Cooperative Dynamic Game-Based Optimal Power Control in Wireless Sensor Network Powered by RF Energy



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
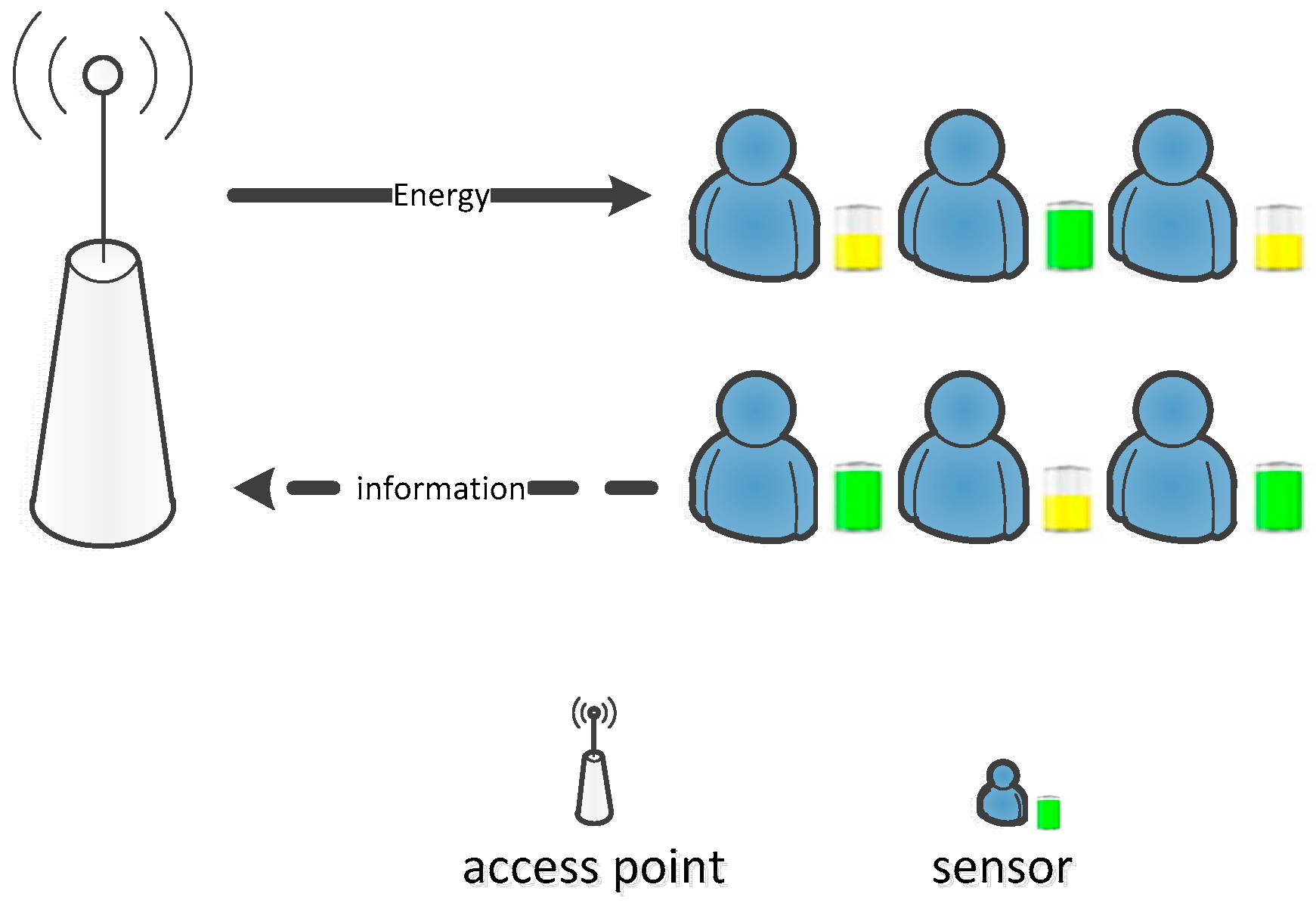
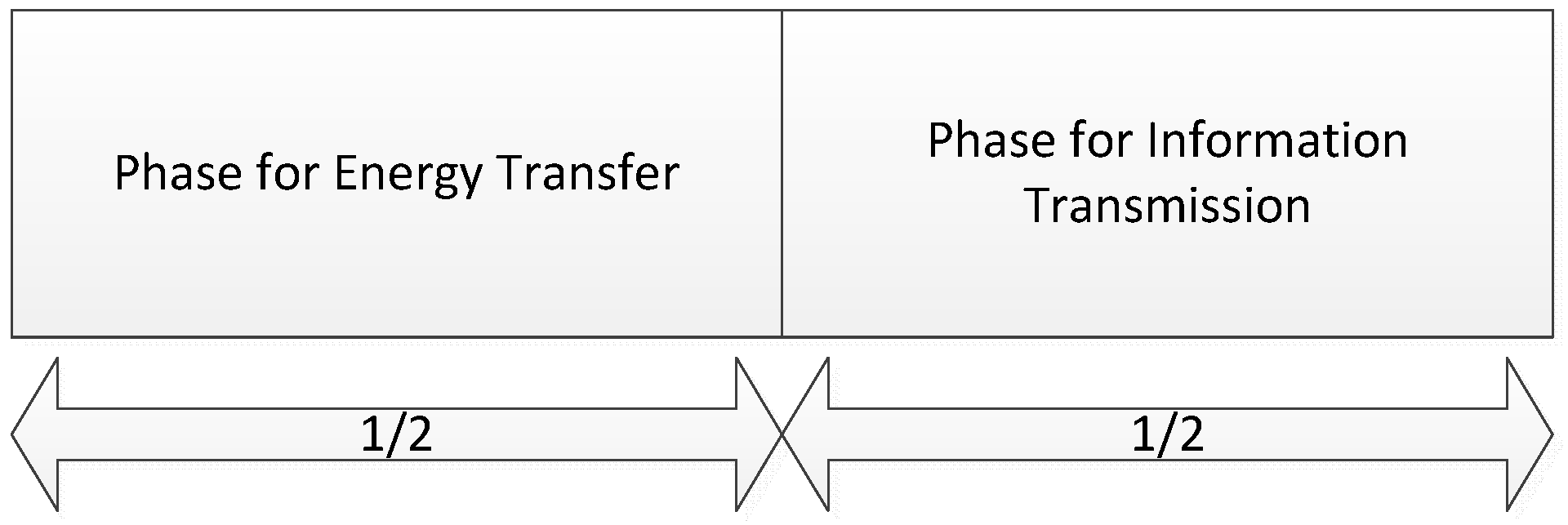
- Firstly, we formulate the system model of the wireless sensor network powered by RF energy, which consists of one access point and N sensor nodes, where the sensor nodes can harvest energy and transmit information simultaneously.
- Secondly, a dynamic game model is proposed to formulate the power control problem in the proposed network. The energy variations are considered as the system state, and the objective function is composed by the SINR and energy requirements.
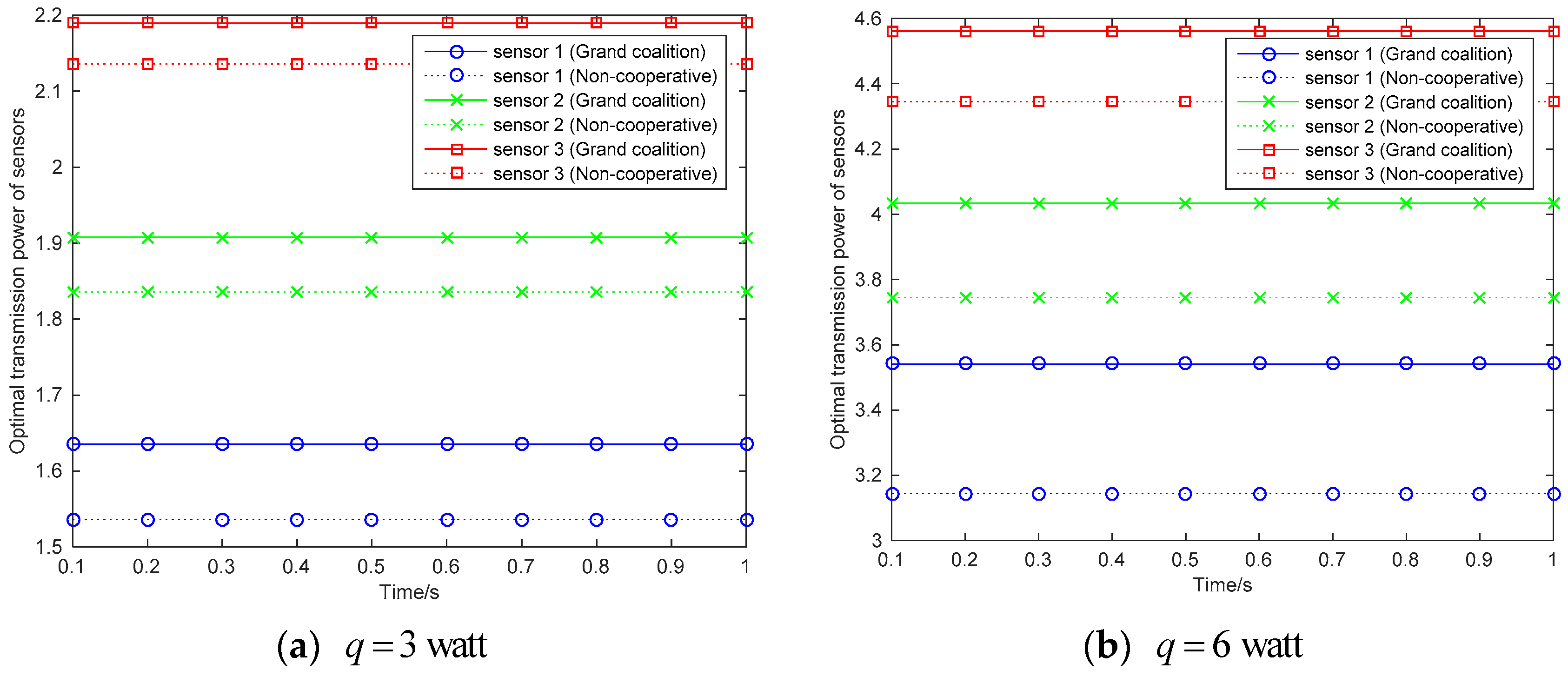
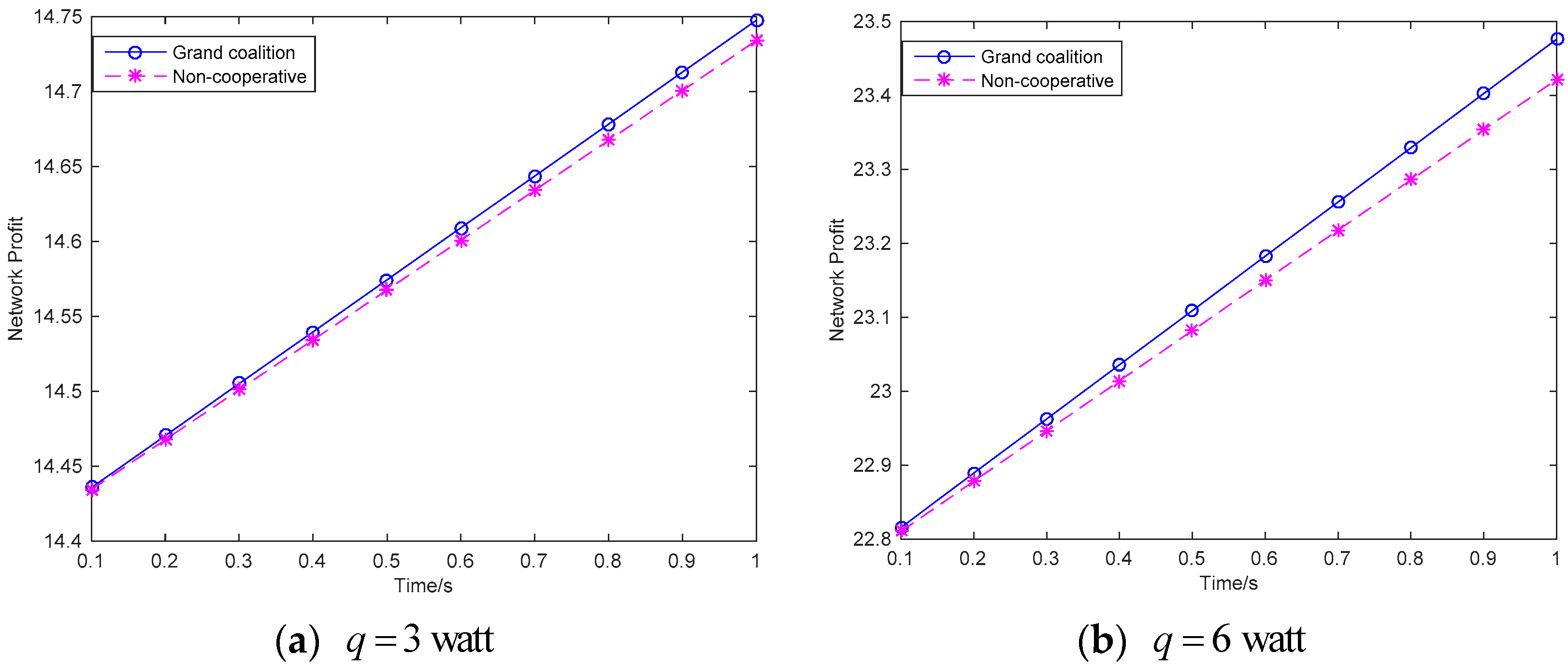
- Finally, two kinds of analyses are given, which are the grand coalition solutions and non-cooperative solutions for the sensors.
2. System Model and Problem Formulation
2.1. System Model
2.2. Energy State
2.3. Problem Formulation
- Players: All wireless sensors.
- Strategy space: All wireless sensors can cooperatively choose their information transmit power to maximize the utility given in (7).
- State: The battery energy state is denoted by vector x, where the state is controlled by the dynamic constraint in Equation (4).
- Objective function: All of the wireless sensors act to maximize their utility.
3. Solutions and Analysis
3.1. Computation of Optimal Cost of Grand Coalition
3.2. Computation of Feedback Nash Equilibrium
3.3. Computation of Optimal Cost for Intermediate Coalitions
3.4. Definition of the Characteristic Function and Computation of the Shapley Value
3.5. Computation of IDP Functions
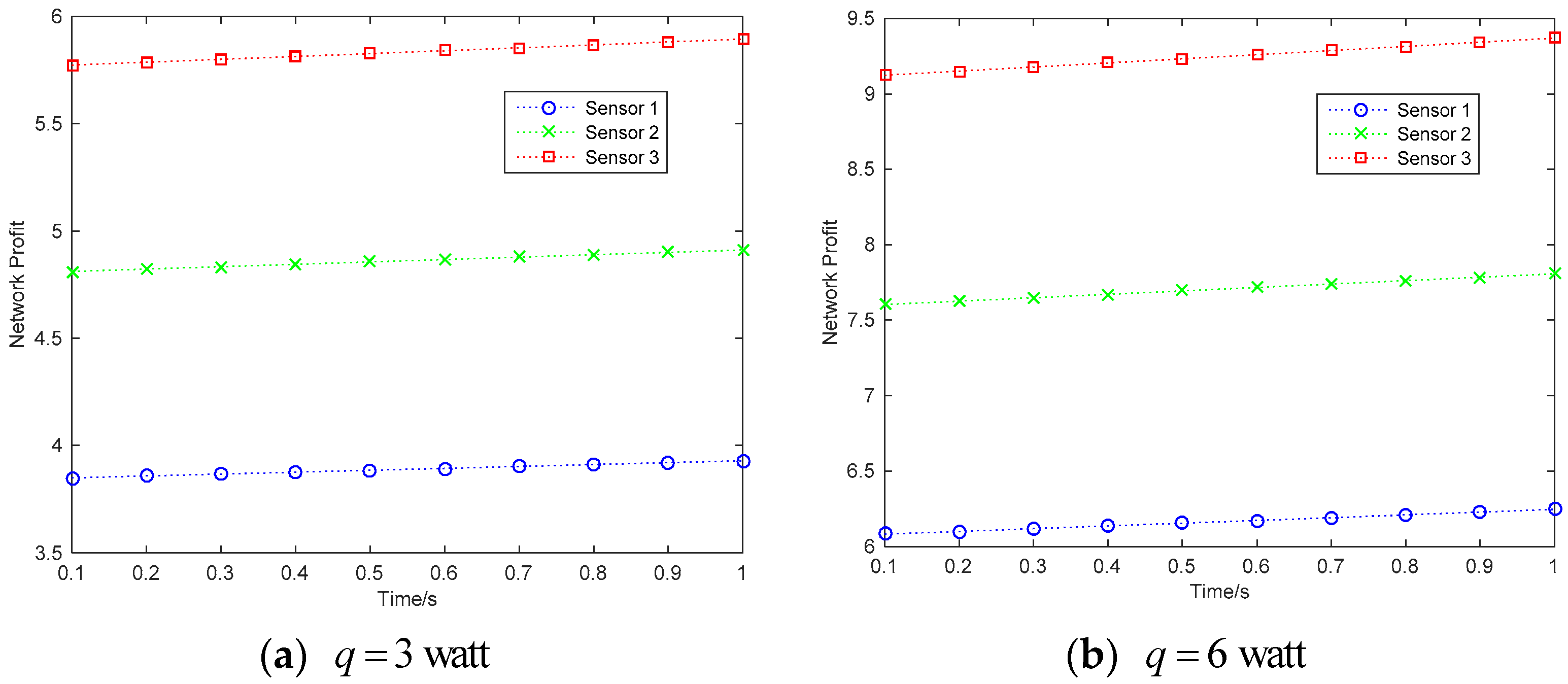
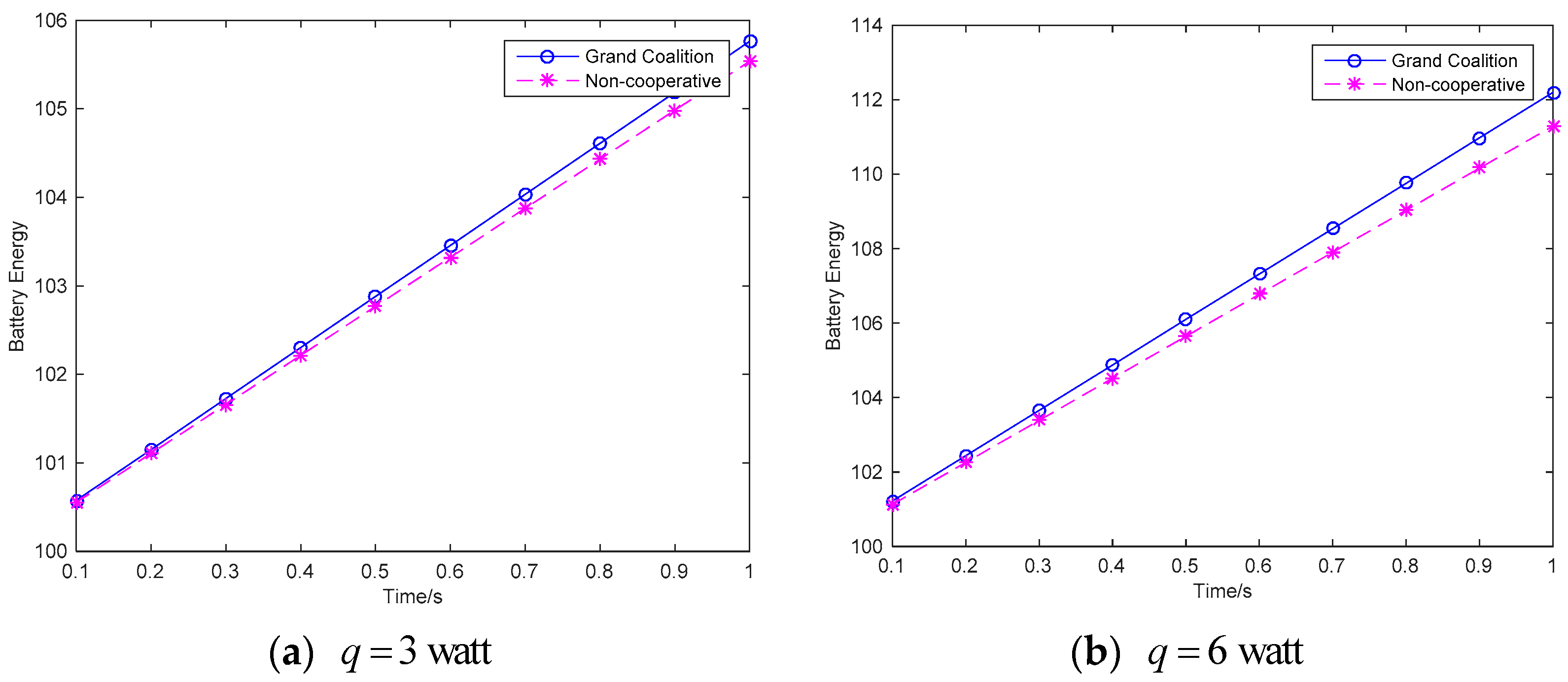
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pereira, F.; Correia, R.; Carvalho, N.B. Passive Sensors for Long Duration Internet of Things Networks. Sensors 2017, 17, 2268. [Google Scholar] [CrossRef] [PubMed]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, A. Wireless power transfer and applications to sensor networks. IEEE Wirel. Commun. 2013, 20, 140–145. [Google Scholar]
- Ogundile, O.O.; Alfa, A.S. A Survey on an Energy-Efficient and Energy-Balanced Routing Protocol for Wireless Sensor Networks. Sensors 2017, 17, 1084. [Google Scholar] [CrossRef] [PubMed]
- Lohani, S.; Mallick, S.; Hossain, E.; Bhargava, V.K. Resource allocation in OFDMA-based wireless-powered cooperative sensor networks. In Proceedings of the IEEE International WIE Conference on Electrical and Computer Engineering, Dhaka, Bangladesh, 19–20 December 2015; pp. 65–69. [Google Scholar]
- Ju, H.; Zhang, R. Throughput Maximization in Wireless Powered Communication Networks. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013. [Google Scholar]
- Zhang, F.; Jing, T.; Huo, Y.; Jiang, K. Outage Probability Minimization for Energy Harvesting Cognitive Radio Sensor Networks. Sensors 2017, 17, 224. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Zhong, Z.; Ai, B. Wireless Powered Sensor Networks: Collaborative Energy Beamforming Considering Sensing and Circuit Power Consumption. IEEE Wirel. Commun. Lett. 2016, 5, 344–347. [Google Scholar] [CrossRef]
- Sangare, F.; Xiao, Y.; Niyato, D.; Han, Z. Mobile Charging in Wireless-Powered Sensor Networks: Optimal Scheduling and Experimental Implementation. IEEE Trans. Veh. Technol. 2017, 66, 7400–7410. [Google Scholar] [CrossRef]
- Chang, Z.; Gong, J.; Li, Y.; Zhou, Z.; Ristaniemi, T.; Shi, G.; Han, Z.; Niu, Z. Energy Efficient Resource Allocation for Wireless Power Transfer Enabled Collaborative Mobile Clouds. IEEE J. Sel. Areas Commun. 2016, 34, 3438–3450. [Google Scholar] [CrossRef]
- Niyato, D.; Lu, X.; Wang, P.; Kim, D.I.; Han, Z. Distributed wireless energy scheduling for wireless powered sensor networks. In Proceedings of the IEEE International Conference on Communications, Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar]
- Liu, J.; Xiong, K.; Fan, P.; Zhong, Z. Resource Allocation in Wireless Powered Sensor Networks with Circuit Energy Consumption Constraints. IEEE Access 2017, 5, 22775–22782. [Google Scholar] [CrossRef]
- Ha, T.; Kim, J.; Chung, J.M. HE-MAC: Harvest-then-Transmit based Modified EDCF MAC Protocol for Wireless Powered Sensor Networks. IEEE Trans. Wirel. Commun. 2017, 17. [Google Scholar] [CrossRef]
- Yousaf, R.; Ahmad, R.; Ahmed, W.; Haseeb, A. Fuzzy Power Allocation for Opportunistic Relay in Energy Harvesting Wireless Sensor Networks. IEEE Access 2017, 5, 17165–17176. [Google Scholar] [CrossRef]
- Kwan, J.; Fapojuwo, A. Radio Frequency Energy Harvesting and Data Rate Optimization in Wireless Information and Power Transfer Sensor Networks. IEEE Sens. J. 2017, 17, 4862–4874. [Google Scholar] [CrossRef]
- Rufus, I. Differential Games III; Dover Publications, Inc.: Mineola, NY, USA, 1954. [Google Scholar]
- Xu, H.; Zhou, X. Optimal Power Control in Cooperative Relay Networks Based on a Differential Game. ETRI J. 2014, 36, 280–285. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Guo, C.; Zhang, L. Optimal Power Control in Wireless Powered Sensor Networks: A Dynamic Game-Based Approach. Sensors 2017, 17, 547. [Google Scholar] [CrossRef] [PubMed]
- Barroca, N.; Saraiva, H.M.; Gouveia, P.T.; Tavares, J.; Borges, L.M.; Velez, F.J.; Loss, C.; Salvado, R.; Pinho, P.; Gonçalves, R.; et al. Antennas and circuits for ambient RF energy harvesting in wireless body area networks. In Proceedings of the International Symposium on Personal Indoor and Mobile Radio Communications, London, UK, 8–11 September 2013; pp. 532–537. [Google Scholar]
- Ju, H.; Zhang, R. Throughput maximization in wireless powered communication networks. IEEE Trans. Wirel. Commun. 2014, 13, 418–428. [Google Scholar] [CrossRef]
- Yeung, D.W.K.; Petrosjan, L.A. Cooperative Stochastic Differential Games; Springer: New York, NY, USA, 2006. [Google Scholar]
- Martin, J.O. An Introduction to Game Theory; Oxford University Press: New York, NY, USA, 2004; Volume 9, pp. 841–846. [Google Scholar]
- Petrosjan, L.; Zaccour, G. Time-consistent Shapley value allocation of pollution cost reduction. J. Econ. Dyn. Control 2003, 27, 381–398. [Google Scholar] [CrossRef]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Xu, H.; Zhou, X. Cooperative Dynamic Game-Based Optimal Power Control in Wireless Sensor Network Powered by RF Energy. Sensors 2018, 18, 2393. https://doi.org/10.3390/s18072393
Wang M, Xu H, Zhou X. Cooperative Dynamic Game-Based Optimal Power Control in Wireless Sensor Network Powered by RF Energy. Sensors. 2018; 18(7):2393. https://doi.org/10.3390/s18072393
Chicago/Turabian StyleWang, Manxi, Haitao Xu, and Xianwei Zhou. 2018. "Cooperative Dynamic Game-Based Optimal Power Control in Wireless Sensor Network Powered by RF Energy" Sensors 18, no. 7: 2393. https://doi.org/10.3390/s18072393
APA StyleWang, M., Xu, H., & Zhou, X. (2018). Cooperative Dynamic Game-Based Optimal Power Control in Wireless Sensor Network Powered by RF Energy. Sensors, 18(7), 2393. https://doi.org/10.3390/s18072393