Joint Energy Supply and Routing Path Selection for Rechargeable Wireless Sensor Networks



Abstract
:1. Introduction
1.1. Background and Motivation
- (1)
- Energy-saving routing algorithm design. Firstly, we need to design a reasonable forwarding node selection mechanism, and control routing cost as much as possible within a reasonable range. Secondly, how to predict the charging behavior cooperates with the energy supply strategy to maximize network utility and balance energy supplementation with energy consumption at full steam.
- (2)
- Energy replenishment strategy design. Unlike the wired networks with approximately unlimited energy, the rechargeable WSNs require an optimized charging schedule to achieve permanent survival. If the initiative power supply method is adopted, the first question to be answered is how to allocate a limited amount of energy when the actual energy supply capacity is not sufficient.
1.2. Related Work
1.3. Contributions
- We propose a two-stage energy replenishment strategy with limited energy supply capacity. The strategy uses an initiative power supply method with obvious advantages to charge the sensor nodes. Based on several important parameters such as the residual energy of nodes, the future energy consumption rate of nodes, the charging duration and charging speed of WCD, etc., each node of the charging time can be determined in two stages. Thereinto, we set a charging time update strategy to improve the energy utilization efficiency, which can optimize the energy distribution according to the WCD energy replenishment ability and the nodal energy consumption intensity.
- We propose an algorithm by considering the joint optimization of energy supply and routing. Jointly considering the energy status of nodes, energy consumption and energy supply, we propose a routing selection algorithm. In this algorithm, we consider not only the transmission energy from the current node to the next-hop node, but also the energy consumption of the next-hop node to the sink node, which impacts the delay and cost of data transmission. In addition, in order to avoid nodal premature death, the estimated residual energy of nodes has been taken into consideration, and the influence of energy supply model on the node transmission capacity has also been joined.
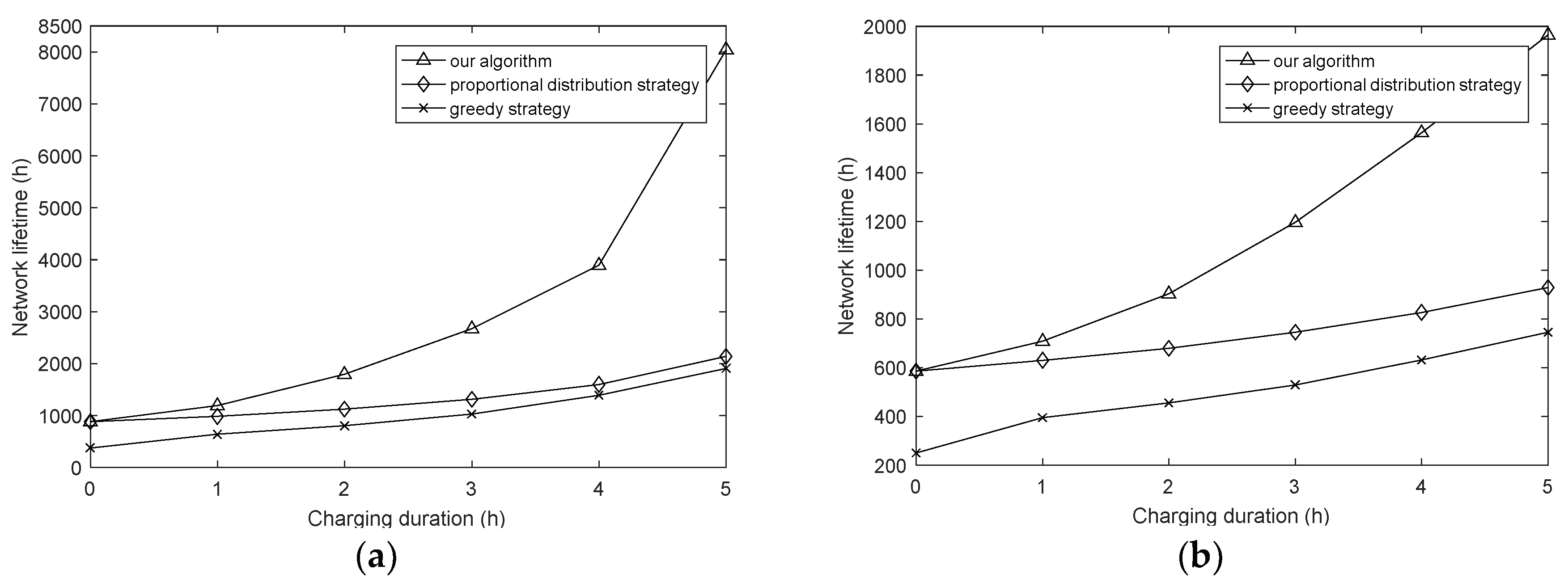
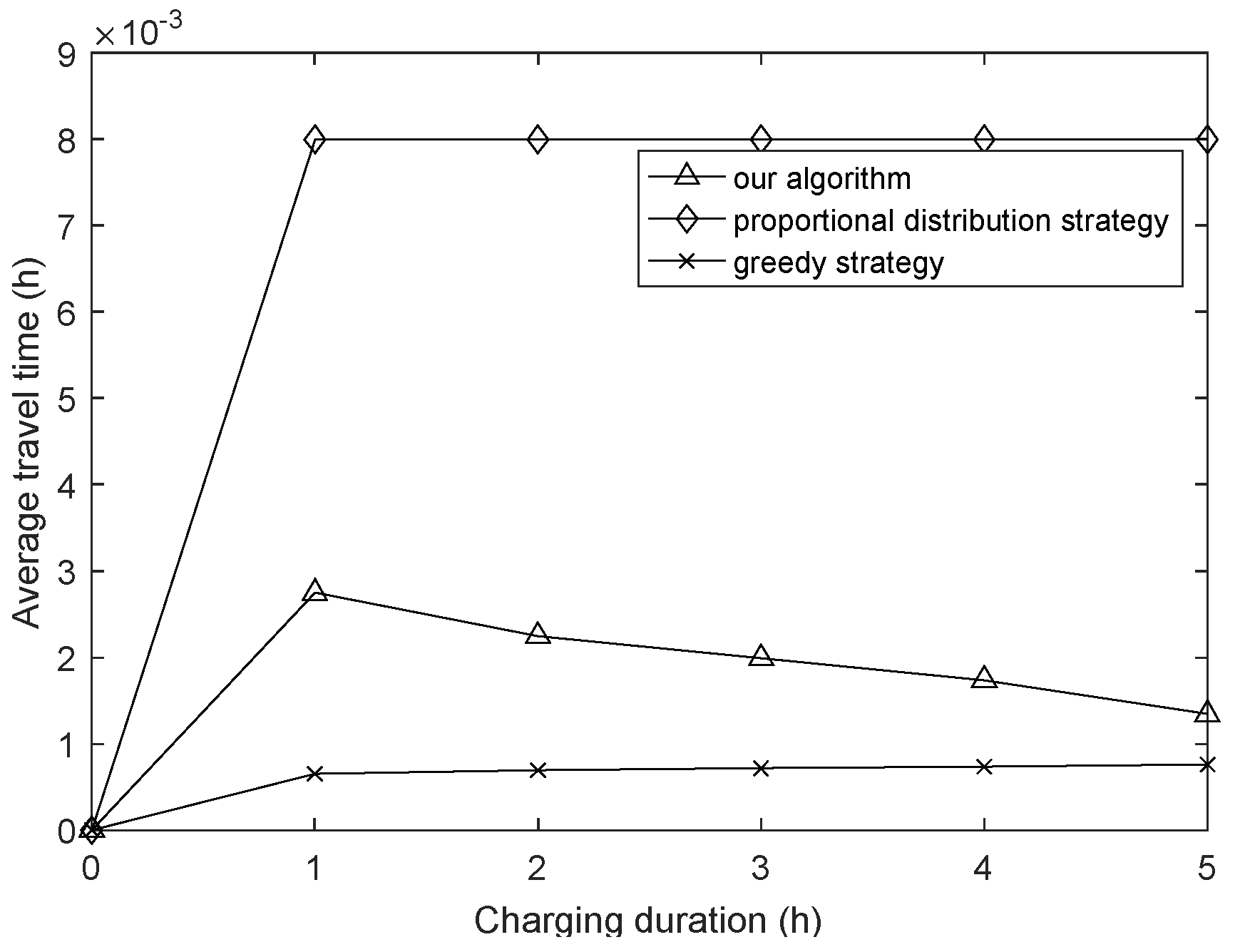
- We analyze the proposed algorithm from the perspectives of parameters and computational complexity. Besides, the algorithm is evaluated from the perspectives of the fusion index, harmonic coefficient, network size, charging duration based on our simulation. We compare the proposed algorithm with other two strategies—the proportional distribution strategy and greedy strategy. The simulation results show that our algorithm can effectively prolong the network lifetime, and it is able to obtain different demands of network delay and energy consumption by dynamically adjusting the relevant parameters.
2. Guideline Supplements
- (1)
- The location of sensor nodes will not be changed after being deployed, and the distance from one sensor node to another can be estimated based on the received signal strength.
- (2)
- All sensor nodes are isomorphic with the same function of routing, issuing and collecting, and they also have the same initial state. Besides, the residual energy of each node at any time is accessible to the base station, so that it can make decision. Moreover, the energy of sink is not limited.
- (3)
- Each node collects data at an equal and constant rate , and the sensed data is not aggregated with the received data. Besides, they adopt the first-in-first-out approach to packet processing, and the initial load is 0, the length of the cache queue is also limited.
3. A Joint Algorithm of Energy Supply and Routing Selection
3.1. Two-Stage Energy Replenishment Strategy
- The strategy takes the mean value of historical data of each node for a period of time as the future energy consumption rate , then calculates the remaining lifetime for all nodes and sorts them from low to high to receive an element set that needs to be updated:where is the set of elements with . Then, it defines two pointers, that is and , whose initial values are set to 1 and , respectively, pointing to the first element and the tail element of the set .
- Taking into account the WCD’s limited energy supply capacity and the efficient usage of charging energy, the algorithm needs to adjust the original charging time. Firstly, when the charging time of node is , and if the battery capacity ceiling has not been reached, then all the charging time of node is cut to node while the pointer forward displacement of one, namely this pointer plus 1; otherwise, we cut part of to node to make it full of energy, and the pointer backward displacement of one (that is, the pointer minus 1). The algorithm continuously performs this step until the values of pointers and are equal or the remaining lifetime of node is less than .
| Algorithm 1: The Charging Time Scheduling Strategy |
| Input: the initial energy , the residual energy , the estimated energy consumption rate , the charging duration of WCD, the charging rate , the location of each node. Output: each node’s charging time and the travel path of mobile charger. /*the maximum charging time for each node*/ /*the original charging time of each node*/ /*the estimated remaining lifetime of each node*/ Calculate the charging schedule cycle according to and the maximum travel time. Sort the remaining lifetime from small to large to obtain the element set .  Calculate the shortest travel path for visiting nodes selected to be charged. return and the shortest travel path. |
| Algorithm 2: The Shortest Travel Path Based on the Simulated Annealing Algorithm |
| Input: the flight velocity of mobile charger , the coordinates of all charged nodes in the current charging schedule. Output: the shortest travel path and the travel time of mobile charger . /*generate an initial path according to the coordinates */ /*the length of the current path*/ /*used to control the cooling rate*/ /*the high initial temperature*/ /* the lowest temperature in the search process */  Calculate the travel time of mobile charger. return and . |
3.2. Routing Selection
3.3. Property Analysis and Implementation Guidlines
4. Simulation Results and Analysis
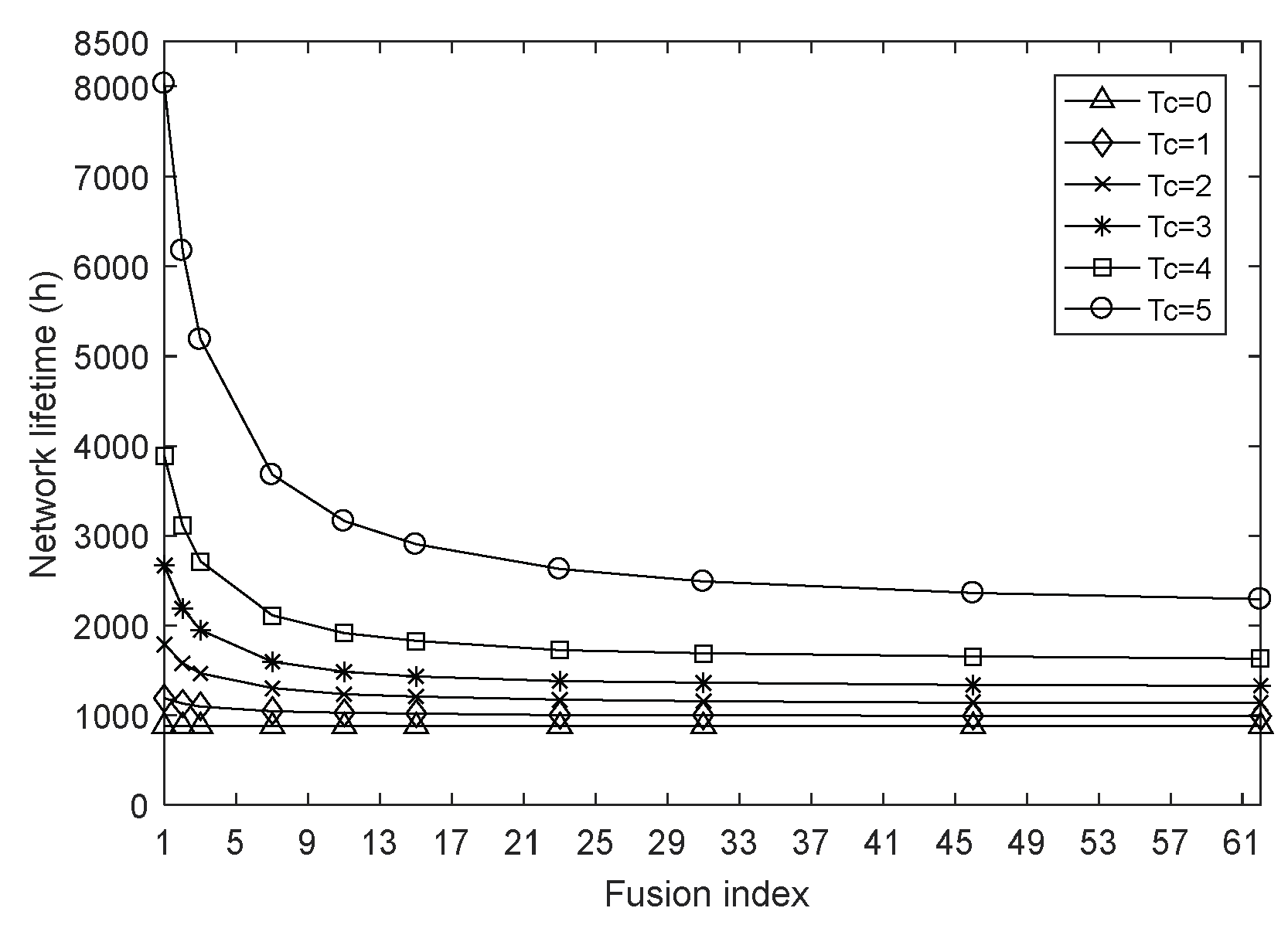
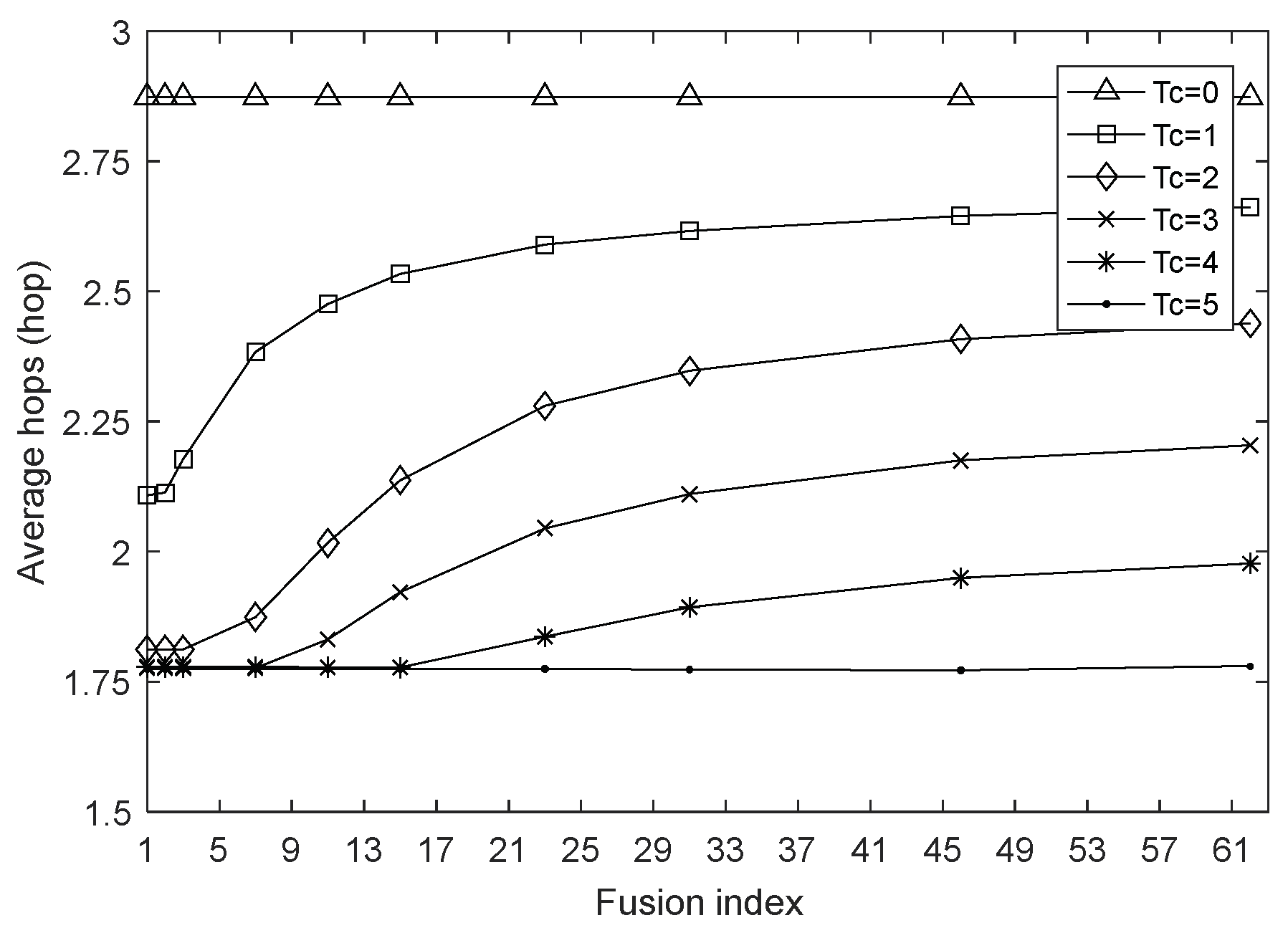
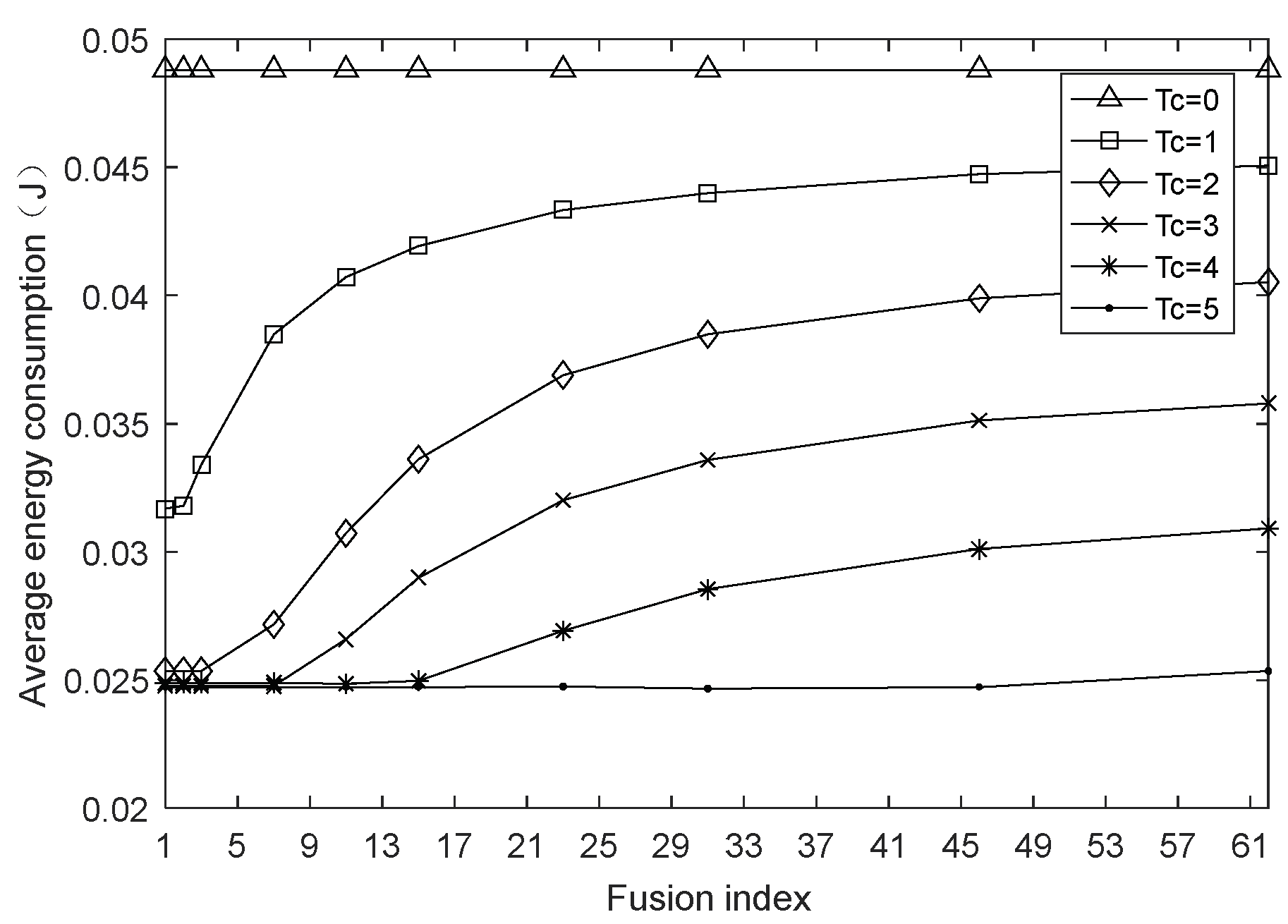
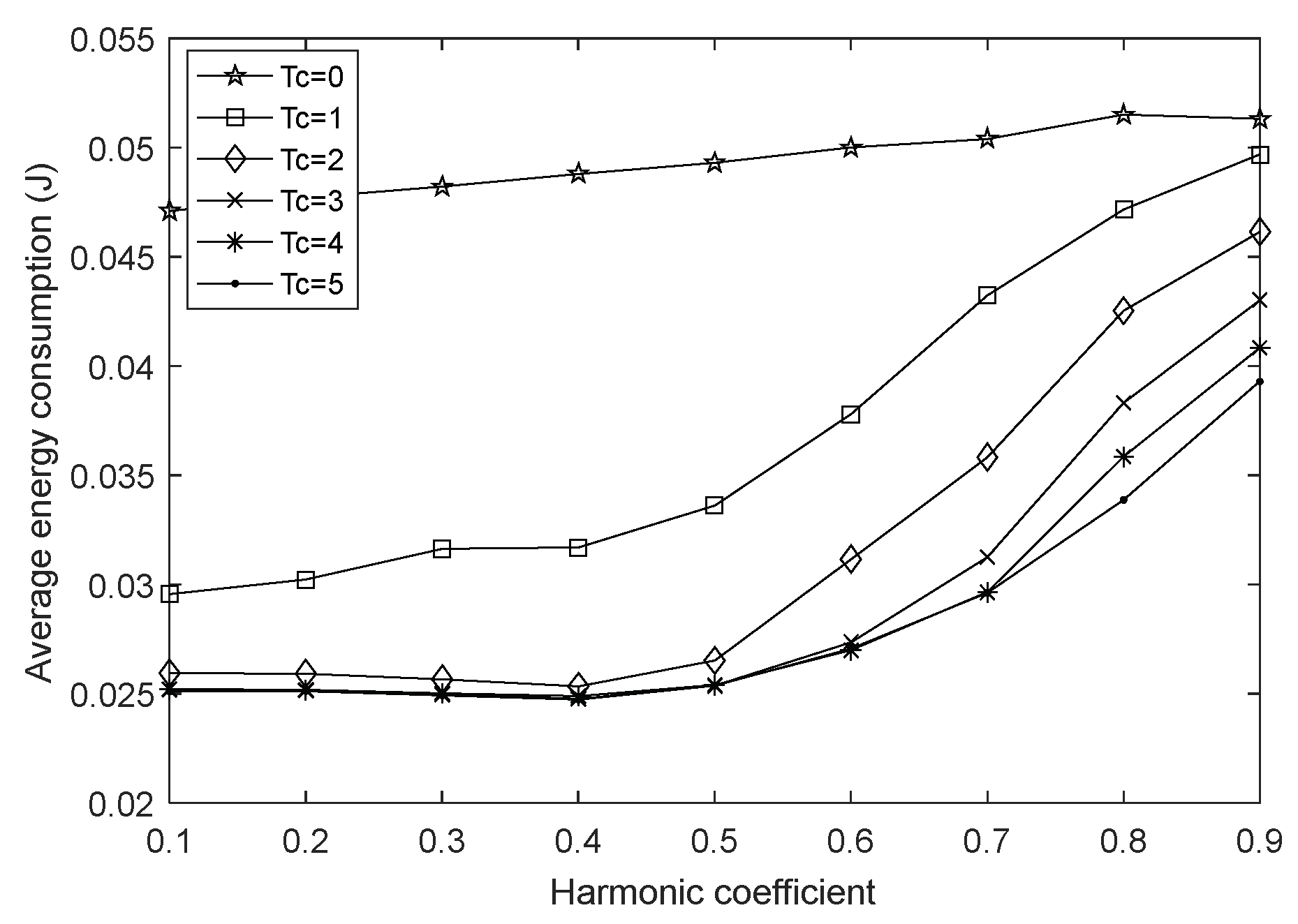
4.1. The Impact of Fusion Index on Network Performances
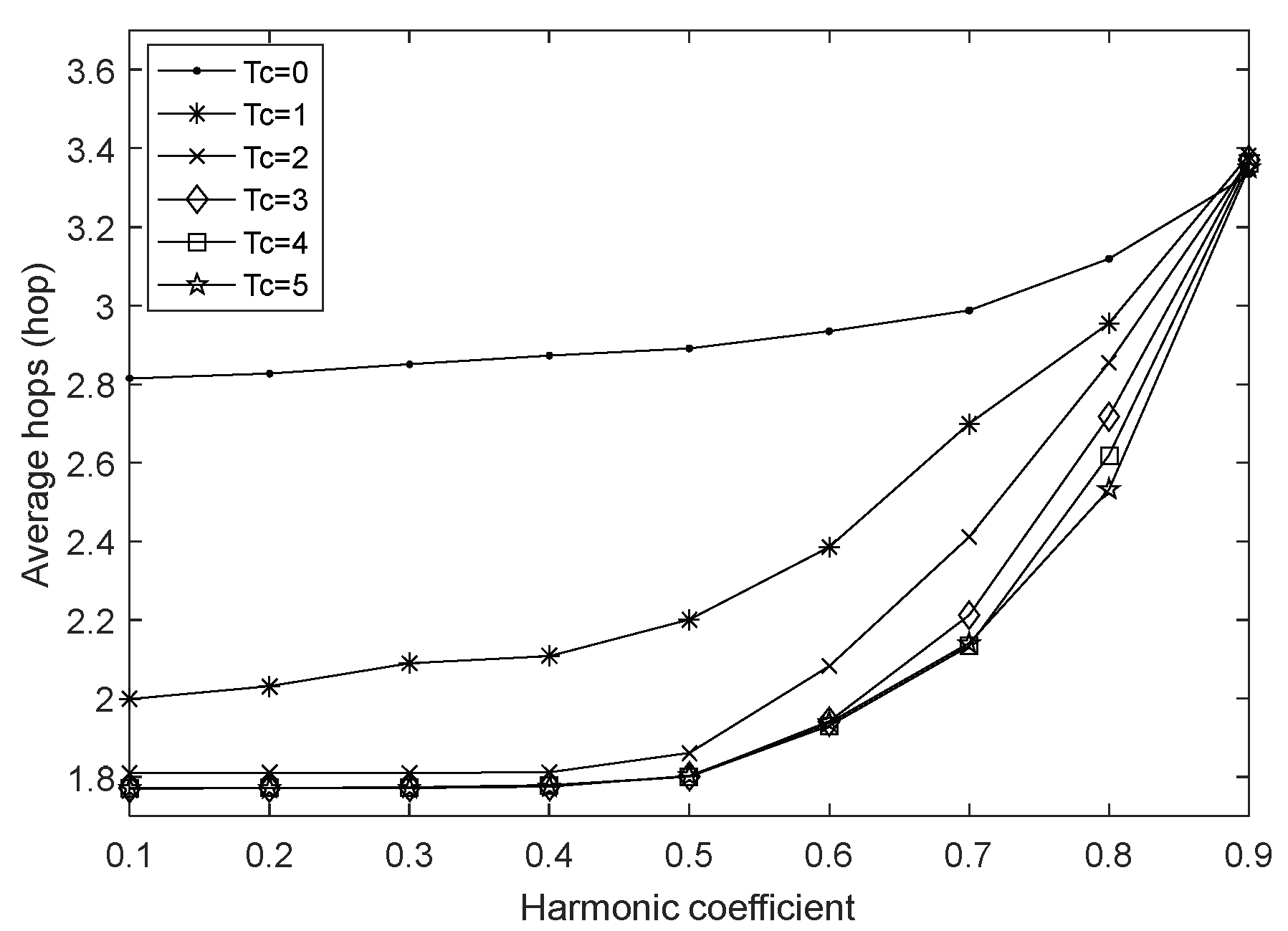
4.2. The Impact of Fusion Index on Network Performances
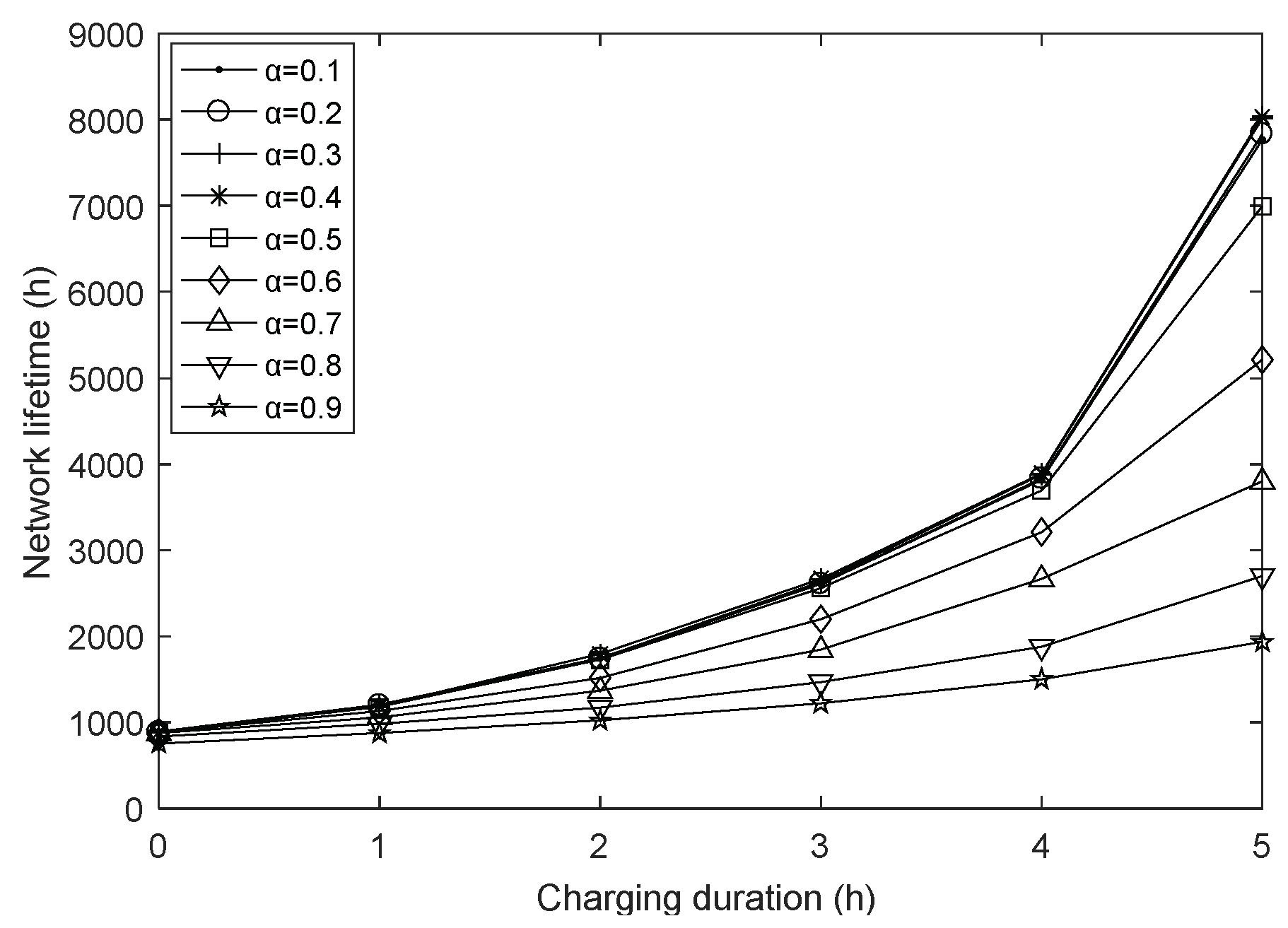
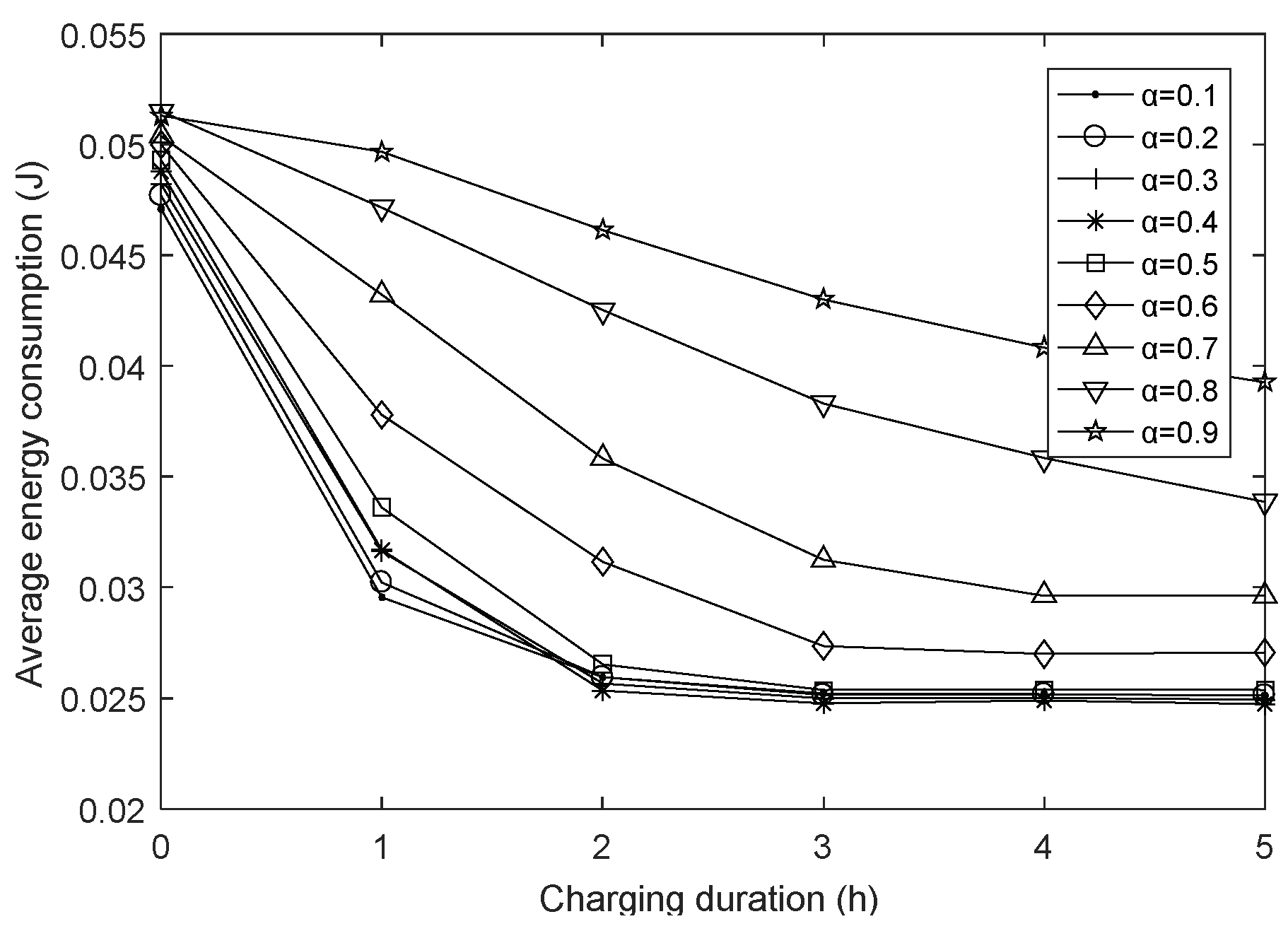
4.3. The Impact of Charging Duration on Network Performances
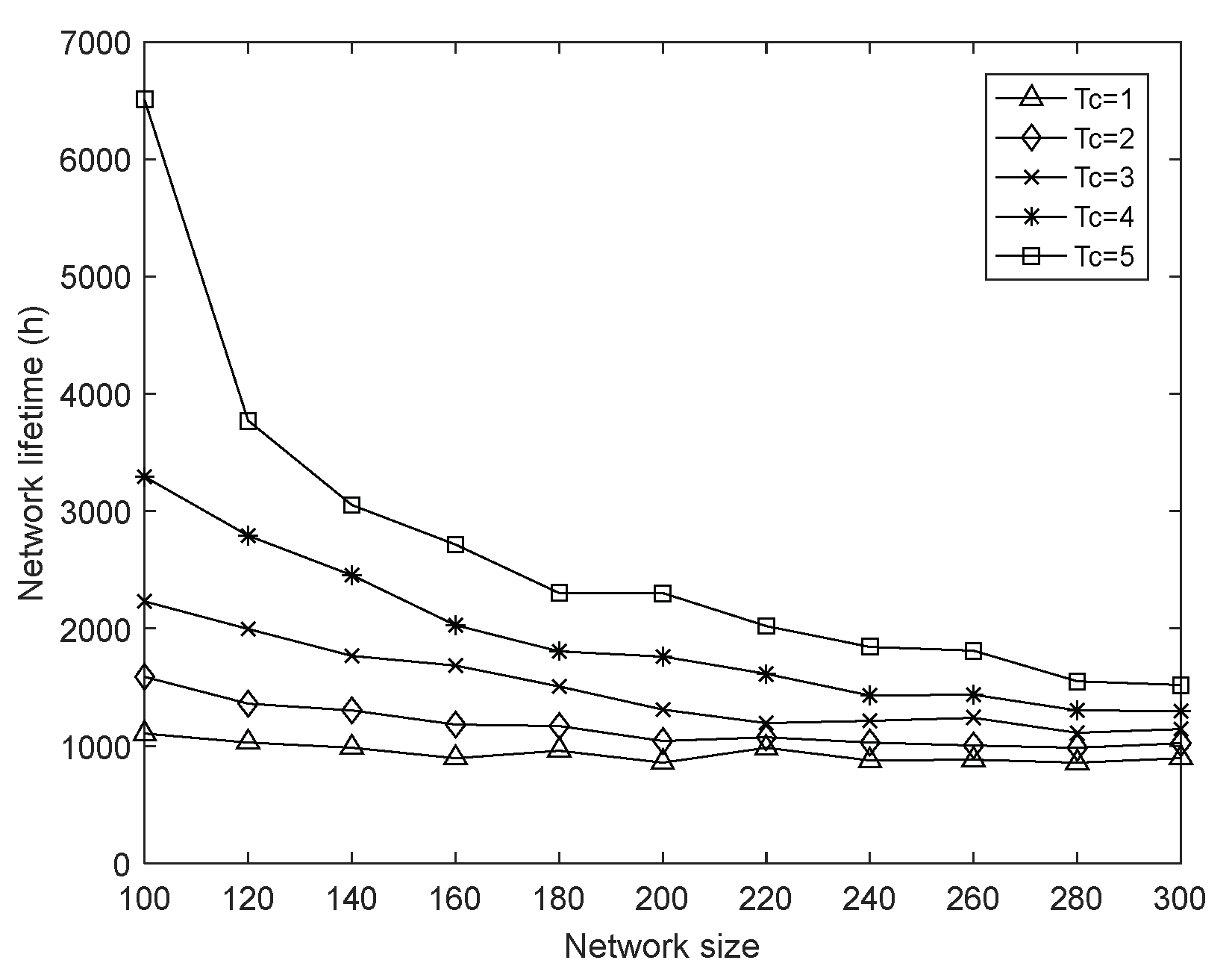
4.4. The Impact of Network Size on Network Performances
4.5. Comparision with Two Other Strategies
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhou, Z.; Yu, H.; Xu, C.; Zhang, Y.; Mumtaz, S.; Rodriguez, J. Dependable content distribution in D2D-based cooperative vehicular networks: A big data-integrated coalition game approach. IEEE Trans. Intell. Trans. Syst. 2018, 19, 953–964. [Google Scholar] [CrossRef]
- Zhou, Z.; Ota, K.; Dong, M.; Xu, C. Energy-efficient matching for resource allocation in D2D enabled cellular networks. IEEE Trans. Veh. Technol. 2017, 66, 5256–5268. [Google Scholar] [CrossRef]
- Zhou, Z.; Gong, J.; He, Y.; Zhang, Y. Software defined machine-to-machine communication for smart energy management. IEEE Commun. Mag. 2017, 55, 52–60. [Google Scholar] [CrossRef]
- Werner-Allen, G.; Johnson, J.; Ruiz, M.; Lees, J. Monitoring volcanic eruptions with a wireless sensor network. In Proceedings of the Second European Workshop on Wireless Sensor Networks, Istanbul, Turkey, 31 January–2 February 2005; pp. 108–120. [Google Scholar]
- Soeharwinto;Sinulingga, E.; Siregar, B. Remote Monitoring of Post-Eruption Volcano Environment Based-On Wireless Sensor Network (WSN): The Mount Sinabung Case. J. Phys. Conf. Ser. 2017, 801, 012084. [Google Scholar] [CrossRef]
- Song, W.Z.; Huang, R.; Xu, M.; Shirazi, B.A.; Lahusen, R. Design and deployment of sensor network for real-time high-fidelity volcano monitoring. IEEE Trans. Parall. Distr. Syst. 2010, 21, 1658–1674. [Google Scholar] [CrossRef]
- Matta, N.; Ranhimamoud, R.; Merghemboulahia, L.; Jrad, A. A Wireless Sensor Network for Substation Monitoring and Control in the Smart Grid. In Proceedings of the IEEE International Conference on Green Computing and Communications, Besancon, France, 20–23 November 2012; pp. 203–209. [Google Scholar]
- Alanbagi, I.; Mouftah, H.T. Opportunities and challenges of heterogeneous networks for substations automation in smart grids. Eng. Technol. Ref. 2015, 1. [Google Scholar] [CrossRef]
- Matta, N.; Rahimamoud, R.; Merghemboulahia, L.; Jrad, A. Enhancing smart grid operation by using a wsan for substation monitoring and control. In Proceedings of the IEEE IFIP Wireless Days, Dublin, Ireland, 21–23 November 2012; pp. 1–6. [Google Scholar]
- Monshi, M.M.; Mohammed, O.A. A study on the efficient wireless sensor networks for operation monitoring and control in smart grid applications. In Proceedings of the IEEE Southeastcon, Jacksonville, FL, USA, 4–7 April 2013; pp. 1–5. [Google Scholar]
- Hu, X.; Wang, B.; Ji, H. A wireless sensor network-based structural health monitoring system for highway bridges. Comput. Aided Civ. Infrastruct. Eng. 2013, 28, 193–209. [Google Scholar] [CrossRef]
- Kumberg, T.; Tannhaeuser, R.; Schink, M.; Schneid, S.; Konig, S.; Schindelhauer, C.; Reindl, L.M. Wireless Wake-up Sensor Network for Structural Health Monitoring of Large-scale Highway Bridges. In Proceedings of the International Conference on Performance–based and Life-Cycle Structural Engineering, Hong Kong, China, 5–7 December 2015. [Google Scholar]
- Al-Radaideh, A.; Al-Ali, A.R.; Bheiry, S.; Alawnah, S. A wireless sensor network monitoring system for highway bridges. In Proceedings of the International Conference on Electrical and Information Technologies, Marrakech, Morocco, 25–27 March 2015; pp. 119–124. [Google Scholar]
- Naranjo, P.G.V.; Shojafar, M.; Mostafaei, H.; Pooranian, Z.; Baccarelli, E. P-SEP: A prolong stable election routing algorithm for energy-limited heterogeneous fog-supported wireless sensor networks. J. Supercomput. 2017, 73, 733–755. [Google Scholar] [CrossRef]
- Baccarelli, E.; Naranjo, P.G.V.; Scarpiniti, M.; Shojafar, M.; Abawajy, J.H. Fog of everything: Energy-efficient networked computing architectures, research challenges, and a case study. IEEE Access. 2017, 5, 9882–9910. [Google Scholar] [CrossRef]
- Deshpande, A.; Montiel, C.; Mclauchlan, L. Wireless Sensor Networks—A Comparative Study for Energy Minimization Using Topology Control. In Proceedings of the Green Technologies Conference, Corpus Christi, TX, USA, 3–4 April 2014; pp. 44–48. [Google Scholar]
- Jiang, B.; Ravindran, B.; Cho, H. Probability-based prediction and sleep scheduling for energy-efficient target tracking in sensor networks. IEEE Trans. Mob. Comput. 2013, 12, 735–747. [Google Scholar] [CrossRef]
- Anchora, L.; Capone, A.; Mighali, V.; Patrono, L.; Simone, F. A novel MAC scheduler to minimize the energy consumption in a wireless sensor network. Ad Hoc Netw. 2014, 16, 88–104. [Google Scholar] [CrossRef]
- Khan, M.I.; Gansterer, W.N.; Guenter, H. Static vs. mobile sink: The influence of basic parameters on energy efficiency in wireless sensor networks. Comput. Commun. 2013, 36, 965–978. [Google Scholar] [CrossRef] [PubMed]
- El-Moukaddem, F.; Torng, E.; Xing, G.; Kulkarni, S. Mobile relay configuration in data-intensive Wireless Sensor Networks. In Proceedings of the IEEE 6th International Conference on Mobile Adhoc and Sensor Systems, Macau, China, 12–15 October 2009; pp. 80–89. [Google Scholar]
- Zhang, Z.; Jung, T.P.; Makeig, S.; Rao, B.D. Compressed sensing for energy-efficient wireless telemonitoring of noninvasive fetal ECG via block sparse Bayesian learning. IEEE Trans. Biomed. Eng. 2013, 60, 300–309. [Google Scholar] [CrossRef] [PubMed]
- Castaño, F.; Rossi, A.; Sevaux, M.; Velasco, N. An exact approach to extend network lifetime in a general class of wireless sensor networks. Inf. Sci. 2018, 433–434, 274–291. [Google Scholar] [CrossRef]
- Carrabs, F.; Cerulli, R.; D’Ambrosio, C.; Raiconi, A. Extending lifetime through partial coverage and roles allocation in connectivity-constrained sensor networks. IFAC PapersOnLine 2016, 49, 973–978. [Google Scholar] [CrossRef]
- Idrees, A.K.; Deschinkel, K.; Salomon, M.; Couturier, R. Multiround distributed lifetime coverage optimization protocol in wireless sensor networks. J. Supercomput. 2017, 74, 1949–1972. [Google Scholar] [CrossRef]
- Carrabs, F.; Cerrone, C.; D’Ambrosio, C.; Raiconi, A. Column generation embedding carousel greedy for the maximum network lifetime problem with interference constraints. In Proceedings of the International Conference on Optimization and Decision Science, Sorrento, Italy, 4–7 September 2017; pp. 151–159. [Google Scholar]
- Rahat, A.A.M.; Everson, R.M.; Fieldsend, J.E. Evolutionary Multi-Path Routing for Network Lifetime and Robustness in Wireless Sensor Networks. Ad Hoc Netw. 2016, 52, 130–145. [Google Scholar] [CrossRef]
- Tan, Y.K.; Panda, S.K. Optimized wind energy harvesting system using resistance emulator and active rectifier for wireless sensor nodes. IEEE Trans. Power Electron. 2010, 26, 38–50. [Google Scholar]
- Abbaspour, R. A practical approach to powering wireless sensor nodes by harvesting energy from heat flow in room temperature. In Proceedings of the International Congress on Ultra Modern Telecommunications and Control Systems and Workshops, Moscow, Russia, 18–20 October 2010; pp. 178–181. [Google Scholar]
- Tan, Y.K.; Panda, S.K. Energy harvesting from hybrid indoor ambient light and thermal energy sources for enhanced performance of wireless sensor nodes. IEEE Trans. Ind. Electron. 2011, 58, 4424–4435. [Google Scholar] [CrossRef]
- Abbas, M.M.; Tawhid, M.A.; Saleem, K.; Muhammad, Z.; Saqib, N.A.; Malik, H. Solar energy harvesting and management in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2014, 10, 436107. [Google Scholar] [CrossRef]
- Zhi, W.S.; Shuttleworth, R.; Alexander, M.J.; Grieve, B.D. Compact patch antenna design for outdoor RF energy harvesting in wireless sensor networks. Prog. Electroma. Res. 2010, 4, 273–294. [Google Scholar]
- Chen, T.; Zhu, Y.; Wang, N.; Chen, J.J.; Gong, T.C.; Wen, Y.M. Laser active power supply system for wireless sensor networks. Transducer Microsyst. Technol. 2012, 11, 91–93. [Google Scholar]
- Wang, G.; Liu, W.; Sivaprakasam, M.; Humayun, M.S.; Weiland, J.D. Power supply topologies for biphasic stimulation in inductively powered implants. In Proceedings of the IEEE International Symposium on Circuits and Systems, Kobe, Japan, 23–26 May 2005; pp. 2743–2746. [Google Scholar]
- He, S.; Chen, J.; Jiang, F.; Yau, D.K.Y.; Xing, G.; Sun, Y. Energy provisioning in wireless rechargeable sensor networks. In Proceedings of the IEEE INFOCOM, Shanghai, China, 10–15 April 2011; pp. 2006–2014. [Google Scholar]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljacic, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Sample, A.P.; Meyer, D.T.; Smith, J.R. Analysis, experimental results, and range adaptation of magnetically coupled resonators for wireless power transfer. IEEE Trans. Ind. Electron. 2011, 58, 544–554. [Google Scholar] [CrossRef]
- Jakobsen, M.K.; Madsen, J.; Hansen, M.R. DEHAR: A distributed energy harvesting aware routing algorithm for ad-hoc multi-hop wireless sensor networks. In Proceedings of the IEEE International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Montrreal, QC, Canada, 14–17 June 2010; pp. 1–9. [Google Scholar]
- Yoon, I.; Dong, K.N.; Shin, H. Energy-aware hierarchical topology control for wireless sensor networks with energy-harvesting nodes. Int. J. Distrib. Sens. Netw. 2015, 11, 617383. [Google Scholar] [CrossRef]
- Gong, P.; Xu, Q.; Chen, T.M. Energy Harvesting Aware routing protocol for wireless sensor networks. In Proceedings of the 9th International Symposium on Communication Systems, Networks & Digital Signal Processing, Manchester, UK, 23–25 July 2014; pp. 171–176. [Google Scholar]
- Meng, J.; Zhang, X.; Dong, Y.; Lin, X. Adaptive energy-harvesting aware clustering routing protocol for Wireless Sensor Networks. In Proceedings of the 7th International ICST Conference on Communications and Networking in China, Kunming, China, 8–10 August 2012; pp. 742–747. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Sherali, H.D. Making sensor networks immortal: An energy-renewal approach with wireless power transfer. IEEE/ACM Trans. Netw. 2012, 20, 1748–1761. [Google Scholar] [CrossRef]
- Shi, Y.; Xie, L.; Hou, Y.T.; Sherali, H.D. On renewable sensor networks with wireless energy transfer. In Proceedings of the IEEE INFOCOM, Shanghai, China, 10–15 April 2011; pp. 1350–1358. [Google Scholar]
- Peng, Y.; Li, Z.; Zhang, W.; Qiao, D. Prolonging Sensor Network Lifetime through Wireless Charging. In Proceedings of the IEEE 31th Real-time Systems Symposium, San Diego, CA, USA, 30 November–3 December 2010; pp. 129–139. [Google Scholar]
- Wang, J.; Si, T.; Wu, X.; Hu, X.; Yang, Y. Sustaining a perpetual wireless sensor network by multiple on-demand mobile wireless chargers. In Proceedings of the IEEE 12th International Conference on Networking, Sensing and Control, Taipei, Taiwan, 9–11 April 2015. [Google Scholar]
- Jiang, C.; Liu, J.; Wang, T.; Liang, J.; Li, T. High performance energy replenishment strategies in rechargeable sensor networks. J. Chin. Comput. Syst. 2017, 38, 786–790. [Google Scholar]
- Yetgin, H.; Cheung, K.T.K.; El-Hajjar, M.; Hanzo, L.H. A Survey of Network Lifetime Maximization Techniques in Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2017, 19, 828–854. [Google Scholar] [CrossRef]
- Bouabdallah, F.; Bouabdallah, N.; Boutaba, R. On balancing energy consumption in wireless sensor networks. IEEE Trans. Veh. Technol. 2013, 58, 2909–2924. [Google Scholar] [CrossRef]
- Lian, J.; Naik, K.; Agnew, G.B. Data capacity improvement of wireless sensor networks using non-uniform sensor distribution. Int. J. Distrib. Sens. Netw. 2006, 2, 121–145. [Google Scholar] [CrossRef]
- Cheng, H.; Yun, W. Minimizing the number of mobile chargers in a large-scale wireless rechargeable sensor network. In Proceedings of the IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 9–12 March 2015; pp. 1297–1302. [Google Scholar]
- Hu, C.; Wang, Y. Schedulability decision of charging missions in wireless rechargeable sensor networks. In Proceedings of the 2014 Eleventh Annual IEEE International Conference on Sensing, Communication, and Networking, Singapore, 30 June–3 July 2014; pp. 450–458. [Google Scholar]
- Wang, J.; Wu, X.M.; Xu, X.L.; Yang, Y.C.; Hu, X.M. Programming wireless recharging for target-oriented rechargeable sensor networks. In Proceedings of the IEEE 11th International Conference on Networking, Sensing and Control, Miami, FL, USA, 7–9 April 2014; pp. 367–371. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Notation | Value |
|---|---|---|
| Simulation area | ||
| Network size Nodal original energy | ||
| Maximum communication range Data rate | ||
| Buffer size | ||
| Sink | ||
| Charging rate Charging duration Fusion index Harmonic coefficient Flight velocity of mobile charger |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, L.; Cai, J.; Yan, J.; Zhou, Z. Joint Energy Supply and Routing Path Selection for Rechargeable Wireless Sensor Networks. Sensors 2018, 18, 1962. https://doi.org/10.3390/s18061962
Tang L, Cai J, Yan J, Zhou Z. Joint Energy Supply and Routing Path Selection for Rechargeable Wireless Sensor Networks. Sensors. 2018; 18(6):1962. https://doi.org/10.3390/s18061962
Chicago/Turabian StyleTang, Liangrui, Jinqi Cai, Jiangyu Yan, and Zhenyu Zhou. 2018. "Joint Energy Supply and Routing Path Selection for Rechargeable Wireless Sensor Networks" Sensors 18, no. 6: 1962. https://doi.org/10.3390/s18061962
APA StyleTang, L., Cai, J., Yan, J., & Zhou, Z. (2018). Joint Energy Supply and Routing Path Selection for Rechargeable Wireless Sensor Networks. Sensors, 18(6), 1962. https://doi.org/10.3390/s18061962