In-Process Monitoring of Lack of Fusion in Ultra-Thin Sheets Edge Welding Using Machine Vision


Abstract
:1. Introduction
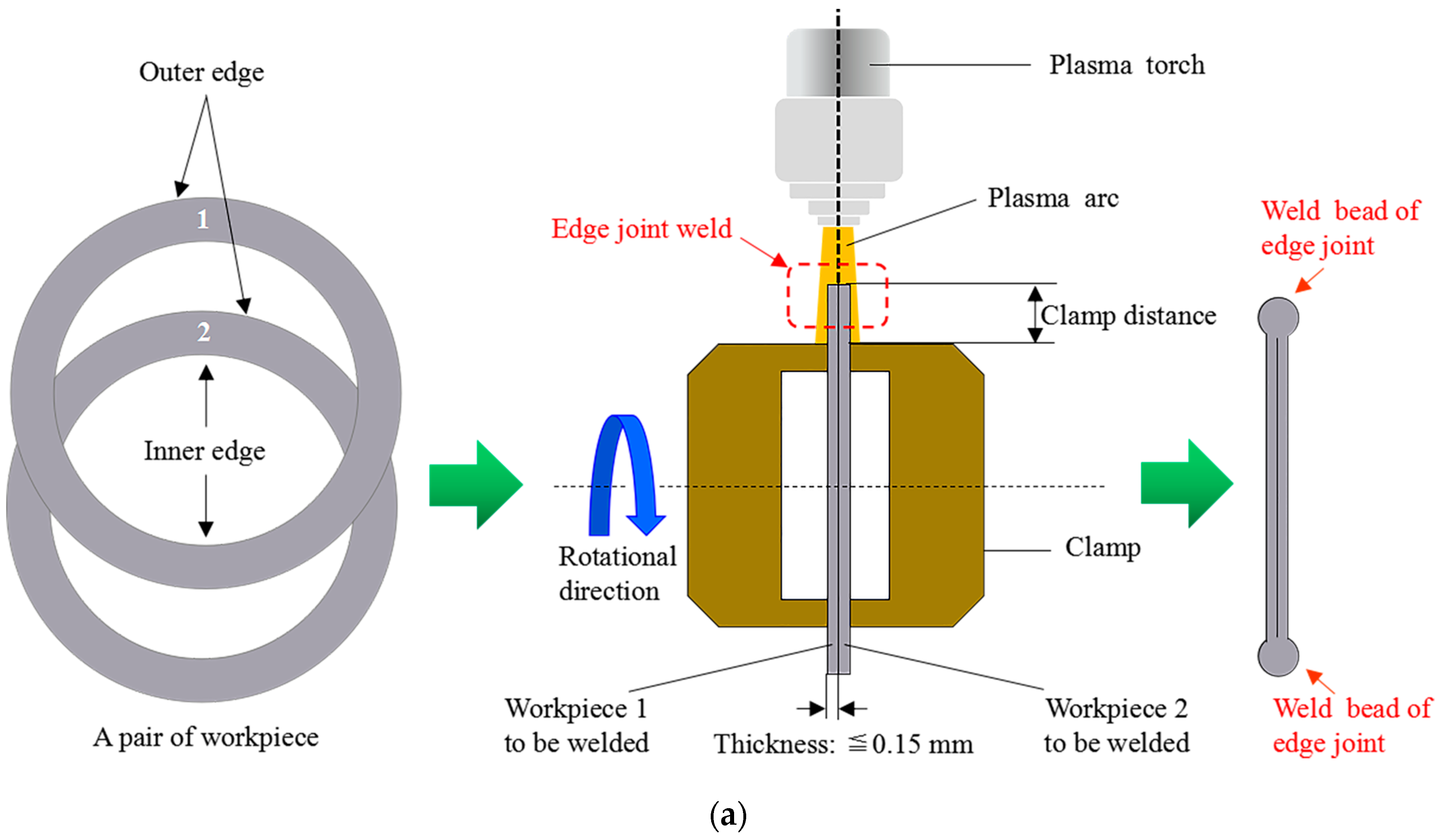
2. Experimental Method and Setup
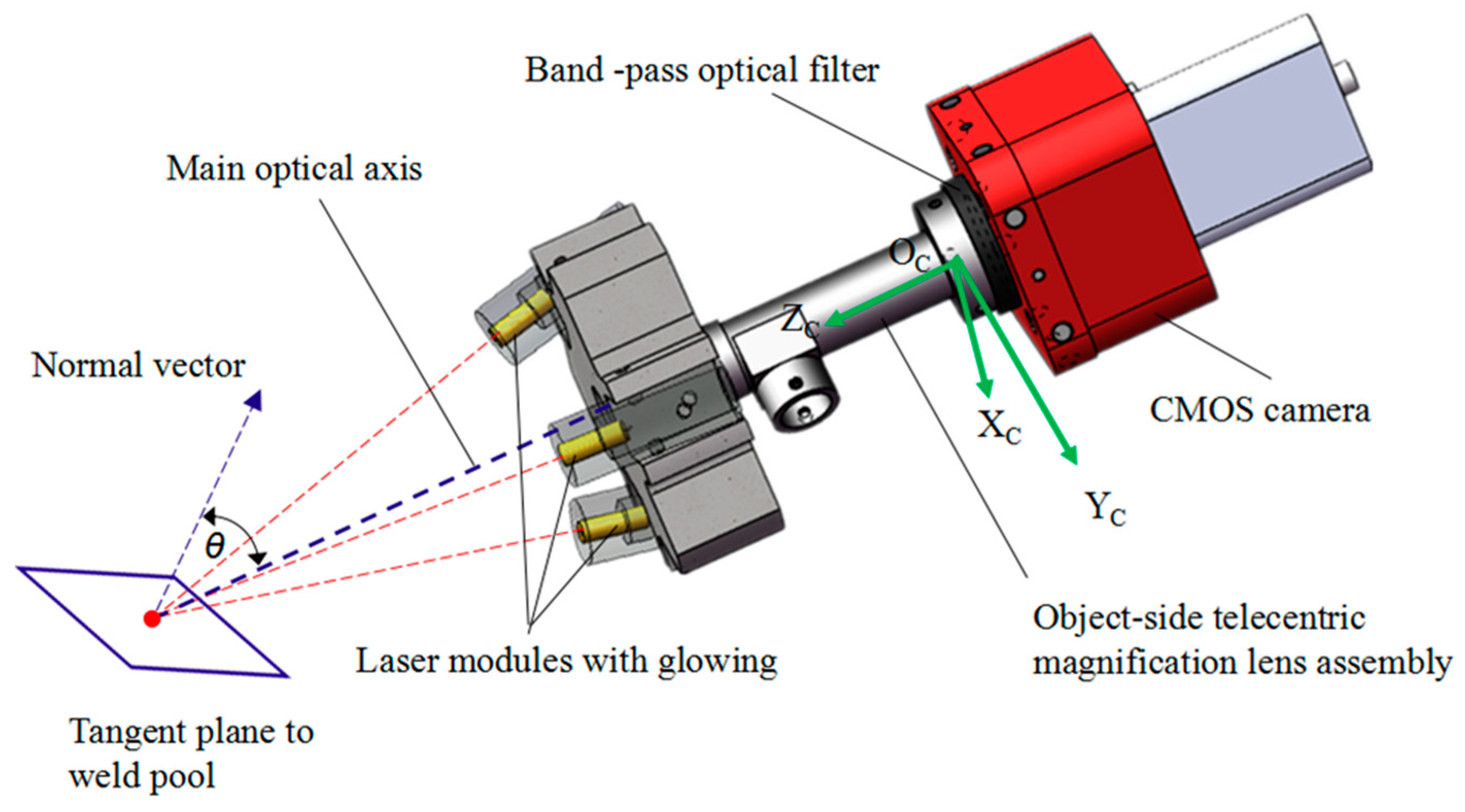
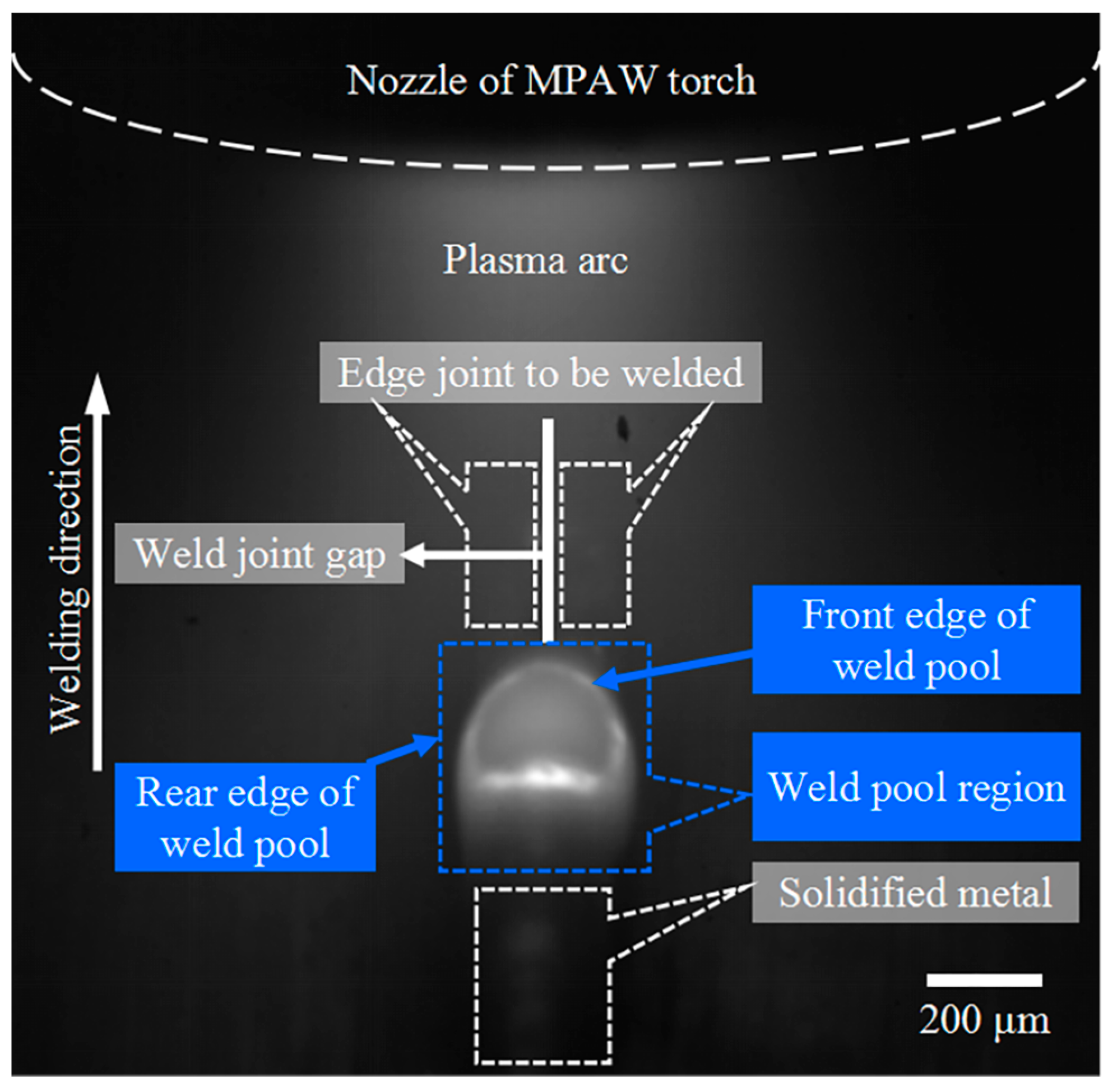
2.1. Vision Sensing of Weld Pool
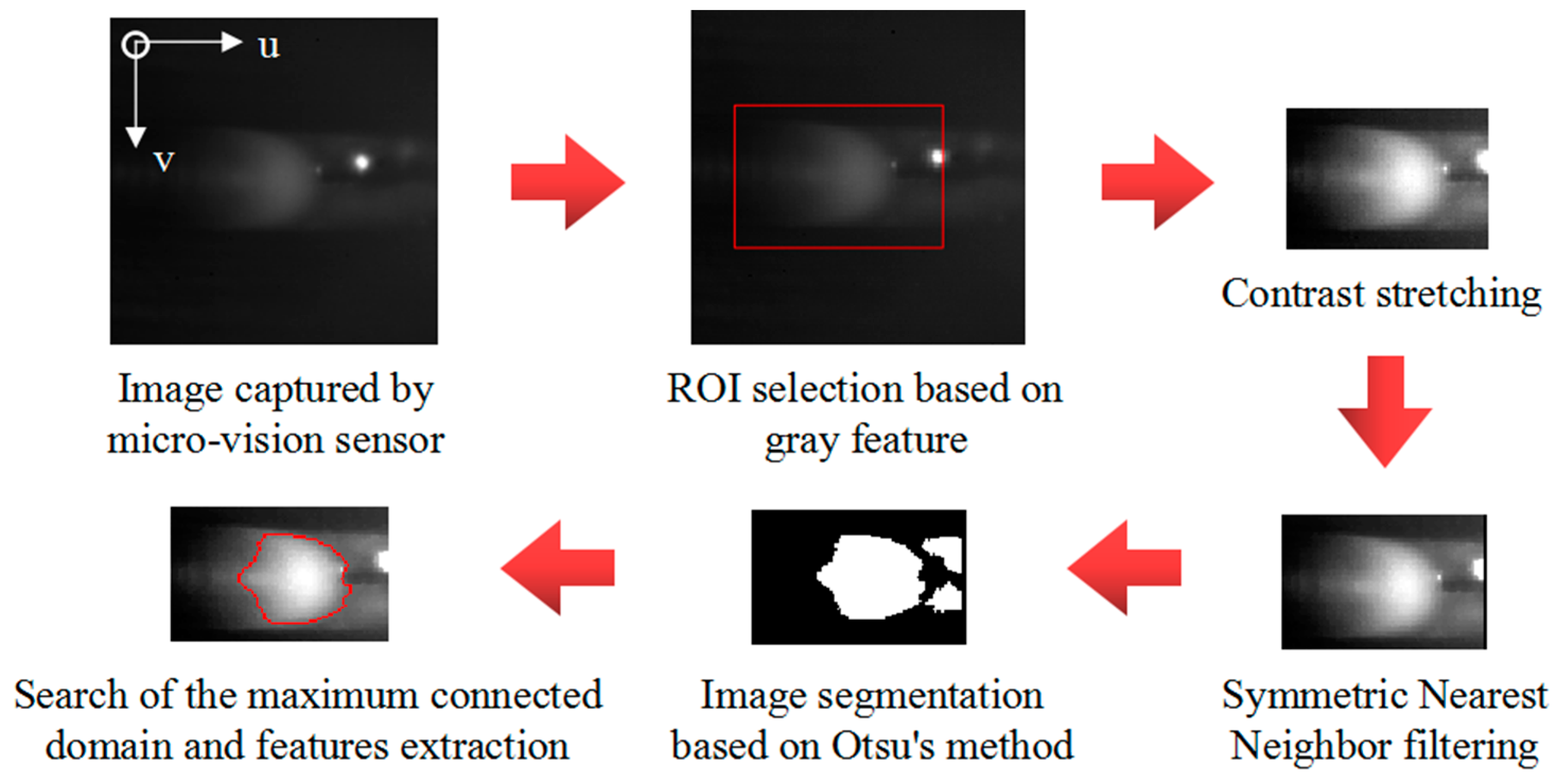
2.2. Features Extraction of Weld Pool by Image Processing
- Selection of the region of interest (ROI). The sums of intensity values in sliding windows within the image I1(u,v) are calculated. The window that has the maximum sum is selected as the ROI, so that it can include the entire weld pool region. The ROI can help to exclude part of arc and spatter as well as reduce the computational effort. Denote the ROI as R1(u,v).
- Contrast stretching. The operation saturates the bottom 1% and the top 1% of all pixel values, and it maps other pixel values linearly.
- Noise reduction with the SNNF. The SNNF [48] is a two-dimensional (2D) nonlinear filter that reduces noise while at the same time preserving edge content. This algorithm uses both spatial and nearest-neighbor constraints on image pixels to smooth an image. It is simple, fast, and good at preserving weld pool contour in images. The image after noise reduction is denoted as N1(u,v).
- Image segmentation with Otsu’s method. Otsu’s method [49] calculates the optimum threshold separating the image into the foreground and the background so that their intra-class variance is minimal. After image segmentation, the weld pool belongs to the foreground.
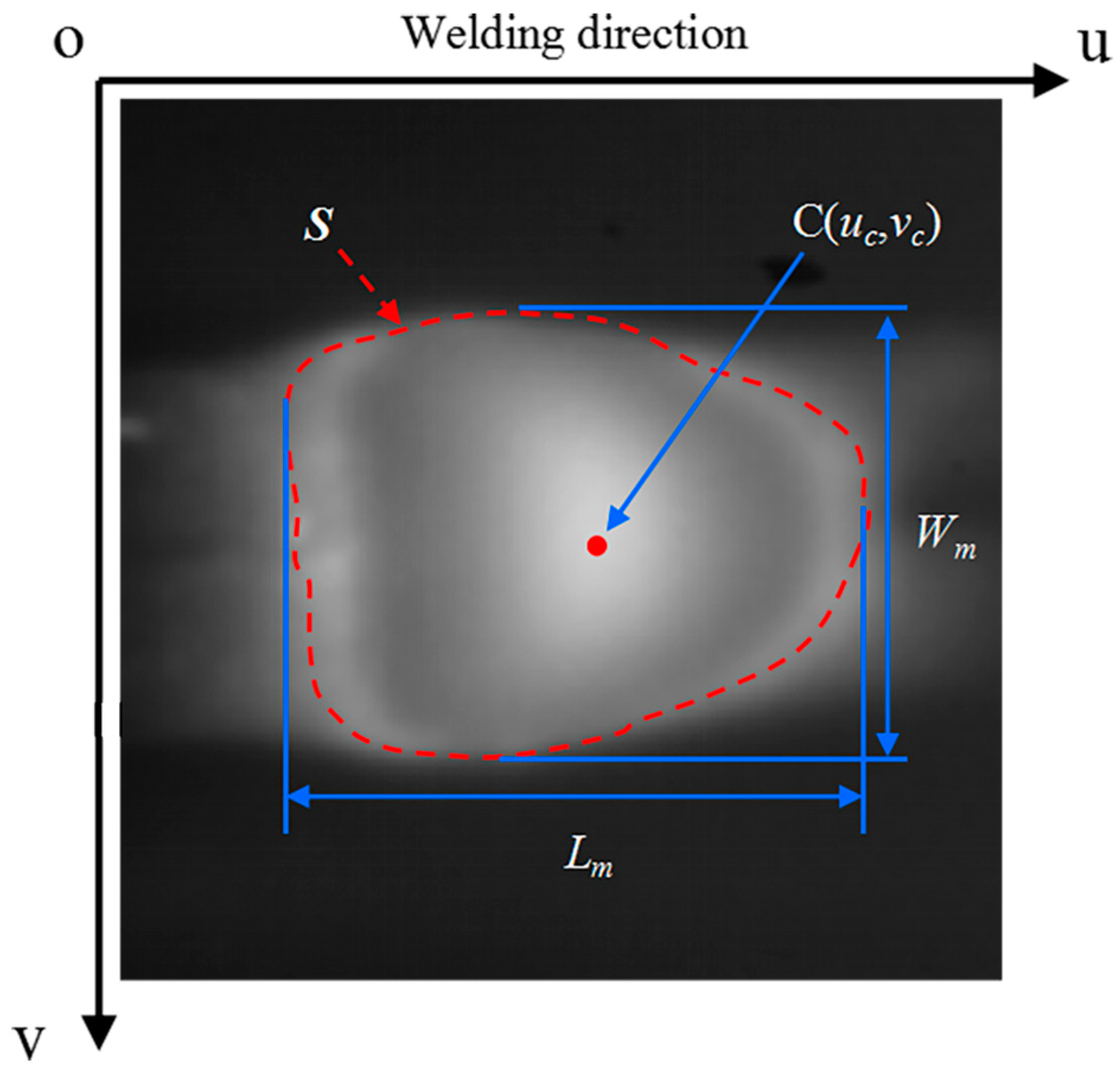
- Search of the maximum connected domain, namely S. As a result, the weld pool can be identified.
- Extraction of the weld pool contour and features.
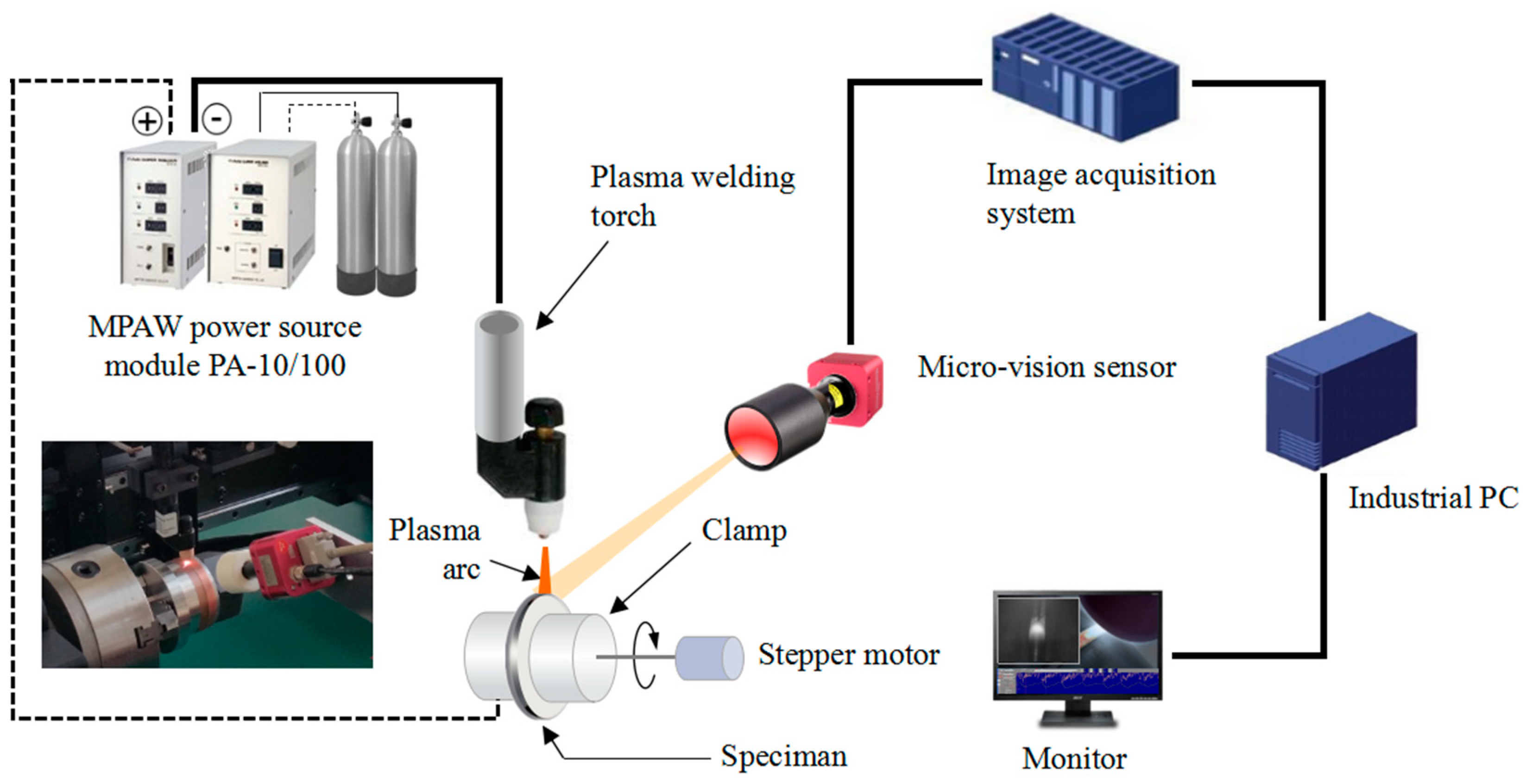
2.3. Experiment System
3. Experimental Results and Discussion
4. Conclusions
- (1)
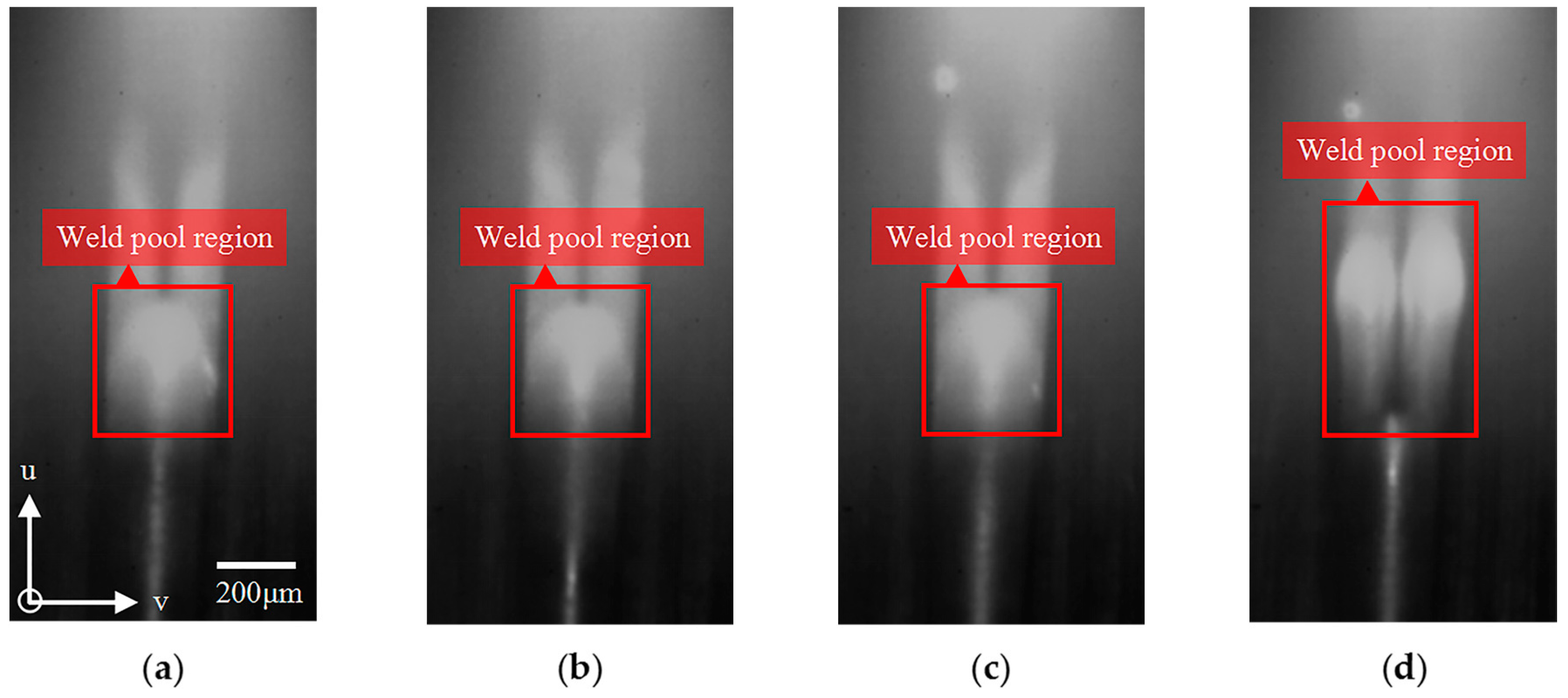
- The developed micro-vision sensing system can overcome the strong arc disturbance and the trade-off between optical magnification and depth of field. Thus, the morphology of mesoscale weld pool and its tiny dynamic variations can be successfully observed and stably monitored in MPAW of ultra-thin sheets edge welds, which are crucial for reliable process monitoring and defects detection. The resolution of the images is 6 μm/pixel by camera calibration.
- (2)
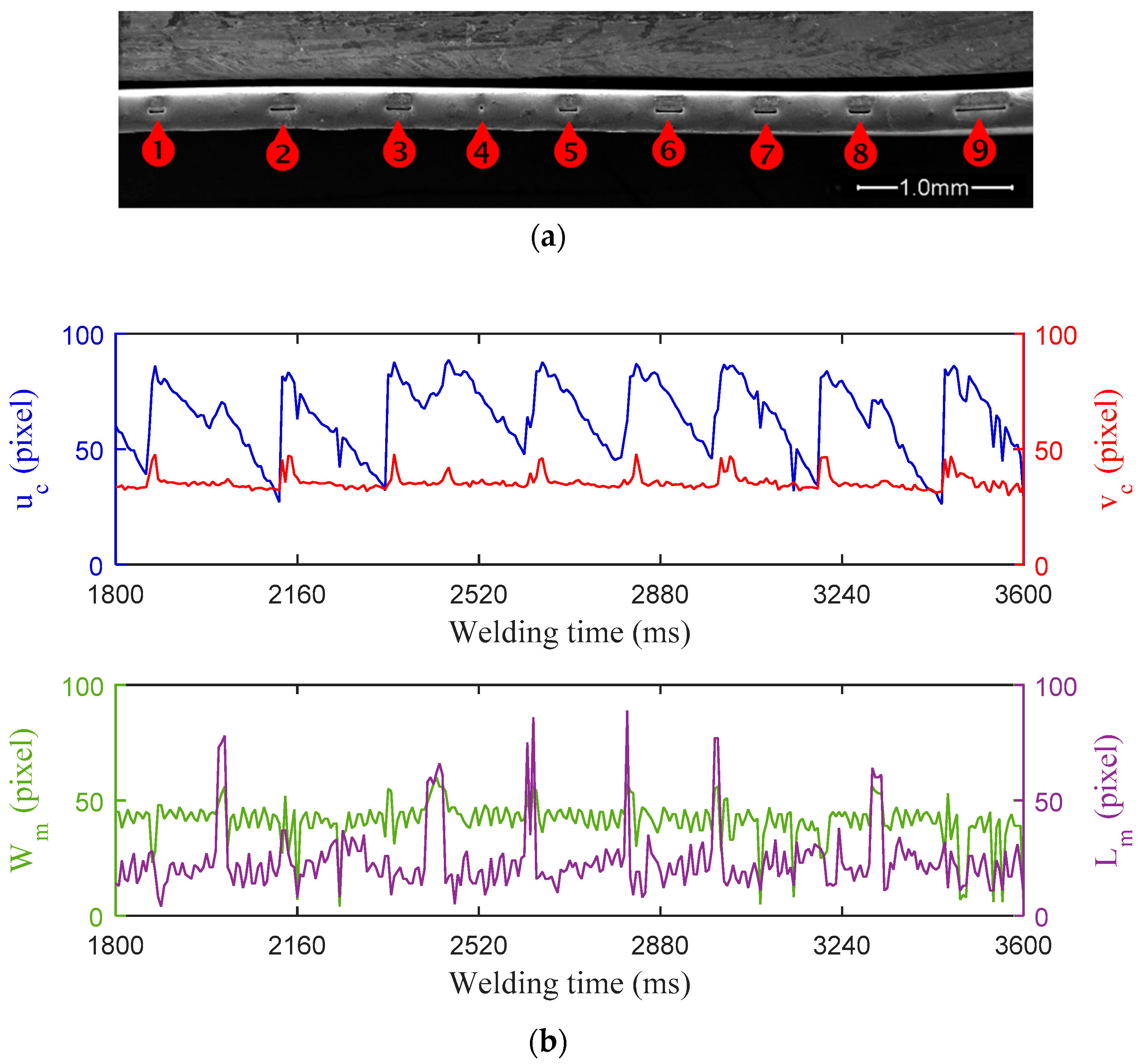
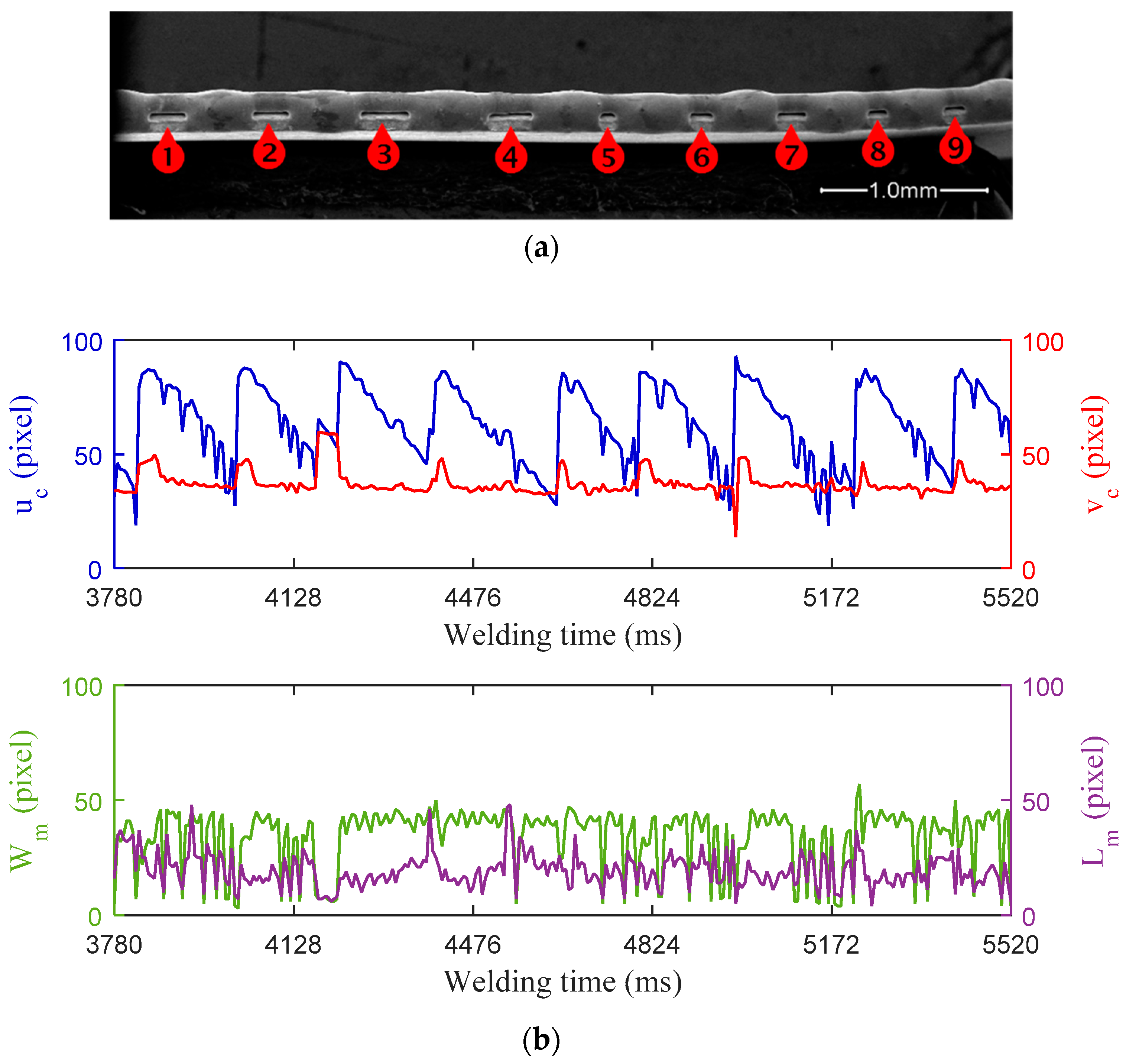
- The proposed image processing algorithm based on SNNF and Otsu’s method is applicable to effectively extract geometrical features from the acquired weld pool images, e.g., maximum width, maximum length, and centroid position of weld pool, which have close relationship with the weld bead formation and defects. The processing time is less than 10 ms per frame, which is enough to satisfy the demands for monitoring and detection in real time.
- (3)
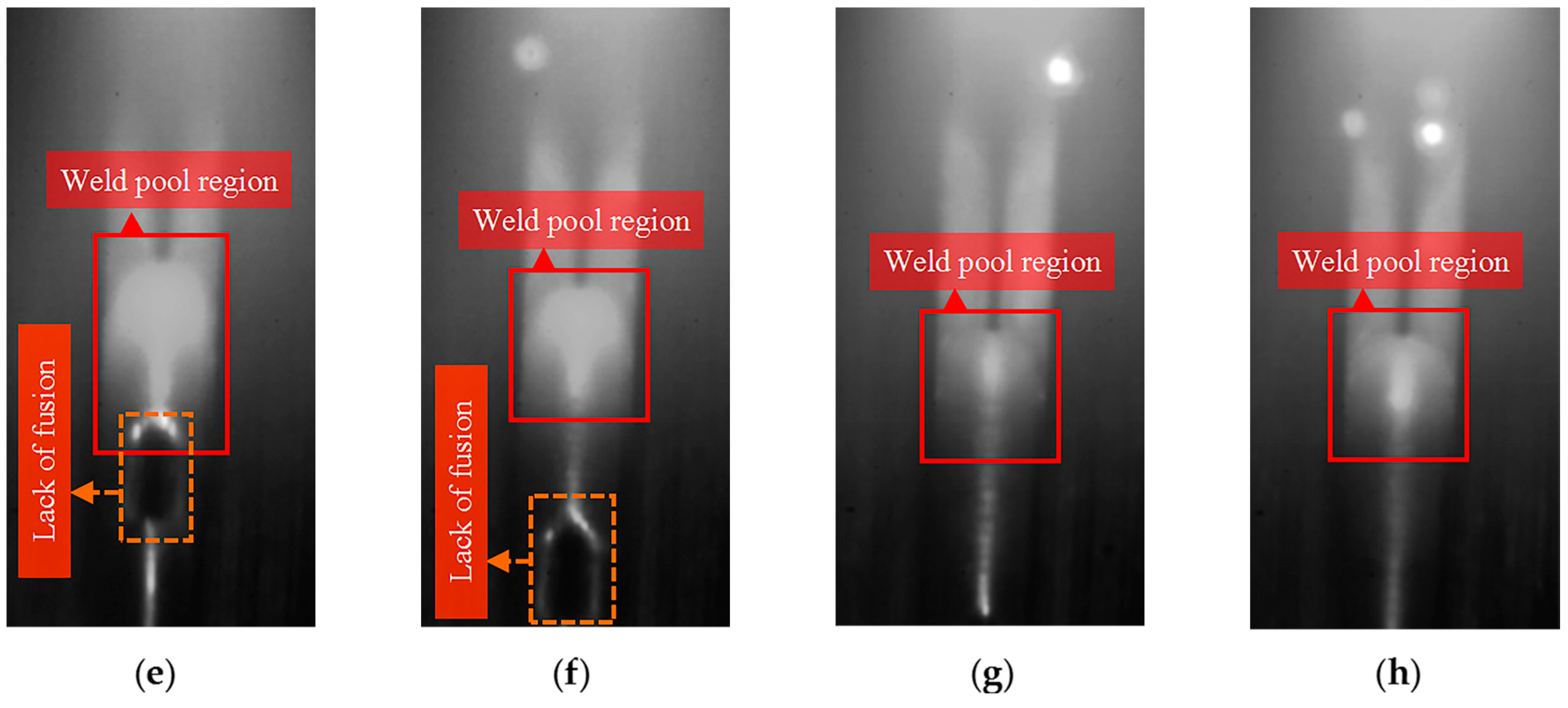
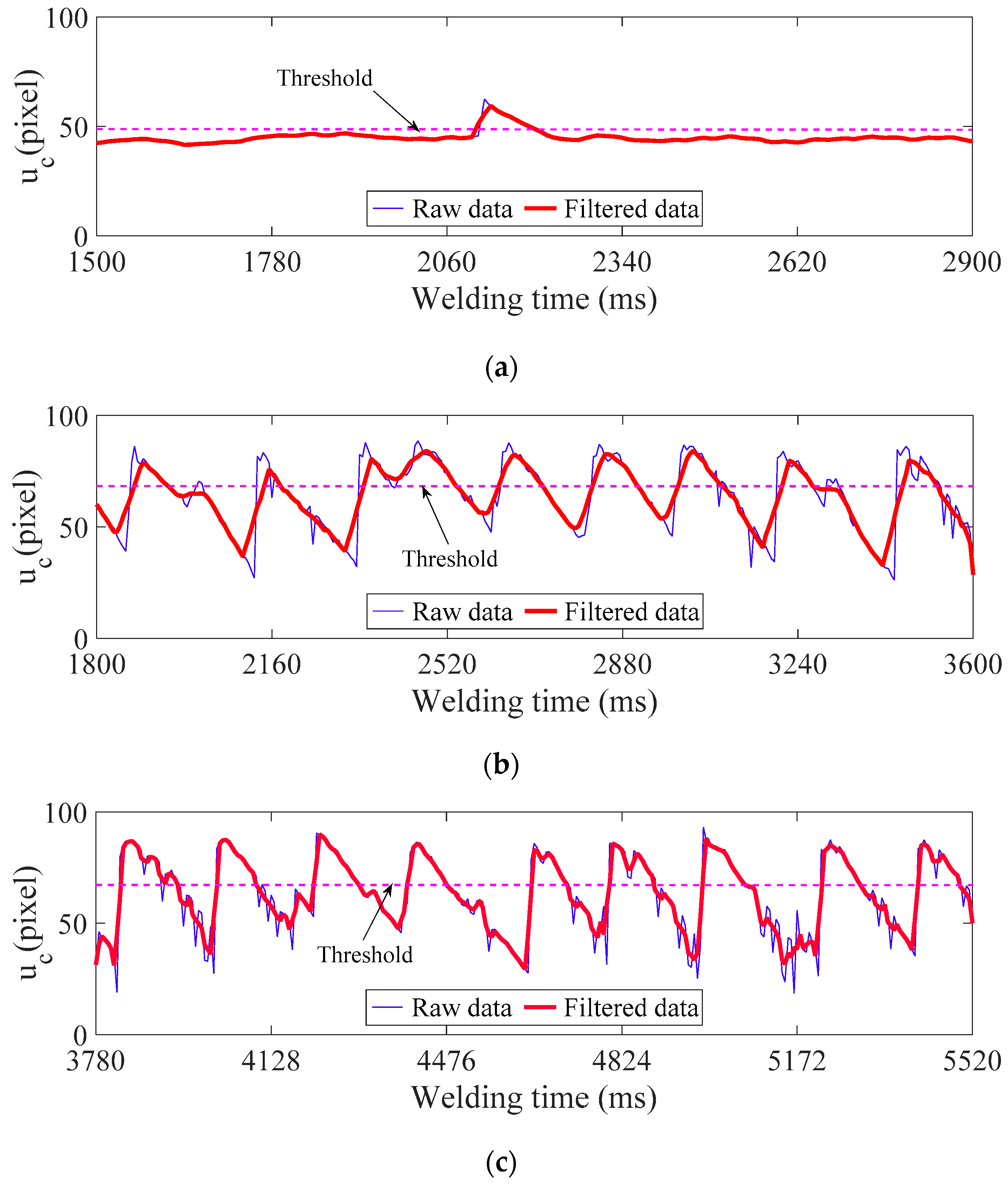
- The variations in extracted characteristic parameters during MPAW process show various degrees of sensitivity to the weld defect of lack of fusion. Particularly, the change in weld pool centroid position along weld length is found to be a promising indicator of the lack of fusion, as the fluctuation in u-coordinate of weld pool centroid (uc) shows obvious coincidence with the occurrence of the defects caused by various factors.
- (4)
- By using the characteristic parameters uc, the presences of lack of fusion defects in MPAW of ultra-thin sheets edge welds can be detected in real time. The proposed in-process monitoring method makes the early warning possible. It also can provide feedback for real-time control and can serve as a basis for the intelligent defect identification. It is expected to be applied in edge welding of precision metal parts and components in the industry of aircraft, aerospace, nuclear power, petrochemical, etc., and it is especially suitable for the welded bellows and micro pipelines.
Author Contributions
Funding
Conflicts of Interest
References
- Larsen, C.E. NASA Experience with pogo in human spaceflight vehicles. In Proceedings of the NATO RTO Symposium ATV-152 on Limit-Cycle Oscillations and Other Amplitude-Limited, Self-Excited Vibrations, Loen, Norway, 5–8 May 2008; pp. 1–23. [Google Scholar]
- Zhang, Z.; Wang, N.; Liu, Z.S. POGO reduction technology of Chinese manned launch vehicles. Sci. Sin. 2014, 5, 504–509. [Google Scholar]
- Wang, X.J.; Yu, Z.W.; Zhang, B.; Zhang, Q.S.; Pan, H. Progress of POGO suppression technology of launch vehicles at home and abroad. Sci. Sin. 2014, 5, 492–503. [Google Scholar]
- Tseng, K.H.; Hsieh, S.T.; Tseng, C.C. Effect of process parameters of micro-plasma arc welding on morphology and quality in stainless steel edge joint welds. Sci. Technol. Weld. Join. 2003, 8, 423–430. [Google Scholar] [CrossRef]
- Prasad, K.S.; Chalamalasetti, S.R.; Damera, N.R. Application of grey relational analysis for optimizing weld bead geometry parameters of pulsed current micro plasma arc welded inconel 625 sheets. Int. J. Adv. Manuf. Technol. 2015, 78, 625–632. [Google Scholar] [CrossRef]
- Batool, S.; Khan, M.; Jaffery, S.H.I.; Khan, A.; Mubashar, A.; Ali, L.; Khan, N.; Anwar, M.N. Analysis of weld characteristics of micro-plasma arc welding and tungsten inert gas welding of thin stainless steel (304L) sheet. J. Mater. Des. Appl. 2015, 230, 1005–1017. [Google Scholar]
- Ren, M.; Wang, C.; Tian, X.; Zhao, J. Micro-plasma arc welding manufacturing technology of bellows. Weld. Join. 2012, 7, 51–54. [Google Scholar]
- Park, M.C.; Son, J.Y. 3D display and image processing system for metal bellows welding. In Proceedings of the Conference on Three-Dimensional Imaging, Visualization, and Display 2010 and Display Technologies and Applications for Defence, Security, and Avionics, Orlando, FL, USA, 6–8 April 2010; Volume 7690, pp. 158–160. [Google Scholar]
- Park, M.C.; Byun, Y.T.; Kim, D.W. Use of support vector machines for defect detection in metal bellows welding. J. Korea Soc. Comput. Inf. 2015, 20, 11–20. [Google Scholar] [CrossRef]
- Norman, P.; Engström, H.; Kaplan, A.F.H. State-of-the-art of monitoring and imaging of laser welding defects. In Proceedings of the 11th NOLAMP Conference in Laser Processing of Materials, Luleå, Sweden, 20–22 August 2007. [Google Scholar]
- Zou, Y.; Du, D.; Chang, B.; Ji, L.; Pan, J. Automatic weld defect detection method based on Kalman filtering for real-time radiographic inspection of spiral pipe. NDT E Int. 2015, 72, 1–9. [Google Scholar] [CrossRef]
- Shao, J.; Du, D.; Chang, B.; Shi, H. Automatic weld defect detection based on potential defect tracking in real-time radiographic image sequence. NDT E Int. 2012, 46, 14–21. [Google Scholar] [CrossRef]
- Shao, J.; Du, D.; Chang, B.; Shi, H. Automatic weld recognition and extraction from real-time X-ray images using quadratic curve fitting and multi-order differences analysis of intensity profile. Insight 2011, 53, 562–569. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, X.; Chen, H.; Zhong, J.; Chen, S. Online welding quality monitoring based on feature extraction of arc voltage signal. Int. J. Adv. Manuf. Technol. 2014, 70, 1661–1671. [Google Scholar] [CrossRef]
- Chen, B.; Feng, J. Multisensor information fusion of pulsed GTAW based on improved D-S evidence theory. Int. J. Adv. Manuf. Technol. 2014, 71, 91–99. [Google Scholar] [CrossRef]
- Horvat, J.; Prezelj, J.; Polajnar, I.; Čudina, M. Monitoring gas metal arc welding process by using audible sound signal. Stroj. Vestnik-J. Mech. Eng. 2011, 57, 267–278. [Google Scholar] [CrossRef]
- Cocota, J.A.N.; Garcia, G.C.; Costa, A.R.D.; Lima, M.S.F.D.; Rocha, F.A.S.; Freitas, G.M. Discontinuity detection in the shield metal arc welding process. Sensors 2017, 17, 1082. [Google Scholar] [CrossRef] [PubMed]
- Alfaro, S.C.A.; Cayo, E.H. Sensoring fusion data from the optic and acoustic emissions of electric arcs in the GMAW-S process for welding quality assessment. Sensors 2012, 12, 6953–6966. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, J.; Sheng, H.; Zhou, X. Study on the application of acoustic emission testing technique in monitoring 16Mn steel welding defects. In Proceedings of the 2016 IEEE International Conference on Advanced Mechatronic Systems, Melbourne, Australia, 30 Novermber 2016; pp. 318–321. [Google Scholar]
- Ancona, A.; Spagnolo, V.; Lugarà, P.M.; Ferrara, M. Optical sensor for real-time monitoring of CO2 laser welding process. Appl. Opt. 2001, 40, 6019–6025. [Google Scholar] [CrossRef] [PubMed]
- Sibillano, T.; Ancona, A.; Berardi, V.; Lugarà, M.P. A real-time spectroscopic sensor for monitoring laser welding processes. Sensors 2009, 9, 3376–3385. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Yu, H.; Lv, N.; Chen, S. Real-time defect detection in pulsed GTAW of Al alloys through on-line spectroscopy. J. Mater. Process. Technol. 2013, 213, 1146–1156. [Google Scholar] [CrossRef]
- Alfaro, S.C.A.; Díaz, F.F. Exploring infrared sensoring for real time welding defects monitoring in GTAW. Sensors 2010, 10, 5962–5974. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brock, C.; Tenner, F.; Klämpfl, F.; Hohenstein, R.; Schmidt, M. Detection of weld defects by high speed imaging of the vapor plume. Phys. Proced. 2013, 41, 532–536. [Google Scholar] [CrossRef]
- Wang, Z. Monitoring of GMAW weld pool from the reflected laser lines for real-time control. IEEE Trans. Ind. Inform. 2014, 10, 2073–2083. [Google Scholar] [CrossRef]
- Emilio, P.L.J.; Mauricio, S.T.M.J.; Crisostomo, A.A.S. Real-time measurement of width and height of weld beads in GMAW processes. Sensors 2016, 16, 1500. [Google Scholar]
- Zhang, G.; Yan, Z.; Lin, L. Reconstructing a three-dimensional P-GMAW weld pool shape from a two-dimensional visual image. Meas. Sci. Technol. 2006, 17, 1877–1882. [Google Scholar]
- Jiang, C.; Zhang, F.; Wang, Z. Image processing of aluminum alloy weld pool for robotic VPPAW based on visual sensing. IEEE Access. 2017, 5, 21567–21573. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, C.; Gao, J. Vision-based observation of keyhole geometry in plasma arc welding. Int. J. Therm. Sci. 2013, 63, 38–45. [Google Scholar] [CrossRef]
- Comas, T.F.; Diao, C.; Ding, J.; Williams, S.; Zhao, Y. A passive imaging system for geometry measurement for the plasma arc welding process. IEEE Trans. Ind. Electron. 2017, 64, 7201–7209. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, C.; Liu, X. Single vision system for simultaneous observation of keyhole and weld pool in plasma arc welding. J. Mater. Process. Technol. 2015, 215, 71–78. [Google Scholar] [CrossRef]
- Bardin, F.; Cobo, A.; Lopezhiguera, J.M.; Collin, O.; Aubry, P.; Dubois, T.; Högström, M.; Nylen, P.; Jonsson, P.; Jones, J.D.C.; et al. Optical techniques for real-time penetration monitoring for laser welding. Appl. Opt. 2005, 44, 3869–3876. [Google Scholar] [CrossRef] [PubMed]
- Luo, M.; Shin, Y.C. Vision-based weld pool boundary extraction and width measurement during keyhole fiber laser welding. Opt. Lasers Eng. 2015, 64, 5–70. [Google Scholar] [CrossRef]
- Harooni, M.; Carlson, B.; Kovacevic, R. Detection of defects in laser welding of AZ31B magnesium alloy in zero-gap lap joint configuration by a real-time spectroscopic analysis. Opt. Lasers Eng. 2014, 56, 54–66. [Google Scholar] [CrossRef]
- You, D.; Gao, X.; Katayama, S. A novel stability quantification for disk laser welding by using frequency correlation coefficient between multiple-optics signals. IEEE/ASME Trans. Mech. 2015, 20, 327–337. [Google Scholar] [CrossRef]
- You, D.; Gao, X.; Katayama, S. WPD-PCA-based laser welding process monitoring and defects diagnosis by using FNN and SVM. IEEE Trans. Ind. Electron. 2015, 62, 628–636. [Google Scholar] [CrossRef]
- You, D.; Gao, X.; Katayama, S. Multisensor fusion system for monitoring high-power disk laser welding using support vector machine. IEEE Trans. Ind. Inform. 2014, 10, 1285–1295. [Google Scholar]
- Bardin, F.; Mcbride, R.; Moore, A.; Morgan, S.; Williams, S.; Jones, J.D.C.; Hand, D.P. Real-time temperature measurement for process monitoring of laser conduction welding. In Proceedings of the 23rd International Congress on Applications of Laser and Electro-Optics, San Francisco, CA, USA, 4–7 October 2004; pp. 4–7. [Google Scholar]
- Richardson, R.W.; Gutow, D.A.; Anderson, R.A.; Farson, D.F. Coaxial arc weld pool viewing for process monitoring and control. Weld. J. 1984, 63, 43–50. [Google Scholar]
- Pietrzak, K.A.; Packer, S.M. Vision-based weld pool width control. J. Eng. Ind. 1994, 116, 86–92. [Google Scholar] [CrossRef]
- Kovacevic, R.; Zhang, Y.M.; Ruan, S. Sensing and control of weld pool geometry for automated GTA welding. J. Eng. Ind. 1995, 117, 210–222. [Google Scholar] [CrossRef]
- Fan, C.; Lv, F.L.; Chen, S. Visual sensing and penetration control in aluminum alloy pulsed GTA welding. Int. J. Adv. Manuf. Technol. 2009, 42, 126–137. [Google Scholar] [CrossRef]
- Zhang, W.J.; Liu, Y.K.; Zhang, Y.M. Real-time measurement of the weld pool surface in GTAW process. In Proceedings of the 2013 IEEE International Conference on Instrumentation and Measurement Technology, Minneapolis, MN, USA, 6–9 July 2013; pp. 1640–1645. [Google Scholar]
- Wang, Z. An Imaging and measurement system for robust reconstruction of weld pool during arc welding. IEEE Trans. Ind. Electron. 2015, 62, 5109–5118. [Google Scholar] [CrossRef]
- Wang, X.W. Three-dimensional vision applications in GTAW process modeling and control. Int. J. Adv. Manuf. Technol. 2015, 80, 1601–1611. [Google Scholar] [CrossRef]
- Chen, B.; Wang, J.; Chen, S. Prediction of pulsed GTAW penetration status based on BP neural network and D-S evidence theory information fusion. Int. J. Adv. Manuf. Technol. 2010, 48, 83–94. [Google Scholar] [CrossRef]
- Watanabe, M.; Nayar, S. Telecentric optics for computational vision. In Proceedings of the 4th European Conference on Computer Vision, Cambridge, UK, 14–18 April 1996; pp. 439–451. [Google Scholar]
- Harwood, D.; Subbarao, M.; Hakalahti, H.; Davis, L.S. A new class of edge-preserving smoothing filters. Pattern Recognit. Lett. 1987, 6, 155–162. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold selection method from gray-Level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Welding materials | 304 stainless steel diaphragms | Shielding gas | 99.99% pure argon |
| Type of welding seam | Edge joint | Shielding gas flow rate | 20.0 SCFH |
| Peak current | 3.0–5.0 A | Plasma gas | 99.99% pure argon |
| Base current | 1.5–2.5 A | Plasma gas flow rate | 0.4 L/min |
| Pulse rate | 0–100 pps | Clamp distance | 0.25 mm |
| pulse width | 50% | CTWD | 1.0 mm |
| Travel speed | 3.65–13.15 mm/s | Electrode diameter | 1.0 mm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, Y.; Chang, B.; Peng, G.; Yuan, Z.; Hou, X.; Xue, B.; Du, D. In-Process Monitoring of Lack of Fusion in Ultra-Thin Sheets Edge Welding Using Machine Vision. Sensors 2018, 18, 2411. https://doi.org/10.3390/s18082411
Hong Y, Chang B, Peng G, Yuan Z, Hou X, Xue B, Du D. In-Process Monitoring of Lack of Fusion in Ultra-Thin Sheets Edge Welding Using Machine Vision. Sensors. 2018; 18(8):2411. https://doi.org/10.3390/s18082411
Chicago/Turabian StyleHong, Yuxiang, Baohua Chang, Guodong Peng, Zhang Yuan, Xiangchun Hou, Boce Xue, and Dong Du. 2018. "In-Process Monitoring of Lack of Fusion in Ultra-Thin Sheets Edge Welding Using Machine Vision" Sensors 18, no. 8: 2411. https://doi.org/10.3390/s18082411
APA StyleHong, Y., Chang, B., Peng, G., Yuan, Z., Hou, X., Xue, B., & Du, D. (2018). In-Process Monitoring of Lack of Fusion in Ultra-Thin Sheets Edge Welding Using Machine Vision. Sensors, 18(8), 2411. https://doi.org/10.3390/s18082411