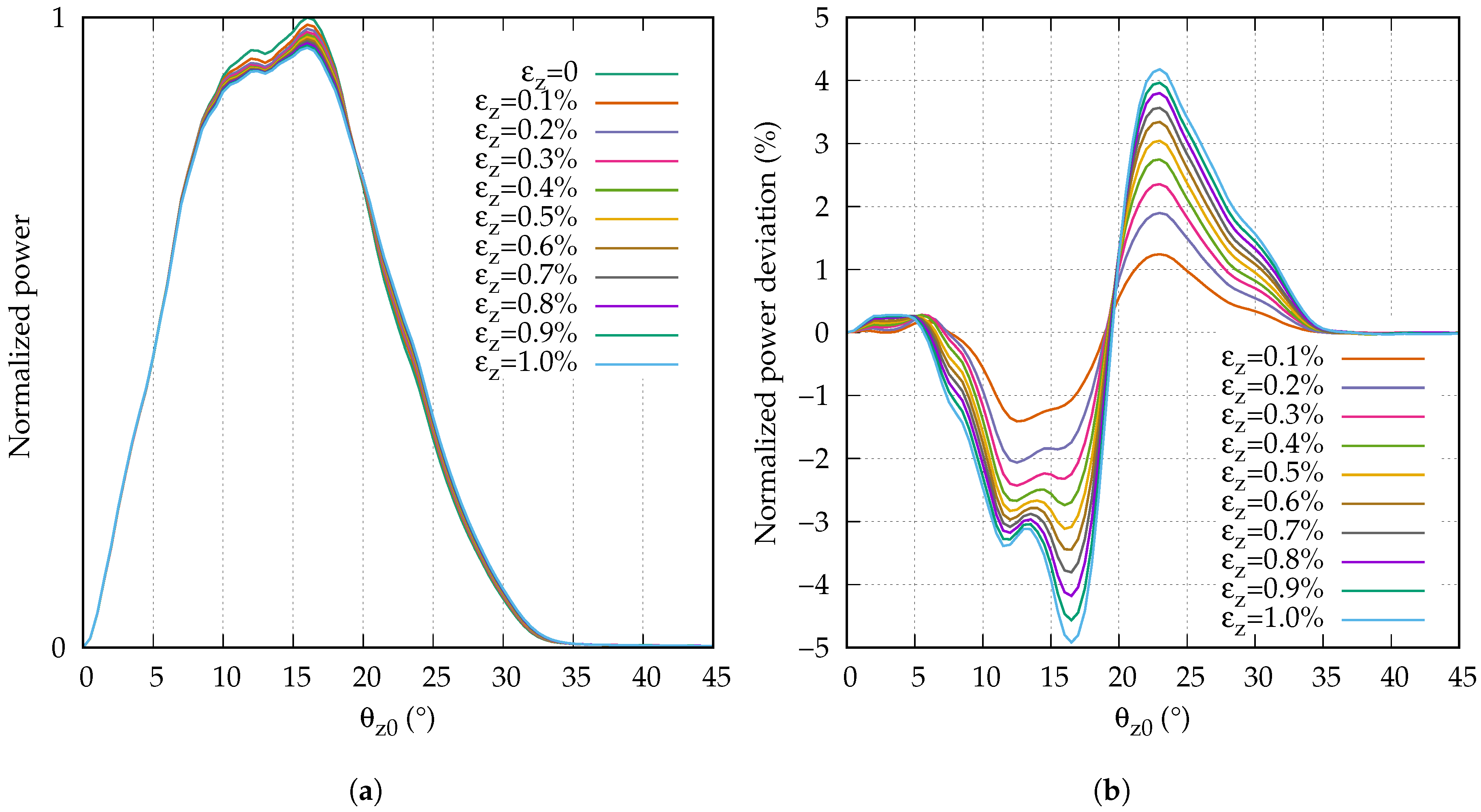
Seeking a possible explanation for the observed results, we measured the far field at the end of the fiber under different strain conditions. The length of the launch fiber was
, and
Figure 8a shows the angular power distribution of the far fields normalized to a maximum power of 1. While it can be seen that the peak power decreased with the strain, the changes were too small to be well observable in this representation. Therefore,
Figure 8b shows the normalized power deviation of each strain step compared to the far field of the unstrained fiber. The power deviations were normalized to the maximum normalized power level (1). Several conclusions can be drawn from
Figure 8b. When the fiber was strained, a part of the power in the range of
5
to 18
was shifted towards the range of
18
to 35
. The stronger the strain, the larger the shifted power. However, the increase of the shifted power per strain step decreased with the strain.
Unfortunately, we are not able to predict the exact impact of the power shift on the modulation phase since we only observed the far field depending on the strain. It is not fully clear how much power was coupled from one mode to another since by evaluating the far field, we could only observe the sum of all power redistributions. However, we are able to explain some of the consequences for the measurement of the modulation phase.
In order to understand the consequences of the far field changes for the strain measurement, we must first consider the development of the phase of the modulated signal at the end of the fiber. All propagating modes were modulated with the same frequency and the modulation phase of the total signal was determined from the superposition of all modes. The strain-induced scattering of power into higher-order modes affects the modulation phase in two ways. First of all, the mean transit time of the propagating light increases, since some power of lower order modes is shifted to higher order modes. Second, the sensitivities of the used receivers were angle-dependent (
Figure 6). The receivers were therefore less sensitive to a certain power in a higher-order mode than they were to the same power in a lower-order mode. Therefore, the conditions on which the phase of the modulated signal depend change during the strain.
Both receivers were affected in the same way by the change of the mean transit time of the propagating light. Since only the strain measurement with the receiver with the narrow angular acceptance range (S5052) showed a dependency on the strain, the change of the mean transit time seemed to have a negligible impact on the modulation phase. Subsequently, the responsivity of the sensor was also unaffected.
Both receivers differed strongly in their angular sensitivity. Consequently, the impact of the strain-induced power shift to higher-order modes had a different impact on the strain measurement, depending on the receiver. The BPW34 has a broad angular acceptance range. The power which was shifted to higher order modes was therefore detected with almost the same sensitivity with which it would have been detected without the power shift. As a result, the responsivity of the sensor was almost independent of the strain. The S5052 has a narrow angular acceptance range. As a result, the power which was shifted to higher-order modes was detected with a much lower sensitivity. In fact, a part of the shifted power was not detected at all. For that reason, the responsivity of the sensor with the S5052 showed a strong strain dependency.
Furthermore, we saw that the amount of power which was shifted per strain step decreased with the strain. As a consequence, the responsivity of the strain measurement with the S5052 changed more quickly at the beginning of the strain range than it did at the end. In fact, the responsivities of all three measurements seemed to converge towards a value of approximately .
Another interesting detail of the strain measurement with the S5052 was the dependence of the responsivity on the length of the unstrained launch fiber. The longer the fiber, the stronger the change of the responsivity due to the strain. The far field of the launching condition had a narrower range than the far field depicted in
Figure 8a, which was recorded after 10
of fiber. Hence, while propagating, the far field broadened due to the scattering-induced mode coupling. Since the S5052 has a rather narrow angular acceptance range, the impact of strain on the modulation phase was larger for a broader far field.
We did not investigate the origin of the strain-induced power scattering to higher order modes, but at least two causes seem possible. One explanation would be that the polymer chains of the core were aligned due to the strain which affected the scatter process of the fiber. This could also explain why the change decreased with the strain. Another cause could be the introduction of defects at the core–cladding interface, by which the scattering was affected. However, since the whole process is reversible, the latter theory seems unlikely.
4. Conclusions
We investigated the impact of strain on an SI-POF and evaluated the consequences for the responsivity of a strain sensor based on the phase measurement of an intensity-modulated signal. We considered the geometrical deformation of the fiber as well as the impact on the angular-dependent refractive index. By integrating the known effects into a novel fiber model, we simulated the responsivity of the sensor for different scenarios and compared the predictions to experimentally obtained data.
The simulations with the model led to the conclusion that the angular-dependency of the refractive index was negligible. Furthermore, the measured responsivities were larger than the simulated ones. This could be caused by the Poisson’s ratio of an SI-POF being actually larger than the assumed value of . It might also be caused by the assumed photoelastic constants. Since they were obtained for bulk PMMA, they could be different for an SI-POF as well.
We showed that the application of axial strain to an SI-POF affected the scattering process encountered by the propagating light. This can have a significant impact on the modulation phase, depending on the length of the fiber and the applied strain. As a consequence, the responsivity of the sensor can significantly change during the strain if a receiver with a narrow angular acceptance range is used. Since this effect depends on the far field at the end of the fiber, its consequences for the strain measurement can hardly be predicted, and are therefore likely to cause a measurement error. The exact change of the scattering process is not known yet. However it was shown that a stable responsivity of the sensor could be achieved by using a receiver with a large angular acceptance range.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







