PRG: A Distance Measurement Algorithm Based on Phase Regeneration

Abstract
:1. Introduction
2. Principle of PRG
2.1. Phase Regeneration Ranging Algorithm
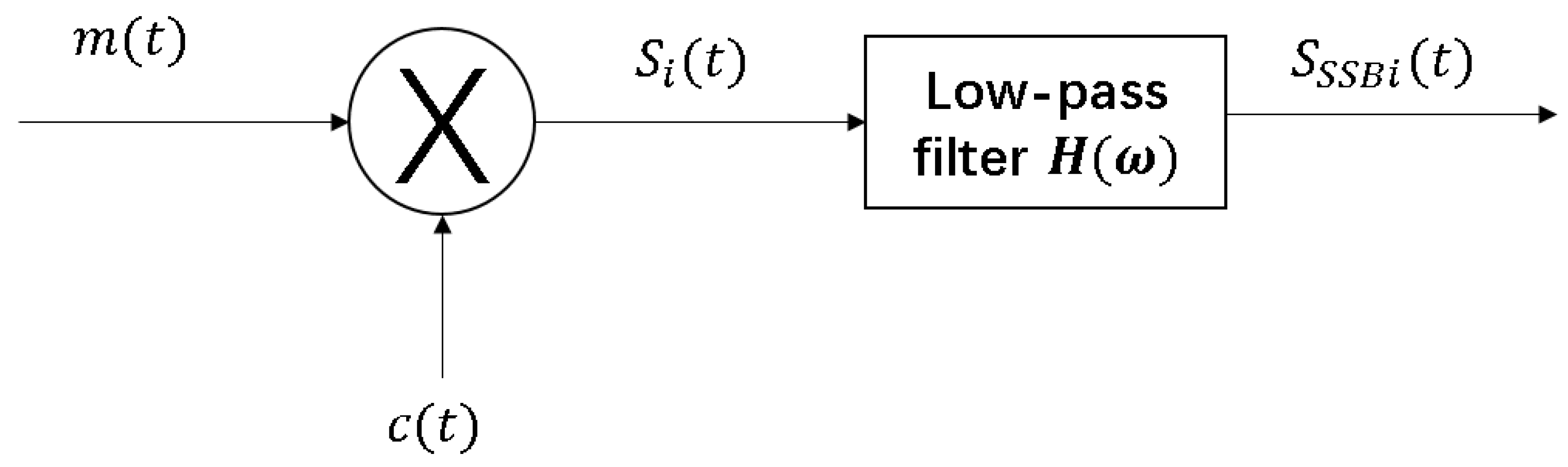
2.2. Range Finding Signal
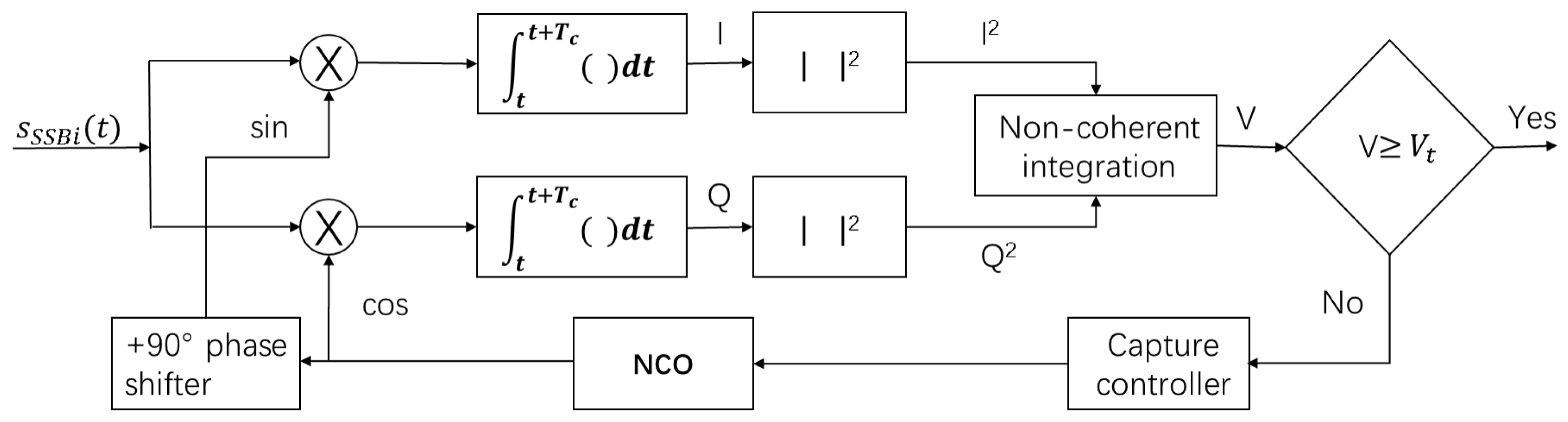
2.3. Range Finding Signal Acquisition
2.3.1. Search Scope
2.3.2. Signal Detection
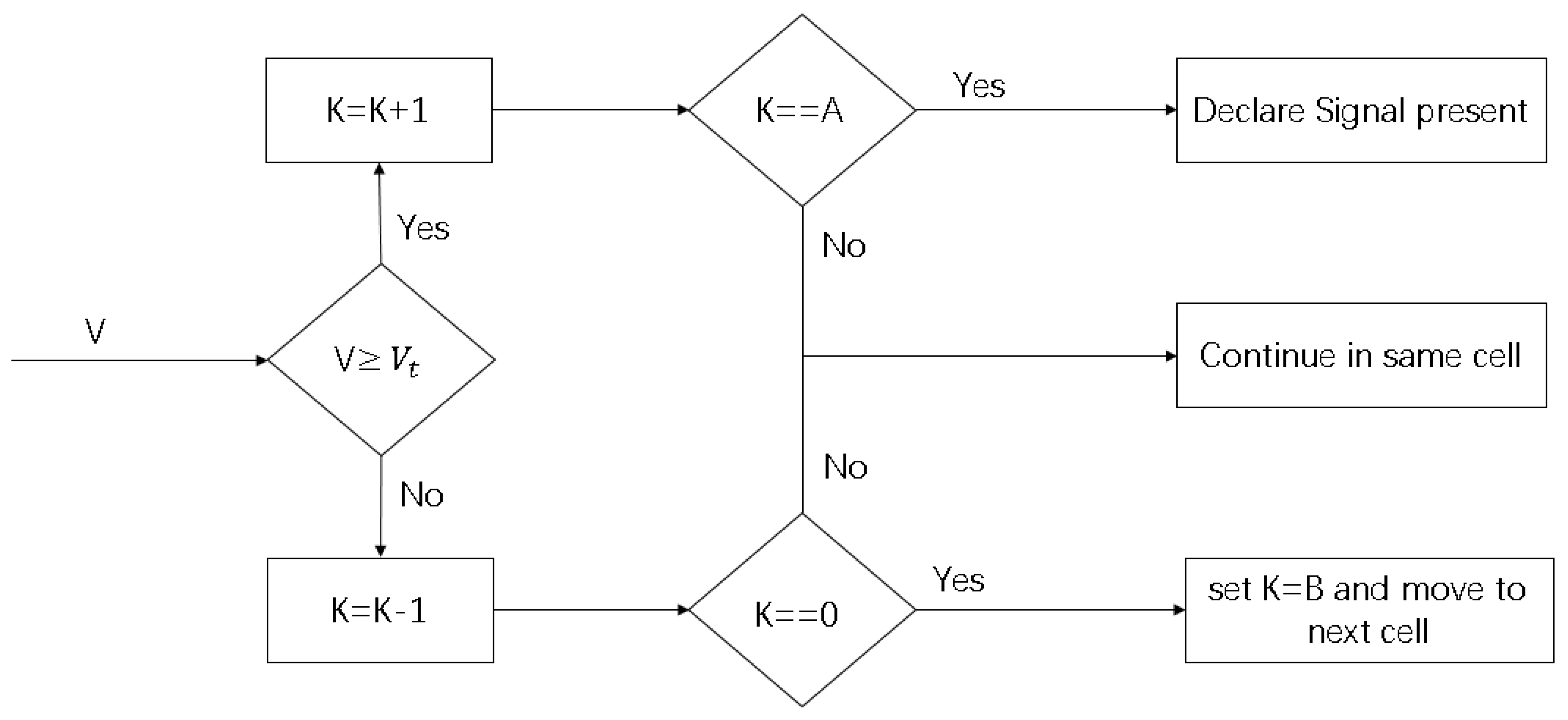
2.3.3. Search Algorithm
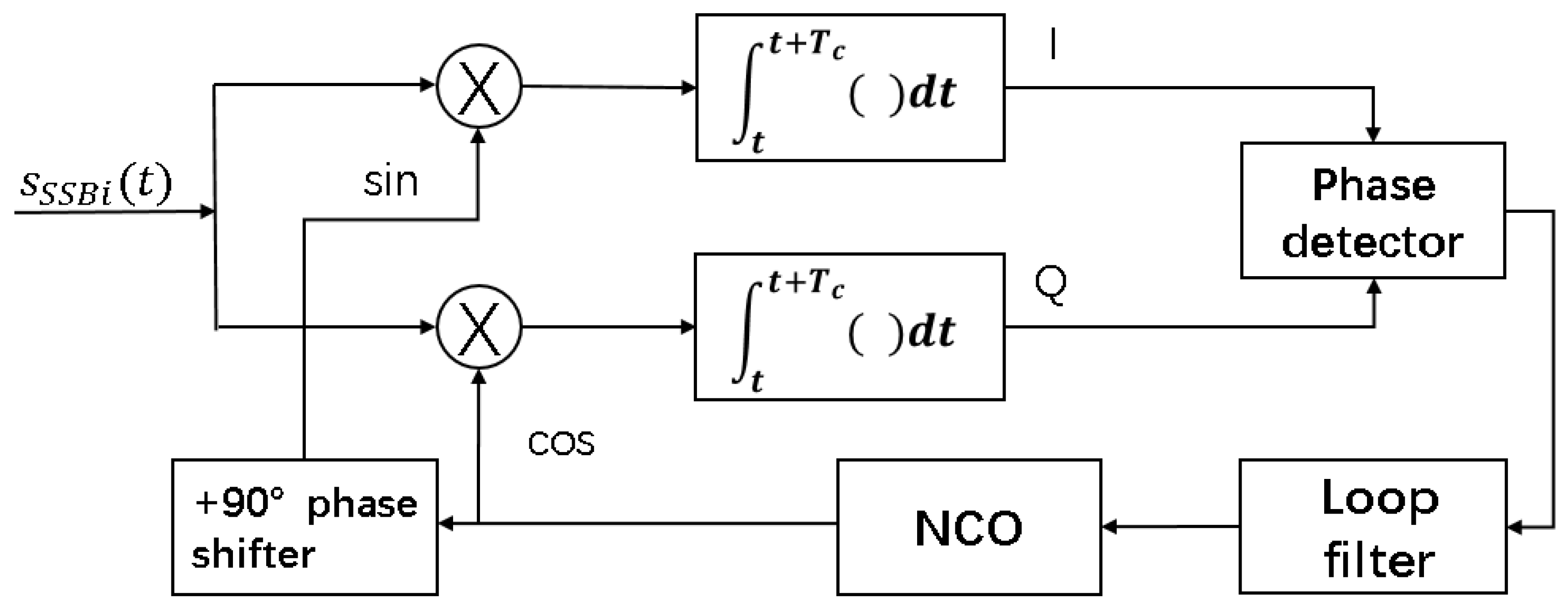
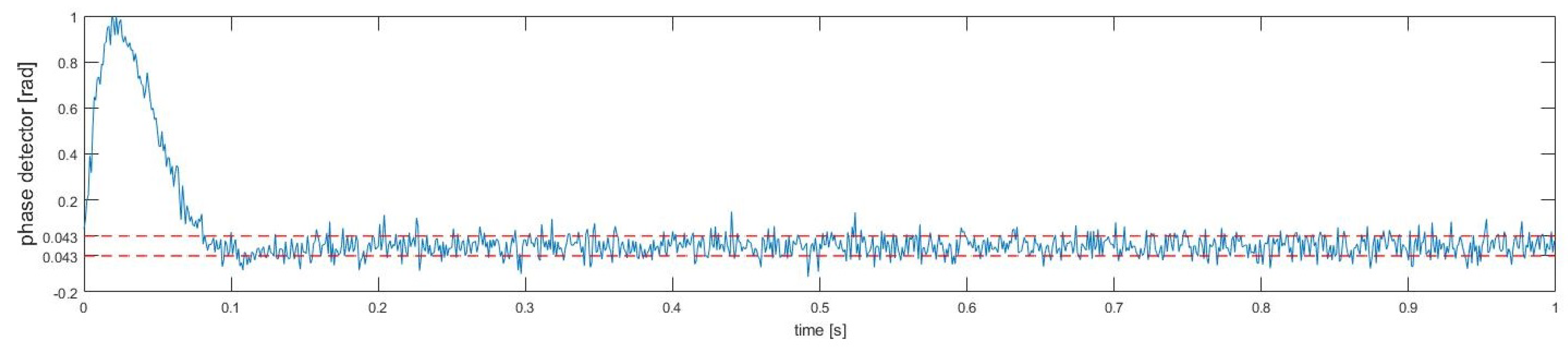
2.4. Range Signal Tracking
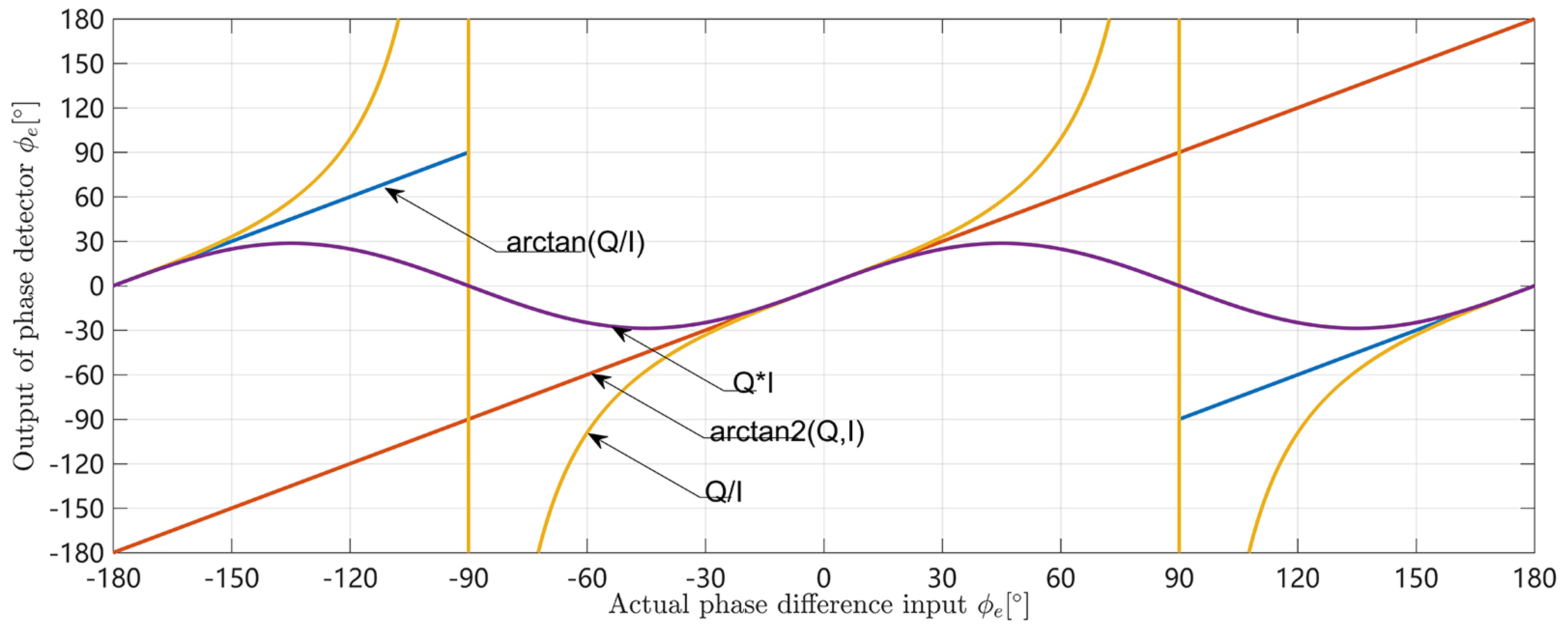
2.4.1. Phase Detector
- Two-quadrant arctangent function phase detector:
- Four-quadrant arctangent function phase detector:
- The third method uses the following:
- Classic Costas analog discriminator:
2.4.2. Loop Filter
2.4.3. Coherent Integration Time
2.5. Coarse Range Finding Method
3. Simulation and Analysis
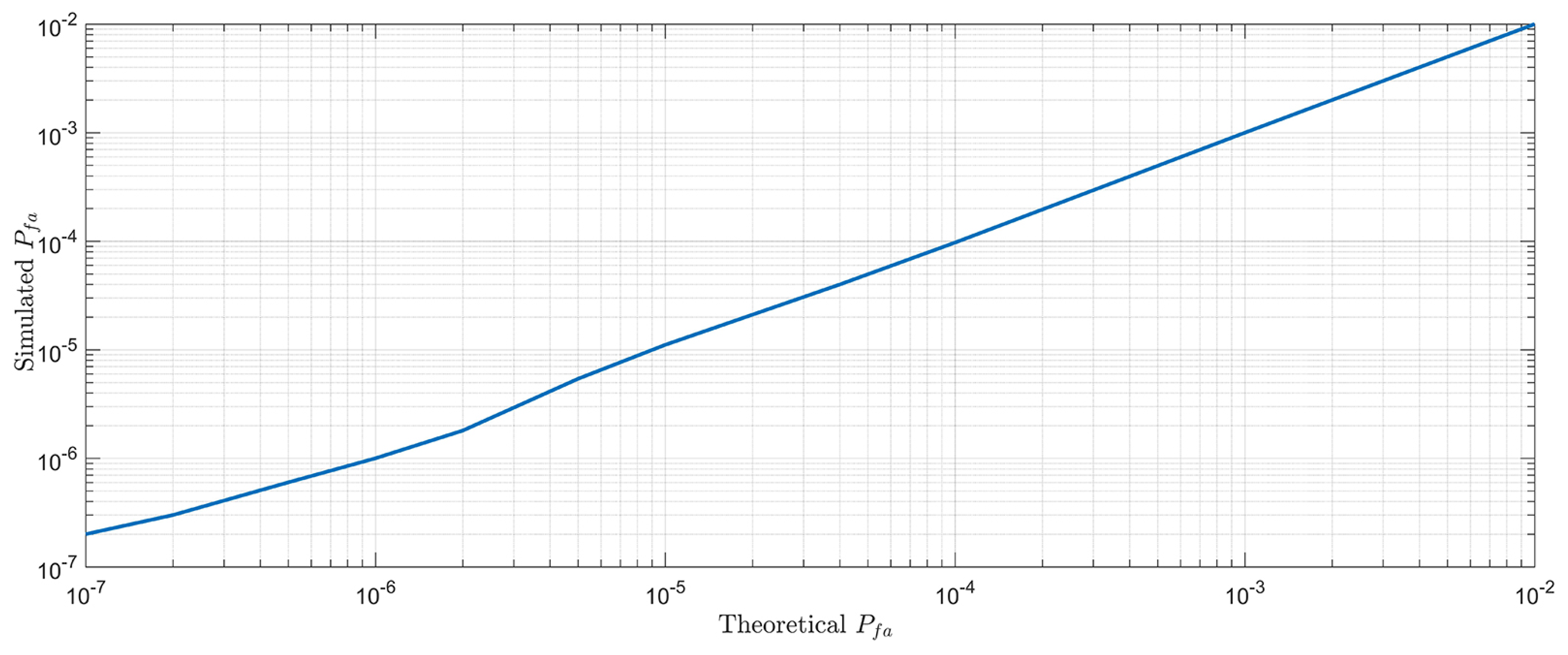
3.1. Range Finding Signal Acquisition
3.2. Distance Measurement Performance of PRG Method
- The mean variance of thermal noise error can be expressed as:
- The mean square error of Allan can be expressed as:
- Phase jitter caused by the mechanical vibration of user movement and the receivers of the frequency of oscillation is , and then
Coarse Ranging Finding Performance
4. Discussion
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| PRG | Phase Regeneration |
| IoT | Internet of things |
| GBDT | Gradient Boost Decision Tree |
| RSS | Received signal strength |
| RSSI | Received signal strength indicator |
| PLL | Phase-locked loop |
| FLL | Frequency-locked loop |
| CDF | Cumulative distribution function |
| GPS | Global Positioning System |
| RTD | Round-trip delay time |
References
- Hur, H.; Ahn, H.S. Discrete-Timeinfty filtering for mobile robot localization using wireless sensor network. IEEE Sens. J. 2013, 13, 245–252. [Google Scholar] [CrossRef]
- Conti, A.; Guerra, M.; Dardari, D.; Decarli, N.; Win, M.Z. Network experimentation for cooperative localization. IEEE J. Sel. Areas Commun. 2012, 30, 467–475. [Google Scholar] [CrossRef]
- Zheng, J.; Wu, C.; Chu, H.; Xu, Y. An improved RSSI measurement in wireless sensor networks. Procedia Eng. 2011, 15, 876–880. [Google Scholar] [CrossRef]
- Phillips, J.; Green, R.; Alam, M. Time-of-Flight distance measurements using smart phones. In Proceedings of the 2014 IEEE International Conference on Mobile Services, Anchorage, AK, USA, 27 June–2 July 2014; pp. 153–154. [Google Scholar]
- Wang, H.; Wan, J.; Liu, R. A novel ranging method based on RSSI. Energy Procedia 2011, 12, 230–235. [Google Scholar] [CrossRef]
- Cho, H.; Ji, J.; Chen, Z.; Park, H.; Lee, W. Measuring a distance between things with improved accuracy. Procedia Comput. Sci. 2015, 52, 1083–1088. [Google Scholar] [CrossRef]
- Chowdhury, T.I.; Rahman, M.M.; Parvez, S.; Alam, A.K.M.M.; Basher, A.; Alam, A.; Rizwan, S. A multi-step approach for RSSi-based distance estimation using smartphones. In Proceedings of the 2015 International Conference on Networking Systems and Security (NSysS), Dhaka, Bangladesh, 5–7 January 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Barai, S.; Biswas, D.; Sau, B. Estimate distance measurement using NodeMCU ESP8266 based on RSSI technique. In Proceedings of the 2017 IEEE Conference on Antenna Measurements Applications (CAMA), Tsukuba, Japan, 4–6 December 2017; pp. 170–173. [Google Scholar] [CrossRef]
- Akiyama, T.; Sugimoto, M.; Hashizume, H. SyncSync: Time-of-arrival based localization method using light-synchronized acoustic waves for smartphones. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Lanzisera, S.; Zats, D.; Pister, K.S.J. Radio frequency time-of-flight distance measurement for low-cost wireless sensor localization. IEEE Sens. J. 2011, 11, 837–845. [Google Scholar] [CrossRef]
- Ward, P.W. GPS receiver search techniques. In Proceedings of the Position Location and Navigation Symposium, Atlanta, GA, USA, 22–25 April 1996; pp. 604–611. [Google Scholar] [CrossRef]
- Kaplan, E.D.; Hegarty, C. Understanding GPS: Principles and Applications, 2nd ed.; Artech House Mobile Communications Series; Artech House: Boston, MA, USA, 2006. [Google Scholar]
- Humphreys, T.E.; Psiaki, M.L. GPS carrier tracking loop performance in the presence of ionospheric scintillations. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Mao, W.L.; Tsao, H.W.; Chang, F.R. Intelligent GPS receiver for robust carrier phase tracking in kinematic environments. Radar Sonar Nav. 2004, 151, 171–180. [Google Scholar] [CrossRef]
- Bose, A.; Foh, C.H. A practical path loss model for indoor WiFi positioning enhancement. In Proceedings of the 6th International Conference on Information, Communications Signal Processing, Singapore, 10–13 December 2007; pp. 1–5. [Google Scholar] [CrossRef]
- Kamel, A. Design and testing of an intelligent GPS tracking loop for noise reduction and high dynamics applications. In Proceedings of the 23rd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 3235–3243. [Google Scholar]
- Shenzhen Rakwireless Technology Co., Ltd. RAK476 UART Wi-Fi Module Specification V1.3. Available online: http://wiki.rakwireless.com/lib/exe/fetch.php?media=rak476_uart_wifi_module_specification_v1.3.pdf (accessed on 9 July 2018).
- Jung, J.; Enge, P.; Pervan, B. Optimization of Cascade Integer Resolution with Three Civil GPS Frequencies. Proceedings of 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 2191–2200. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 25 Hz | |
| 1 ms | |
| 30 m | |
| 48 dB· Hz |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, Y.; Zhu, D.; Liu, Y. PRG: A Distance Measurement Algorithm Based on Phase Regeneration. Sensors 2018, 18, 2595. https://doi.org/10.3390/s18082595
Cui Y, Zhu D, Liu Y. PRG: A Distance Measurement Algorithm Based on Phase Regeneration. Sensors. 2018; 18(8):2595. https://doi.org/10.3390/s18082595
Chicago/Turabian StyleCui, Yansong, Di Zhu, and Yanxu Liu. 2018. "PRG: A Distance Measurement Algorithm Based on Phase Regeneration" Sensors 18, no. 8: 2595. https://doi.org/10.3390/s18082595
APA StyleCui, Y., Zhu, D., & Liu, Y. (2018). PRG: A Distance Measurement Algorithm Based on Phase Regeneration. Sensors, 18(8), 2595. https://doi.org/10.3390/s18082595