1. Introduction
Wireless sensor networks (WSNs) [
1] have been extensively employed in cyber physical systems, Internet of Things, and industrial control networks [
2,
3]. Many applications, including location, data fusion, sleep scheduling, and collaborative operation, require that sensor nodes should have a common notion of time in industrial WSNs (IWSNs) [
4]. Each node typically obtains its time by counting the output pulse of the built-in crystal oscillator. However, the dynamic network environment and the heterogeneity of crystal oscillators cause crystal frequency deviations, which renders time asynchronous [
5]. The synchronization error is 1.2 ms per minute for a crystal frequency deviation with 20 ppm [
6], and cannot satisfy the timing requirement of closed loop control systems. Thus, numerous packet-exchange-based time synchronization protocols and algorithms have been proposed for different application scenarios [
6,
7,
8,
9,
10,
11,
12,
13,
14].
The majority of existing synchronization protocols mainly aim to satisfy common requirements, including high-precision, low-energy consumption, fast synchronization, and robustness for a dynamic network structure. However, security is also an important problem for synchronization protocols [
15]. Due to working in unattended environments and the broadcast nature of wireless communication, IWSNs are vulnerable to attacks against physical nodes and communication links [
16,
17]. These attacks may cause the network to incur invalid time information. Network time synchronization will fail with invalid time information of attackers. Especially for IWSNs in automobile production line, multi-robot cooperation requires high-precision time synchronization. Attacks that break this synchronization may decrease the production efficiency and cause collisions among industrial robots. Thus, traditional protocols cannot be directly applied to hostile environments without any defensive measures.
By investigating current studies [
18,
19,
20,
21,
22], we learn that many problems remain in designing secure time synchronization mechanisms:
Centralized time synchronization protocols depend on specific source node and layered topology with poor scalability and robustness. The leaf nodes take their parent nodes as their time sources, and then the branch of the parent nodes will be disabled when the parent nodes are attacked.
Distributed time synchronization protocols rely on additional clock information to update their clock parameters, e.g., hardware time, logical clock skew, and logical clock offset. Thus, information diversity has created more problems to design secure decentralized time synchronization mechanisms.
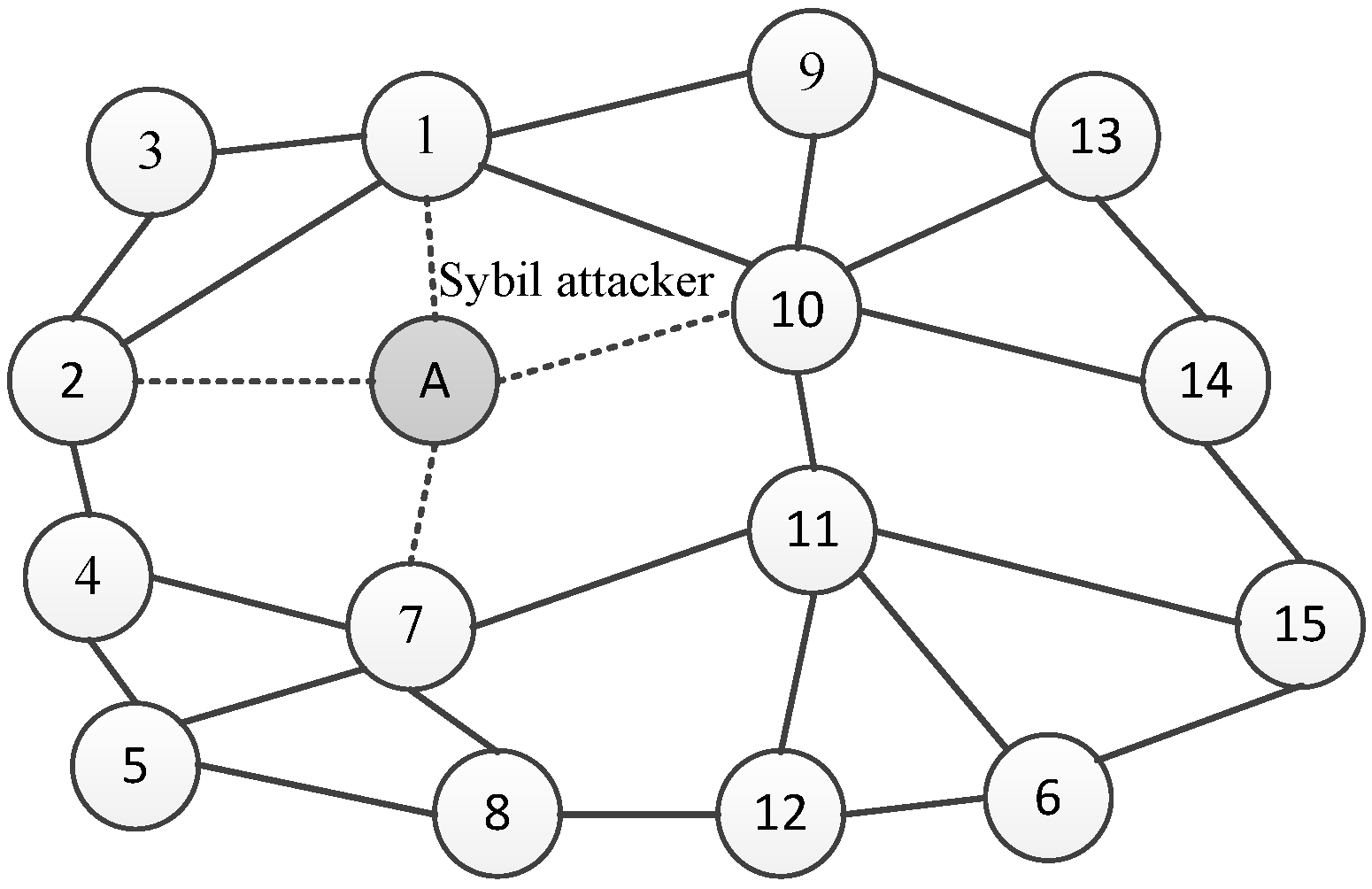
Multiple attack types:. Message manipulation attacks (e.g., replay attack, delay attack, and wormhole attack) and Sybil attacks (e.g., masquerade attack) are two common attack types for sensor networks [
18,
19,
20]. In message manipulation attacks, attackers can modify a time message to interrupt the synchronization process. For Sybil attackers, they pretend to be other nodes and send invalid messages.
The first problem can be solved by adopting a random time source mechanism [
23]: a node maintains a time source list and randomly selects its time source based on the quality of the potential time sources. The mechanism enables the node to maintain synchronization with the failure of a fixed time source. To address the second problem, two safeguard mechanisms can be designed for the hardware clock and the logical clock, respectively. Message manipulation attacks in the third problem have been well addressed by current technologies. However, existing secure time synchronization protocols seldom address the Sybil attacks.
Under Sybil attacks, the Sybil attacker in peer to peer networks can forge multiple identities including existing identities and virtual identities, which misleads the valid nodes into establishing a wrong neighbor list [
24,
25,
26]. In combination with sending invalid messages, Sybil attacks can easily attack many protocols in IWSNs, e.g., distributed storage, routing, data aggregation, fair resource allocation, voting, and so on [
24]. Therefore, Sybil attacks are one of the most harmful attack types in IWSNs [
24,
25,
26]. Some countermeasures against Sybil attacks have been proposed based on key management [
18,
27] and neighboring time information [
22]. However, they consume more computation, communication, storage, and hardware resources, which are not desirable for resource-constrained IWSNs. For time synchronization under Sybil attacks, if a Sybil attacker sends invalid time messages with different identities, the network synchronization can be disrupted easily. In existing time synchronization protocols against message manipulation attacks [
20,
21], a safe node disguised by the Sybil attackers would be regarded as a malicious node, and lose synchronization with other nodes. Moreover, due to the scalability and resilience to the node failure of physical attack and Denial of Service attack, decentralized time synchronization protocols are superior to centralized time synchronization protocols. Therefore, we focus on defending the distributed time synchronization protocol against Sybil attacks in this paper.
As indicated in [
28], each node has a unique clock skew value that differs from other nodes. Although the authors described the application of clock skew based node identification to detect Sybil attacks, the Sybil attacker may alter its own clock skew by faking timestamps and generating another identity, and then disables the detection. Moreover, it does not focus on time synchronization. Based on our observation, the relative clock skew of two nodes can be calculated by their common neighbor. Hence, we present a novel node-identification-based secure time synchronization (NiSTS) protocol against Sybil attacks. First, each node takes the relative skew with respect to the public neighbor as the judge to filter malicious information rather than shielding the suspicious nodes and then updates its clock with valid messages. The main contributions of this paper are summarized as follows:
- (1)
Based on the theoretical and simulation analysis, we prove that the logical clock error of the secured maximum consensus based time synchronization (SMTS) [
20] protocol under Sybil attacks linearly increases eventually with probability.
- (2)
Based on the timestamp correlation among different nodes and the uniqueness of a node’s clock skew, we utilize a relative skew checking mechanism to filter the fallacious messages in the design of NiSTS.
- (3)
We provide the effectiveness analysis of NiSTS, and the performance comparison in terms of energy consumption and security. Simulation results are conducted to prove the effectiveness of NiSTS.
The remainder of the paper is organized as follows:
Section 2 presents related work. In
Section 3, we briefly describe the system model and problem formulation.
Section 4 details the NiSTS protocol. Simulation is presented to validate the efficiency of the proposed protocol in
Section 5.
Section 6 concludes the paper.
4. NiSTS Protocol
Since all possible attacks cannot be prevented for all types of protocols, we would like to make the distributed synchronization protocol resilient to Sybil attacks. The proposed NiSTS consists of two parts: the detection process to filter malicious messages and the clock update process to realize time synchronization. Next, we detail the detection process, the design of NiSTS with the update rules, and the performance analysis.
4.1. Detection Process
Huang et al. [
28] pointed out that the clock skew error between each node and a fixed node is different and stable. In [
28], normal nodes synchronize their time with the fixed node, i.e., the root node
r. The clock skew error
is determined to be unique based on the observation in physical experiment. Obviously, the clock skew error
between the node
i and the absolute time
t is also unique. Thus, the stability and the uniqueness of the clock skew is valid in our study, and the relative clock skew of two nodes is constant.
Based on this observation, we utilize the uniqueness of relative clock skew between two nodes to detect the malicious messages. The relative clock skew is defined as
where
k denotes the
kth iteration. The message with identity
j is valid if and only if
. Under Sybil attacks, node
i cannot confirm the real
with mixed messages, which include valid messages and invalid messages. However, node
i can obtain the real
from node
c, who is a credible common neighbor of node
i and node
j. Therefore, the real
should satisfy
Now, node i can utilize the detection process to filter the invalid messages.
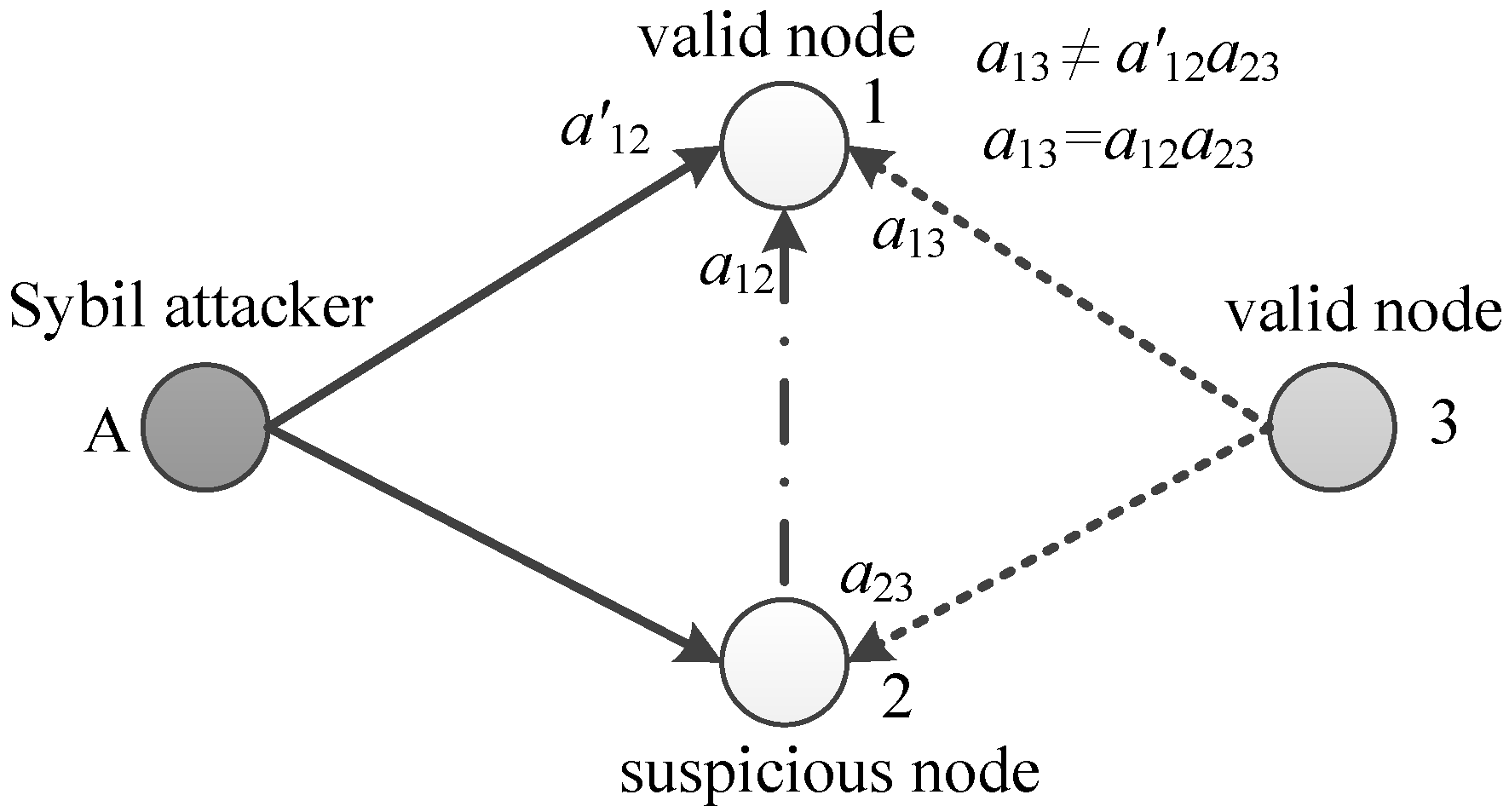
We use an example in
Figure 2 to illustrate the detection process. Consider a simple network with four nodes, where node
A is the Sybil attacker. Node
A can disguise itself as Nodes 1 and 2 to broadcast invalid messages, and Node 3 is the common neighbor of the two nodes. In
Figure 2, we assume that the Sybil attacker pretends to be Node 2. Node 1 can receive valid messages from Nodes 2, 3 and invalid messages from node
A, but cannot distinguish whether the message with identity 2 is valid. In our detection process, Node 1 and Node 2 calculate the relative skew
and
with real messages. Then, Node 1 evaluates whether the condition
is established. The condition is used to detect the invalid message from the Sybil attacker since it does not satisfy the equation, namely, the uniqueness of relative clock skew.
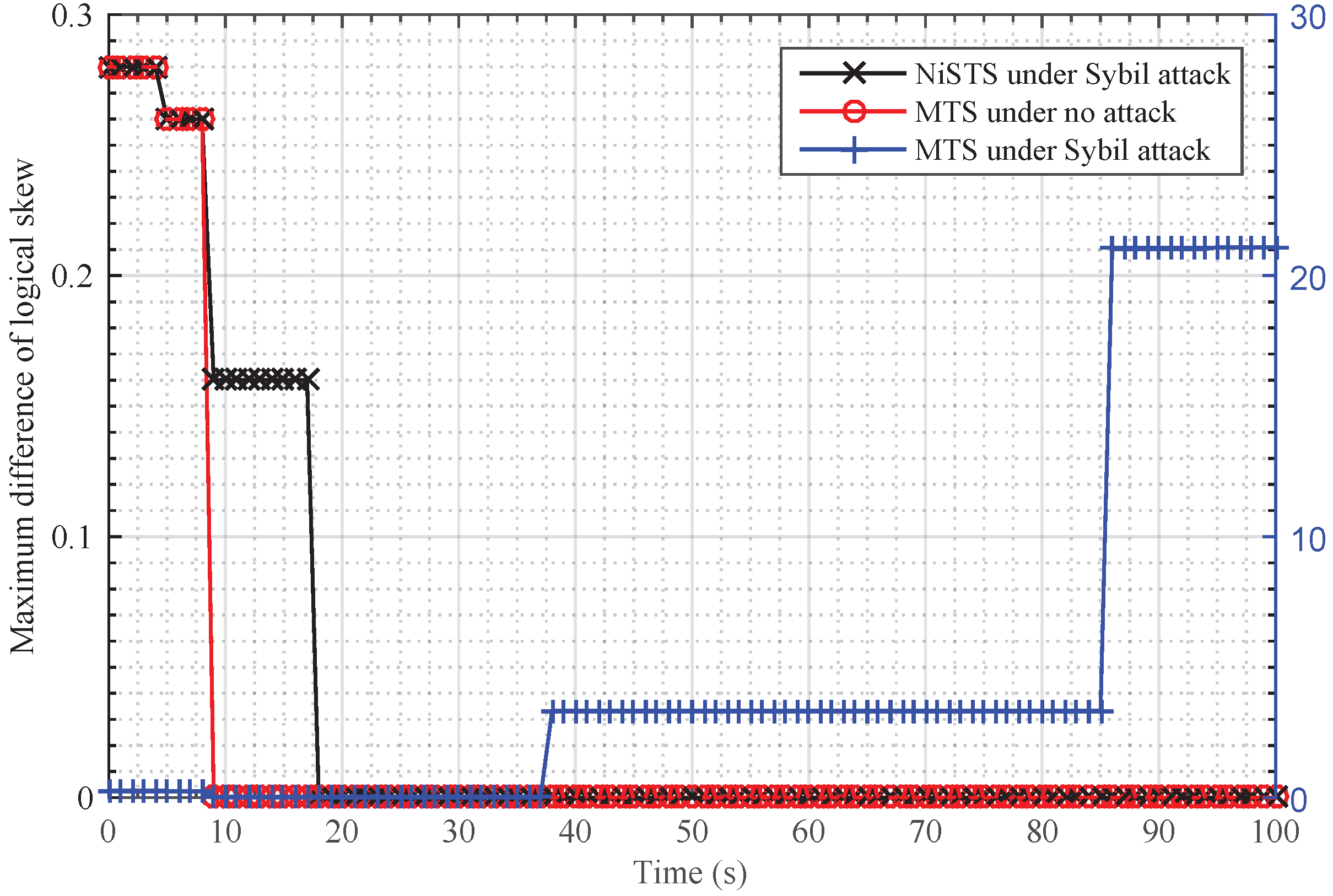
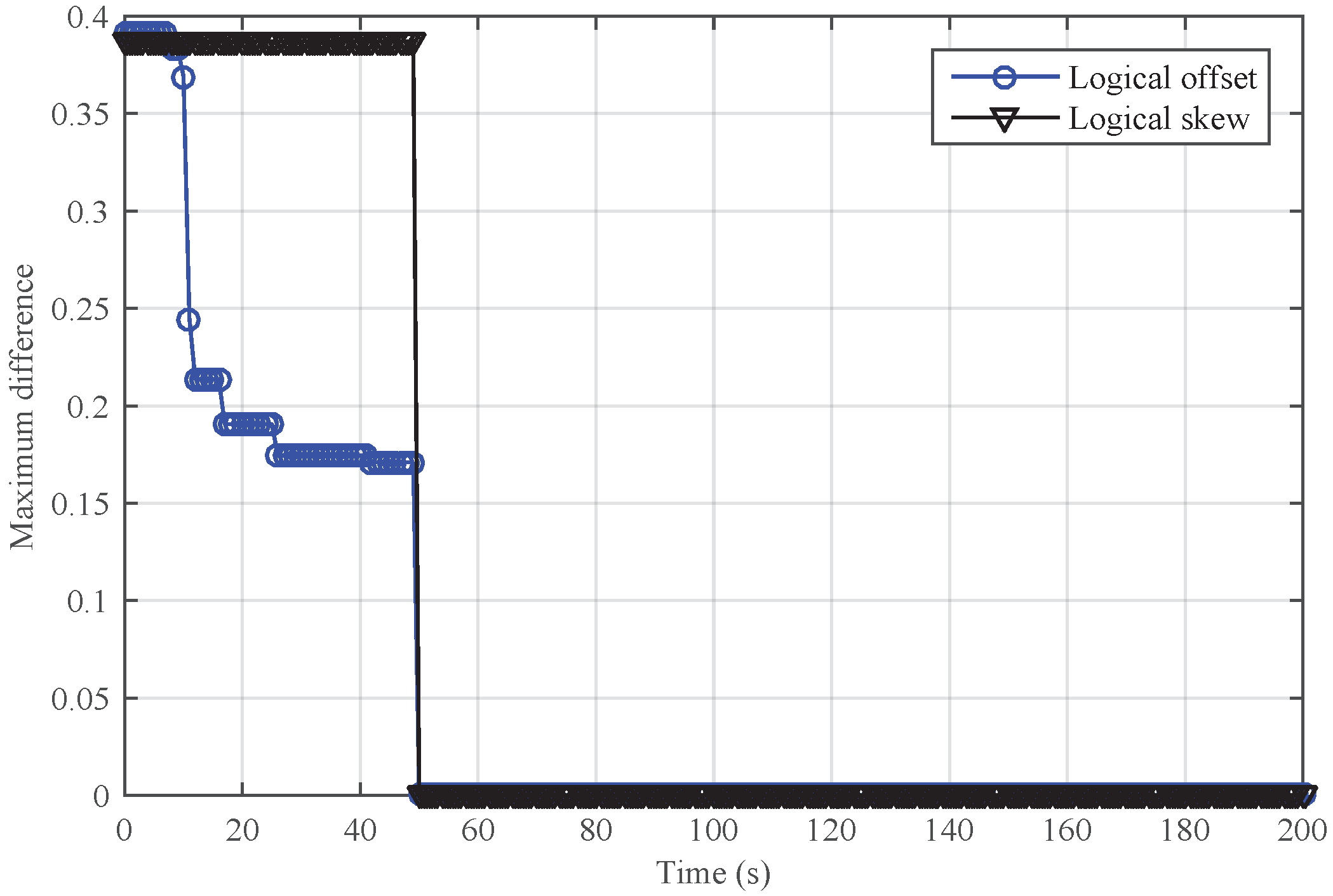
Figure 3 shows the effectiveness of our detection process. The blue line corresponds to the right ordinate. Our protocol NiSTS can achieve synchronization of the logical clock skew
under Sybil attacks.
In [
20,
21], Node 2 is directly regarded as a malicious node when Node 1 receives suspicious messages from Sybil attacker
A with identity 2, which is unfair for Node 2. Under the relative skew estimation (RSE) algorithm in SMTS [
20], the Sybil attacks would disable the communication between Node 1 and Node 2. However, it should be noted that the synchronization in [
20] can also be achieved here as the synchronous path along Nodes 1, 3, and 2 is not influenced. When Node 3 faces a disguised threat, the communication link along Nodes 1, 3, and 2 would lose efficacy, namely, SMTS is useless under Sybil attacks. More details on why SMTS fails under Sybil attacks are given in
Section 4.3.2.
Figure 2 is a simple example to illustrate our detection process. Unlike SMTS, our detection process continues to process the following messages of suspicious nodes instead of breaking up with the suspicious nodes, which increases the synchronization probability of suspicious nodes. The effectiveness of the detection process is detailed in
Section 4.3.1.
4.2. NiSTS Protocol Design
The maximum value of the clock parameters can easily be acquired via one comparison but the acquisition of the average value requires multiple iterations. Thus, we develop the secure time synchronization protocol based on the MTS protocol. The pseudo code of NiSTS protocol is described in Algorithm 1.
| Algorithm 1 NiSTS protocol. |
| Input:, , , T, , , , . |
| Output:, , . |
| 1. , if , node i broadcasts and . |
| 2. Upon receiving time information from node j, node i records . |
| 3. Node i estimates with (4) when it has a historical record . |
| 4. If or , : |
| node i stores without any updating. |
| else if : |
| node i stores , and updates . |
In our protocol, each node maintains a neighbor repository to store the latest time information about its neighbor, including the logical clock skew and offset compensation parameters, hardware time, and the relative clock skew with respect to its neighbor. When each node is powered on, the time information of each node must be initialized, namely, set , , and . If the current hardware time of node i satisfies the condition , where T is the predefined broadcast period, i broadcasts its current time information and . At each iteration, when node i receives a time message from its neighbor j, it records its logical clock skew and offset compensation parameters and the hardware clock reading. If it has a historical record of node j, then it computes the relative skew .
In the detection process, node i checks whether is equal to , where c is the common valid neighbor of node i and node j. If , the time message with identity j is valid, and node i will update their logical clock parameters with the valid message. The update rules are described as follows:
If
:
else if
:
Since each node periodically transmits the time information at a predefined interval
T based on its hardware clock, the absolute transmission time of node
i is
. Each hardware clock skew
is different [
6], and the value of
is constant. Thus, each
is different, i.e., the transmission mechanism of time information is asynchronous transmission. Asynchronous transmission avoids the channel collision and reduces the communication overhead. At each iteration, each node synchronizes its logical clock to the faster clock of its neighbor clocks based on the update rules. The global time synchronization is achieved with Equation (
3).
Here, MAC layer time stamping is used to eliminate the uncertain delay in the sensor nodes [
12,
14], and the distance between two neighbor nodes is limited. Thus, we assume that the communication delays are constant.
4.3. Performance Analysis
In this subsection, we analyze the effectiveness of the detection process, and detail the performance comparison.
4.3.1. Analysis of the Detection Process
In the detection process, when two nodes confirm the validity of the messages from each other, they need to rely on a valid common neighbor. Thus, the number of common neighbors influences the performance of the NiSTS protocol. We employ a theoretical analysis to illustrate the effectiveness of the NiSTS protocol.
Consider an IWSN with
n safe nodes and
m Sybil attackers. All nodes are randomly deployed over an
square area. The communication range of each node is set to
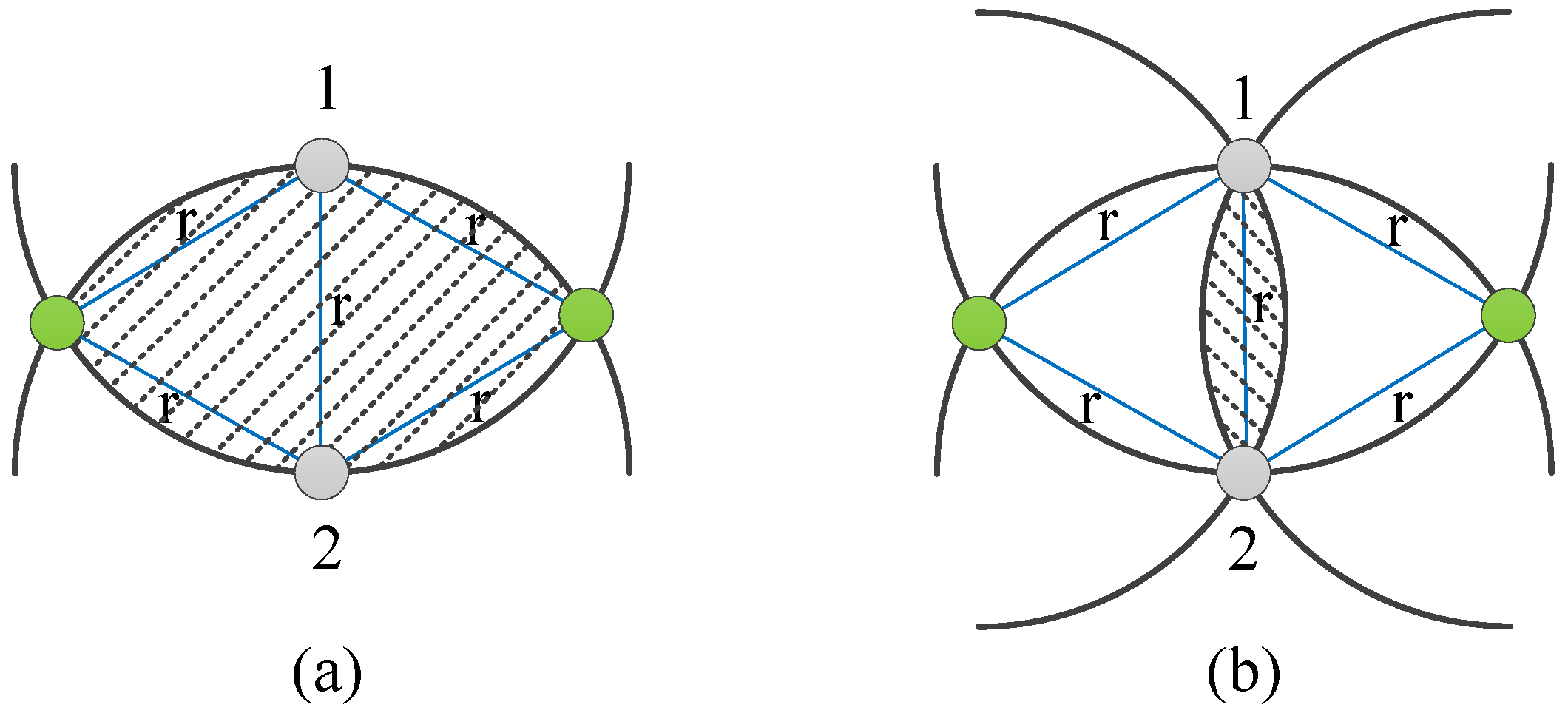
r. As shown in
Figure 4a, the nodes in the shadow area can hear the messages from the two adjacent Nodes 1 and 2 with the farthest distance
r. The green nodes are the two farthest common neighbors of Nodes 1 and 2. Thus, the minimum number of common neighbors of any two adjacent nodes is
. In the worst-case scenario, all common neighbors are suspicious nodes, and the detection process in NiSTS risks failure. As shown in
Figure 4b, Sybil attackers in the shadow area can disguise themselves as all common neighbors of Nodes 1 and 2. The number of Sybil attackers in the shadow area is
.
We develop the following equation:
where
is a probability factor that indicates the effectiveness of NiSTS. When
, the reliability of NiSTS can exceed 90% probability. At this time, the number of Sybil attackers may be limited to
. Thus, the NiSTS protocol can defend against more Sybil attackers with a larger network area and a less communication power.
Next, we detail the probability analysis of the proposed NiSTS protocol risking failure in the worst-case scenario. The detection process is effective under the condition that at least a credible common neighbor exists between Node 1 and Node 2, as shown in
Figure 4. During the current detection process
,
, the common node
c is credible means that the relative clock skews
and
are both valid. Meanwhile, the faked identity of a Sybil attacker is randomly selected from the attacker’s neighbor, namely, the probability that node
c is disguised during one period is
by an attacker. As the relative clock skew is calculated by using two consecutive time messages and the number of Sybil attackers in the worst-case scenario is
, the probability that the common node
l is credible during two consecutive periods is
. When all the common nodes are disguised during these two consecutive periods, the detection process is out of work. Thus, the probability is
for
common neighbors.
As presented in the previous section, , it is obvious that and . Hence, the probability is that the current detection process fails in a dense network. Because NiSTS algorithm does not isolate the suspicious nodes, the detection process will not be interrupted. Therefore, with the increasing of the iterations N, the failure probability of the algorithm approaches 0, i.e., . The validity of the algorithm is proven indirectly. Hence, the NiSTS protocol will be more effective in a dense network with more common neighbors.
4.3.2. Performance Comparison
Low-energy and security are key technologies for IWSNs that are usually working in an unattended environment. It is well known that the computational energy cost of MTS based updating algorithms is comparably small [
13], and the communication energy consumption occupies main energy cost in sensor nodes [
4]. Moreover, the nodes exchange messages frequently in distributed timesync protocols. Hence, the communication energy cost, which can be analyzed by the broadcasting times [
4,
13,
20], is an intuitive illustration of the protocol energy consumption. As the nodes broadcast local clock information periodically at a given time interval, the broadcasting times is proportional to the convergence time of the timesync protocol, and then a shorter convergence time reveals a lower energy consumption. The energy consumption can be further analyzed by the convergence time of protocols. Therefore, in this subsection, we focus on the performance comparison of the convergence time and the security of NiSTS with the performance of the convergence time and the security of MTS and SMTS in three cases: no attack, message manipulation attacks and Sybil attacks. Here, time synchronization refers to the synchronization of safe nodes.
Case 1:
Under no attack. Based on the previous analysis, MTS is effective in a benign environment, with the convergence time
[
13], where
B denotes that the message broadcast occurs twice during the period, i.e., MTS updates its clock parameters with each
,
. SMTS achieves time synchronization with the verification mechanism
,
. NiSTS realizes synchronization with the message filtering process
, i.e., NiSTS starts with at least three relative clock skews, where
. NiSTS needs additional time information about the neighbors to start. Thus, the convergence time of MTS is the shortest, and the convergence time of NiSTS is the longest.
Case 2:
Under message manipulation attacks. A message manipulation attacker broadcasts the error hardware clock reading to its neighbors. Thus, the relative clock skews that are computed by the receiving nodes are invalid. In [
20], the authors presented a detailed theoretical and simulation analysis to illustrate that MTS would be invalid under message manipulation attacks; thus, we do not repeat it here. In SMTS, the linear clock model is utilized to check the consecutiveness of the neighbor hardware clocks at each iteration. Each node shields the attackers when
,
. Since the detection process of NiSTS is also based on the valid relative clock skew, NiSTS is also valid under manipulation attacks with a longer convergence time.
Case 3: Under Sybil attacks. A Sybil attacker randomly pretends to be its neighbor to advertise falsified time information. Similarly, MTS is invalid under Sybil attacks. In SMTS, the messages from suspicious node could not pass the verification process , . The safeguard mechanism will deem the node as an attacker, and break up with the node by ignoring all its following messages. In fact, the suspicious node is a safe node that needs synchronization. Hence, under Sybil attack, SMTS is disabled and renders the networks out of synchronization with probability, which is given by the following theorem.
Theorem 1. The logical clock error of SMTS under Sybil attacks linearly increases at last with probability, i.e.,where, D is a time constant, and A and C are the maximum differences of the logical clock skew and the logical clock offset of the safe nodes, respectively. Proof of Theorem 1. From Definition 1 of the suspicious node, we divide the safe nodes of WSNs into valid nodes and suspicious nodes. Let
,
, and
denote the sets of valid nodes, suspicious nodes, and isolated nodes, respectively. As shown in
Figure 5a, the neighbors of the Sybil attackers are called potential suspicious nodes. These potential suspicious nodes become real suspicious nodes when they are disguised. Due to the safeguard mechanism in SMTS, the communication link is interrupted when two nodes are both suspicious nodes. For example, Node 1 and Node 2 cannot communicate with each other, as shown in
Figure 5b. For two potential suspicious nodes, their communication becomes a unidirectional communication when only one node is a suspicious node, as shown in
Figure 5c. Hence, the communication network of SMTS under Sybil attacks consists of two types.
Figure 5b,c shows the pruned networks when suspicious nodes exist. We analyze the synchronization process of SMTS under Sybil attacks in these two scenarios.
- (1)
At least one isolated node, which cannot exchange messages with other nodes, exists, as shown in
Figure 5b. Thus, the clock information about the isolated nodes remains unchanged, and the maximum differences of the logical skew and the logical offset of the safe nodes are
and
, respectively.
- (2)
No isolated nodes exist. However, since suspicious nodes cannot pass the safeguard process of SMTS, a suspicious node can only receive messages but cannot transmit messages, as shown in
Figure 5c. The valid nodes easily achieve synchronization. For suspicious nodes, when
, suspicious nodes can synchronize the valid nodes based on Equations (6)–(8). When
, the clock state of node
q remains unchanged. Therefore, the maximum differences of the logical skew and offset of the safe nodes are
and
, respectively.
Here, D denotes the synchronization time of the safe nodes. The logical clock error of SMTS increases linearly after the constant time D. Therefore, the theorem holds. ☐
Unlike SMTS, our protocol NiSTS filters the invalid messages instead of isolating the suspicious nodes. The above analysis reveals that the synchronization process of NiSTS is the same under no attack, manipulation attacks, and Sybil attacks. Thus, NiSTS is not sensitive to attack types. Nevertheless, NiSTS would increase the communication overhead with longer convergence time.
Compared with [
22], NiSTS does not need to allocate additional memory space to store the most recent
M time messages for each neighbor. In the detection process of NiSTS, it just needs to store the latest time message and assesses whether the received message is valid based on Equation (
5). As there are multiple common neighbors between the node
i and its neighbor
j, NiSTS can distinguish an invalid message with a maximum of
times multiplication. For [
22], the time complexity is
.
5. Evaluation
In this section, we present simulations to evaluate our method under different attack types in comparison with MTS [
13] and secured maximum-consensus-based time synchronization (SMTS) [
20]. The following simulations were conducted in Matlab R2015a.
We considered an IWSN with 30 nodes, which are randomly deployed in a
area. The parameters of each node were set as follows [
13,
20]: the communication range is
; the logical skew and offset compensation parameters are 1 and 0 s, respectively; the clock skew and offset are randomly selected from 0.8–1.2 and 0–0.4 s, respectively; and the broadcast period
T is 1 s. Additionally, each node is equipped with a 32.768 kHz crystal oscillator. The probability factor
is 0.1. Hence, the maximum number of Sybil attackers in this IWSN is 5. We applied the maximum difference of the logical clock skew
and the maximum difference of the logical clock offset
to represent the synchronization precision. All safe nodes achieve synchronization if and only if
and
. Since the logical clock skew and offset simultaneously update, they also converge synchronously.
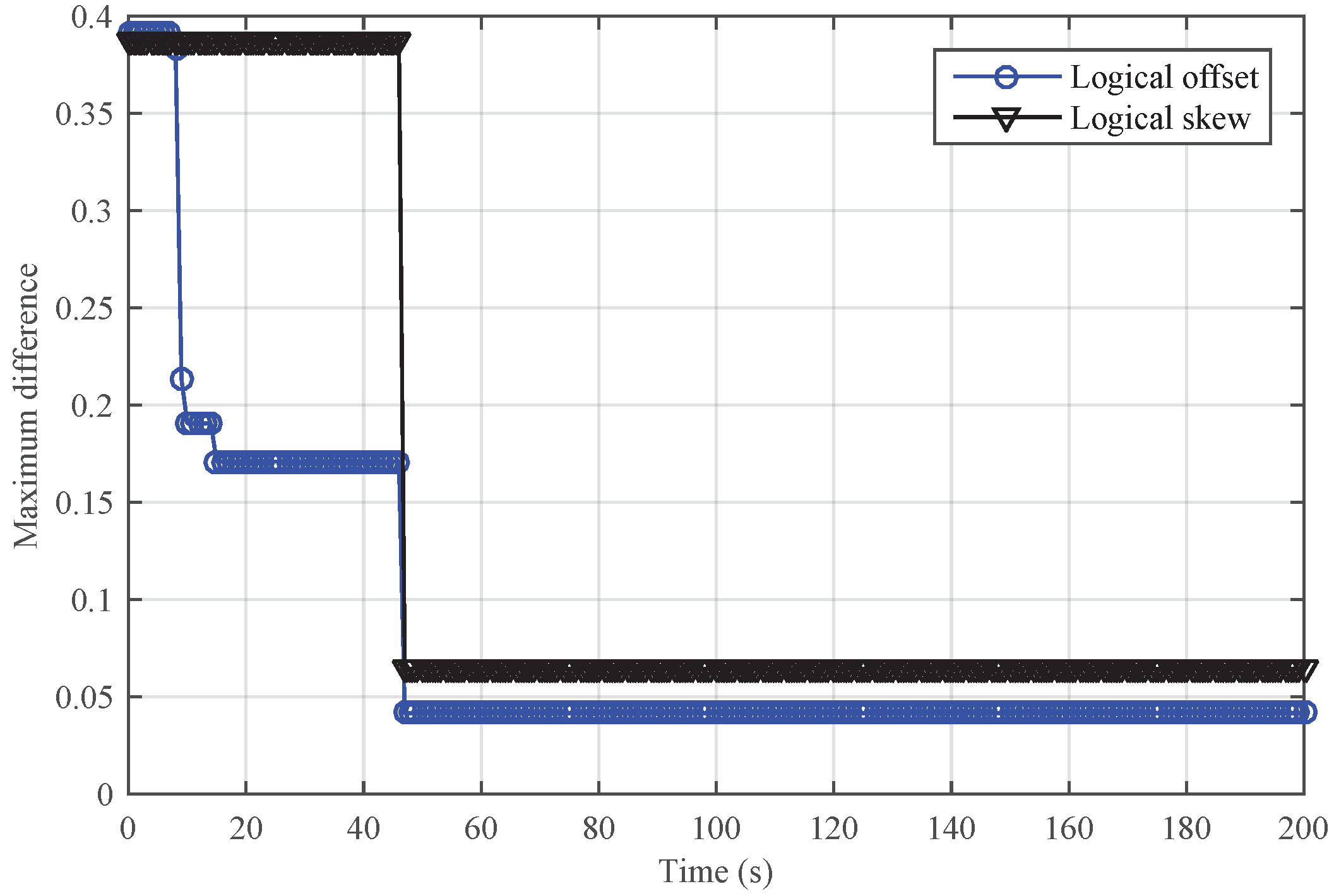
First, we applied these protocols in a reliable environment.
Figure 6 and
Figure 7 demonstrate that all protocols could achieve logical clock skew and offset synchronization simultaneously in a reliable environment because all nodes are valid. As the update rules are same for MTS, SMTS, and NiSTS protocols, the convergence time of each protocol is determined by the updating start time of logical clock parameters. Furthermore, each protocol starts updating based on the computed relative clock skew
. For MTS, it starts the updating once obtaining one relative clock skew with one neighbor, namely,
,
. SMTS adds a detection process to check whether the received messages is valid before updating, namely,
,
. For NiSTS, it adopts three relative clock skews to detect invalid messages before updating, namely,
,
. Therefore, the convergence rate of MTS is the fastest; conversely, NiSTS’s convergence rate is the slowest. Because the logical clock skew and offset converge simultaneously, we employed the logical clock skew to denote the synchronization performance in part of the following simulation analysis.
We set Nodes 4, 11, and 23 as the message manipulation attackers. Assume that they broadcast the invalid time message
every five cycles, where
denotes the attack power and is randomly selected within 0–0.01 s. With the existence of malicious nodes, the safe nodes in MTS estimate
according to invalid time messages, and then the updating rules will be destroyed. For SMTS and NiSTS, they update the clock based on the uniqueness of relative clock skew. Invalid time messages could not pass their detection process. Hence, the logical clock skew in MTS could not converge under messages manipulation attacks. SMTS and NiSTS are robust against the message manipulation attacks, as shown in
Figure 8. Similar to the above analysis, NiSTS updates its logical clock after computing the relative clock skew with two neighbors at least three times, whereas SMTS only needs to compute the relative clock skews with one neighbor at least two times, so the convergence time of NiSTS is longer than that of SMTS. Meanwhile, SMTS can isolate the malicious nodes to synchronize fewer nodes in IWSNs, which would accelerate its convergence.
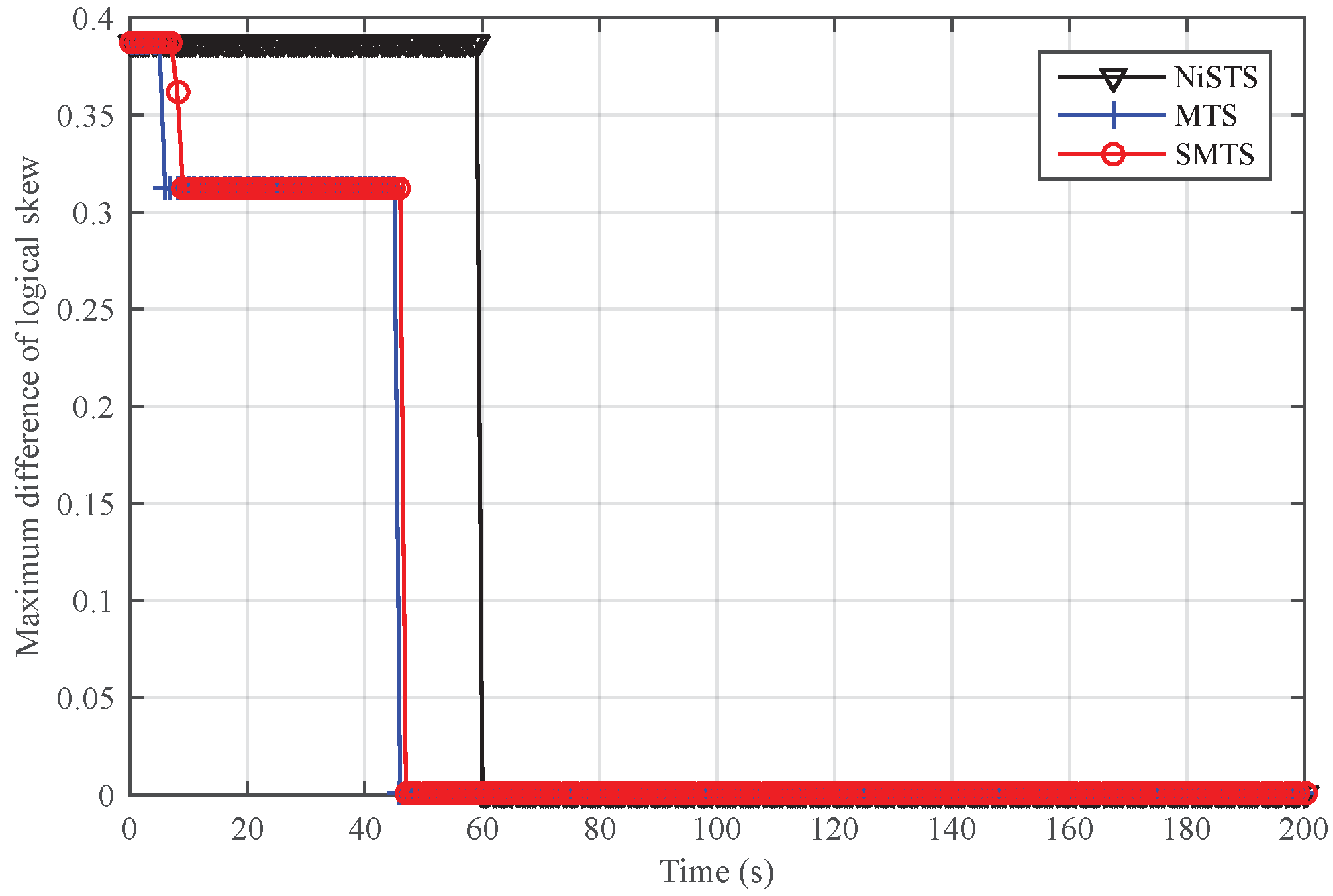
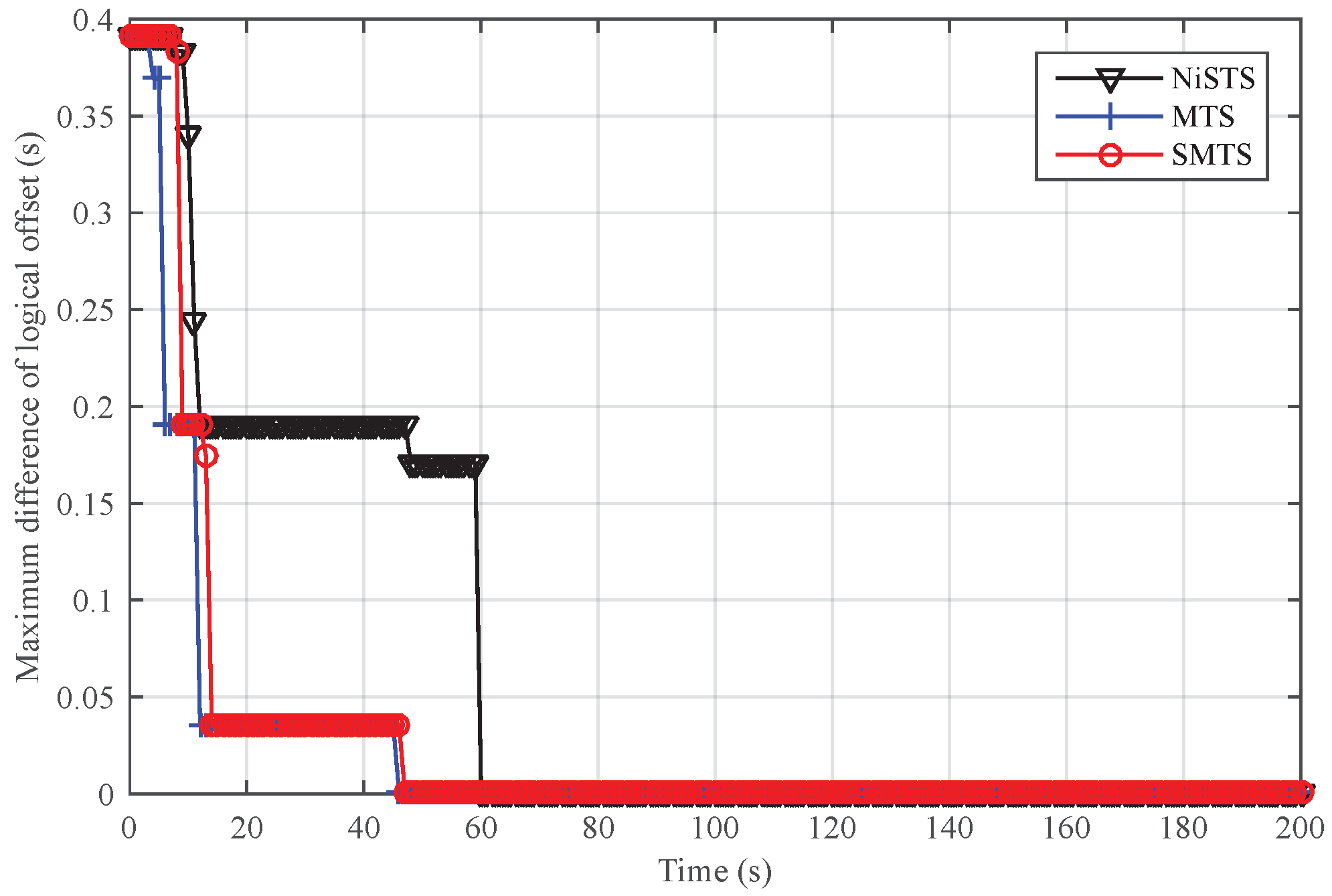
Figure 9 and
Figure 10 show the performance of SMTS and NiSTS under Sybil attacks, respectively. Here, we also set Nodes 4, 11 and 23 as the Sybil attackers who broadcast an invalid time message every five cycles with a false identity. The identity of the attackers is randomly selected from their neighbors. Under Sybil attacks, the safe nodes disguised by the attacker (namely, the suspicious nodes) would be regarded as malicious nodes in SMTS, and then SMTS would breaks up with the suspicious nodes. For NiSTS, it will not disrupt the communication with the suspicious nodes. The synchronization process continues when the messages of suspicious nodes pass the detection mechanism. Therefore, NiSTS is effective under Sybil attacks but the maximum errors of the logical skew and the logical offset of SMTS converge to two constant values, respectively. From the results in
Figure 9, we conclude that the logical clock error of SMTS initially decreases but then linearly increases, i.e., Theorem 1 is indirectly approved. Meanwhile, the convergence time of NiSTS is slightly longer than that of SMTS, as the updating start time of NiSTS is later that of SMTS.
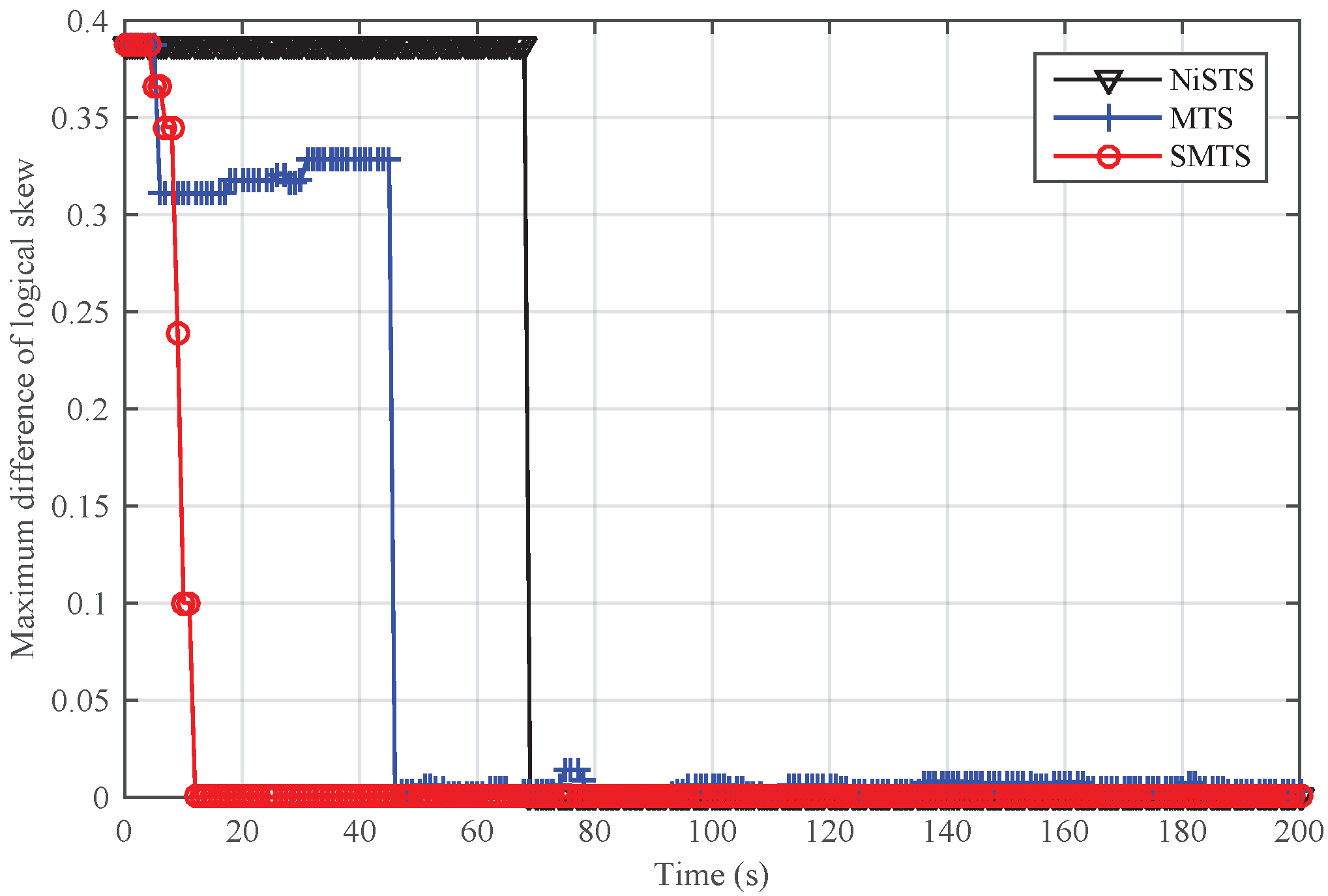
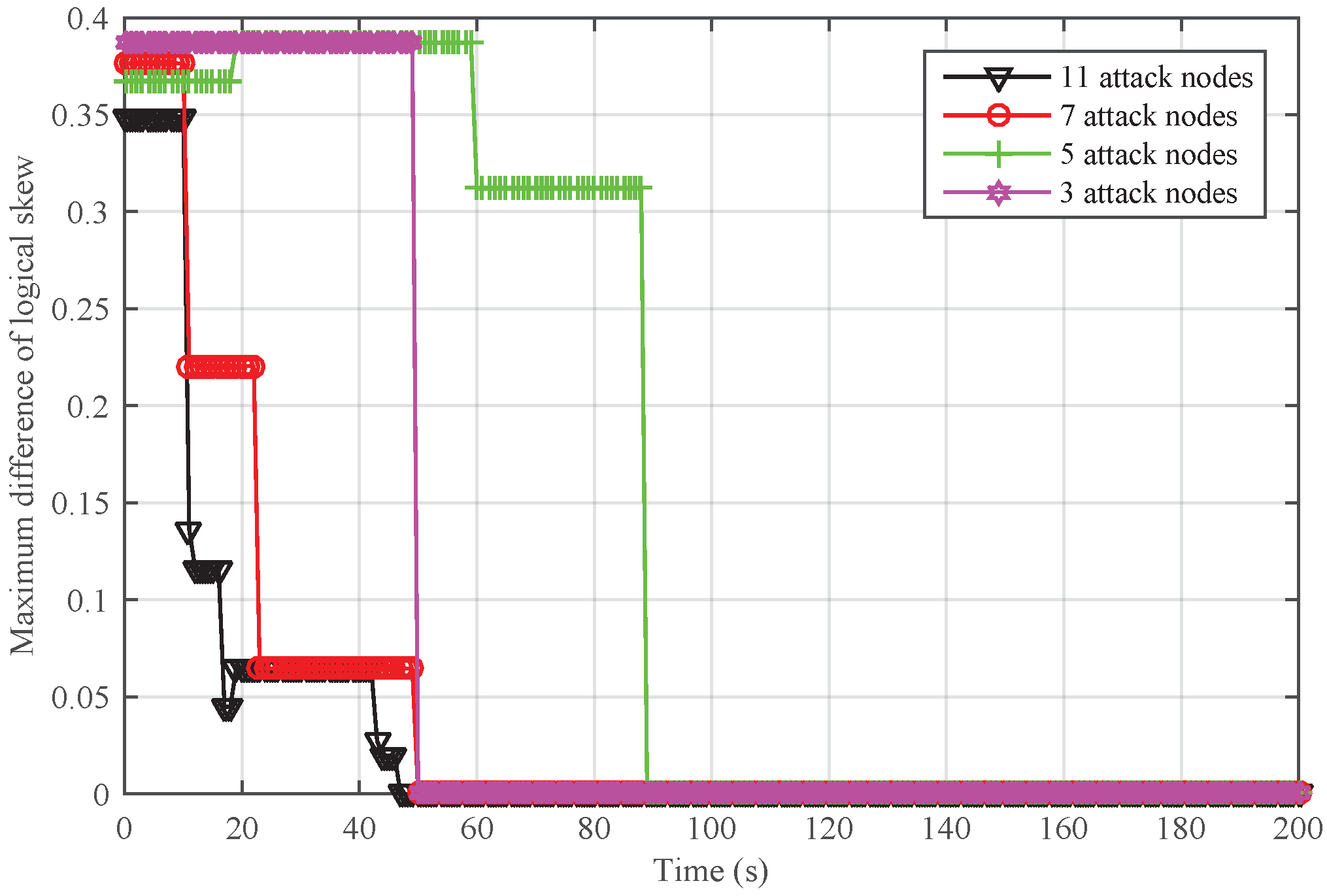
To further analyze the scenario that Sybil attackers are generated from the inside network, we adjusted the number of attack nodes and safe nodes for a given network. The total number of nodes was set to 30. We randomly chose 3, 5, 7, and 11 attackers from the network. In
Figure 11, it can be seen that NiSTS could also realize time synchronization and may defend against more attackers.
Next, we conducted simulations to reveal the impact of the number of Sybil attacker on NiSTS. The probability factor
is 0.2. Thus, the maximum number of Sybil attackers is 11. We considered four scenarios with 3, 5, 7, and 11 attackers, respectively. The total number of safe nodes in each scenario was set to 30. The initial clock parameters and location information of the safe nodes in these four network scenarios are same. To better illustrate the effectiveness of NiSTS, the attack period was reduced to two cycles. The attacker power was also randomly selected within 0–0.01 s.
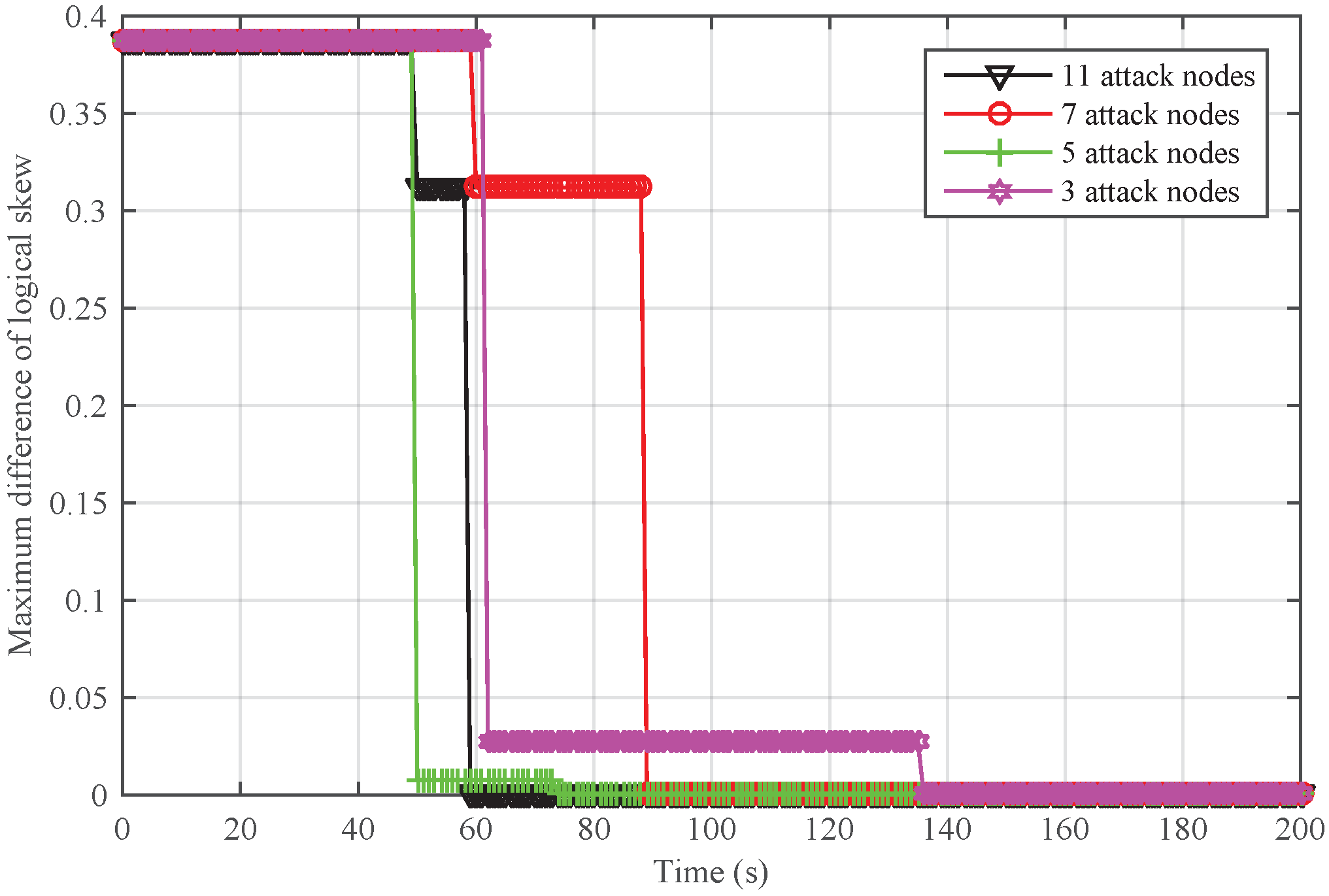
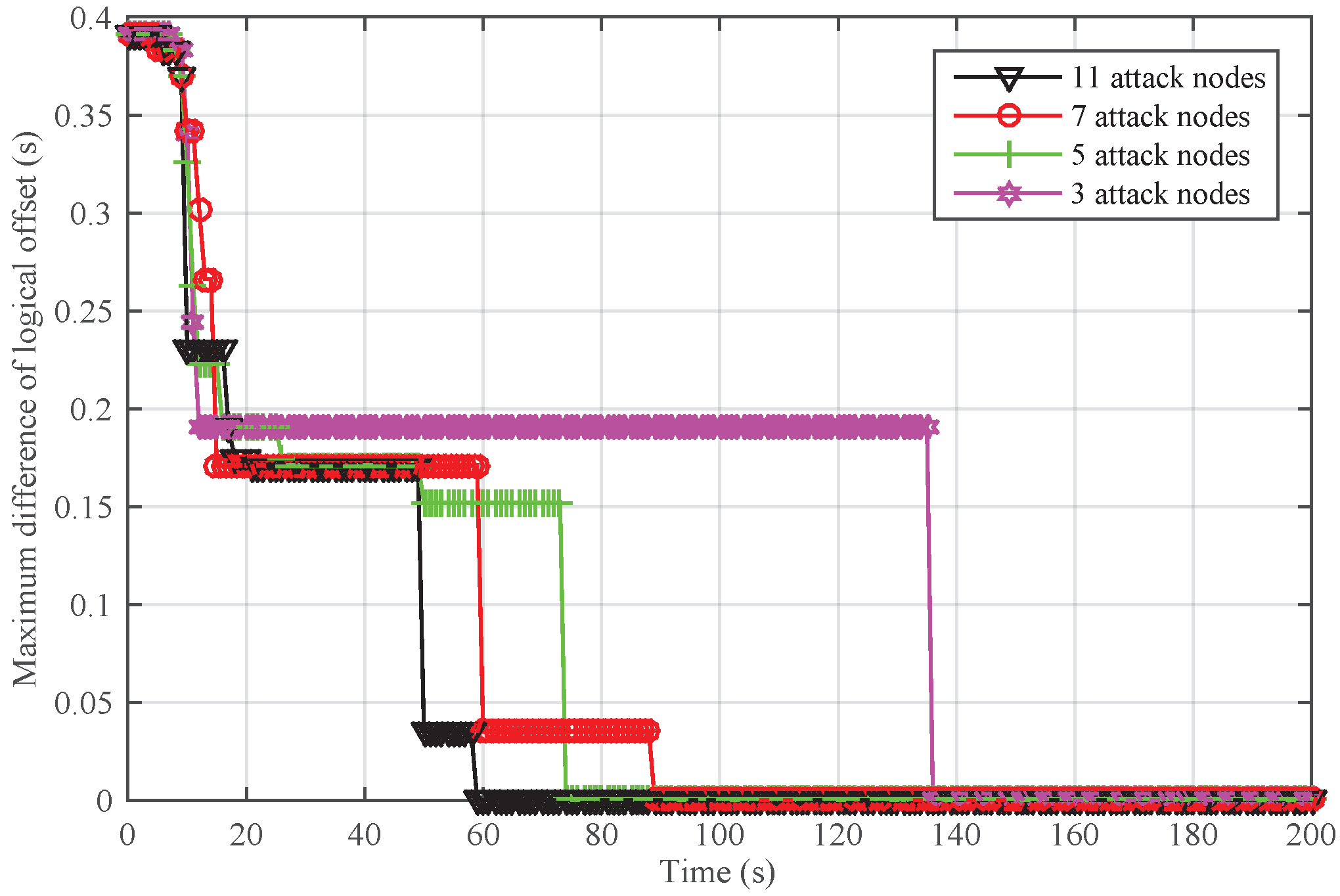
Figure 12 and
Figure 13 demonstrate that adding attack nodes has no influence on the convergence of NiSTS.
As the attackers randomly select identities from their neighbors, the synchronization path is interfered. Thus, the convergence time of NiSTS for a given network under Sybil attacks is not a constant value. Of course, fewer Sybil attackers may bring longer convergence time. In
Figure 12 and
Figure 13, it can be seen that there is no relationship between the convergence time and the number of Sybil attackers. Therefore, the simulation results reveal that the convergence time of NiSTS is not sensitive to the number of attackers with a given
.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}