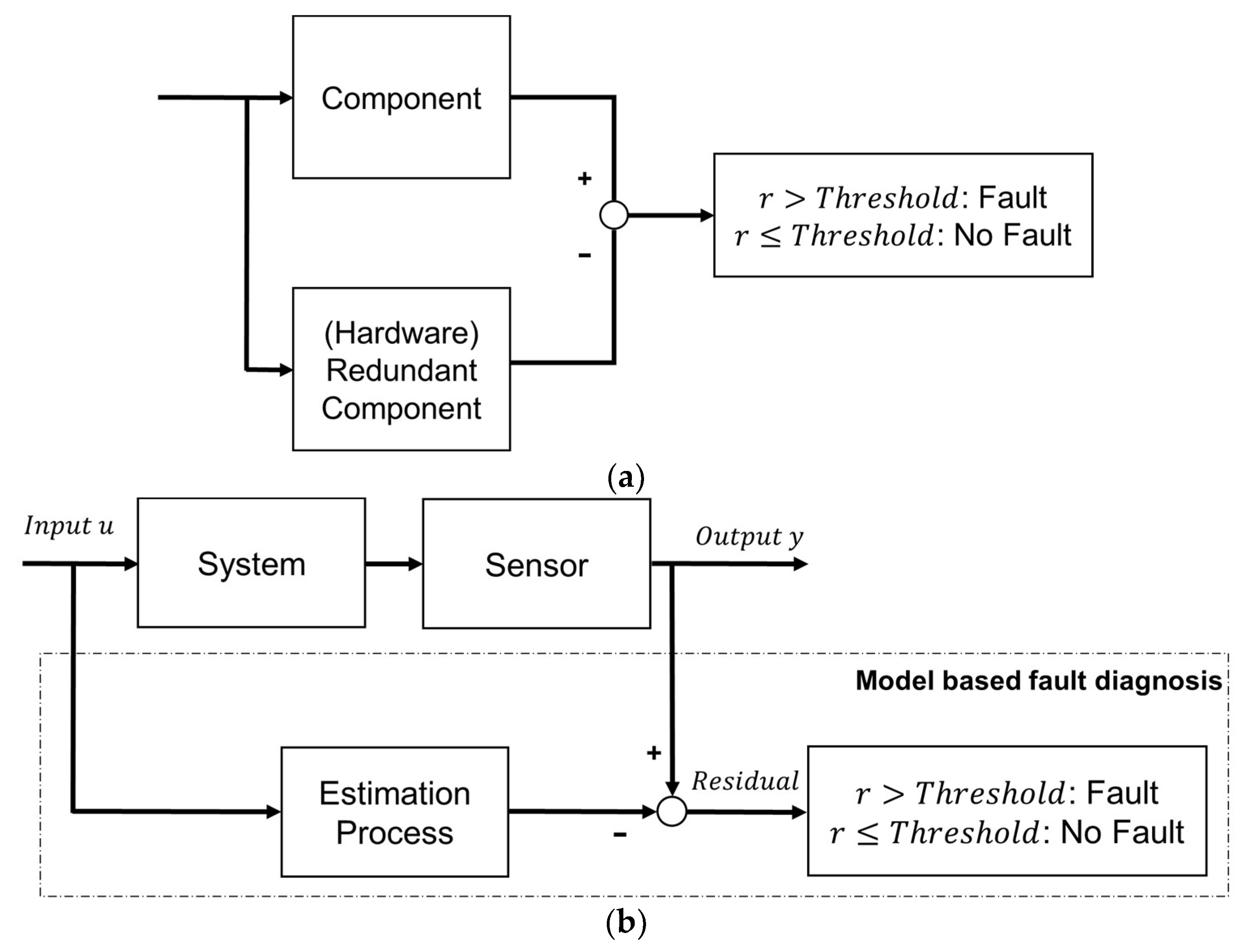
Figure 1.
Hardware and analytical redundancy scheme. (a) Hardware redundancy scheme; (b) analytical redundancy scheme.
Figure 1.
Hardware and analytical redundancy scheme. (a) Hardware redundancy scheme; (b) analytical redundancy scheme.
Figure 2.
Residual calculation with output error and polynomial method. (a) Output error method residual calculation; (b) polynomial error method residual calculation.
Figure 2.
Residual calculation with output error and polynomial method. (a) Output error method residual calculation; (b) polynomial error method residual calculation.
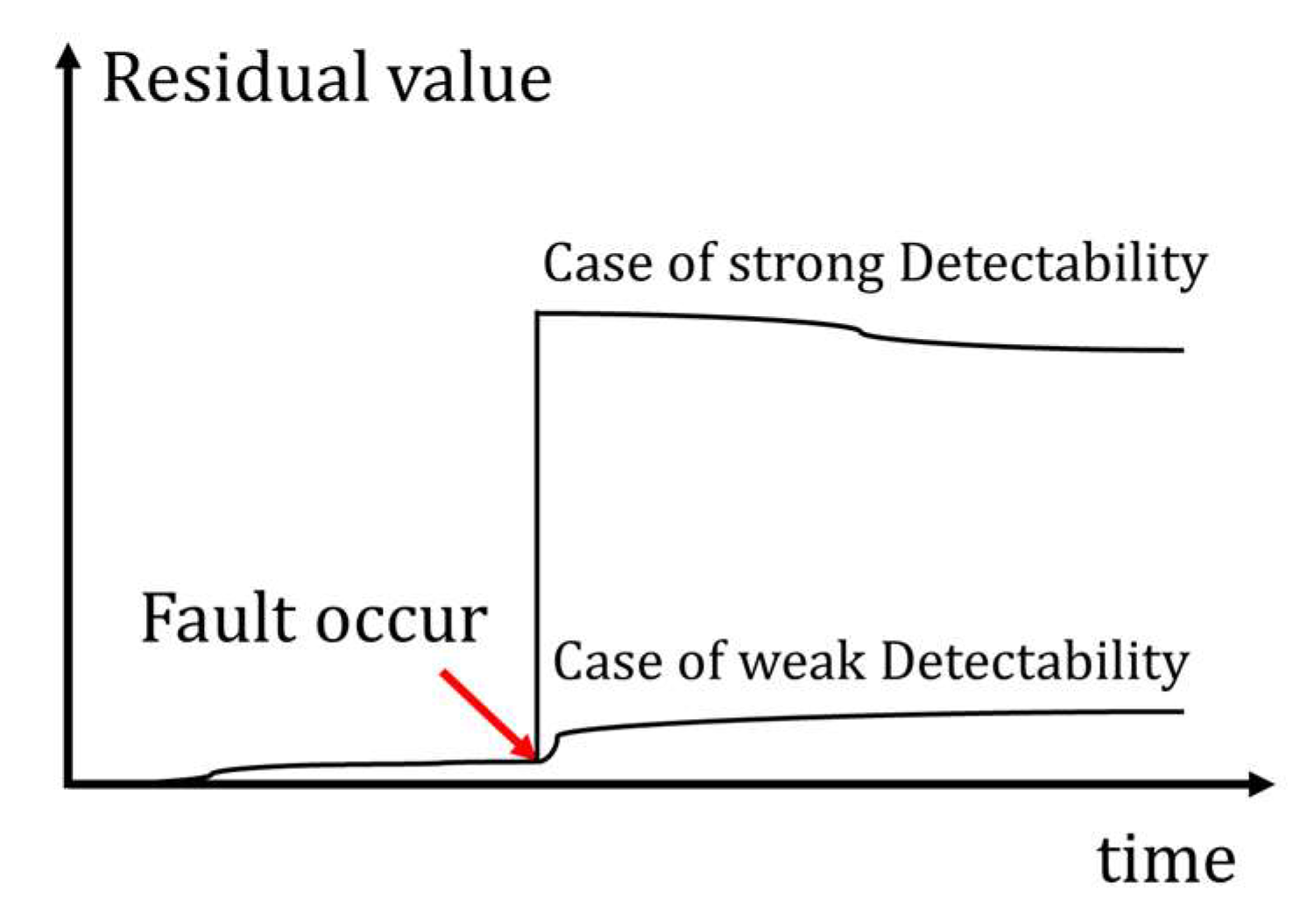
Figure 3.
Fault detectability (strong/weak).
Figure 3.
Fault detectability (strong/weak).
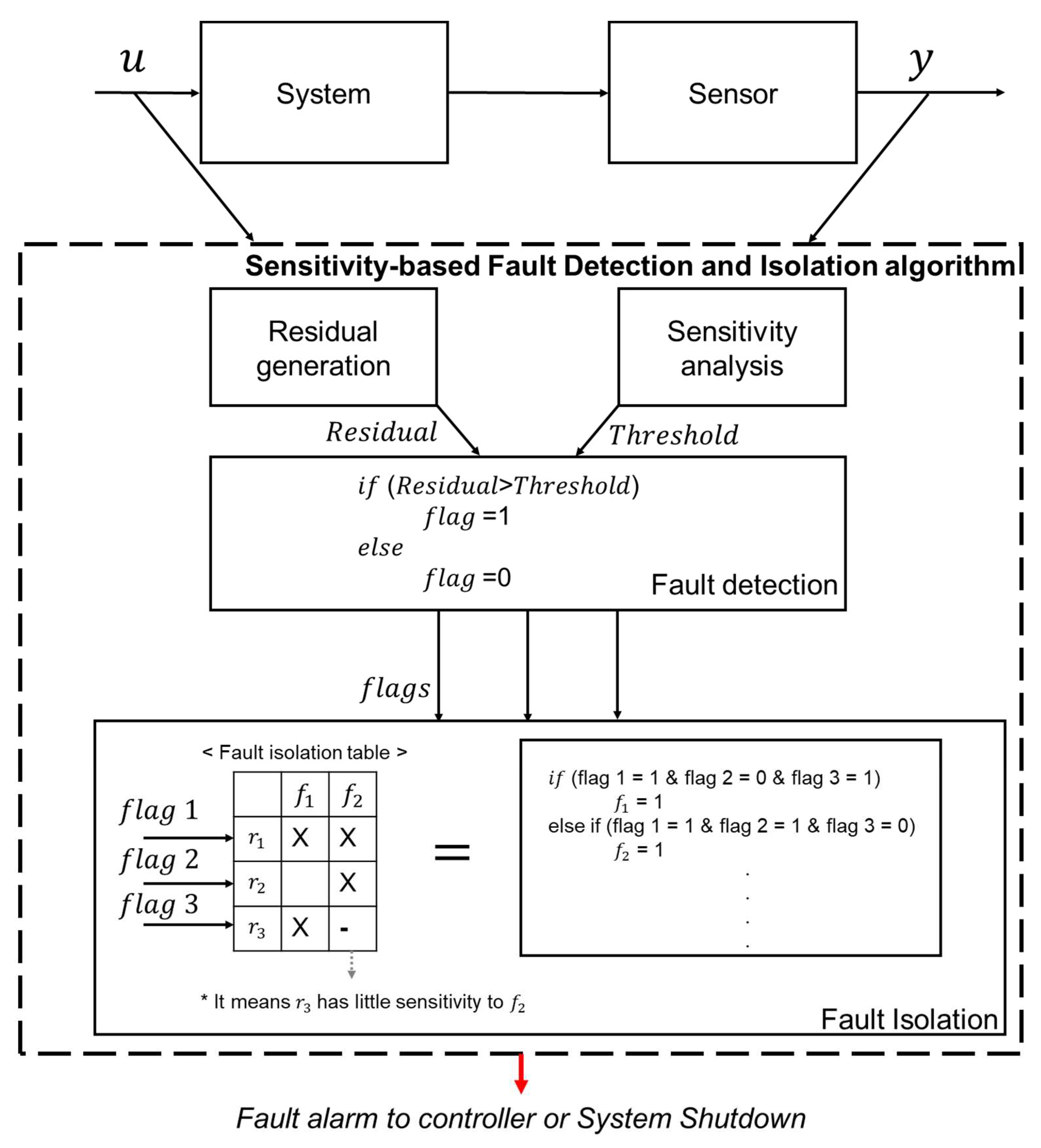
Figure 4.
Sensitivity-based fault detection and isolation algorithm scheme.
Figure 4.
Sensitivity-based fault detection and isolation algorithm scheme.
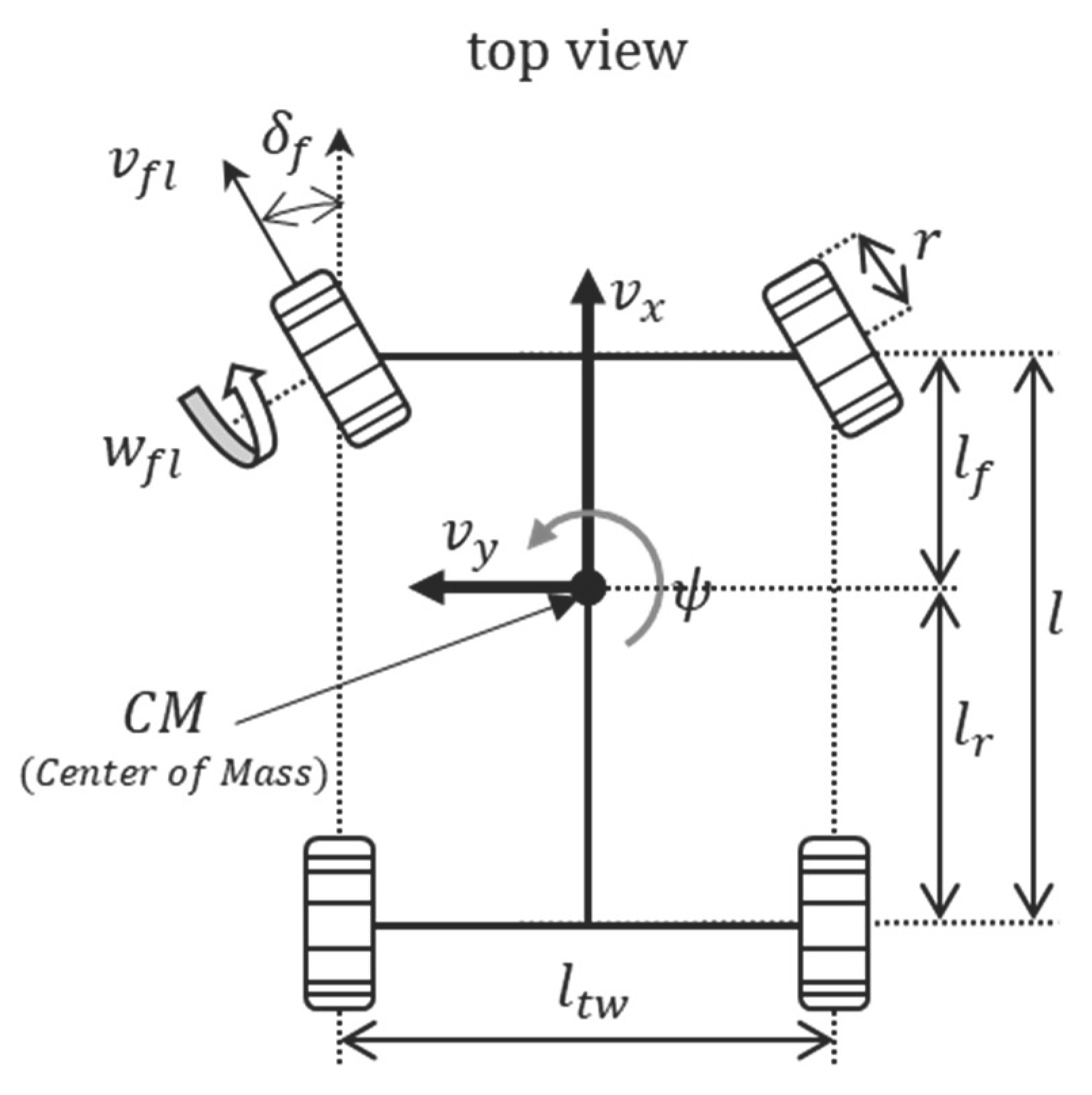
Figure 5.
Vehicle wheel scheme.
Figure 5.
Vehicle wheel scheme.
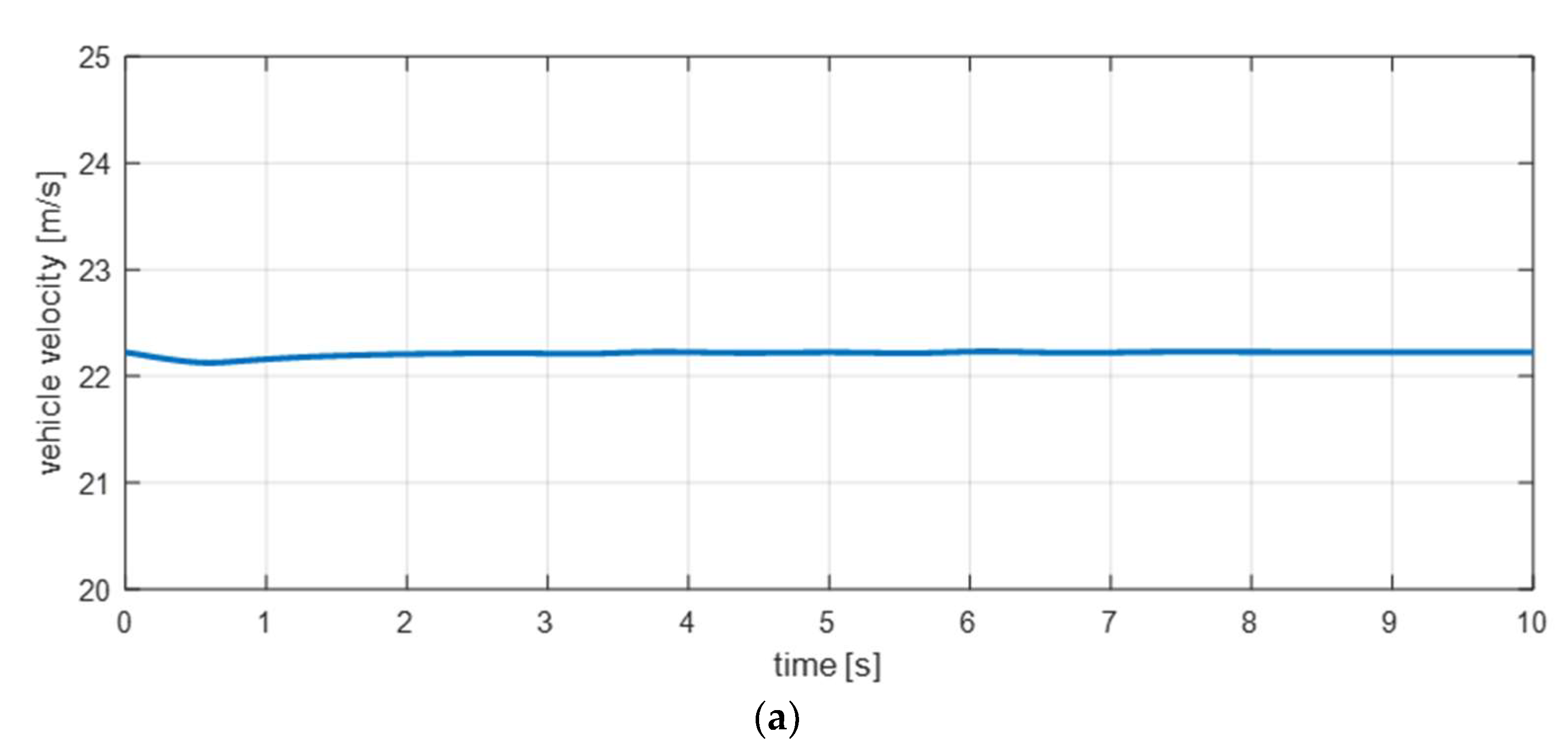
Figure 6.
Estimation simulation scenario 1. (a) Vehicle speed; (b) steering wheel angle.
Figure 6.
Estimation simulation scenario 1. (a) Vehicle speed; (b) steering wheel angle.
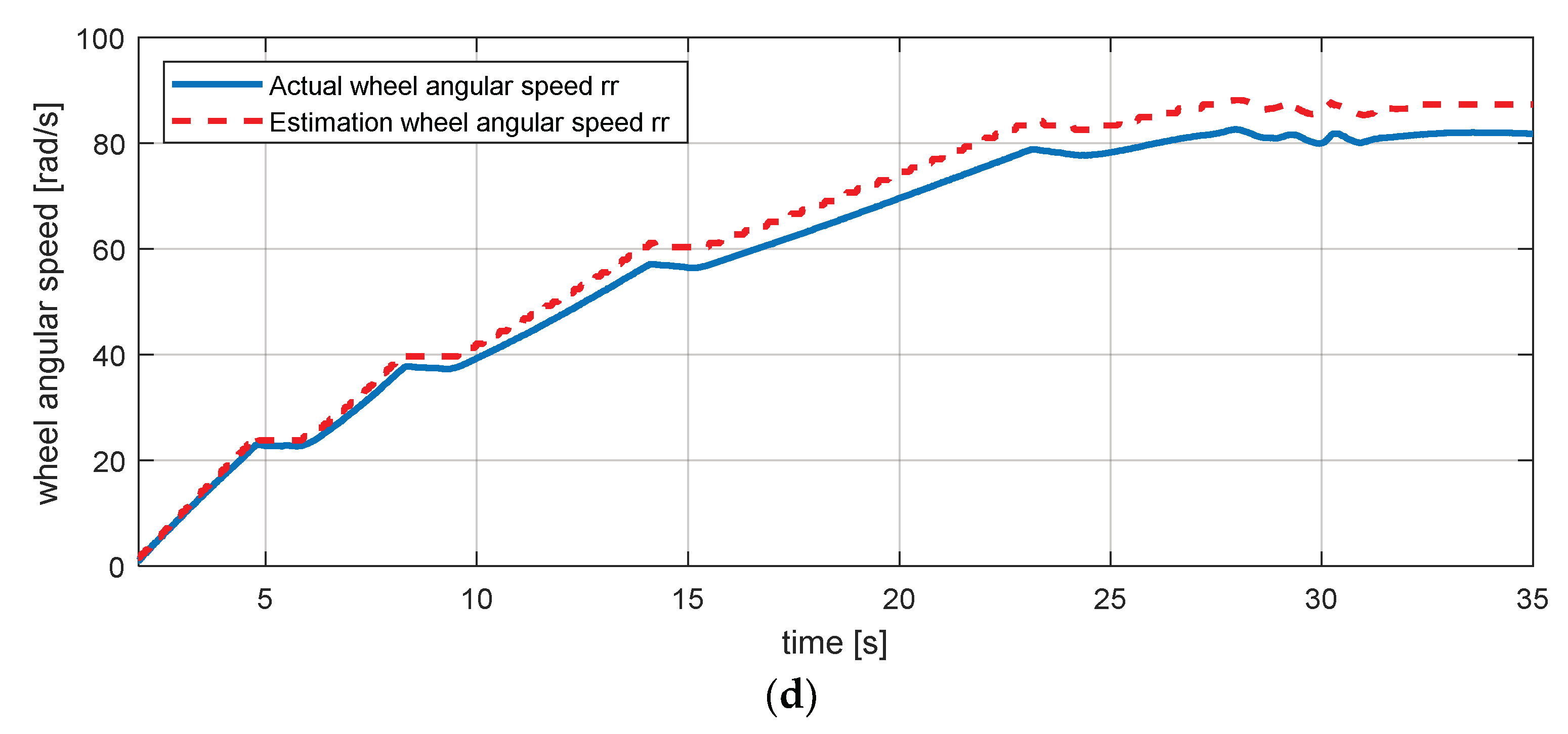
Figure 7.
Estimation simulation result for wheel angular speed. (a) Wheel angular speed—fl (front left); (b) wheel angular speed—fr (front right); (c) wheel angular speed—rl (rear left); (d) wheel angular speed—rr (rear right).
Figure 7.
Estimation simulation result for wheel angular speed. (a) Wheel angular speed—fl (front left); (b) wheel angular speed—fr (front right); (c) wheel angular speed—rl (rear left); (d) wheel angular speed—rr (rear right).
Figure 8.
Estimation simulation result for lateral velocity.
Figure 8.
Estimation simulation result for lateral velocity.
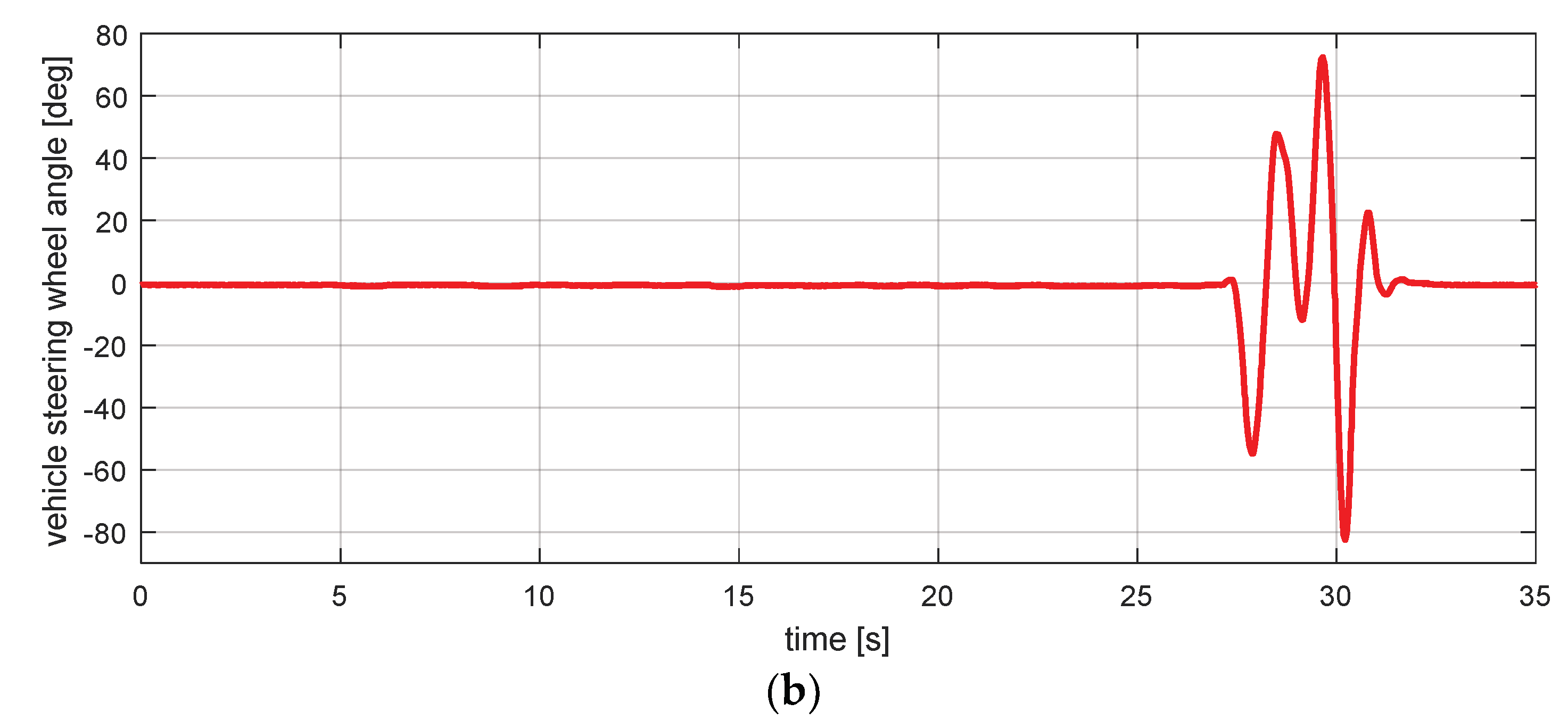
Figure 9.
Estimation simulation scenario 2. (a) Vehicle speed; (b) vehicle steering wheel angle.
Figure 9.
Estimation simulation scenario 2. (a) Vehicle speed; (b) vehicle steering wheel angle.
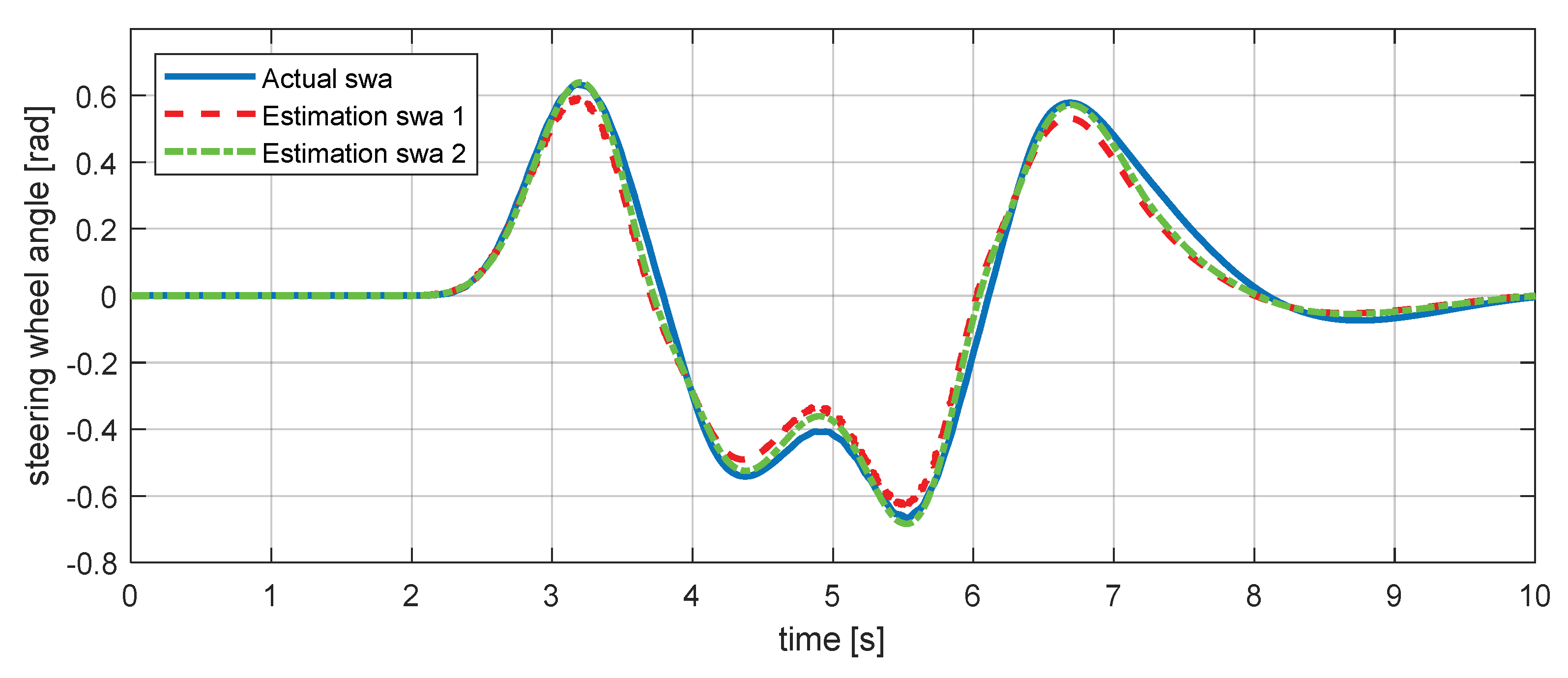
Figure 10.
Estimation simulation result for the steering wheel angle.
Figure 10.
Estimation simulation result for the steering wheel angle.
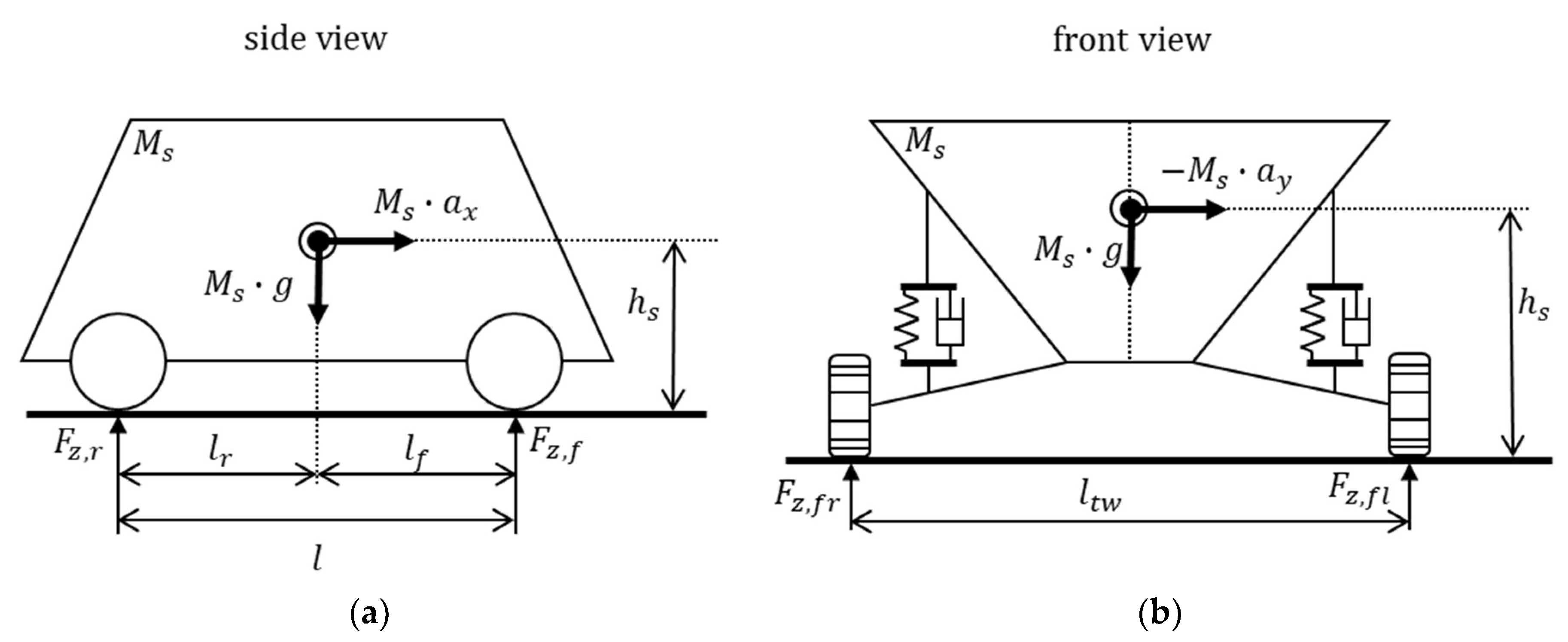
Figure 11.
Vehicle normal force scheme. (a) Vehicle side view; (b) vehicle front view.
Figure 11.
Vehicle normal force scheme. (a) Vehicle side view; (b) vehicle front view.
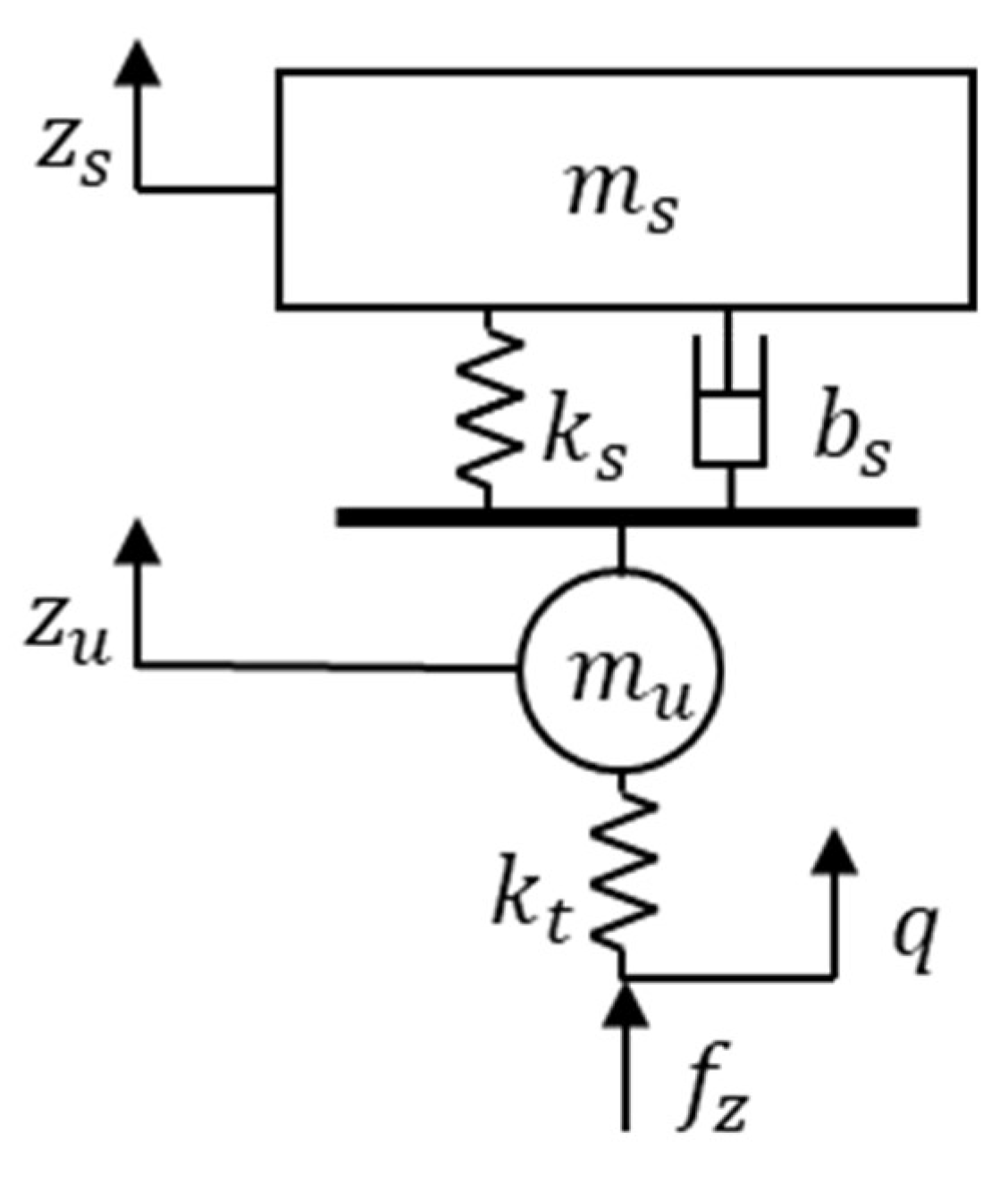
Figure 12.
Quarter car model for normal force calculation.
Figure 12.
Quarter car model for normal force calculation.
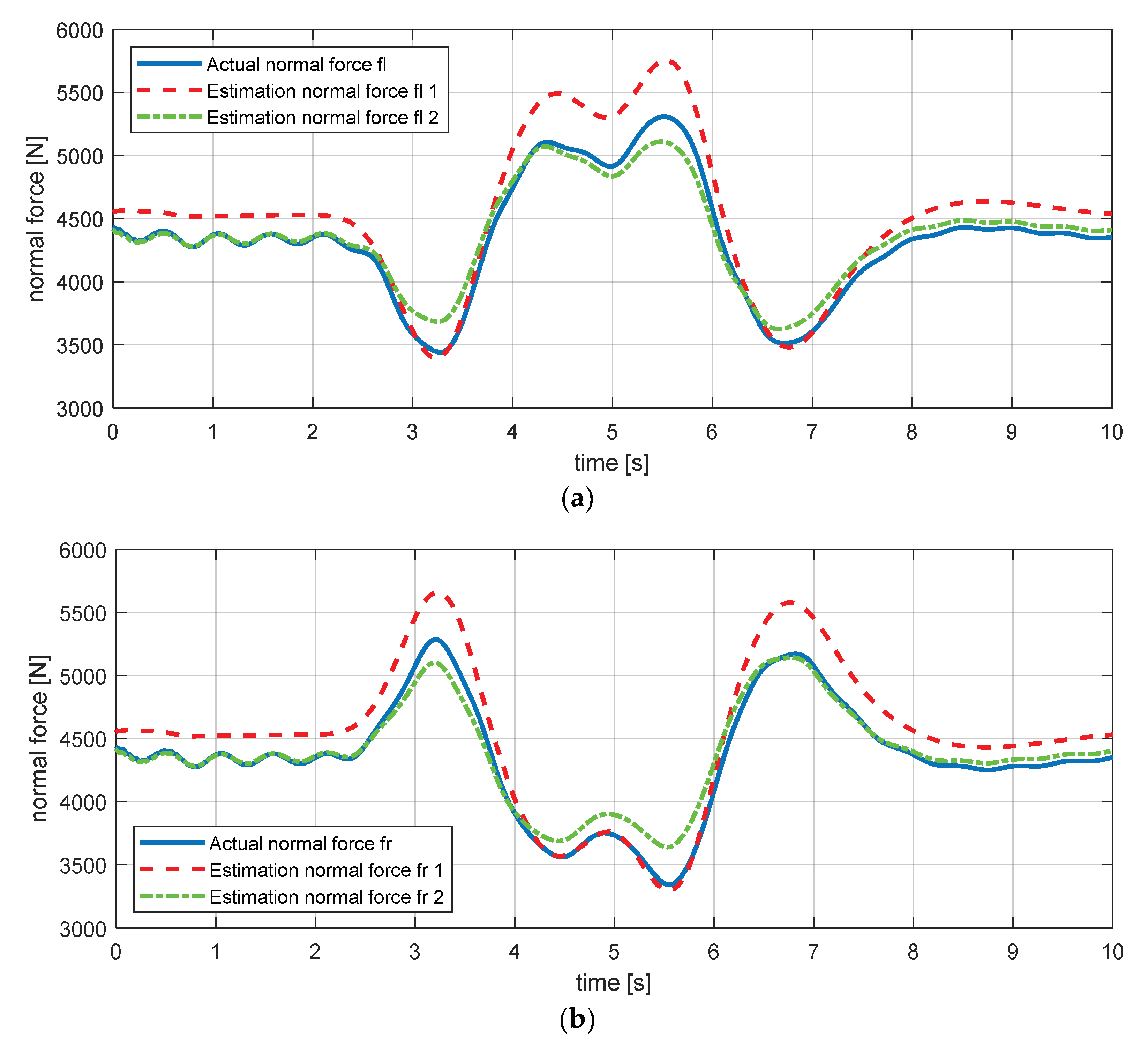
Figure 13.
Estimation simulation result for the normal force. (a) Normal force—fl; (b) normal force—fr; (c) normal force—rl; (d) normal force—rr.
Figure 13.
Estimation simulation result for the normal force. (a) Normal force—fl; (b) normal force—fr; (c) normal force—rl; (d) normal force—rr.
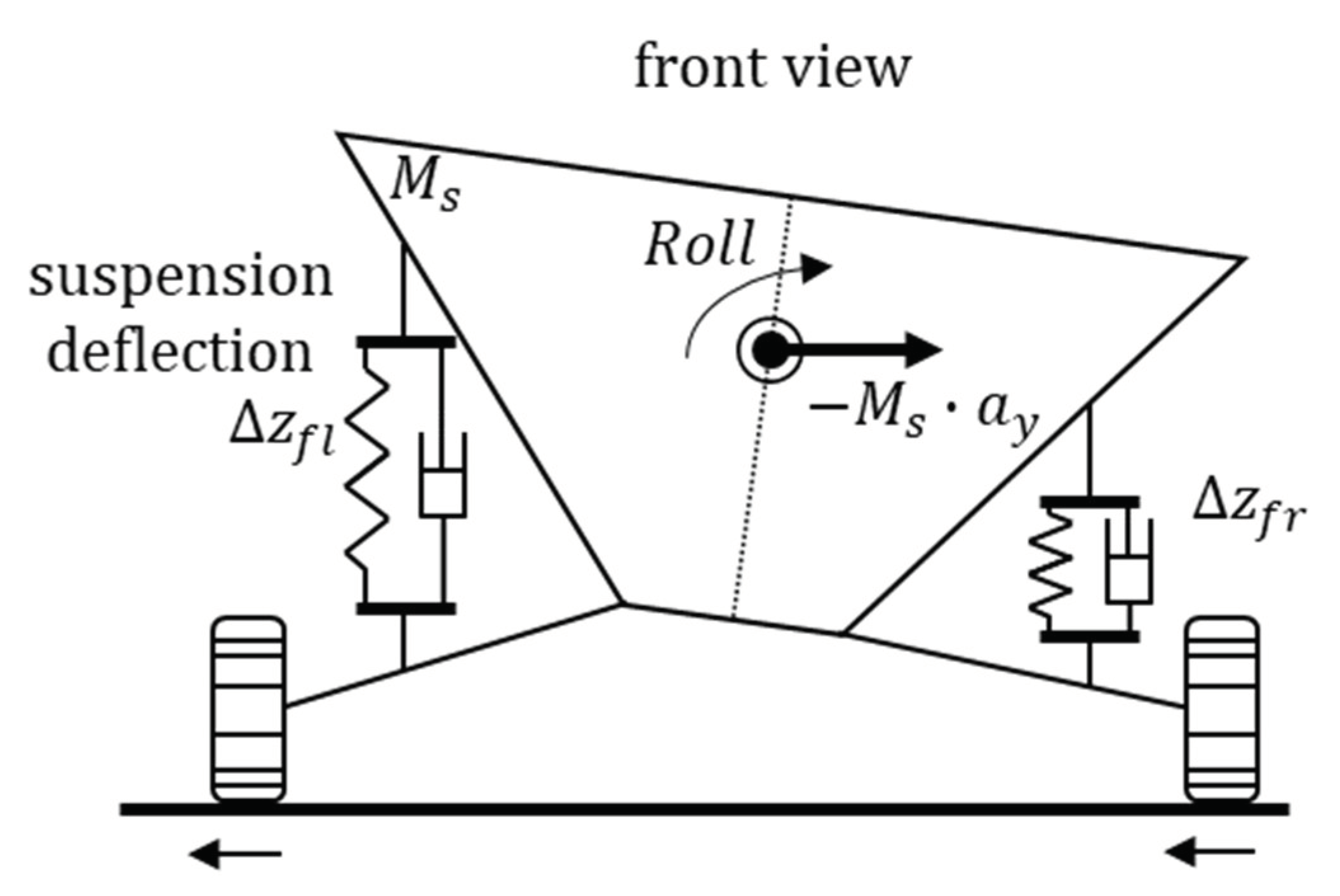
Figure 14.
Vehicle roll angle scheme.
Figure 14.
Vehicle roll angle scheme.
Figure 15.
Estimation simulation result for the roll angle derivative of the roll rate. (a) Roll angle; (b) a derivative of the roll rate.
Figure 15.
Estimation simulation result for the roll angle derivative of the roll rate. (a) Roll angle; (b) a derivative of the roll rate.
Figure 16.
Sensitivity simulation result. (a) The sensitivity of yaw rate (residuals 1–4); (b) sensitivity of lateral acceleration (residuals 1, 2, 7, 8, 9, 10, 11); (c) sensitivity of lateral acceleration (residuals 1, 2, 11); (d) sensitivity of wheel angular speed—fl (residuals 1, 5); (e) sensitivity of body vertical acceleration—fl (residuals 1, 5).
Figure 16.
Sensitivity simulation result. (a) The sensitivity of yaw rate (residuals 1–4); (b) sensitivity of lateral acceleration (residuals 1, 2, 7, 8, 9, 10, 11); (c) sensitivity of lateral acceleration (residuals 1, 2, 11); (d) sensitivity of wheel angular speed—fl (residuals 1, 5); (e) sensitivity of body vertical acceleration—fl (residuals 1, 5).
Figure 17.
FDI (fault detection and isolation) simulation result for yaw rate sensor (normal). (a) Residual 1 and threshold; (b) residual 2 and threshold; (c) residual 3 and threshold; (d) residual 4 and threshold.
Figure 17.
FDI (fault detection and isolation) simulation result for yaw rate sensor (normal). (a) Residual 1 and threshold; (b) residual 2 and threshold; (c) residual 3 and threshold; (d) residual 4 and threshold.
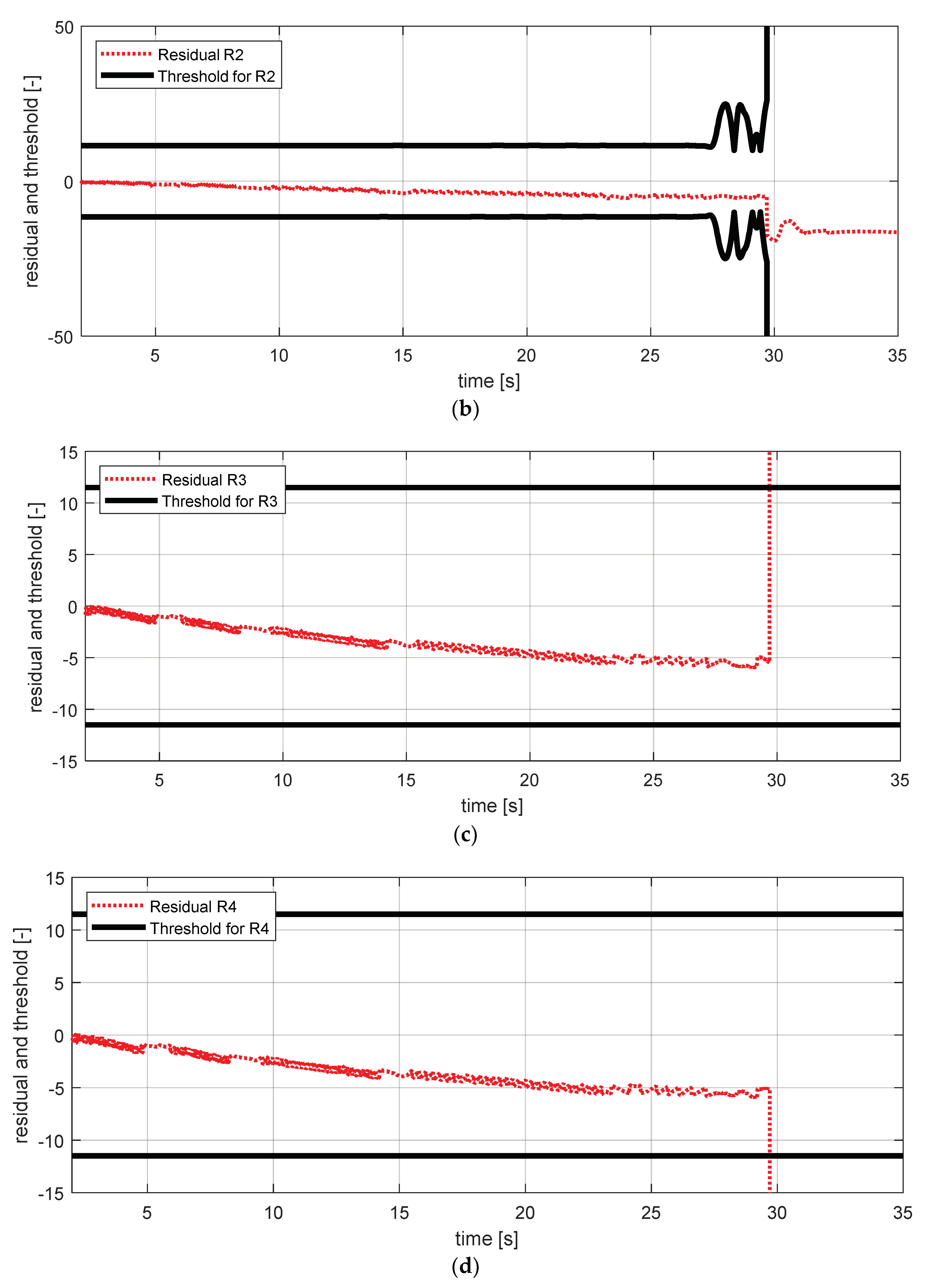
Figure 18.
FDI simulation result for yaw rate sensor fault (fault). (a) Residual 1 and threshold; (b) residual 2 and threshold; (c) residual 3 and threshold; (d) residual 4 and threshold.
Figure 18.
FDI simulation result for yaw rate sensor fault (fault). (a) Residual 1 and threshold; (b) residual 2 and threshold; (c) residual 3 and threshold; (d) residual 4 and threshold.
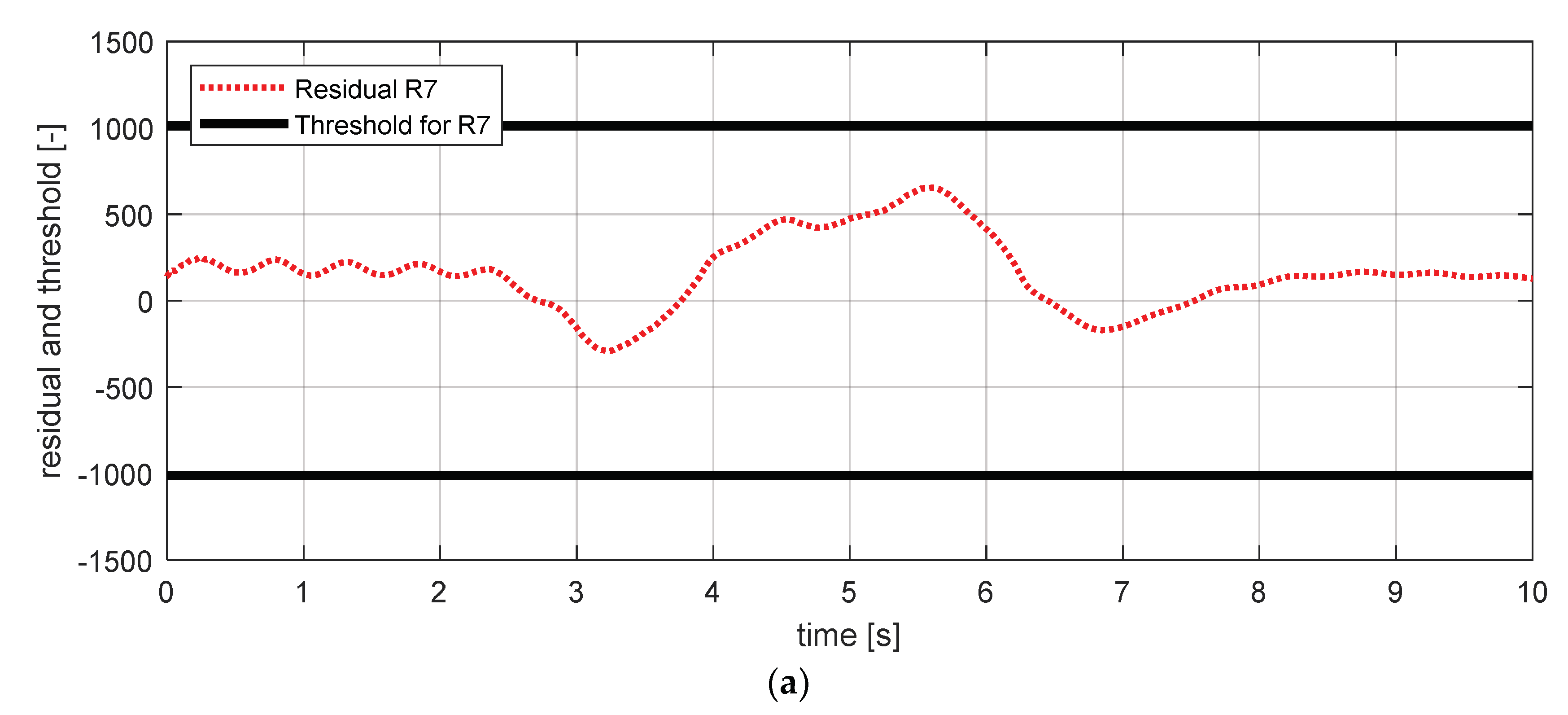
Figure 19.
FDI simulation result for longitudinal acceleration sensor (normal). (a) Residual 7 and threshold; (b) residual 8 and threshold; (c) residual 9 and threshold; (d) residual 10 and threshold.
Figure 19.
FDI simulation result for longitudinal acceleration sensor (normal). (a) Residual 7 and threshold; (b) residual 8 and threshold; (c) residual 9 and threshold; (d) residual 10 and threshold.
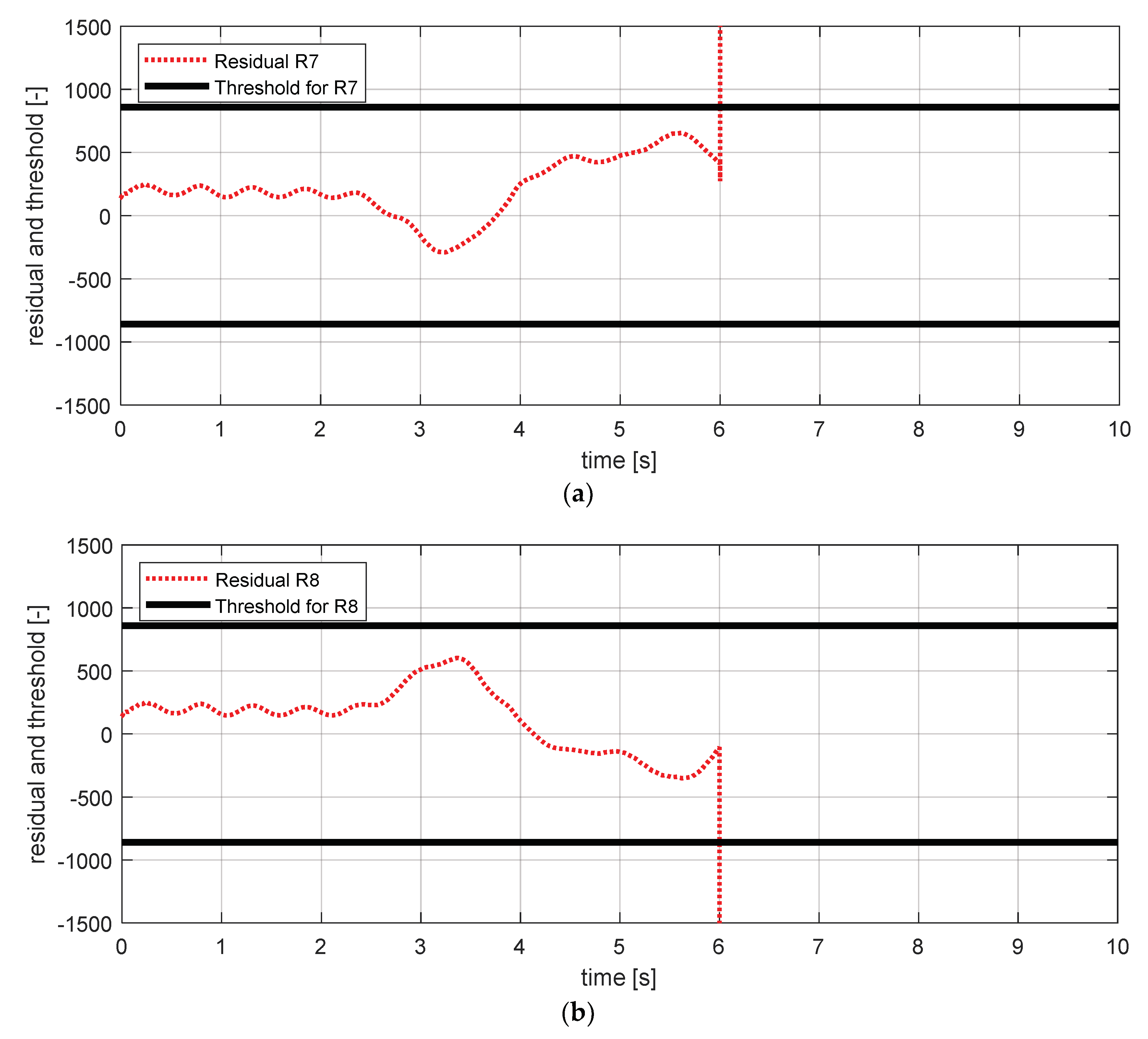
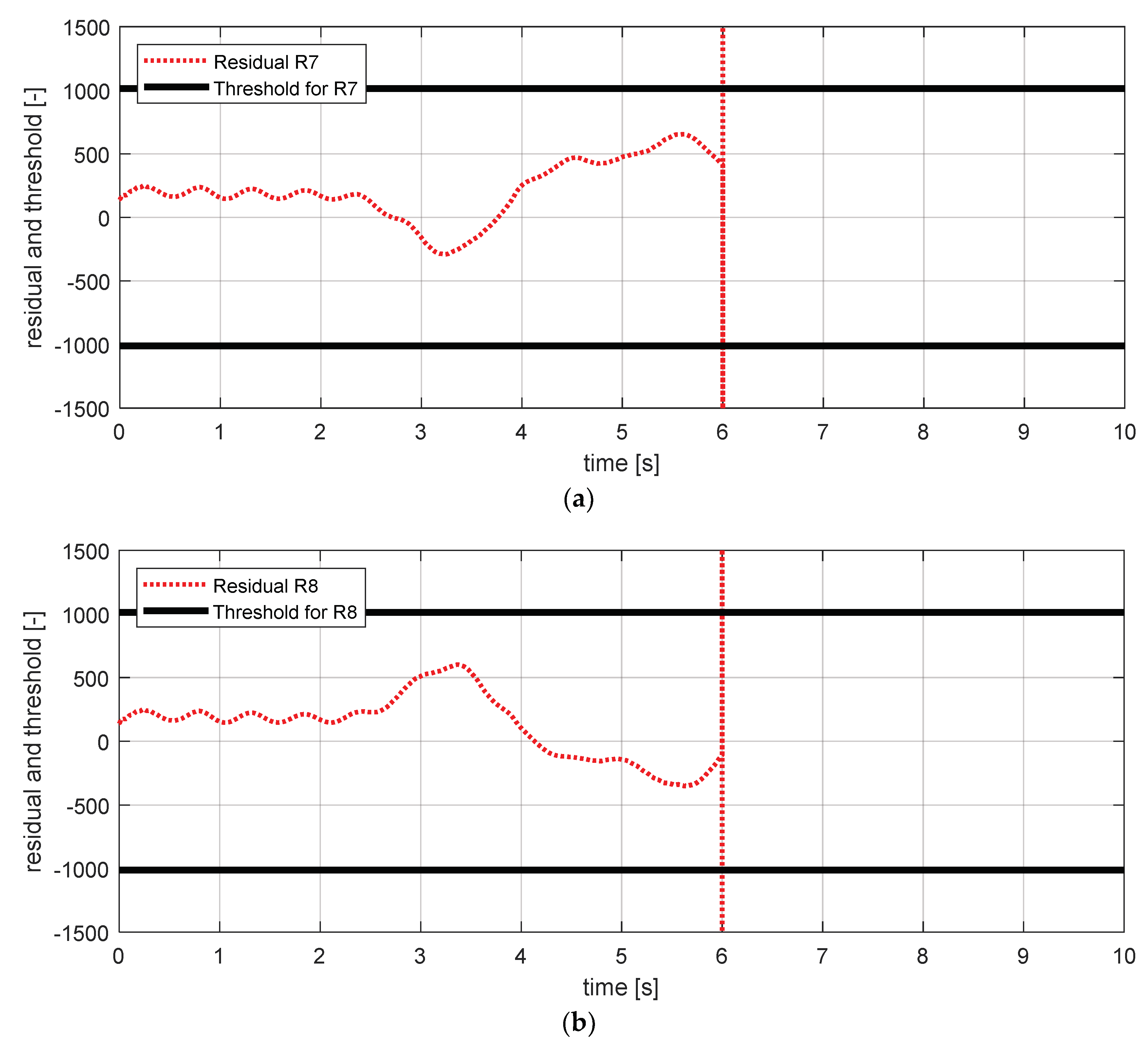
Figure 20.
FDI simulation result for longitudinal acceleration sensor (fault). (a) Residual 7 and threshold; (b) residual 8 and threshold; (c) residual 9 and threshold; (d) residual 10 and threshold.
Figure 20.
FDI simulation result for longitudinal acceleration sensor (fault). (a) Residual 7 and threshold; (b) residual 8 and threshold; (c) residual 9 and threshold; (d) residual 10 and threshold.
Figure 21.
FDI simulation result for lateral acceleration sensor (normal). (a) Residual 7 and threshold; (b) residual 8 and threshold; (c) residual 9 and threshold; (d) residual 10 and threshold; (e) residual 11 and threshold.
Figure 21.
FDI simulation result for lateral acceleration sensor (normal). (a) Residual 7 and threshold; (b) residual 8 and threshold; (c) residual 9 and threshold; (d) residual 10 and threshold; (e) residual 11 and threshold.
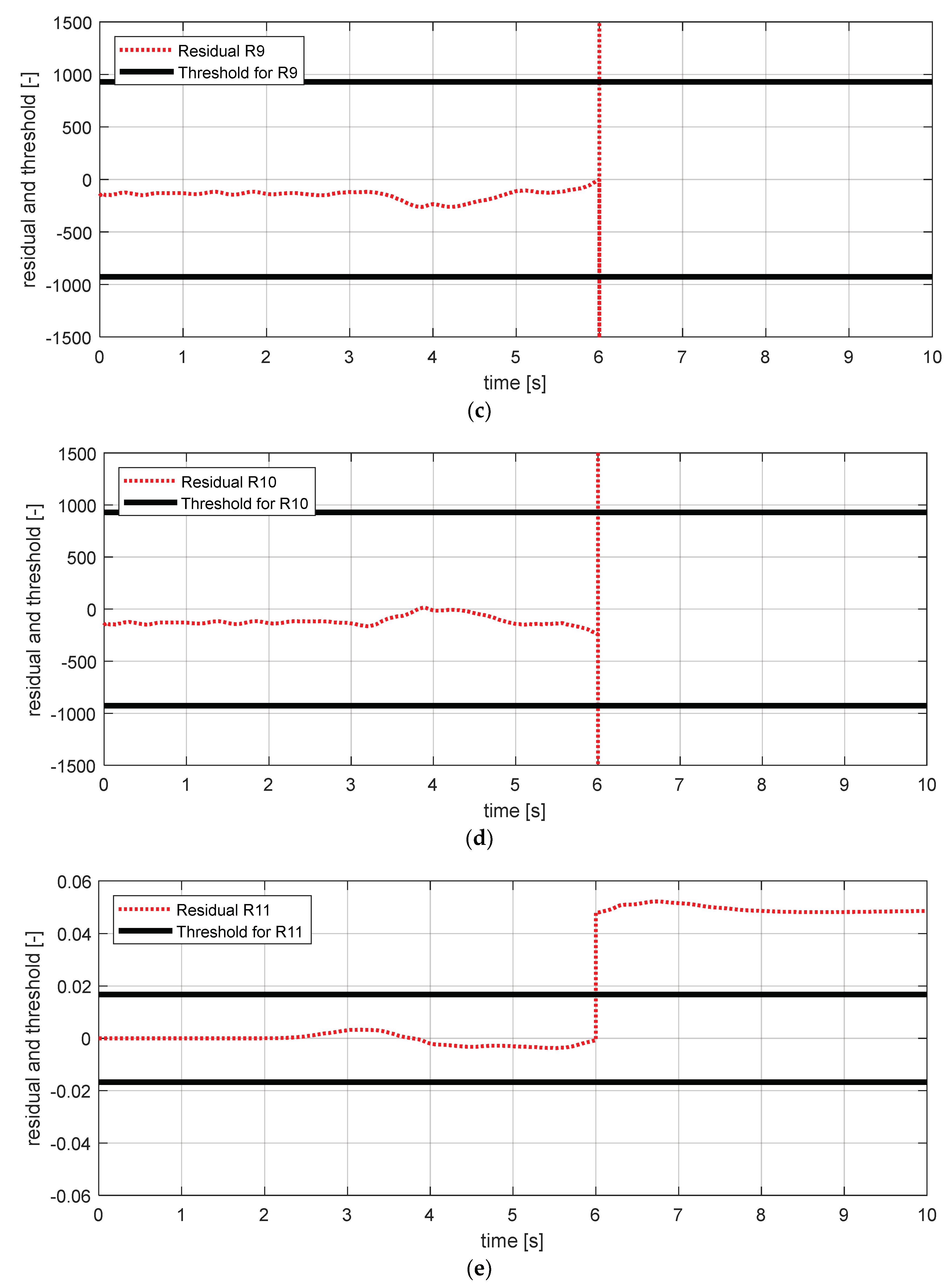
Figure 22.
FDI simulation result for lateral acceleration sensor (fault). (a) Residual 7 and threshold; (b) residual 8 and threshold; (c) residual 9 and threshold; (d) residual 10 and threshold; (e) residual 11 and threshold.
Figure 22.
FDI simulation result for lateral acceleration sensor (fault). (a) Residual 7 and threshold; (b) residual 8 and threshold; (c) residual 9 and threshold; (d) residual 10 and threshold; (e) residual 11 and threshold.
Figure 23.
FDI simulation result for wheel angular speed sensor—fr (normal). (a) Residual 2 and threshold; (b) residual 5 and threshold.
Figure 23.
FDI simulation result for wheel angular speed sensor—fr (normal). (a) Residual 2 and threshold; (b) residual 5 and threshold.
Figure 24.
FDI simulation result for wheel angular speed sensor—fr (fault). (a) Residual 2 and threshold; (b) residual 5 and threshold.
Figure 24.
FDI simulation result for wheel angular speed sensor—fr (fault). (a) Residual 2 and threshold; (b) residual 5 and threshold.
Figure 25.
FDI simulation result for wheel angular speed sensor—rr (normal). (a) Residual 4 and threshold; (b) residual 5 and threshold.
Figure 25.
FDI simulation result for wheel angular speed sensor—rr (normal). (a) Residual 4 and threshold; (b) residual 5 and threshold.
Figure 26.
FDI simulation result for wheel angular speed sensor—rr (fault). (a) Residual 4 and threshold; (b) residual 5 and threshold.
Figure 26.
FDI simulation result for wheel angular speed sensor—rr (fault). (a) Residual 4 and threshold; (b) residual 5 and threshold.
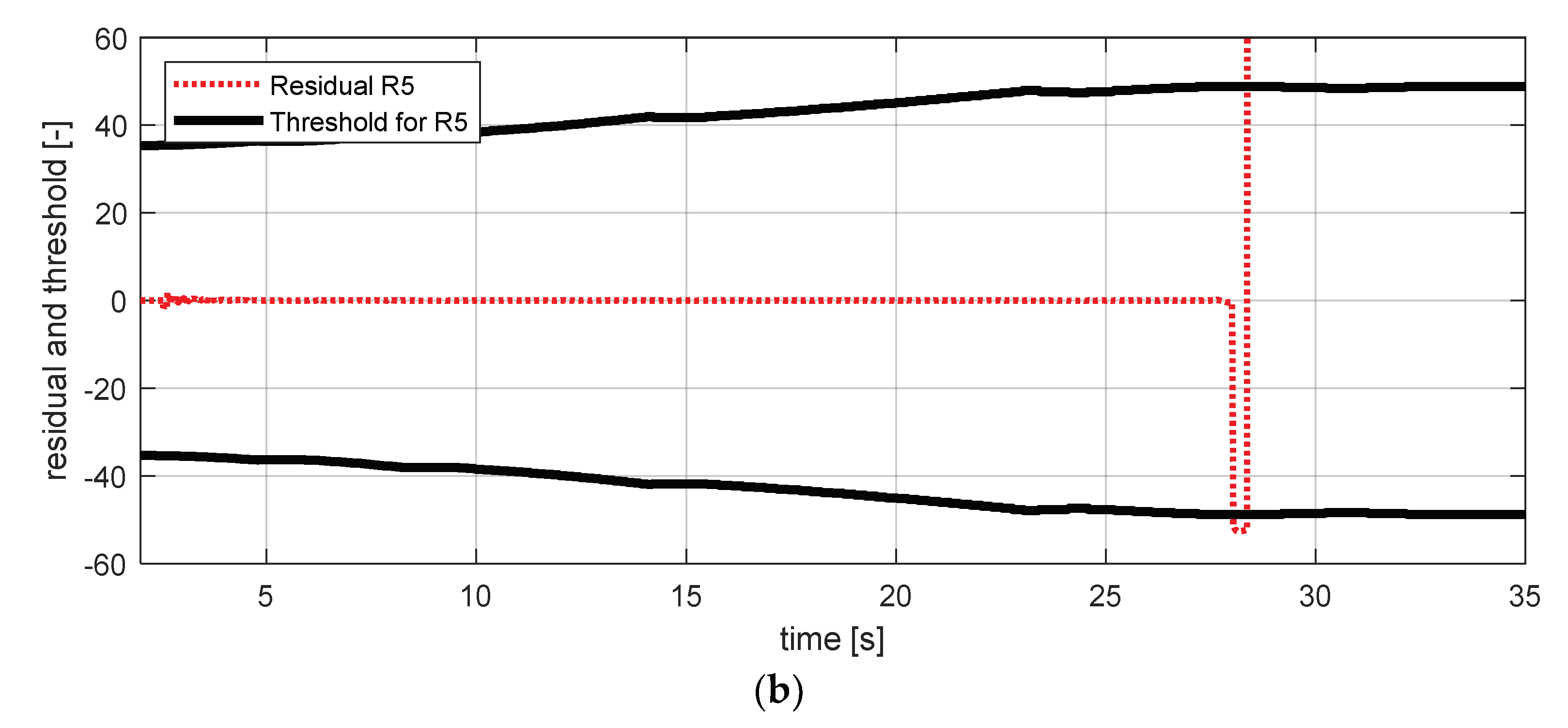
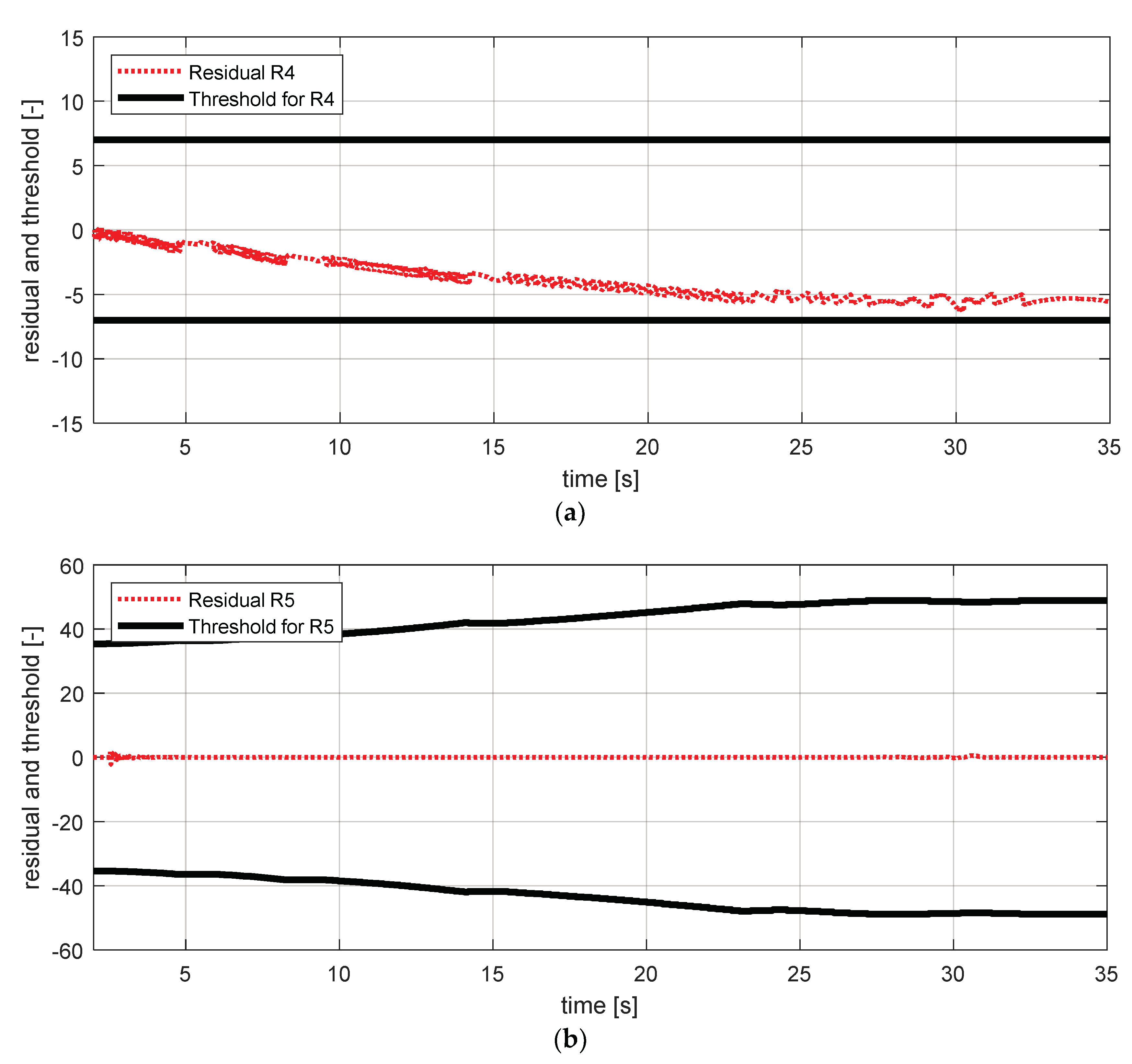
Figure 27.
FDI simulation result for a steering wheel angle sensor (normal). (a) Residual 5 and threshold; (b) residual 6 and threshold.
Figure 27.
FDI simulation result for a steering wheel angle sensor (normal). (a) Residual 5 and threshold; (b) residual 6 and threshold.
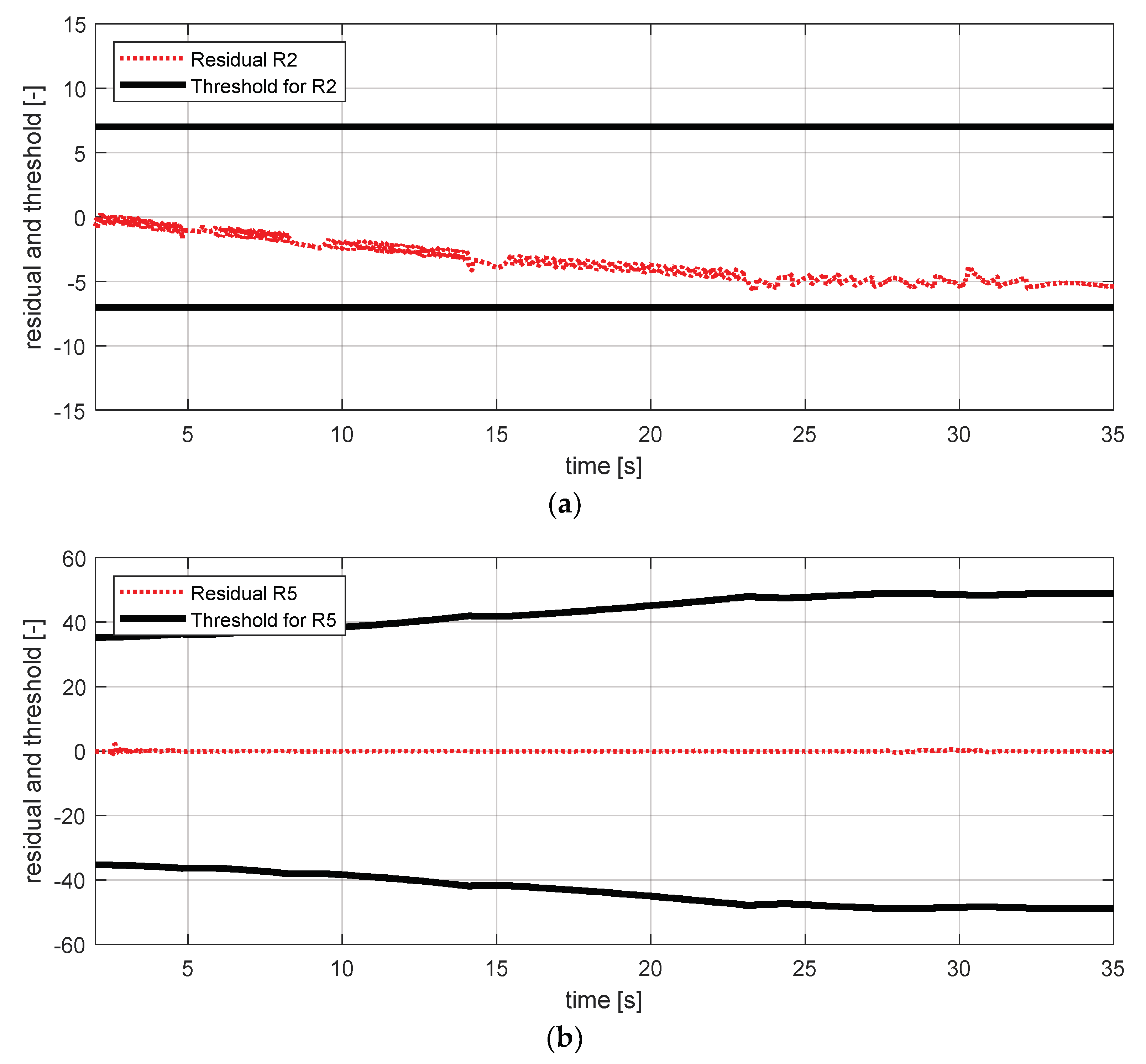
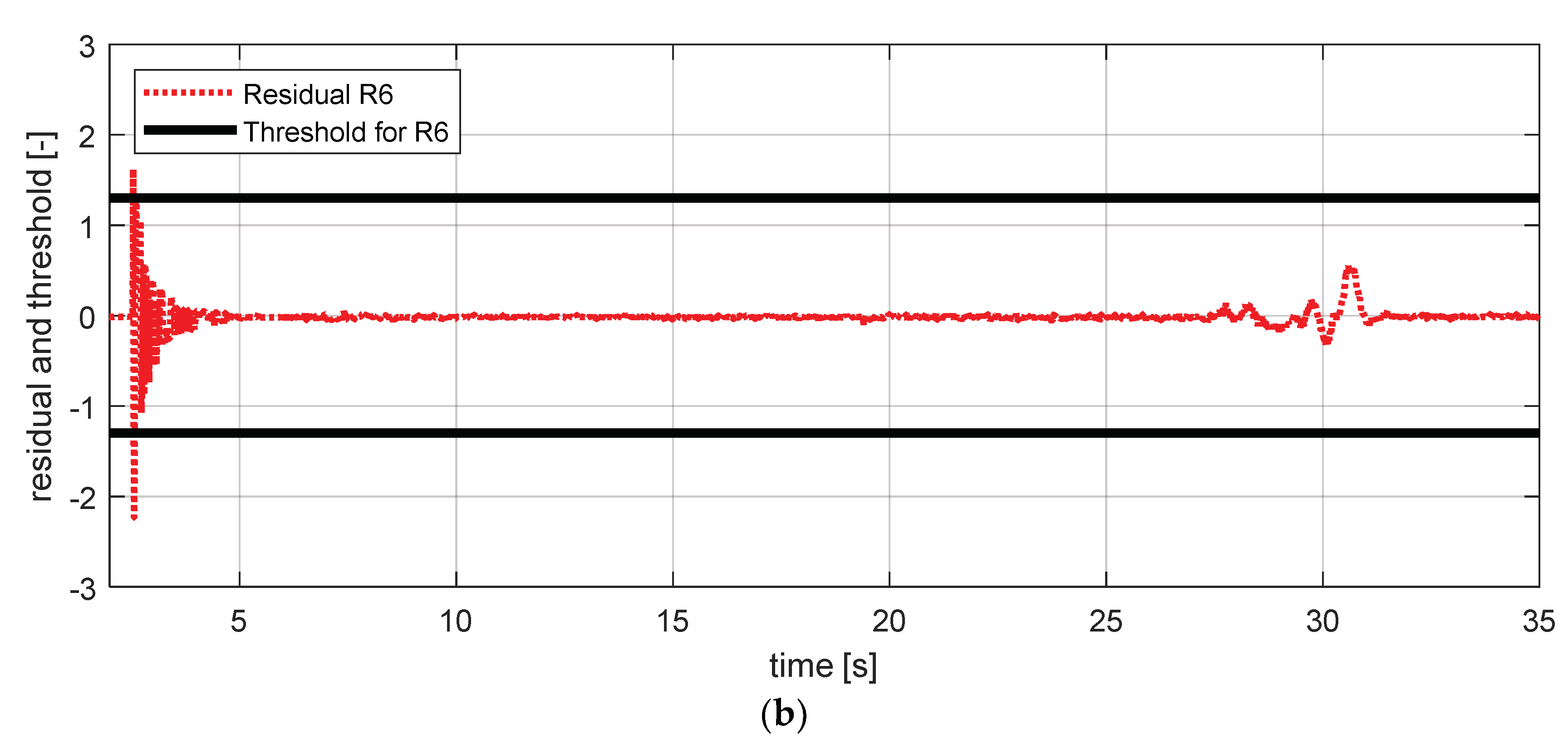
Figure 28.
Simulation result for a steering wheel angle sensor (fault). (a) Residual 5 and threshold; (b) residual 6 and threshold.
Figure 28.
Simulation result for a steering wheel angle sensor (fault). (a) Residual 5 and threshold; (b) residual 6 and threshold.
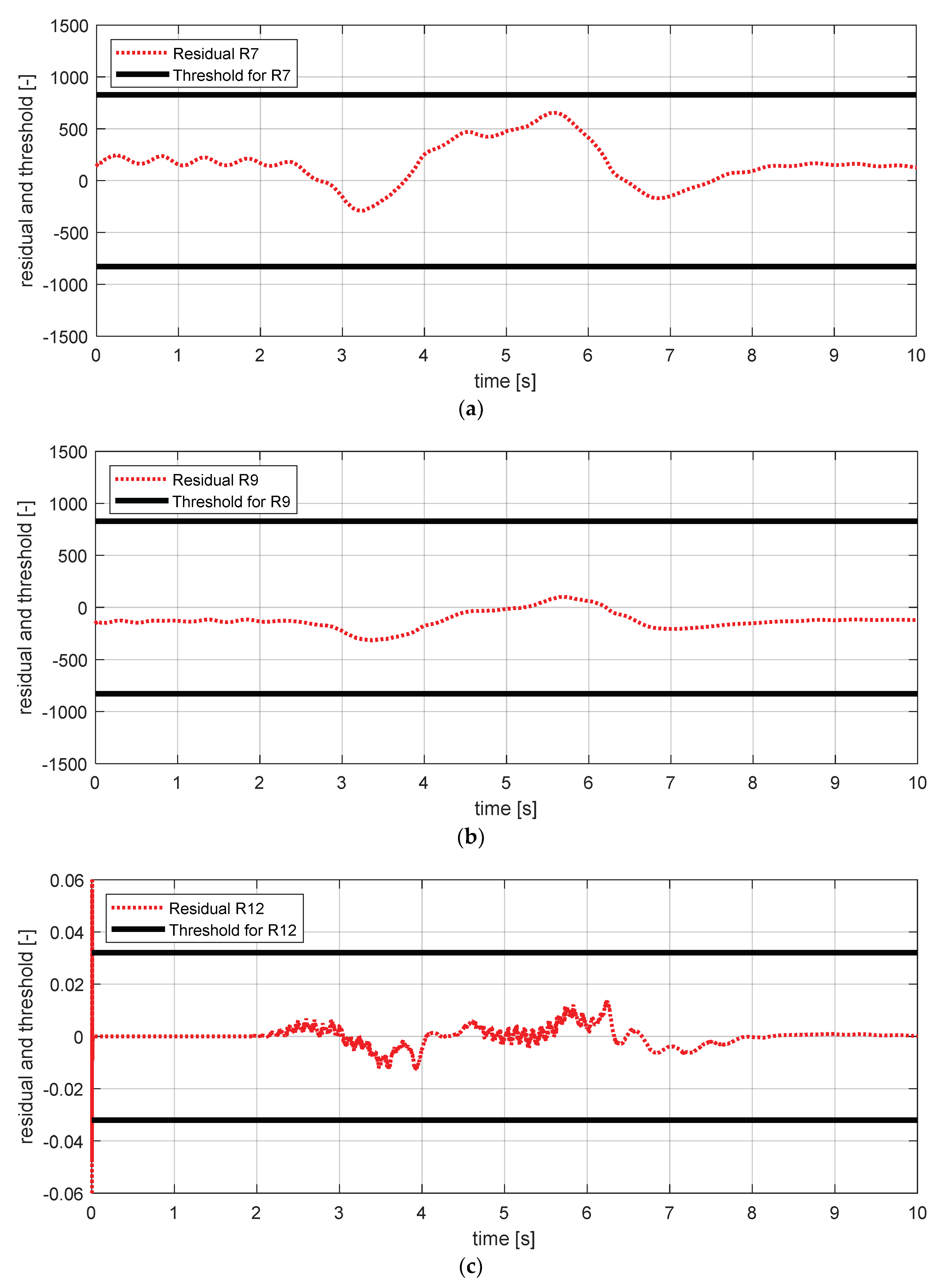
Figure 29.
Simulation result for body vertical acceleration sensor—fl (normal). (a) Residual 7 and threshold; (b) residual 9 and threshold; (c) residual 12 and threshold.
Figure 29.
Simulation result for body vertical acceleration sensor—fl (normal). (a) Residual 7 and threshold; (b) residual 9 and threshold; (c) residual 12 and threshold.
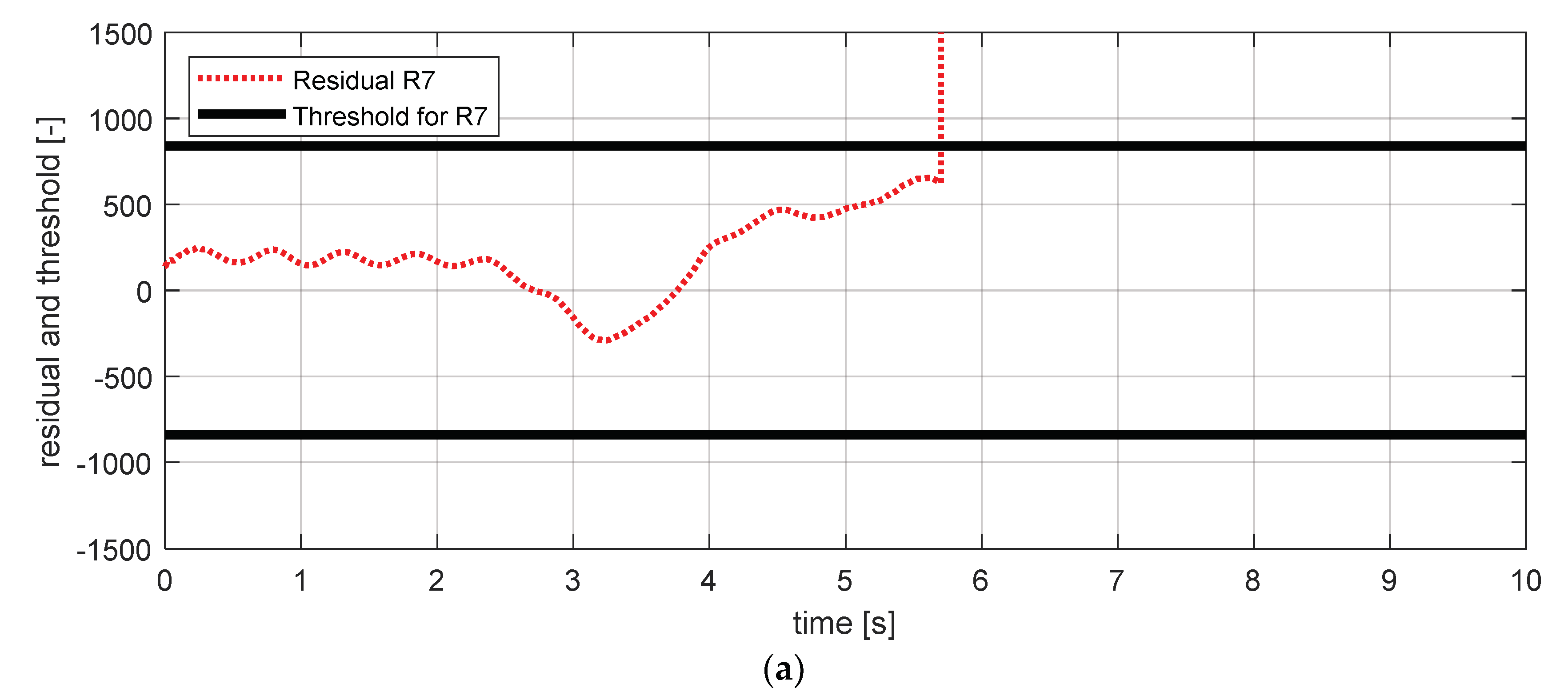
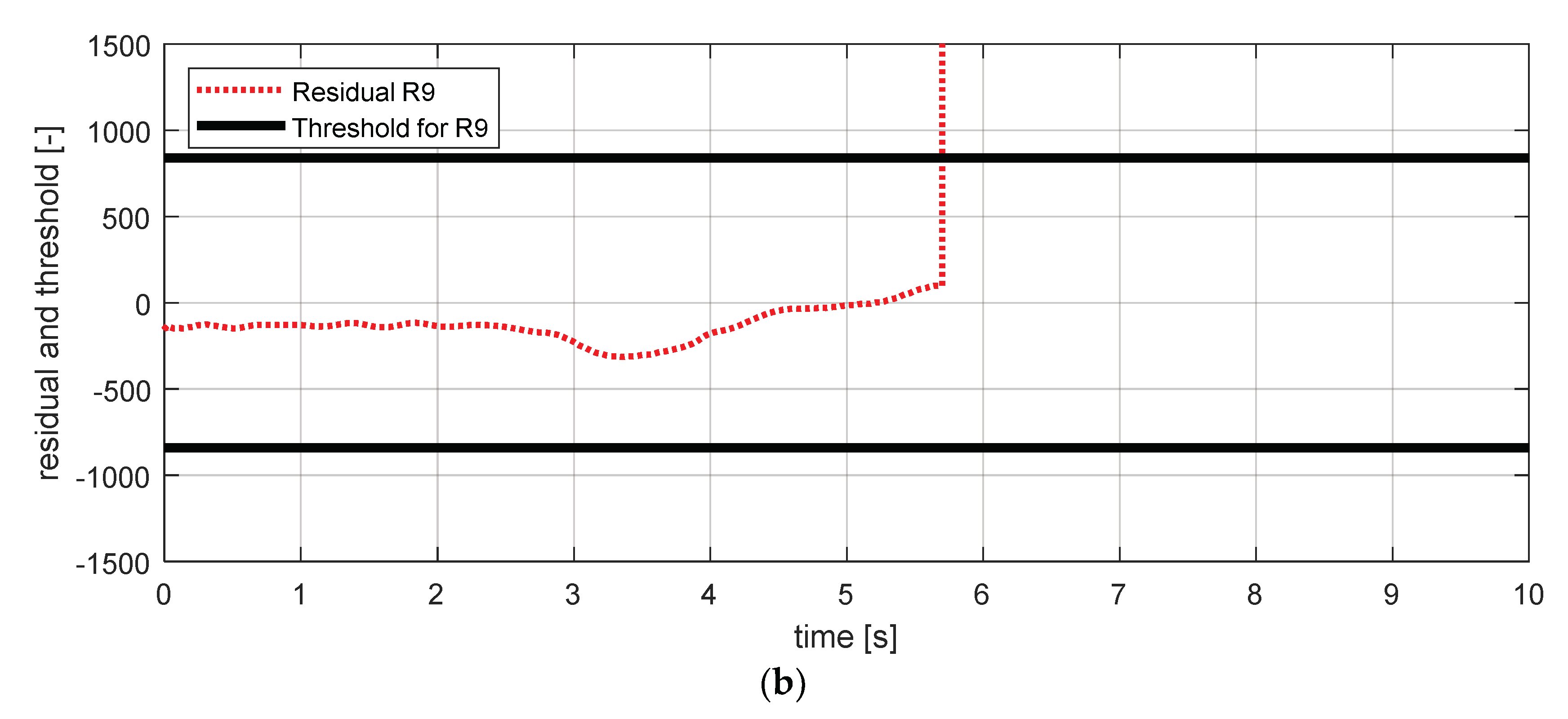
Figure 30.
Simulation result for body vertical acceleration sensor—fl (fault). (a) Residual 7 and threshold; (b) residual 9 and threshold; (c) residual 12 and threshold.
Figure 30.
Simulation result for body vertical acceleration sensor—fl (fault). (a) Residual 7 and threshold; (b) residual 9 and threshold; (c) residual 12 and threshold.
Figure 31.
Simulation result for wheel vertical acceleration sensor—fl (normal). (a) Residual 7 and threshold; (b) residual 9 and threshold.
Figure 31.
Simulation result for wheel vertical acceleration sensor—fl (normal). (a) Residual 7 and threshold; (b) residual 9 and threshold.
Figure 32.
Simulation result for wheel vertical acceleration sensor—fl (fault). (a) Residual 7 and threshold; (b) residual 9 and threshold.
Figure 32.
Simulation result for wheel vertical acceleration sensor—fl (fault). (a) Residual 7 and threshold; (b) residual 9 and threshold.
Table 1.
Parameters semi-correlation table of wheel angular speed residuals.
Table 1.
Parameters semi-correlation table of wheel angular speed residuals.
| | | | | | | |
|---|
| X | X | X | | | |
| X | X | | X | | |
| X | | | | X | |
| X | | | | | X |
Table 2.
Parameters semi-correlation table of steering wheel angle residuals.
Table 2.
Parameters semi-correlation table of steering wheel angle residuals.
| | | | | | |
|---|
| X | X | | | X |
| | | X | X | X |
Table 3.
Parameters semi-correlation table of normal force residuals.
Table 3.
Parameters semi-correlation table of normal force residuals.
| | | | | | | | |
|---|
| X | X | X | | | X | |
| X | X | | X | | | X |
| X | X | X | X | X | X | |
| X | X | | | X | | X |
Table 4.
Parameters semi-correlation table of roll residuals.
Table 4.
Parameters semi-correlation table of roll residuals.
| | | | |
|---|
| X | - | - |
| - | X | X |
Table 5.
Parameters semi-correlation table of all residuals.
Table 5.
Parameters semi-correlation table of all residuals.
| | | | | | | | | | | | | | |
|---|
| X | | X | X | | | | | | | | | |
| X | | X | | X | | | | | | | | |
| X | | | | | X | | | | | | | |
| X | | | | | | X | | | | | | |
| | | | X | X | | | X | | | | | |
| | | | | | X | X | X | | | | | |
| | X | X | | | | | | X | | | X | |
| | X | X | | | | | | | X | | | X |
| | X | X | | | | | | X | X | X | X | |
| | X | X | | | | | | | | X | | X |
| | | X | | | | | | - | - | | | |
| | | - | | | | | | X | X | | | |
Table 6.
The sensitivity of residuals with a fault signal.
Table 6.
The sensitivity of residuals with a fault signal.
| Fault Signal | Sensitivity (Partial Derivative) |
|---|
| |
|
|
|
| |
|
|
|
| |
|
|
|
|
|
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
|
| |
|
|
| |
|
| |
| | |
| |
|
Table 7.
Fault detection and isolation table.
Table 7.
Fault detection and isolation table.
| | | | | | | | | | | | | | |
|---|
| - | | - | X | | | | | | | | | |
| - | | - | | X | | | | | | | | |
| X | | | | | X | | | | | | | |
| X | | | | | | X | | | | | | |
| | | | X | X | | | X | | | | | |
| | | | | | X | X | X | | | | | |
| | X | X | | | | | | X | | | X | |
| | X | X | | | | | | | X | | | X |
| | X | X | | | | | | X | X | X | X | |
| | X | X | | | | | | | | X | | X |
| | | X | | | | | | - | - | | | |
| | | - | | | | | | X | X | | | |



















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}