GRC-Sensing: An Architecture to Measure Acoustic Pollution Based on Crowdsensing

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Related Works
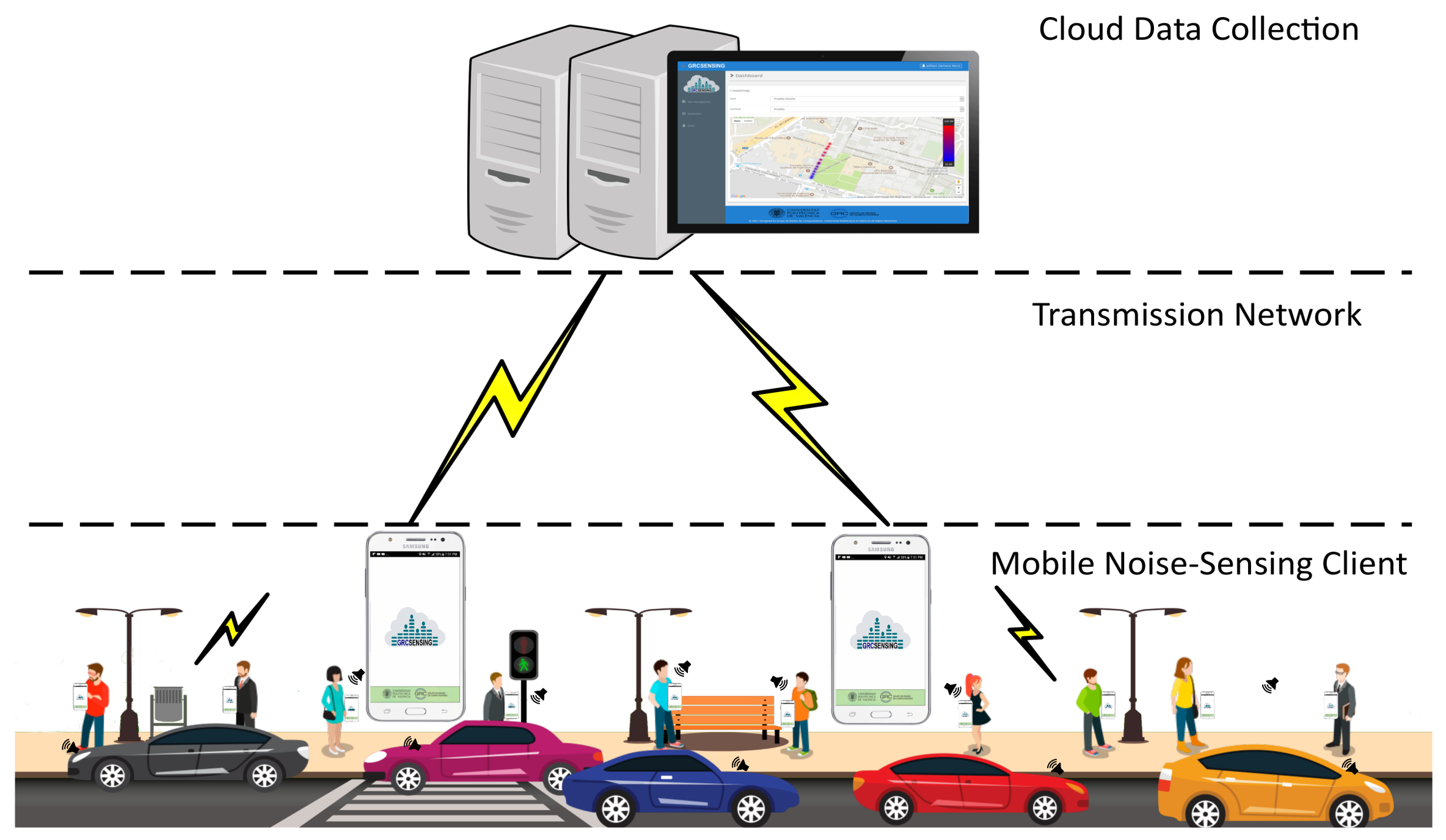
3. Crowdsensing Architecture Overview
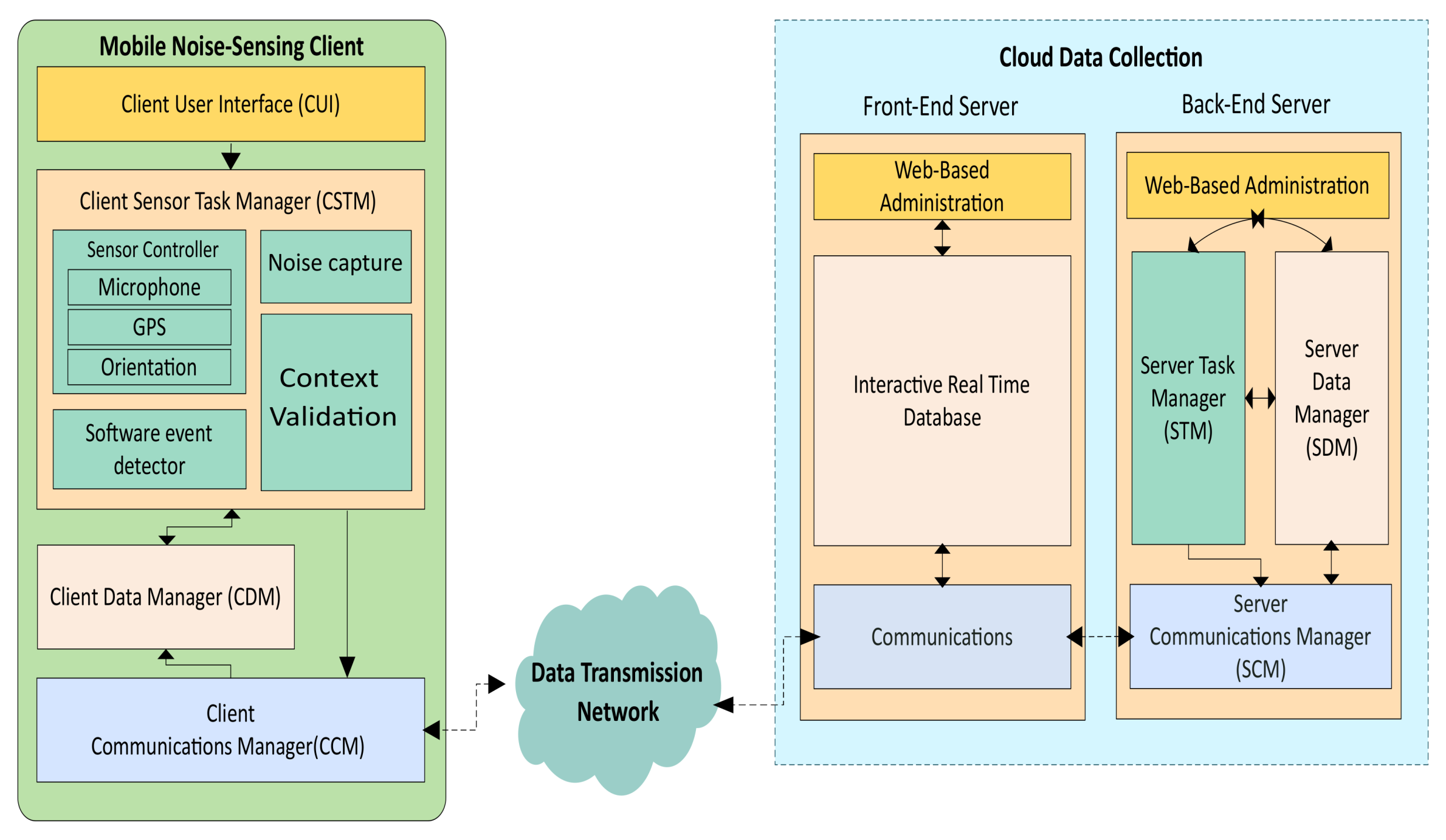
3.1. Mobile Noise-Sensing Client (MNSC)
3.1.1. Client User Interface (CUI)
3.1.2. Client Sensor Manager Task (CSTM)
- Context Validate—This sub-component aims to determine the optimal strategy for collecting noise pollution data through smartphones. In general, it integrates an algorithm-based decision tree that interacts synchronously with the Sensor Controller (SC) and the Software Event Detector (SED). The purpose of the interaction with CDM is to read the data of the task that is stored in the local database (SQLite). Regarding the interaction with SC and SED, its function is to obtain the previously processed values of the sensors (i.e., GPS, Orientation, etc.), and to perform calls to the operating system (i.e., determine whether the phone has the music player active), respectively. Once the answer is true for all cases, the algorithm proceeds to sample the noise. Also, the Context Validate has an algorithm that balances the use of tasks that are in the same range of date and time. Besides, to minimize energy consumption, Context Validate enforces a minimum time between trial and collected samples. Those times are given in the task from the CDC. In Section 4, we show the implementation details of our collection strategy.
- Sensor Controller—This component implements the access to the different sensors proposed in our architecture, thus providing access to gyroscope, accelerometer, microphone, and GPS.
- Noise capture—This component allows the data to be preprocessed before interacting with Validate Context. In particular, we process raw sound data and then store only a numeric dB(A) value to protect the privacy of users. In Section 4 we show the details and strategies to obtain a correct and calibrated measurement.
- Sensor Event Detector—This component allows to determine the different status of the smartphones (i.e., playing music, speaker on, and smartphone performing active call) through a call to the operating system.
3.1.3. Client Data Manager (CDM)
3.1.4. Client Communications Manager (CCM)
3.2. Cloud Data Collection (CDC)
3.2.1. Front-End Server
- Web-Based Administration—It is the administration console provided by Firebase [37]. Firebase is a Google solution that is integrated with our architecture in a simple and transparent manner through their Application Programming Interface (API). Among other options (i.e., hosting, analytic, etc.), it allows us to manage the database in real time.
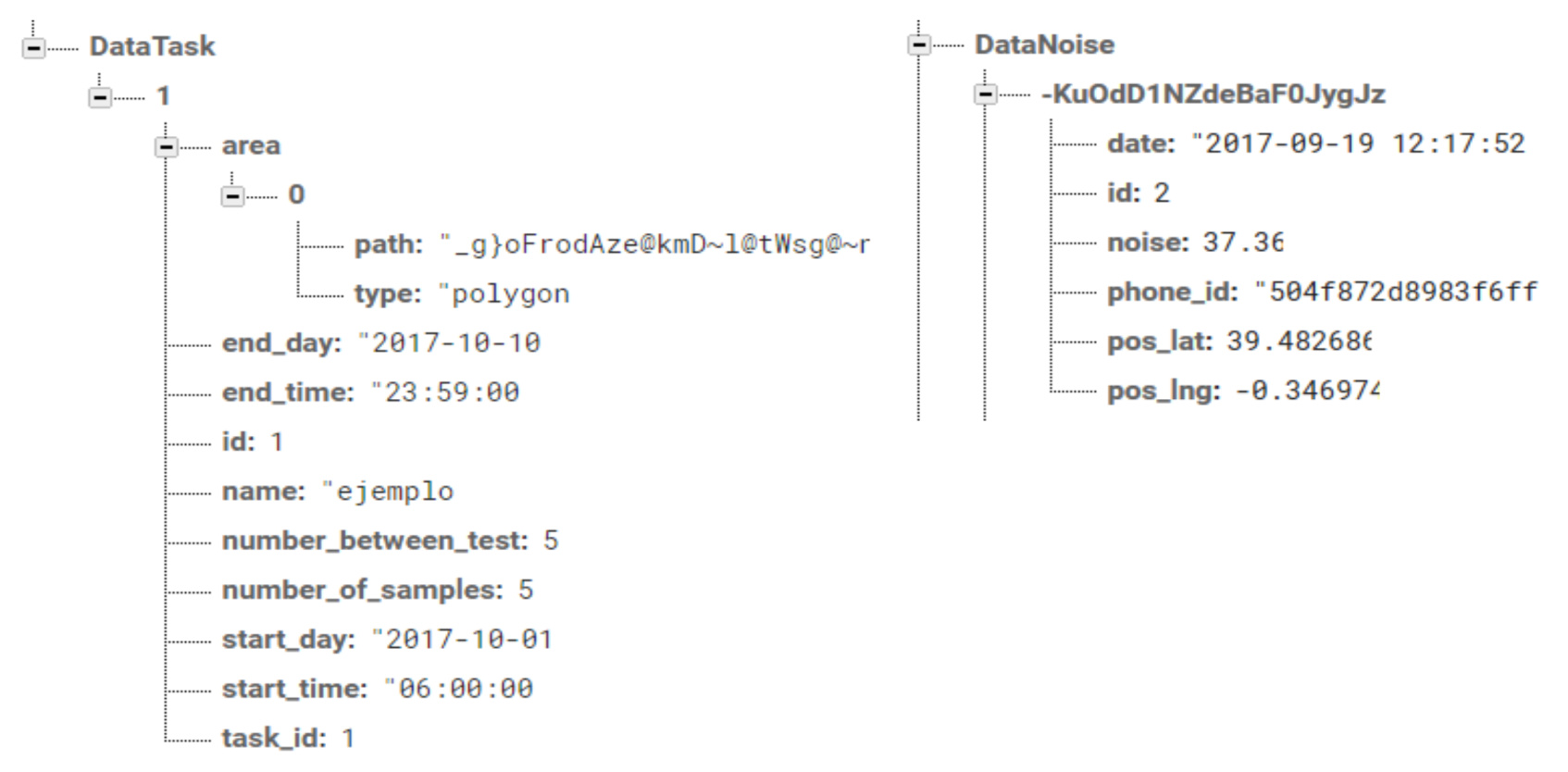
- Interactive Real Time Database—It is our real-time (NoSQL) database, whose format is JavaScript Object Notation (JSON). In general, it is a gateway responsible for automatically sending/receiving sensing tasks towards smartphones. The tasks are previously defined in the Back-End Server, and are sent to this database whenever the administrator user requires it. The data sent and received are temporarily saved for the duration of the date range defined in each task. In particular, we maintain two “DataNoise” and “DataTask” objects within our JSON object. The first one stores the values of the task, and the second one stores the values of the captured noise. Figure 3 shows the attributes of our JSON objects.
- Communications—Firebase uses a push communications model for sending data to specific recipients registered in its database. Generally, Firebase maintains a two-way open socket-based communications channel for the CDC and MNSC.
3.2.2. Back-End Server
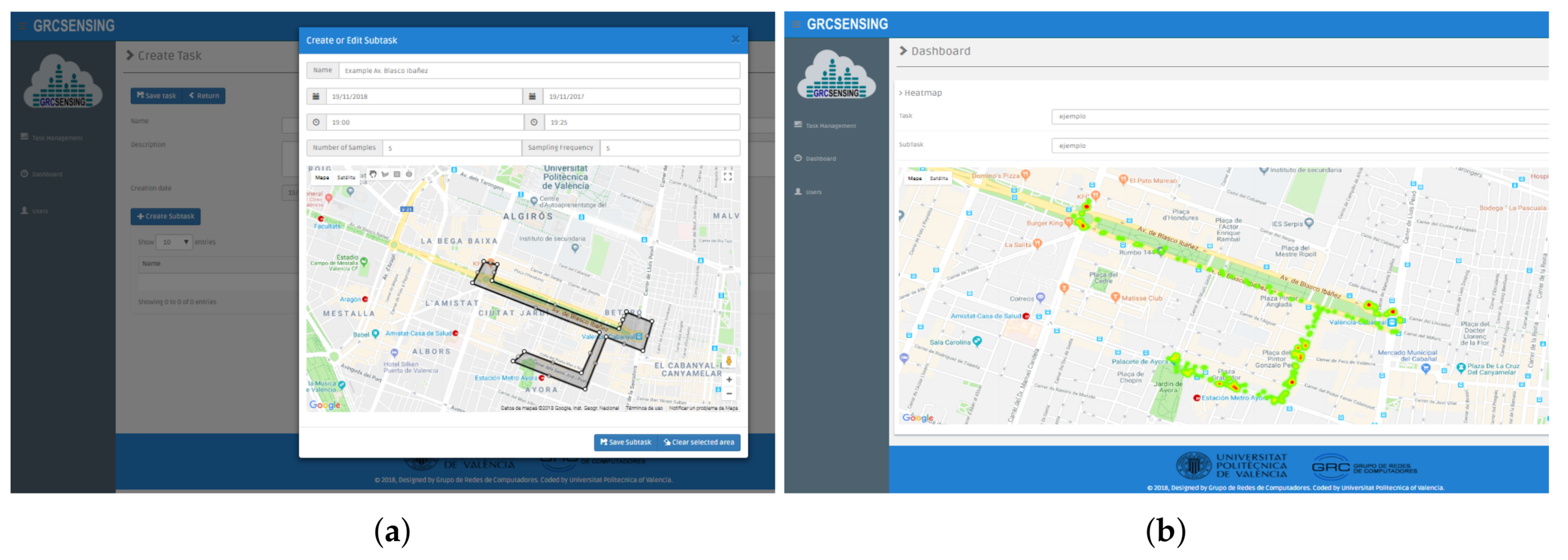
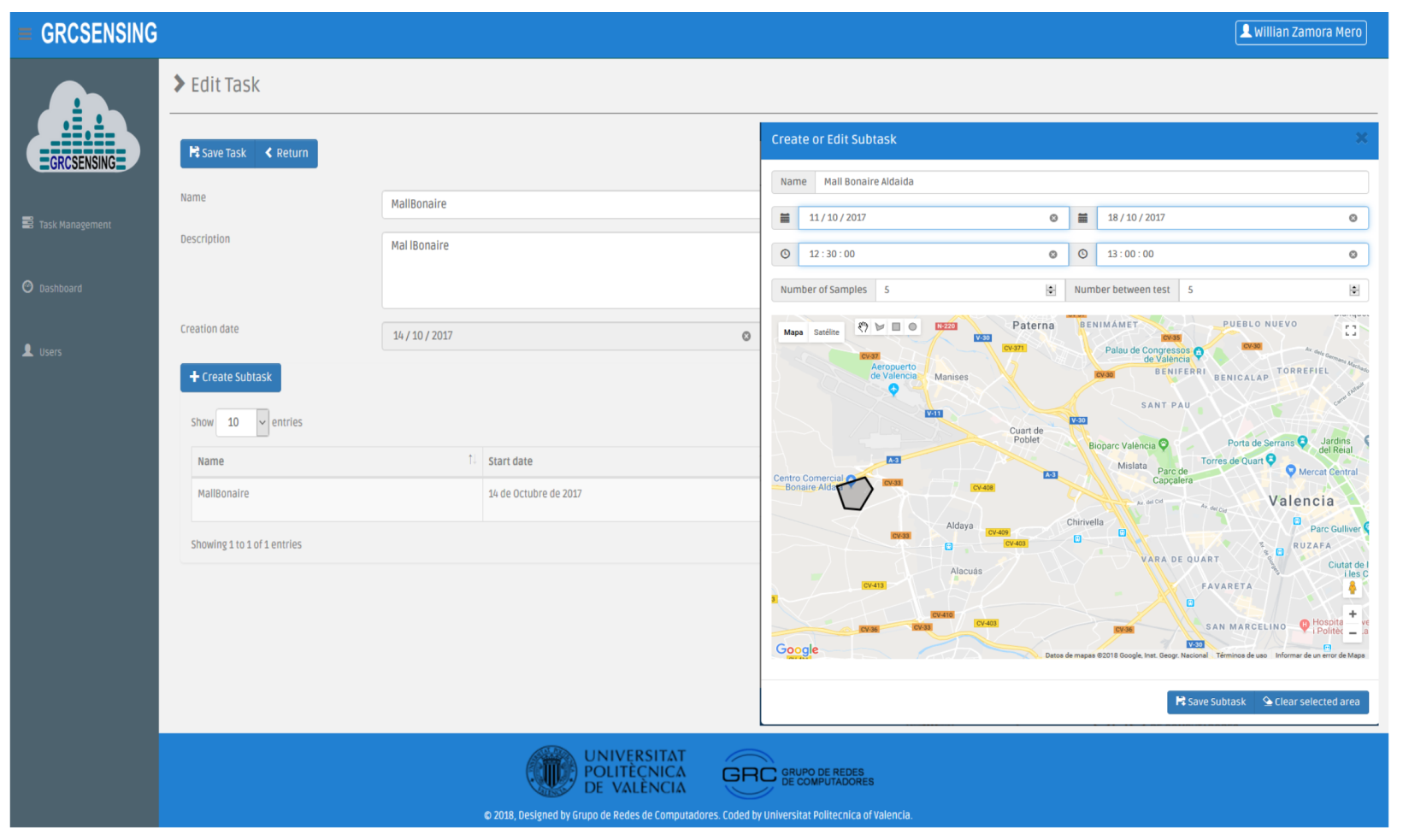
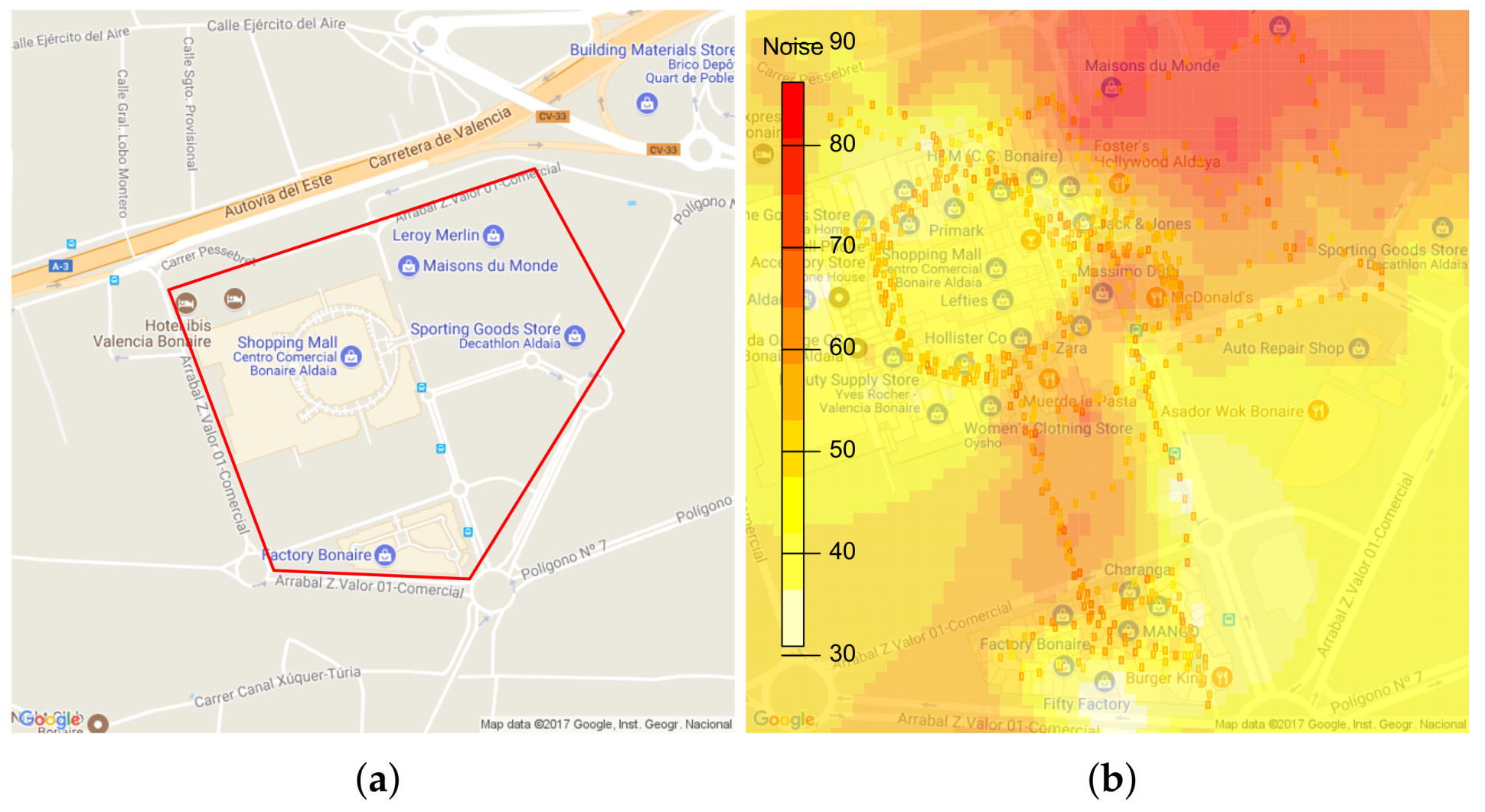
- Web-Based Administration: This component allows the user to manage and schedule noise-sensing tasks interactively. It also supports the visualization of charts (heat-map) relative to the sensed data. Both functionalities are performed using a web-based graphical interface, meaning that the system manager can operate remotely. The site is available at http://www.grcsensing.net, and its design is shown in Figure 4, where the administrator (among other users) can create sensing tasks in specific areas, as shown in Figure 4a,b; in the latter, an example of a heatmap in the previously defined area is shown.
- Server Task Manager (STM): Task Management is one of the main components of the Back-End Server according to our proposed architecture, being responsible for scheduling planning, and the pushing of crowdsensing noise tasks. For the definition of the tasks, we have created two attributes: one for the waiting time between attempts, and another one for the time between samples. The purpose of these features is to minimize the consumption of resources in the tasks handled by smartphones. Also, we have enabled three types of geographic areas selection (polygons of n sides, rectangle, and circle) for the capture of environmental noise. Finally, once created, the tasks are stored by the SDM, and they can be forwarded to the Front-End Server when the user administrator considers it necessary. Figure 4 shows an example to create the task for the gathering of noise, and the area selection using a circle.
- Server Data Manager (SDM): This component is responsible for the processing, storage, query, and analysis of the noise-sensing task.
- Server Communications Manager (SCM)—The SCM is the Rest API that supports the communication between the Back-End Server and the Front-End Server. In our architecture, we used a unidirectional interaction between SCM and STM, and a bidirectional one between SCM and SDM. The interaction with STM is unidirectional since we have transmission towards the Front-End Server when pushing new noise-sensing tasks. The communication with the SDM is bidirectional since, when the API is notified of the existence of a new registry (data capture), it is first consulted before being inserted. Once the record has been inserted into the database, the SCM proceeds to delete the record in the Front-End Server. In particular, we have used Pyrebase [38], which is an API written in Python. Figure 2 shows the communication between these components.
3.3. Data Transmission Network
3.4. Implementation
4. Sampling Process Optimizations
4.1. Attribute Context Classification
- TaskDate. This attribute allows you to validate the existence of a new sensing task pushed by the server, and to check the range of dates and times associated with a particular task.
- TaskArea. This attribute allows determining whether the smartphone is within any of the target areas considered of interest to the task. In this study, we have defined the target area as a generic polygon of n sides, or as a circle.
- Speaker. This attribute allows checking whether the smartphone’s built-in speakers are on or off. We make use of a call to the system audio administrator to obtain this state information.
- Music. This attribute allows determining when the smartphone is playing music. This information is made available through a call to the operating system. Such playback can be triggered by an event produced by WhatsApp, Spotify, Youtube, or similar applications.
- ActiveCall. This attribute allows determining whether the smartphone has an active call through the telephony management API, which allows determining the specific state of the device.
- PhoneStatus. This attribute refers to the four main states of a smartphone: on the hand, on a flat surface facing upwards/downwards, in a pocket, and in a bag. If the smartphone is being held, or if the smartphone is on a flat surface facing upwards, this is considered a favorable context. We have discarded the options where the smartphone is inside a bag, in a pocket, and over a flat surface facing downwards. Section 4.2 provides details about the classification method adopted for PhoneStatus.
- ActiveApplication. This context allows determining whether the smartphone is making use of some type of social network application or similar (i.e., WhatsApp, Instagram, Facebook, etc.).
- Block. This attribute allows determining whether the smartphone’s screen is locked or unlocked.
- Microphone. This attribute allows determining whether the microphone integrated in the smartphone is activated or not.
- KeyBoard. This attribute allows determining whether the screen keyboard is activated or not. In general, this can be an indicator that the user is actively using an application, and it can be a good moment to perform a noise sample.
- Camera. This attribute allows determining whether the smartphone’s camera is activated or not.
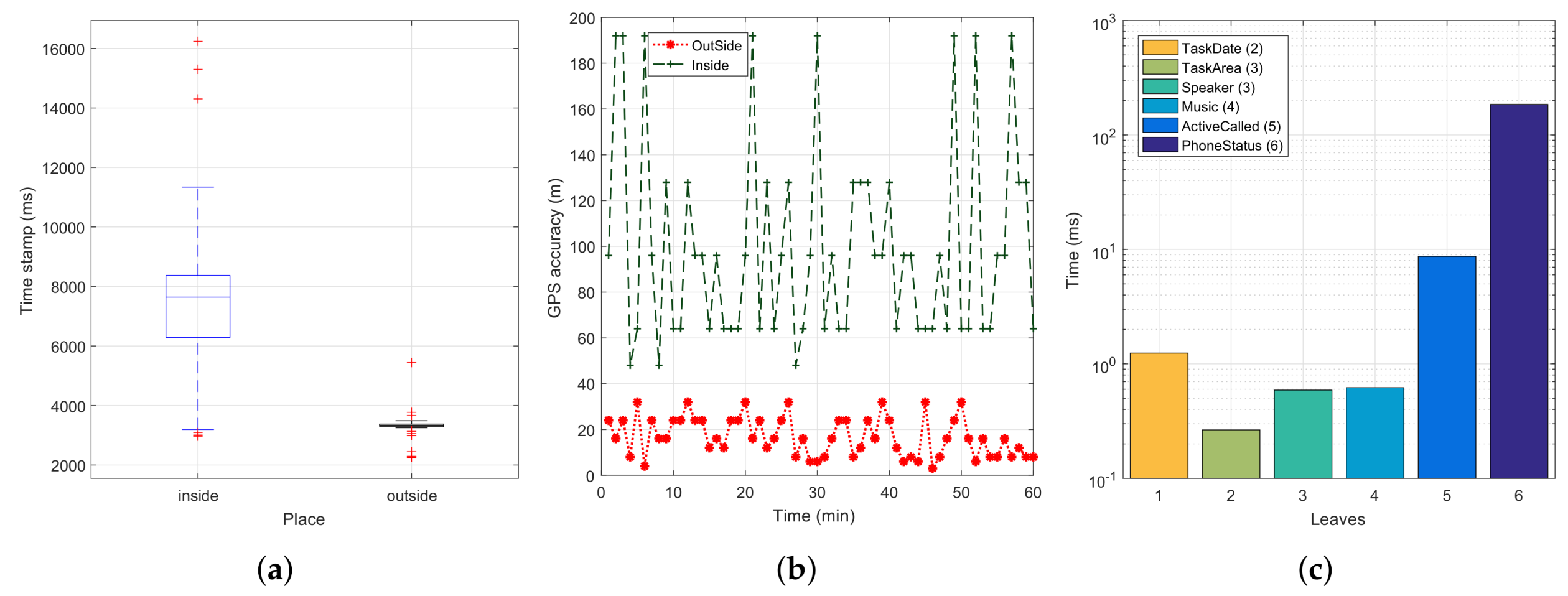
- Location. This attribute allows determining whether the smartphone is indoors or outdoors, as only outdoor measurements are targeted. This is assessed by accounting for the satellite visibility, which is quite reduced when indoors.
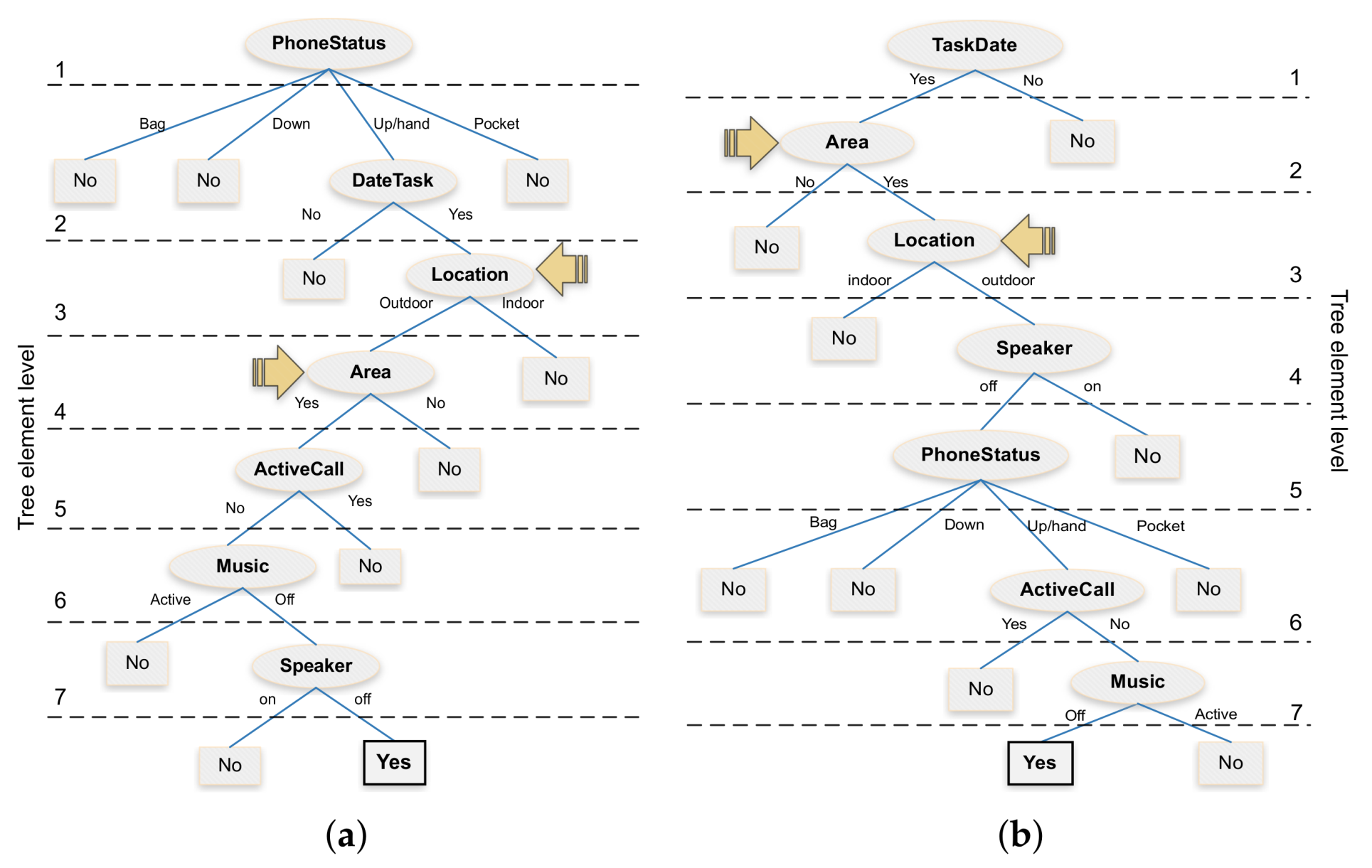
4.2. Task Sequencing Optimization
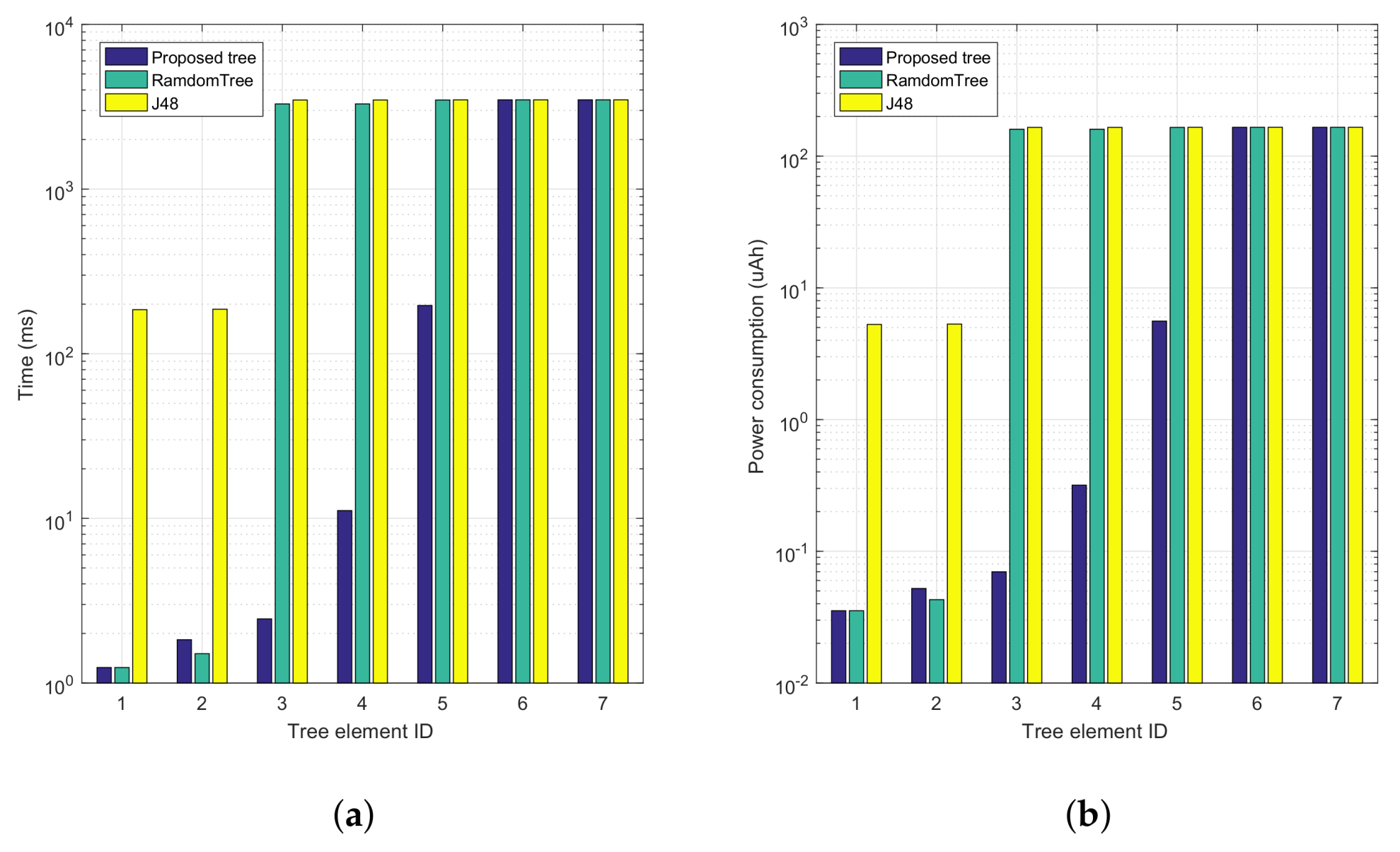
4.2.1. Computation Time
4.2.2. Energy Consumption
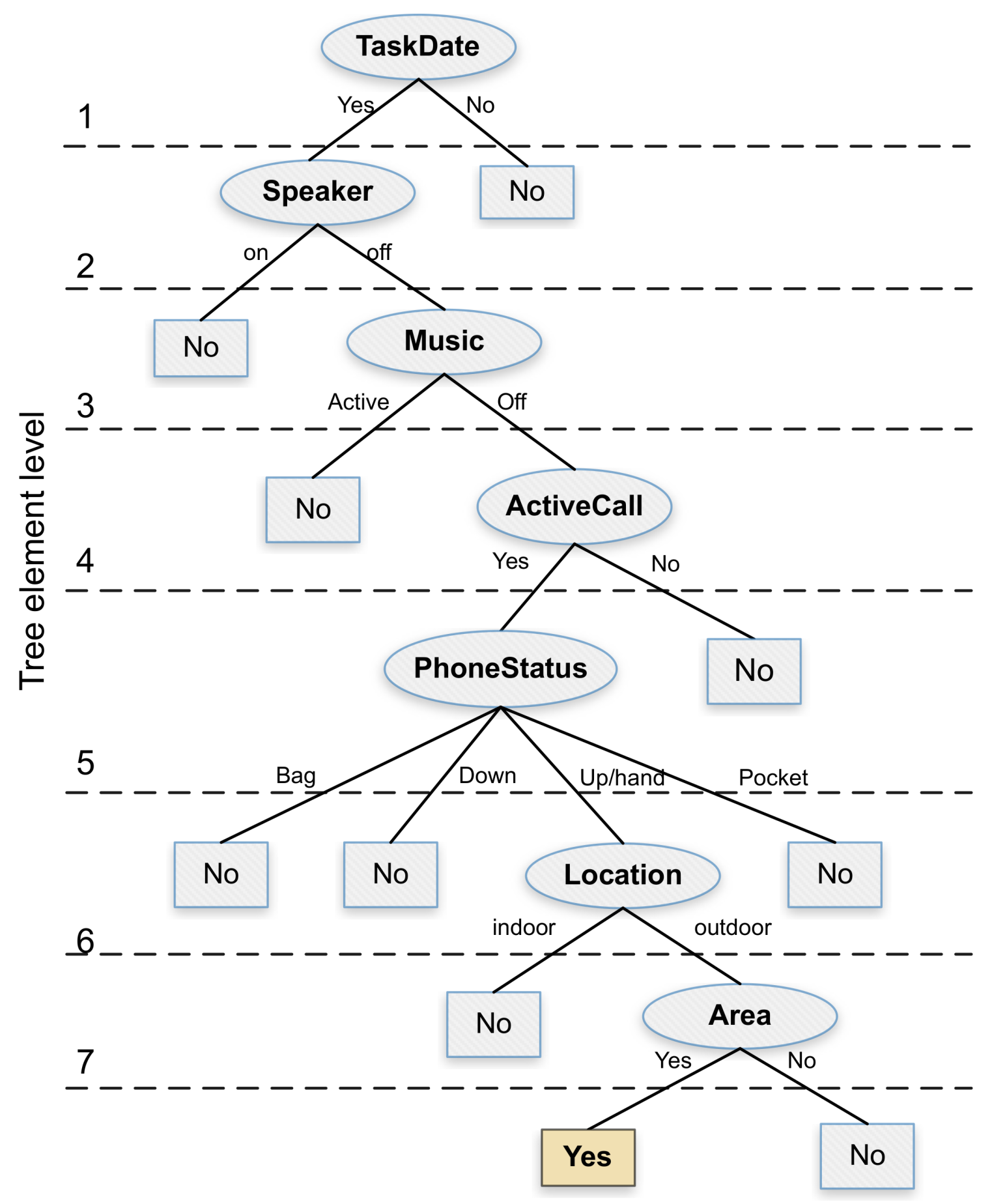
4.2.3. Proposed Tree and Performance Improvement
4.3. Accurate Ambient Noise Assessment Using Smartphones
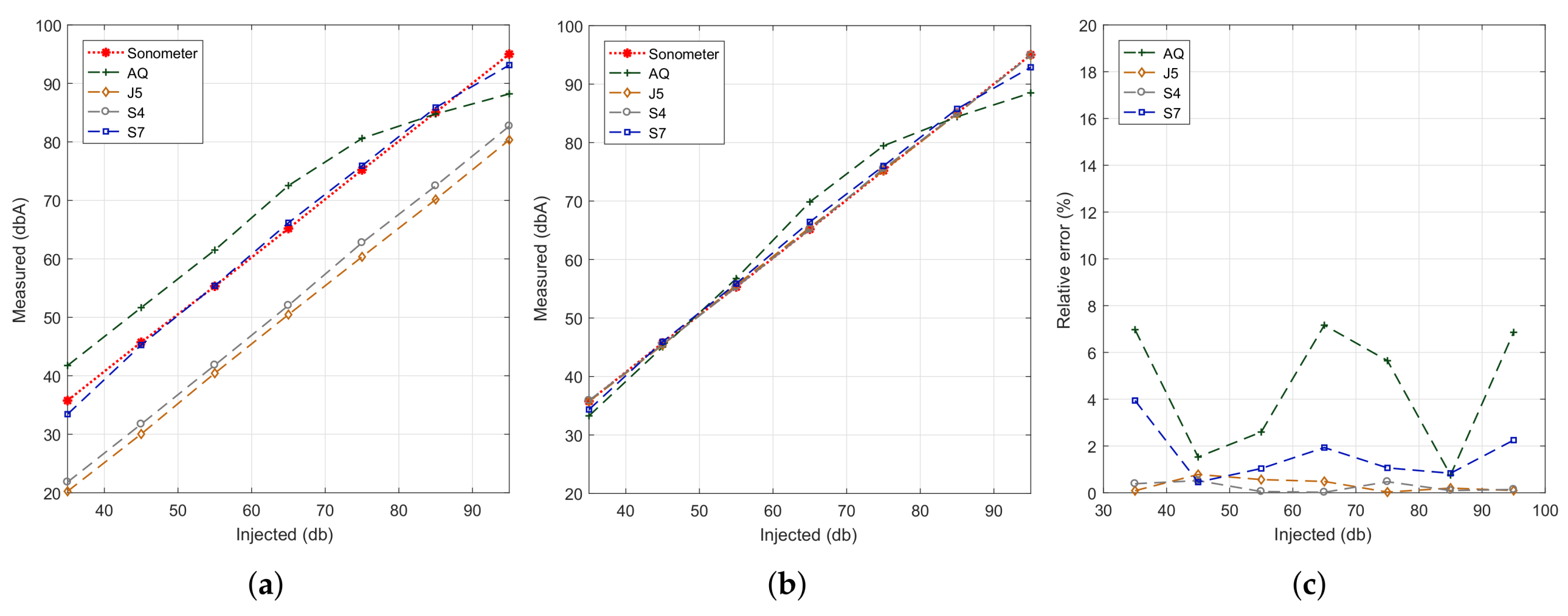
4.3.1. Analysis Using Different Smartphone models and Calibrations
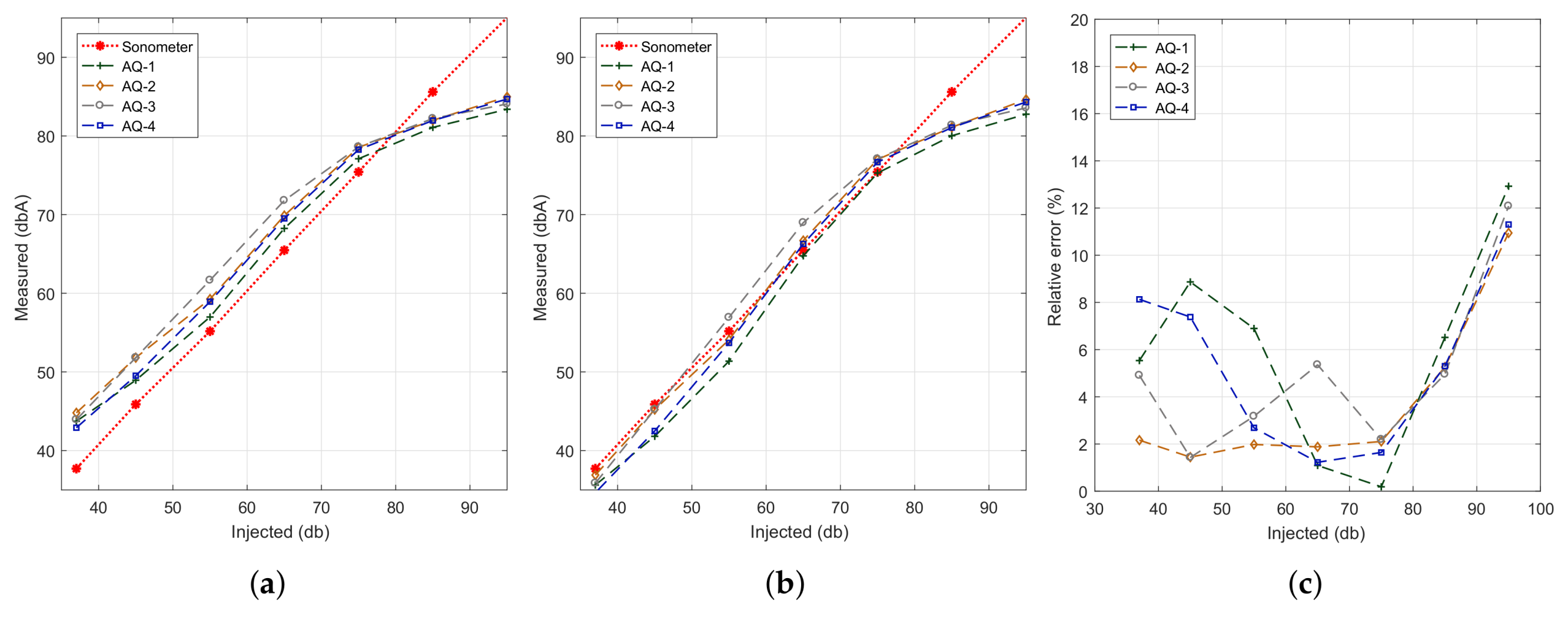
4.3.2. Analysis for a Same Smartphone Model
5. Validation of the Proposed Architecture
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| GPS | Global Positioning System |
| CPU | Central Processor Unit |
| MNSC | Mobile Noise-Sensing Client |
| CDC | Cloud Data Colletion |
| CUI | Client User Interface |
| CSTM | Client Sensor Task Manager |
| CDM | Client Data Manager |
| CCM | Client Communications Manager (CCM) |
| STM | Server Task Manager |
| SDM | Server Data Manager |
| SCM | Server Communications Manager |
| SED | Software Event Detector |
| API | Application Programming Interface |
| JSON | JavaScript Object Notation |
| SQL | Structured Query Language |
| RESTful | Representational State Transfer |
| SC | Sensor Controller |
| UPV | Technical University of Valencia |
References
- NIOSH. CDC-NIOSH Publications and Products—Occupational Noise Exposure (98–126). 2013. Available online: https://www.cdc.gov/niosh/docs/98-126 (accessed on 30 June 2016).
- Agency, E.E. Noise European Environment Agency. 2016. Available online: http://www.eea.europa.eu/themes/noise/intro (accessed on 10 November 2016).
- Parliament, E. Legislation—Directive 2002/49/EC of the European Parliament and of the Council of 25 June 2002 relating to the assessment and management of environmental noise. Off. J. Eur. Commun. 2002, 45, 12–25. [Google Scholar]
- Parliament, E. Directives—Commission Directive (EU) 2015/996 of 19 May 2015 establishing common noise assessment methods according to Directive 2002/49/EC of the European Parliament and of the Council. Off. J. Eur. Union 2015, 58, 1. [Google Scholar]
- Zannin, P.H.T.; Ferreira, A.M.C.; Szeremetta, B. Evaluation of Noise Pollution in Urban Parks. Environ. Monit. Assess. 2006, 118, 423–433. [Google Scholar] [CrossRef] [PubMed]
- Commission, I.E. Electroacoustics—Sound Level Meters, Part 1: Specification. 2005. Available online: https://webstore.iec.ch/publication/5708 (accessed on 7 January 2017).
- Ganti, R.; Ye, F.; Lei, H. Mobile Crowdsensing: Current State and Future Challenges. IEEE Commun. Mag. 2011, 49, 32–39. [Google Scholar] [CrossRef]
- Guo, B.; Wang, Z.; Yu, Z.; Wang, Y.; Yen, N.Y.; Huang, R.; Zhou, X. Mobile Crowd Sensing and Computing. ACM Comput. Surv. 2015, 48, 7. [Google Scholar] [CrossRef]
- Maisonneuve, N.; Stevens, M.; Niessen, M.E.; Steels, L. NoiseTube: Measuring and mapping noise pollution with mobile phones. In Environmental Science and Engineering (Subseries: Environmental Science); Golinska, P., Fertsch, M., Marx-Gómez, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 3, pp. 215–228. [Google Scholar]
- Kanjo, E. NoiseSPY: A Real-Time Mobile Phone Platform for Urban Noise Monitoring and Mapping. Mob. Netw. Appl. 2010, 15, 562–574. [Google Scholar] [CrossRef]
- Rana, R.K.; Chou, C.T.; Kanhere, S.S.; Bulusu, N.; Hu, W. Ear-Phone: An End-to-End Participatory Urban Noise Mapping System. In Proceedings of the 9th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN ’10), Stockholm, Sweden, 12–16 April 2010; ACM Press: New York, NY, USA; pp. 105–116. [Google Scholar]
- Wisniewski, M.; Demartini, G.; Malatras, A.; Cudre-Mauroux, P. NoizCrowd: A Crowd-Based Data Gathering and Management System for Noise Level Data. In Lecture Notes in Computer Science, Proceedings of the 10th International Conference Mobile Web Information Systems (MobiWIS 2013), Paphos, Cyprus, 26–29 August 2013; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8093, pp. 172–186. [Google Scholar]
- Ruge, L.; Altakrouri, B.; Schrader, A. SoundOfTheCity-Continuous noise monitoring for a healthy city. In Proceedings of the 2013 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), San Diego, CA, USA, 18–22 March 2013; pp. 670–675. [Google Scholar]
- Lane, N.; Miluzzo, E.; Lu, H.; Peebles, D.; Choudhury, T.; Campbell, A. A survey of mobile phone sensing. IEEE Commun. Mag. 2010, 48, 140–150. [Google Scholar] [CrossRef] [Green Version]
- D’Hondt, E.; Stevens, M.; Jacobs, A. Participatory noise mapping works! An evaluation of participatory sensing as an alternative to standard techniques for environmental monitoring. Pervasive Mob. Comput. 2013, 9, 681–694. [Google Scholar] [CrossRef]
- Masini, B.M.; Bazzi, A.; Zanella, A. Vehicular Visible Light Networks for Urban Mobile Crowd Sensing. Sensors 2018, 18, 1177. [Google Scholar] [CrossRef] [PubMed]
- Zamora, W.; Calafate, C.; Cano, J.C.; Manzoni, P. Accurate Ambient Noise Assessment Using Smartphones. Sensors 2017, 17, 917. [Google Scholar] [CrossRef] [PubMed]
- Rana, R.; Chou, C.T.; Bulusu, N.; Kanhere, S.; Hu, W. Ear-Phone: A context-aware noise mapping using smart phones. Pervasive Mob. Comput. 2015, 17, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Qin, Z.; Zhu, Y. NoiseSense: A Crowd Sensing System for Urban Noise Mapping Service. In Proceedings of the 2016 IEEE 22nd International Conference on Parallel and Distributed Systems (ICPADS), Wuhan, China, 13–16 December 2016; pp. 80–87. [Google Scholar]
- Agarwal, V.; Banerjee, N.; Chakraborty, D.; Mittal, S. USense—A Smartphone Middleware for Community Sensing. In Proceedings of the 2013 IEEE 14th International Conference on Mobile Data Management, Milan, Italy, 3–6 June 2013; Volume 1, pp. 56–65. [Google Scholar]
- Zappatore, M.; Longo, A.; Bochicchio, M.A. Crowd-sensing our Smart Cities: A Platform for Noise Monitoring and Acoustic Urban Planning. J. Commun. Softw. Syst. 2017, 13, 53–67. [Google Scholar] [CrossRef]
- Lane, N.D.; Chon, Y.; Zhou, L.; Zhang, Y.; Li, F.; Kim, D.; Ding, G.; Zhao, F.; Cha, H. Piggyback CrowdSensing (PCS): Energy Efficient Crowdsourcing of Mobile Sensor Data by Exploiting Smartphone App Opportunities. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems (SenSys), Rome, Italy, 11–14 November 2013; p. 7. [Google Scholar]
- Zarko, I.P.; Antonic, A.; Pripužic, K. Publish/subscribe middleware for energy-efficient mobile crowdsensing. In Proceedings of the 2013 ACM Conference on Pervasive and Ubiquitous Computing Adjunct Publication (UbiComp 13), Zurich, Switzerland, 8–12 September 2013; ACM Press: New York, NY, USA; pp. 1099–1110. [Google Scholar]
- Thiagarajan, A.; Ravindranath, L.; LaCurts, K.; Madden, S.; Balakrishnan, H.; Toledo, S.; Eriksson, J. VTrack: Accurate, Energy-aware Road Traffic Delay Estimation Using Mobile Phones. In Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems (SenSys 09), Berkeley, CA, USA, 4–6 November 2009; pp. 85–98. [Google Scholar]
- Oshin, T.O.; Poslad, S.; Ma, A. Improving the Energy-Efficiency of GPS Based Location Sensing Smartphone Applications. In Proceedings of the 2012 IEEE 11th International Conference on Trust, Security and Privacy in Computing and Communications, Liverpool, UK, 25–27 June 2012; pp. 1698–1705. [Google Scholar]
- Zhang, L.; Liu, J.; Jiang, H.; Guan, Y. SensTrack: Energy-Efficient Location Tracking With Smartphone Sensors. IEEE Sens. J. 2013, 13, 3775–3784. [Google Scholar] [CrossRef]
- Hoque, M.A.; Siekkinen, M.; Khan, K.N.; Xiao, Y.; Tarkoma, S. Modeling, Profiling, and Debugging the Energy Consumption of Mobile Devices. ACM Comput. Surv. 2015, 48, 39. [Google Scholar] [CrossRef]
- Chon, Y.; Lane, N.D.; Li, F.; Cha, H.; Zhao, F. Automatically characterizing places with opportunistic crowdsensing using smartphones. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing (UbiComp), Pittsburgh, PA, USA, 5–8 September 2012; p. 481. [Google Scholar]
- Lara, O.D.; Labrador, M.A. A Survey on Human Activity Recognition using Wearable Sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef] [Green Version]
- Shoaib, M.; Bosch, S.; Incel, O.; Scholten, H.; Havinga, P. A Survey of Online Activity Recognition Using Mobile Phones. Sensors 2015, 15, 2059–2085. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schweizer, I.; Bärtl, R.; Schulz, A.; Probst, F.; Mühläuser, M. NoiseMap-real-time participatory noise maps. In Proceedings of the Second International Workshop on Sensing Applications on Mobile Phones, Bethesda, MD, USA, 28 June–1 July 2011; pp. 1–5. [Google Scholar]
- Muratori, L.A.; Salomoni, P.; Pau, G. Feeling the pack: Strategies for an optimal participatory system to sense and recognize noise pollution. In Proceedings of the 2011 IEEE International Conference on Consumer Electronics-Berlin (ICCE-Berlin), Berlin, Germany, 6–8 September 2011; pp. 17–21. [Google Scholar]
- Becker, M.; Caminiti, S.; Fiorella, D.; Francis, L.; Gravino, P.; Haklay, M.M.; Hotho, A.; Loreto, V.; Mueller, J.; Ricchiuti, F.; et al. Awareness and Learning in Participatory noise-sensing. PLoS ONE 2013, 8, e81638. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hachem, S.; Mallet, V.; Ventura, R.; Pathak, A.; Issarny, V.; Raverdy, P.G.; Bhatia, R. Monitoring Noise Pollution Using the Urban Civics Middleware. In Proceedings of the 2015 IEEE First International Conference on Big Data Computing Service and Applications, Redwood City, CA, USA, 30 March–2 April 2015; pp. 52–61. [Google Scholar]
- Zůvala, R.; Fišerová, E.; Marek, L. Noise mapping based on participative measurements. Open Geosci. 2016, 8, 140–156. [Google Scholar] [CrossRef]
- Zamora, W.; Calafate, C.T.; Cano, J.C.; Manzoni, P. A Survey on Smartphone-Based Crowdsensing Solutions. Mob. Inf. Syst. 2016, 2016, 9681842. [Google Scholar] [CrossRef]
- Platform, G.C. Firebase. 2017. Available online: https://firebase.google.com/products/ (accessed on 2 October 2017).
- Childs-Maidment, J. Pyrebase A Simple Python Wrapper for the Firebase API. 2017. Available online: https://pypi.python.org/pypi/Pyrebase (accessed on 7 July 2017).
- Foundation, D.S. About the Django Software Foundation. 2017. Available online: https://www.djangoproject.com/foundation/ (accessed on 7 July 2017).
- R-Foundation. R Project. Available online: https://www.r-project.org (accessed on 1 November 2015).
- University of Waikato. Weka 3-Data Mining with Open Source Machine Learning Software in Java. 2017. Available online: http://www.cs.waikato.ac.nz/ml/weka/ (accessed on 4 April 2017).
- Salzberg, S.L. C4.5: Programs for Machine Learning by J. Ross Quinlan. Morgan Kaufmann Publishers, Inc., 1993. Mach. Learn. 1994, 16, 235–240. [Google Scholar] [CrossRef] [Green Version]
- Bouali, H.; Akaichi, J. Comparative Study of Different Classification Techniques: Heart Disease Use Case. In Proceedings of the 2014 13th International Conference on Machine Learning and Applications, Detroit, MI, USA, 3–6 December 2014; pp. 482–486. [Google Scholar]
- Ltd, P.I.U. Noise meter PCE-322A. 2013. Available online: http://www.industrial-needs.com/technical-data/datalogging-sound-level-meter-sl322.htm (accessed on 7 June 2016).
- Walser, S.; Loibl, M.; Winter, M.; Siegel, C.; Feiertag, G. Sensitivity Recalibration of MEMS Microphones to Compensate Drift and Environmental Influences. Procedia Eng. 2016, 168, 1759–1762. [Google Scholar] [CrossRef]
- Kardous, C.A.; Shaw, P.B. Evaluation of smartphone sound measurement applications. J. Acoust. Soc. Am. 2014, 135, EL186–EL192. [Google Scholar] [CrossRef] [PubMed]
- Kardous, C.A.; Shaw, P.B. Evaluation of smartphone sound measurement applications (apps) using external microphones A follow-up study. J. Acoust. Soc. Am. 2016, 140, EL327–EL333. [Google Scholar] [CrossRef] [PubMed]
- Amin, N.; Gross, T.; Rosenthal, S.; Borschbach, M. Blind Source Separation Performance Based on Microphone Sensitivity and Orientation Within Interaction Devices. In Proceedings of the XVI International Conference on Human Computer Interaction, Vilanova i la Geltrú, Spain, 7–9 September 2015; ACM: New York, NY, USA; p. 26. [Google Scholar]
- Hawley, S.H.; McClain, R.E. Visualizing Sound Directivity via Smartphone Sensors. J. Acoust. Soc. Am. 2016, 140, 2987. [Google Scholar] [CrossRef]
- Valencia City, C. Heatmaps noise of Valencia, Spain. 2017. Available online: https://aytovalencia.maps.arcgis.com/apps/webappviewer/index.html (accessed on 16 July 2017).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Publication | Smartphones | Data Transmission Networks | Cloud Server Task Specification | ||||
|---|---|---|---|---|---|---|---|
| Noise Calibration Procedure | Data Collection | Inteligent Context Awareness | Selection Area/Date | Real Time Data Task | Share Maps | ||
| NoiseTube [9] | Linear interpolation | Participative interaction | No | offline | Manual | No | Yes |
| NoiseSPY [10] | Correlation calibrated | Participative | No | online (cache store) | Manual | No | No |
| NoiseMap [31] | Few details | Participative | No detail | offline | No detail | No | Yes |
| NoiseHound [32] | Few details | Participative | Strategy area for spatio-temporal | Offline ad hoc nework | No | No | Yes |
| Usense [20] | No-detail | Automatic by Server | Yes Rule-based attributes | No detail | Automatic Area and between date | Yes | No detail |
| WideNoise [33] | No detail | Participative | No detail | Offline | Manual area | No | Yes |
| NoizCrowd [12] | No detail | Participative | No | Offline | No detail task area | No | Yes |
| SoundOfTheCity [13] | No detail | Participative | Yes | Offline (SOAP) | No | No | Yes |
| Sense2health [34] | Few details | Participative sensing | No detail | Yes (publish/subscribe RabbitMQ) | No | No | Yes |
| Ear-Phone [11,18] | Regression lineal | Participative | Yes | No | No | No | Unclear |
| OnoM@p [35] | Cross calibration | Participatory | No detail | No detail | No details | No | Yes |
| Soundscape@p [21] | Few details | Participatory | Yes | Online | No details | No | Yes |
| GRC-Sensing | Regression lineal and others | Automatic Only Install | Yes | Online | Yes | Yes | Yes |
| Data JSON | Description Type | Message Size (Bytes) |
|---|---|---|
| DataNoise | Normal data | 236 |
| DataTask | With a polygon of 5 points | 363 |
| With a polygon of 10 points | 404 | |
| With a polygon of 20 points | 411 | |
| With a circle (unencoded) | 461 | |
| With a rectangle (unencoded ) | 509 |
| Categories | Attribute |
|---|---|
| Task | TaskDate, TaskArea |
| Sound | Speaker, Music, ActiveCall, MicroPhone, ActiveApplication |
| Status | PhoneStatus, Blocked, Camera, Keyboard, Location |
| Label | Status | Orientation | Movement | Response | Total Dataset |
|---|---|---|---|---|---|
| Hand (1) | Left, Vertical, Right | North, South, West, East | Static/Walking | X | 4320 |
| Pocket and bag (2) | Up/Down; Vertical/Horizontal | North | Static/Walking | 1440 | |
| Desk up (3) | Up | North, South, West, East | Static | X | 720 |
| Desk down (4) | Down | North, South, West, East | Static | 720 |
| Label | Recognized Value | |||
|---|---|---|---|---|
| (1) | (2) | (3) | (4) | |
| Hand (1) | 4310 | 9 | 1 | - |
| Pocket and bag (2) | 5 | 1434 | - | 1 |
| Desk up (3) | 2 | - | 718 | 719 |
| Desk down (4) | - | 2 | - | 718 |
| Tree Element | Random Tree Ah) | J48 Ah) |
|---|---|---|
| 1 | 0.0354 | 5.2761 |
| 2 | 0.0076 | 0.0354 |
| 3 | 160.00 | 160.00 |
| 4 | 0.0168 | 0.0076 |
| 5 | 5.2761 | 0.2479 |
| 6 | 0.2479 | 0.0176 |
| 7 | 0.0176 | 0.0168 |
| Total | Algorithm | CPU Time (ms) | Energy Ah) | ||
|---|---|---|---|---|---|
| # Elements | ∑ | ∑ | |||
| 7 | Proposed tree | 3483.89 | 897.72 | 165.60 | 42.16 |
| 7 | RandomTree | 3483.89 | 2127.84 | 165.60 | 102.09 |
| 7 | J48 | 3483.89 | 2244.44 | 165.60 | 105.41 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zamora, W.; Vera, E.; Calafate, C.T.; Cano, J.-C.; Manzoni, P. GRC-Sensing: An Architecture to Measure Acoustic Pollution Based on Crowdsensing. Sensors 2018, 18, 2596. https://doi.org/10.3390/s18082596
Zamora W, Vera E, Calafate CT, Cano J-C, Manzoni P. GRC-Sensing: An Architecture to Measure Acoustic Pollution Based on Crowdsensing. Sensors. 2018; 18(8):2596. https://doi.org/10.3390/s18082596
Chicago/Turabian StyleZamora, Willian, Elsa Vera, Carlos T. Calafate, Juan-Carlos Cano, and Pietro Manzoni. 2018. "GRC-Sensing: An Architecture to Measure Acoustic Pollution Based on Crowdsensing" Sensors 18, no. 8: 2596. https://doi.org/10.3390/s18082596
APA StyleZamora, W., Vera, E., Calafate, C. T., Cano, J. -C., & Manzoni, P. (2018). GRC-Sensing: An Architecture to Measure Acoustic Pollution Based on Crowdsensing. Sensors, 18(8), 2596. https://doi.org/10.3390/s18082596