1. Introduction
Forest fires spread rapidly according to topography and mountain slope if they cannot evolve at an early stage due to their nature. In particular, forest fires generated during the day spread more widely, cannot evolve, and are transferred to deeper mountain areas.
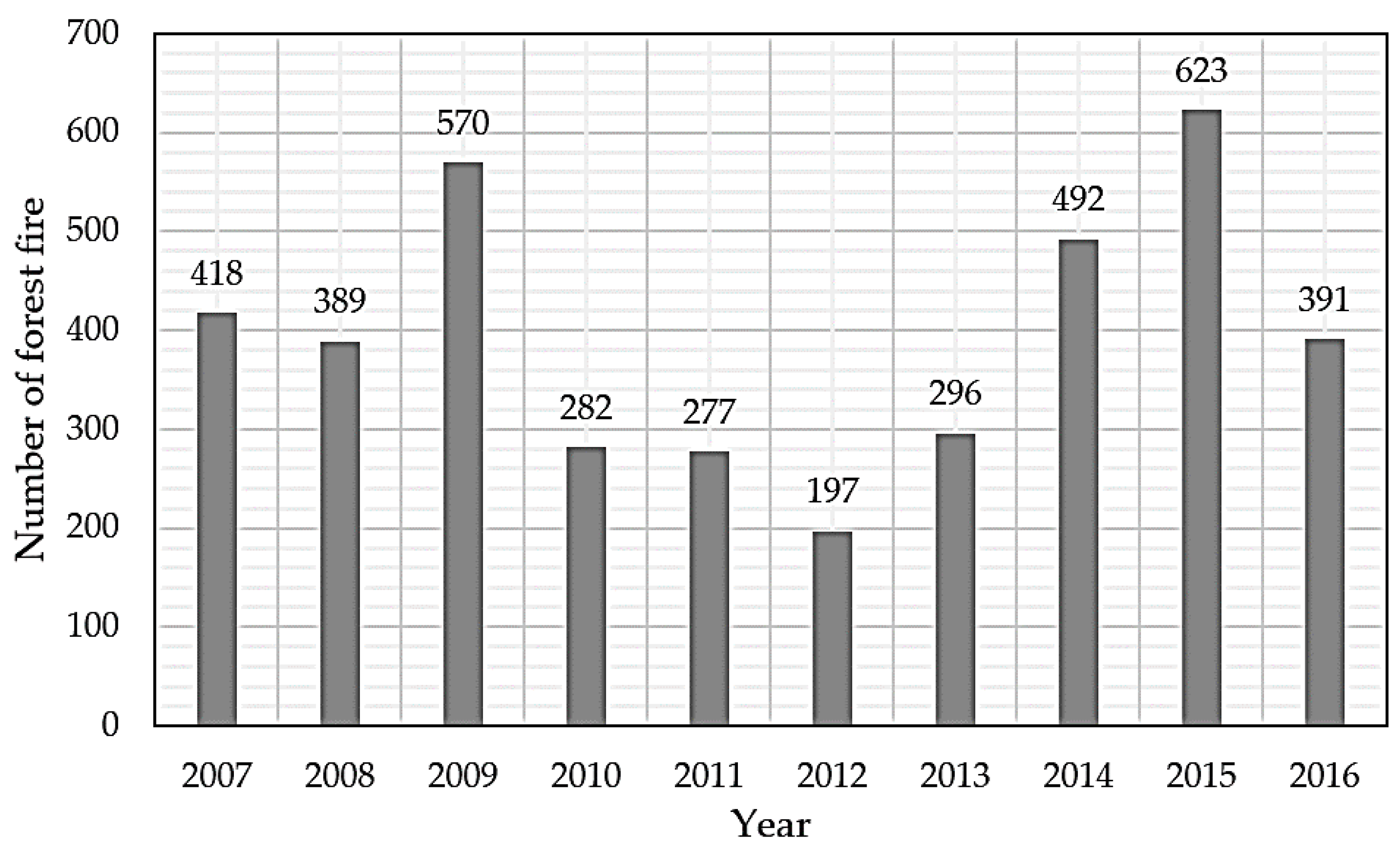
Figure 1 shows forest fire occurrence in South Korea. An average of 340,000 people die every year due to forest fires worldwide [
1], and average yearly damage caused by forest fires over the last 10 years was approximately 10 million US Dollars [
2]. Destroyed forests, damaged buildings, and human injuries and casualties due to forest fires should all be avoided. Forest fire watching, administered separately by local governments in South Korea, has a human cost of approximately 0.5 million US Dollar for each local government [
1]. The goal of this paper was to reduce this damage, recovery, and maintenance costs without increasing forest fire risk.
The average forest area in South Korea is about 6 million hectares [
2]. When the proposed protocol is applied to a sensor capable of covering a 300 m range, the number of required sensors is about 1000. It does not cover all areas of the forest but is the central area and the passenger path where forest fires can intensify. The areas that are actually in contact with the surface and the summits are very unlikely to develop into forest fires, and the fire is naturally turned off. When the price of one sensor is set at 200 US Dollar, it costs about 2.2 million US Dollar for maintenance costs, such as sensor cost and battery replacement. The cost of the sensor using the protocol proposed in this paper is about 1/4 times lower than the existing cost, and the 24 h surveillance is cost effective. There is an advantage in that it is possible. The biggest advantage of being able to keep watch 24 h is that you can completely prevent forest fires. In addition, even if the existing labor cost is replaced with a sensor, the maintenance cost of the battery also exists. When sensors are used, energy-efficiency is the most considered part.
Synchronous and asynchronous medium access control (MAC) protocols have been proposed to reduce energy consumption, e.g., such as idle energy [
3,
4], which operates on the basis of a duty-cycle. Traffic increases as the number of connected devices increases, but node duty-cycles remain unchanged. Consequently, opportunities to send data decrease and throughput decreases, as listening interval durations increase. In particular, a forest fire’s sudden and natural escalation means there is small traffic by the initial sensors that very rapidly increases as the fire develops.
Therefore, an adaptive duty-cycled hybrid X-MAC (ADX-MAC) protocol based on X-MAC protocol [
5] is proposed to implement an energy efficient forest fire prediction system that more efficiently reduces energy consumption during sensor waiting times and speeds up data transmission between nodes.
2. Forest Fire Prediction
The forest fire prediction model [
6] is selected by data used, including nationwide forest fire data for 25 years (1991–2015), consisting of 10,560 observations and other details regarding forest fire areas and characteristics.
Table 1 summarizes the variables included in the forest fire damage records [
1,
6,
7].
2.1. Prediction Model Weights
The prediction model used the weather and location information relevant to the forest fire occurrence and parameters for human accessibility. It employed spatial kriging to include meteorological information, distance from dense populations to the fire location, number of trails in the lattice, and altitude data to generate accessibility parameters. The available data was modified to correspond to a 5 km grid. The experiment selected logistic regression as the forest fire prediction model and it was reflected in the monthly effect model using variable numbers for refinement. The model achieved 84.8% predicted rate, which was very significant.
Main forest fire contributing factors include temperature, wind speed, humidity, and rainfall.
Table 2 shows the correlations for these climate factors according to the forest fire prediction model.
The correlation between the number of forest fires and temperature (TP) is almost insignificant, whereas wind speed (), humidity (), and rainfall () correlations are all significant at this level. Thus, forest fire probability increases when wind speed is high, humidity is low, and rainfall is small.
Forest fire risk in terms of weighted climate factors can be estimated as:
where
where
is the measured climate factor over time frame
t with
and
maximum and minimum, respectively, over the period; and
is the correlation coefficient from
Table 1, i.e., the weight for each factor. Therefore, each
is a weighted ratio to the uniform average change of all factors.
2.2. Forest Fire Risk Analysis from Test Statistics and Weights
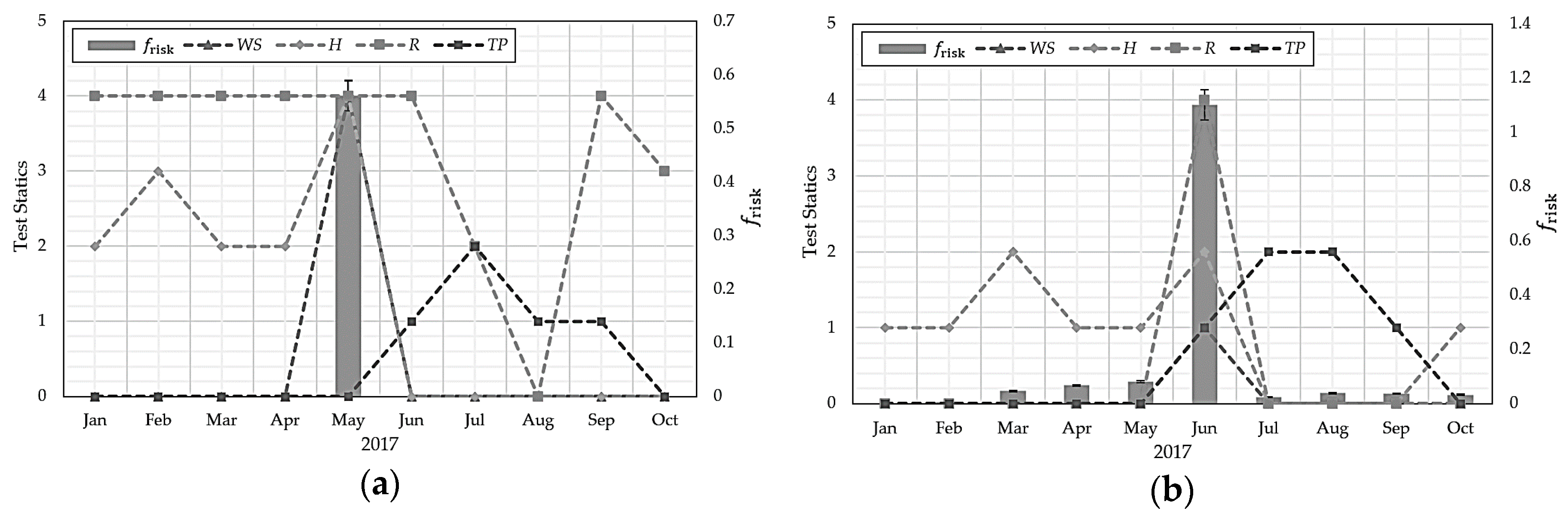
Table 3 and
Table 4 show climate factors for Gangneung and Surak Mountains in South Korea for January to October 2017 [
2,
7]. Stair function test statistics included 0–5, considering the minimum and maximum for each climate factor in the mountain range.
Figure 2 shows the data from
Table 3 and
Table 4 graphically.
The stair function is to compute each climatic factor as a single graph regardless of the unit dimension, and it is divided into stages according to the numerical value of each climatic factor. is more than 5 to 11 m/s, is 60 to 30%, is 400 to 100 mm, and TP is 20 to 35 °C. The figures set for each step show the average degree of climate change in the forest area of South Korea.
The Mt. Gangneung forest fire, 8 May 2017, had
= 0.5610, i.e., very high compared to normal values, and the Mt. Surak forest fire, 1 June 2017, had
= 1.102, i.e., extremely high. Thus, model estimates are reasonable, and hence
was adopted as a core parameter for the proposed protocol. However,
does not specify that a forest fire will occur, but only that the probability of occurrence is high.
Figure 2 shows that
is most influenced by
among the climate factors, but there are some factors considered by other climate factors.
3. Energy Efficient Forest Fire Prediction Protocol
3.1. Duty-cycle Wireless Sensor Networks
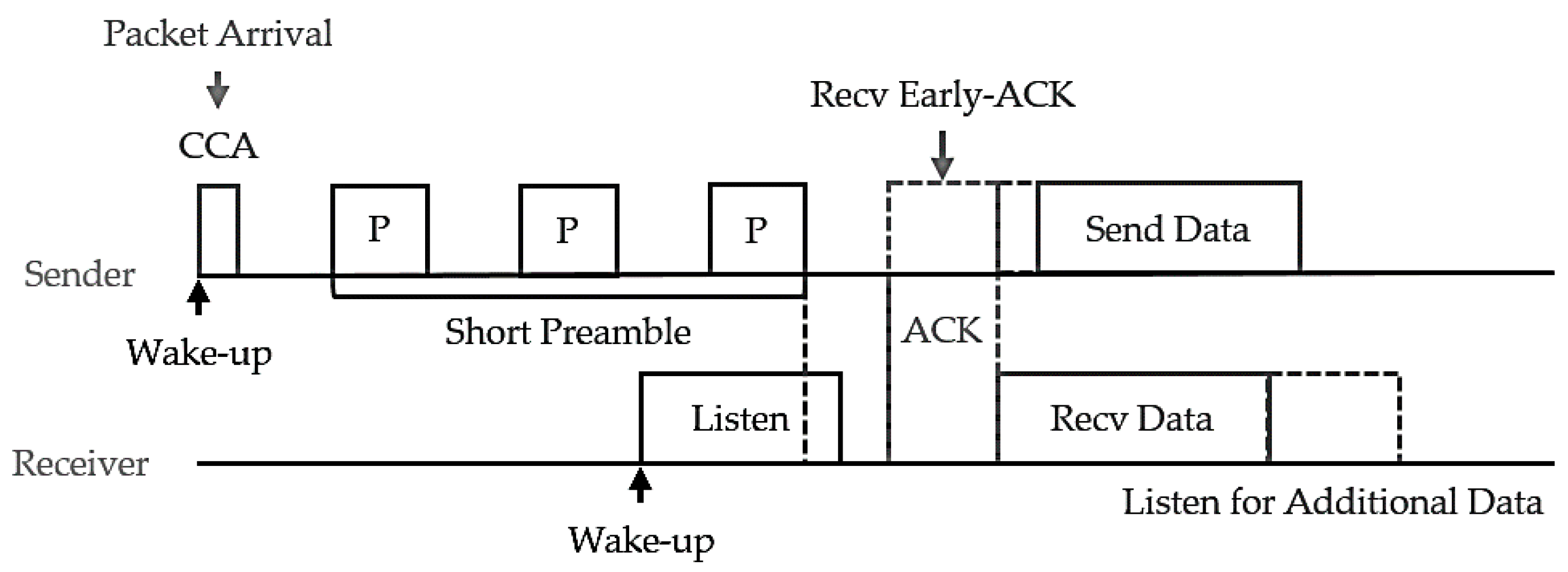
Figure 3 shows the asynchronous sensor network protocol, i.e., the X-MAC protocol [
4], that was proposed to solve the Berkley MAC (B-MAC) low power listening preamble overhearing problem [
8]. X-MAC uses the basic B-MAC methods, but in contrast to the long B-MAC preamble, it transmits the node address as a short preamble followed by a listening to ensure they will receive it.
A receiver node receives the preamble containing its own address value and sends an Early-ACK to a sender node to inform it of preamble reception. When the sender node receives the Early-ACK, it stops transmitting the preamble and immediately transmits the data, thereby transferring data between the two nodes. If the receiver node does not detect its address in the preamble, it immediately returns to idle mode. Thus, control packet overhead is significantly reduced compared to B-MAC, and returning to idle mode effectively reduces overhearing.
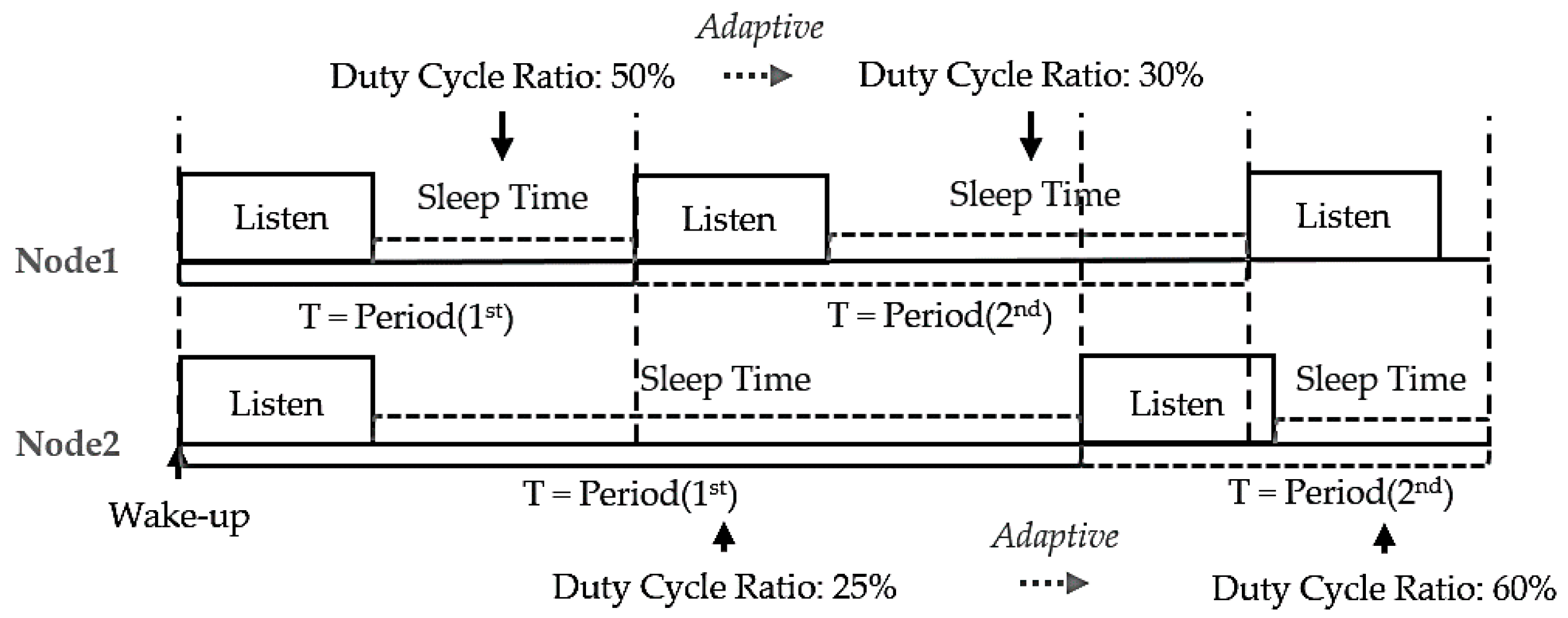
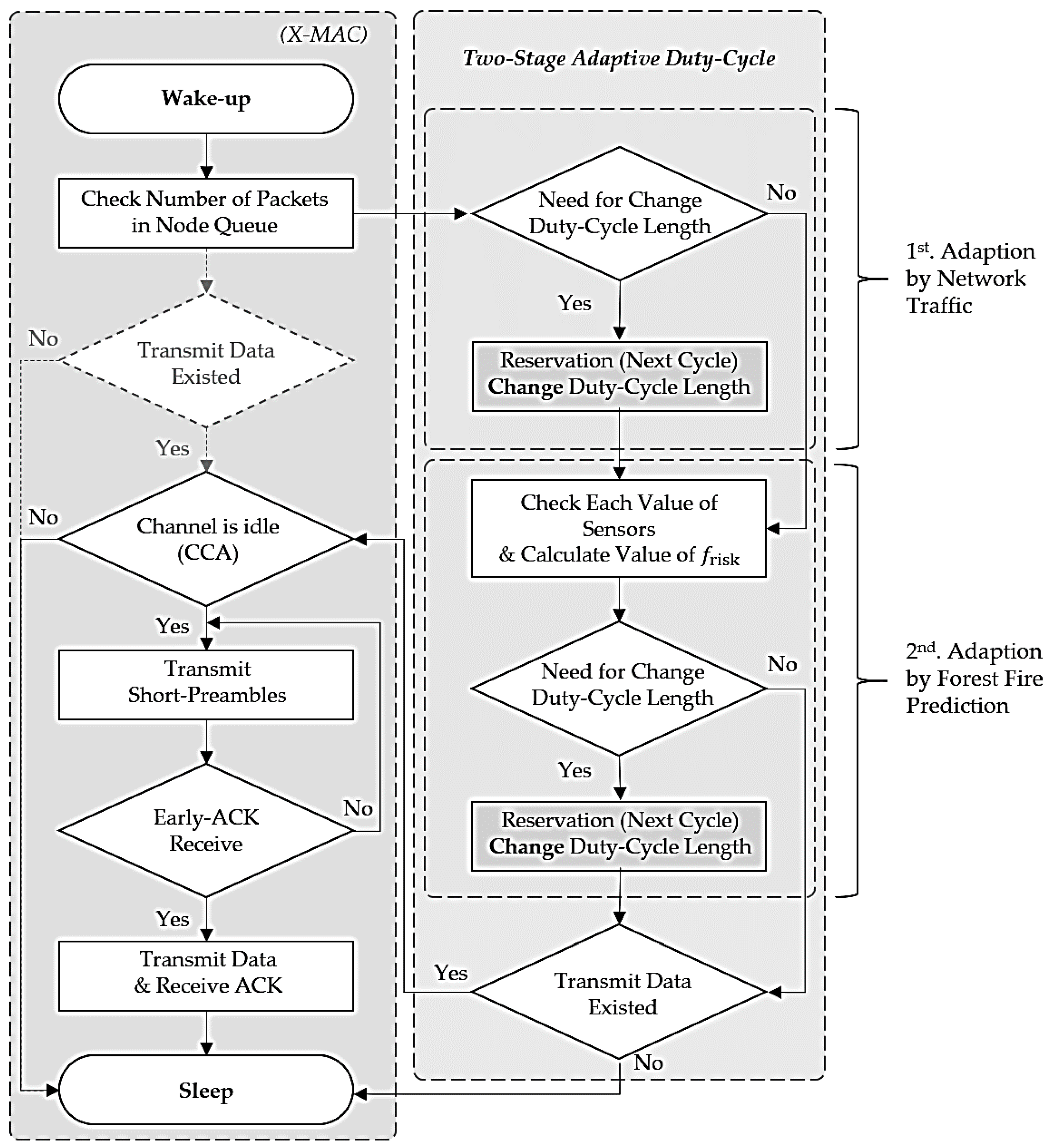
Figure 4 shows the proposed adaptive duty-cycled hybrid X-MAC (ADX-MAC) protocol [
9].
Normal X-MAC has a constant duty-cycle, whereas the proposed ADX-MAC duty-cycle, and hence sleep interval, changes according to the current situation. This has a similar effect to contention window (CW) [
10] for preventing collision, hence collision probability within a given time (slot) is significantly reduced because the node duty is staggered without Backoff [
11], reducing unnecessary delay. For example, when the number of packets in each node’s queue is less than the number of packets in the queue, the sleep cycle is increased by decreasing the duty-cycle, reducing energy consumption. On the other hand, when the number of packets increases, particularly when the queue maximum is reached, the duty-cycle is increased, but as little as possible, shortening the sleep interval, and traffic can be quickly resolved. Adapting the duty-cycle to the traffic situation improves energy efficiency compared to throughput by adjusting the unnecessary sleep interval and the time when the node wakes up.
3.2. Proposed Adaptive Duty-cycled Hybrid X-MAC
The proposed ADX-MAC condition for controlling duty-cycle length is the number of packets in the queue and value.
Figure 5 shows that the proposed ADX-MAC header components are almost identical to the X-MAC. However, when the sender sends data to the receiver and the receiver and sender have a similar cycle, the sender’s duty-cycle length is included in the header content and may also be included in the Early-ACK or ACK transmission, in contrast to the usual MAC header.
Figure 6 shows the proposed ADX-MAC algorithm. When the sender wakes up, it first checks the node queue status too determine if there is data to be sent, and if so, operates identically to the X-MAC algorithm, except that X-MAC checks channel status immediately, whereas ADX-MAC first checks duty-cycle length to determine if change (adjust) is required. If duty-cycle length needs to change, this is scheduled (reserved) for the next cycle. If no change is required, the process proceeds to the next step.
The ratio of the number of packets in the queue to the total maximum queue length determines the duty-cycle length for the queue:
where
Q(
t) is the number of packets queued at current time,
t; and
is the maximum number of packets that can be queued.
It is then decided whether to change duty-cycle length according to . If there is data to send immediately, then any duty-cycle change is scheduled for the next cycle. If no change is required the node checks channel status and then transmits the short preamble until it receives Early-ACK. After the data is transmitted the node switches to sleep state.
The increase rate per unit time is:
where
is the previous time unit and
t is the current time unit.
This is divided into two stages because forest fires develop extremely quickly, and traffic congestion can occur during a one-time unit. Therefore,
Q(
t) measure channel congestion and
predict and respond quickly to the situation before it occurs, sending emergency data without interruption as the forest fire develops. Thus, combining Equations (3) and (4), the new adaptive duty-cycle is:
where
is an arbitrary threshold to limit
. Thus, the applied duty-cycle length is:
which can grow very large for severe climate factor changes. Although
T depends on values obtained from Equations (3) and (4),
cannot be smaller than the listen time,
, if calculated
T <
,
, and hence duty-cycle ratio = 100%.
4. Experimental Results
The first experiment compares the throughput and energy consumption with X-MAC to confirm the performance of the proposed protocol, ADX-MAC. However, the number of nodes in this experiment is limited to 5 to 60. The reason for this is that, since the characteristics of the sensor MAC protocol, the collision rate is close to 99% as long as the CW is not significantly larger than 60 since the performance is significantly lowered. That is, it is the same as the case where all the nodes simultaneously send data during the unit interval in the saturation situation. Therefore, it is possible to confirm the difference in performance between two protocols in a real environment even with this experiment alone. The simulator used in this experiment was a proven NS-2 based simulator [
12,
13].
Verification in the actual forest fire situation is the most accurate, but it is difficult to generate forest fires artificially. The condition of spontaneous ignition is due to the combination of various climatic factors. Of course, social issues are also included. Therefore, in the second experiment for the forest fire prediction model, each climate factor was measured through an Arduino sensor for a certain unit time. And we confirmed that these measured values matched the duty-cycle length properly.
4.1. Comparison with X-MAC
Table 5 shows the simulation environment employed. The simulation assumed the same environment and topography for both models, in particular, node distances were the same, packet generation used the constant bit rate method, and the network was always unsaturated.
Throughput was calculated as
where
is the number of ACKs received by the sender until the end of the simulation;
is the packet size; and
and
indicate the time the simulation ended and started, respectively.
Energy consumption was calculated as:
where
is the power used until the end of the simulation, and
is the total number of nodes.
This experiment did not consider
, because there would be little throughput effect if this was included.
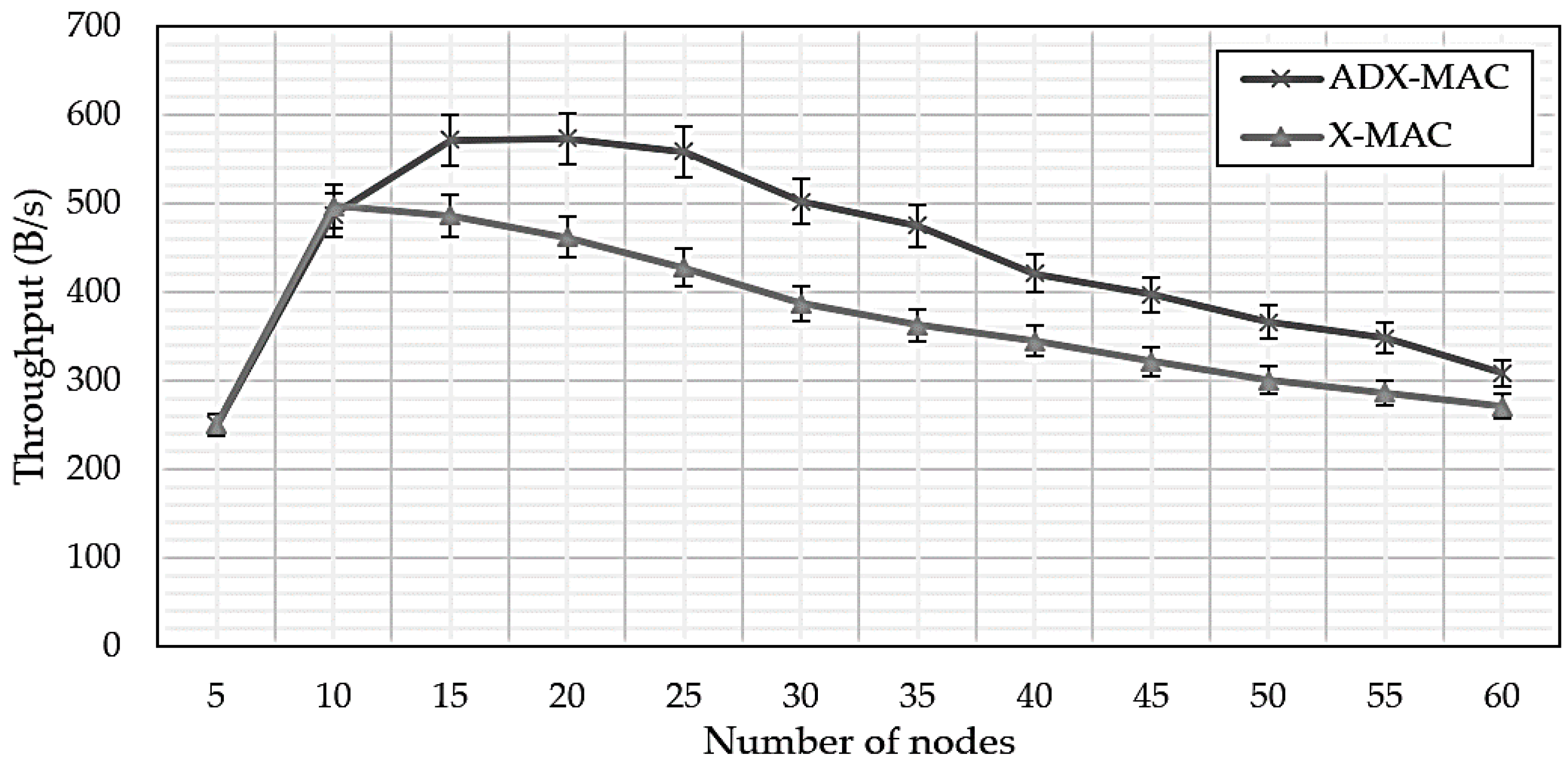
Figure 7 compares ADX-MAC and X-MAC throughput. Efficiency is similar up to nodes = 10, but ADX-MAC has an average efficiency approximately 24% higher than X-MAC once nodes = 15, and this advantage persists up to quite large networks.
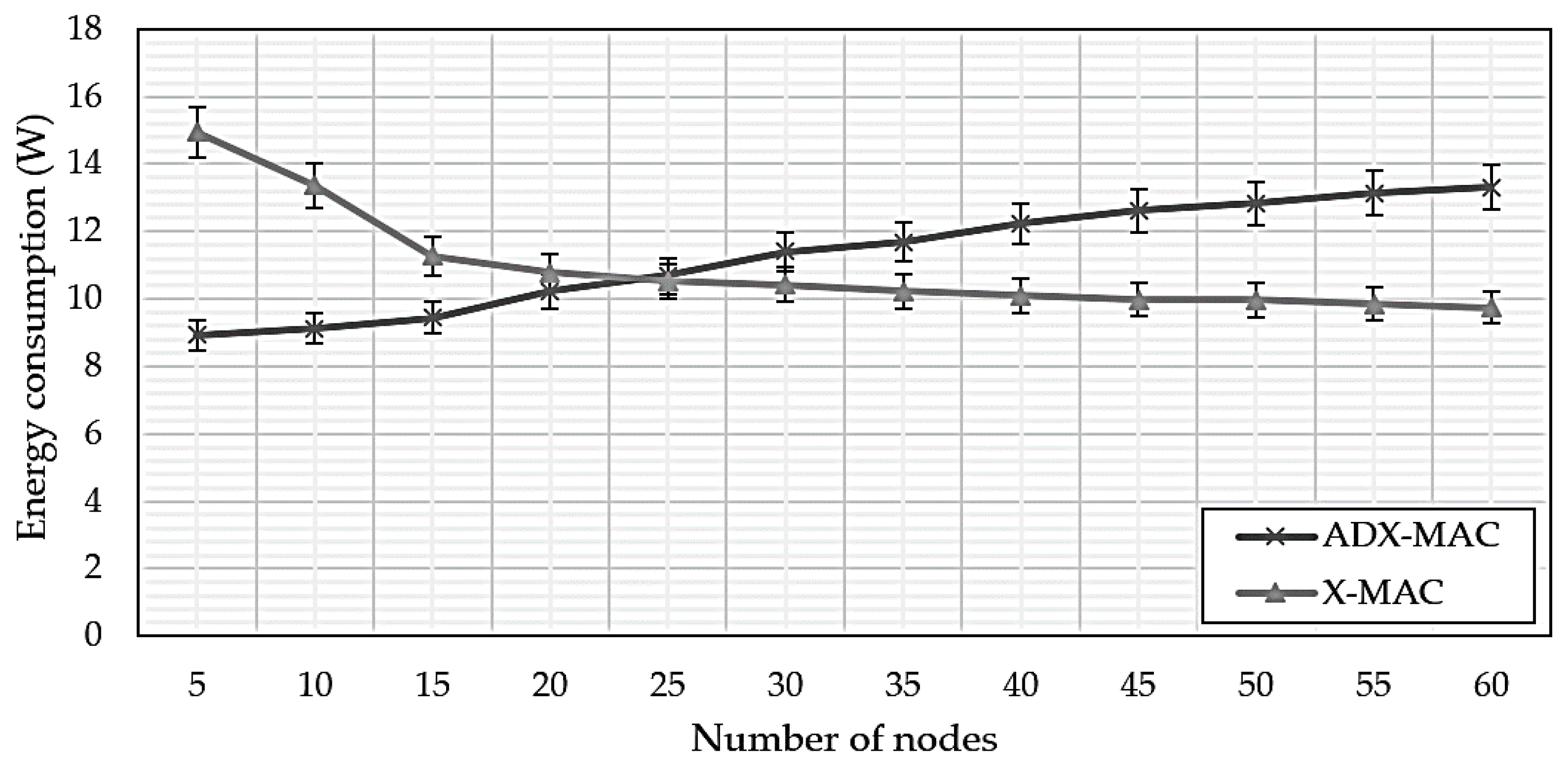
Figure 8 compares ADX-MAC and X-MAC energy consumption. Average ADX-MAC efficiency was approximately 18% lower than that of X-MAC up to nodes = 25, which then extended to 24% lower. This result is due to the fact that ADX-MAC performs transmission about 1/4 the rate of X-MAC as the number of nodes increases.
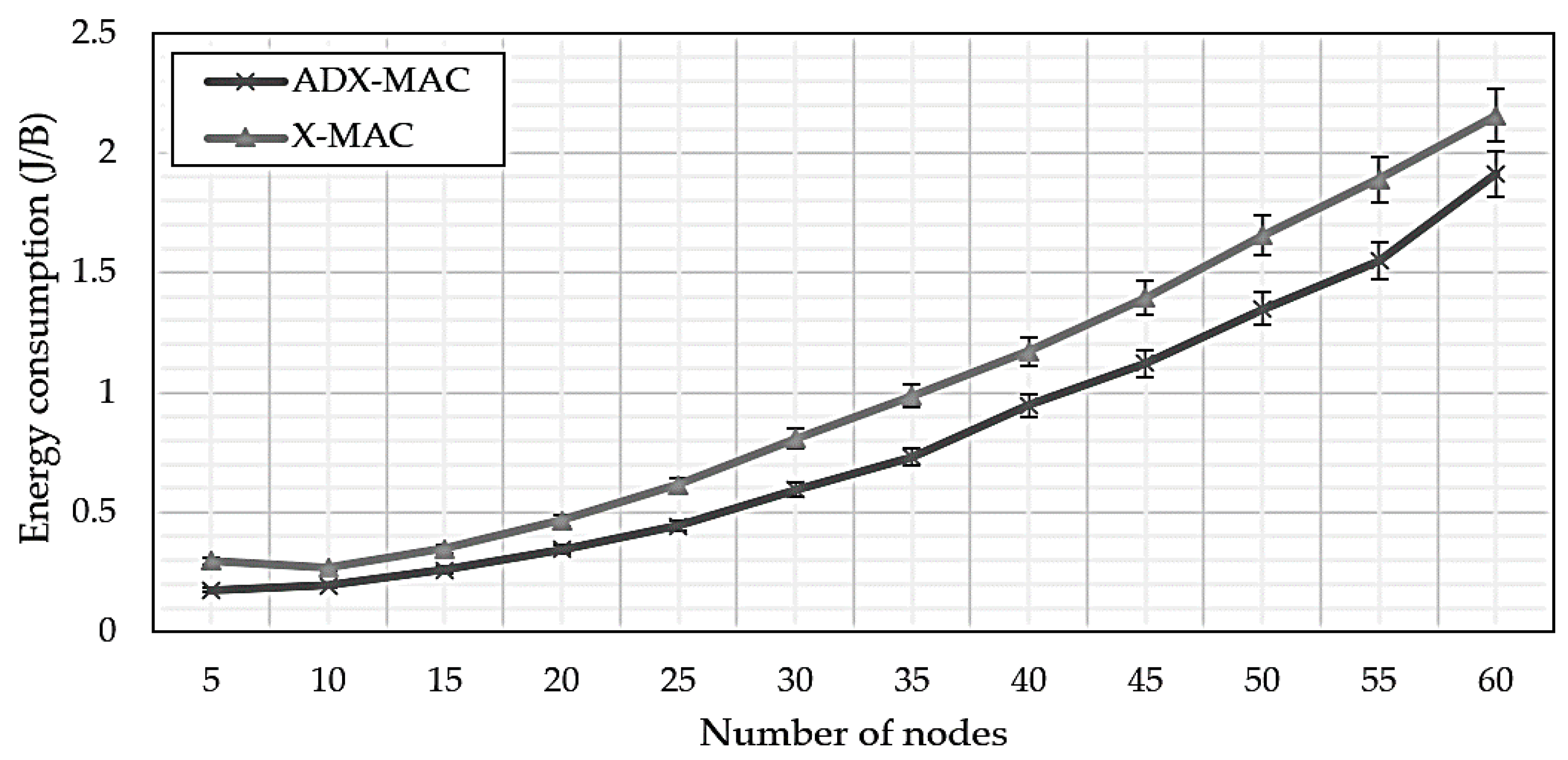
Figure 9 compares ADX-MAC and X-MAC energy consumption per byte, i.e., the average amount of energy consumed to transmit one byte until the simulation ended, calculated as:
The amount of energy consumed per byte can be said to be always good because the ADX-MAC consumes less than the X-MAC over the number of intervals of all nodes. Although the efficiency of ADX-MAC is about 28% higher than that of X-MAC until the number of nodes is 35, the efficiency drops rapidly after that. However, the average number of nodes is about 17% in the range of 40 to 60. In conclusion, it shows about 24% efficiency in the all number of nodes.
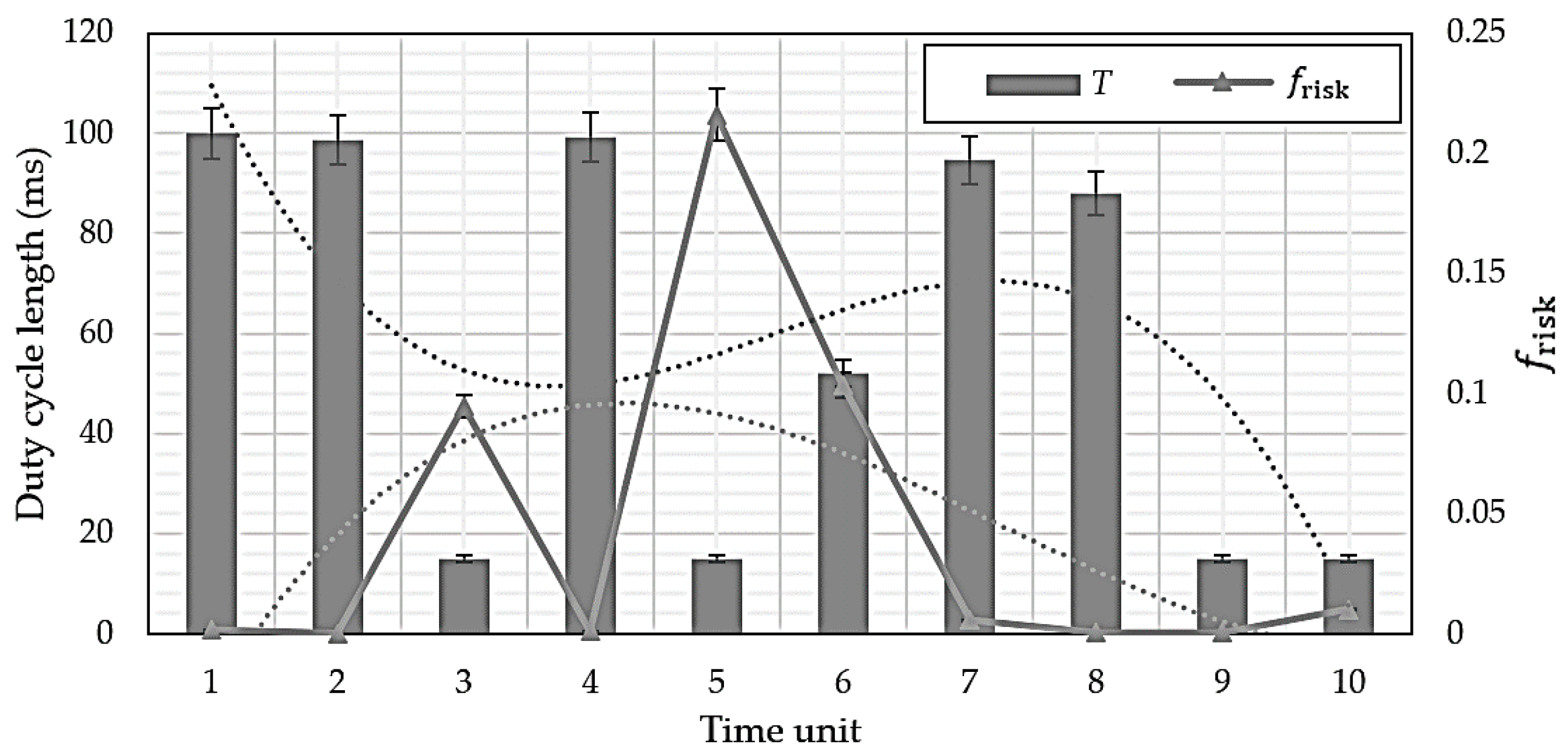
4.2. Adaptive Duty-Cycle Length Due to Climatic Factors
This experiment investigated how
T varied with measured climate factor values. Network setup and parameters were the same as in
Section 4.1, but this experiment did not consider the state of the queue, similar to the treatment for
in
Section 4.1.
Figure 10 shows the
T changes for each climate factor, considering only the factor of interest to be changing, whereas
Figure 11 considers all climatic factors. High
derived from the forest fire prediction model means forest fire probability is high, hence
T is shortened, and sensing is performed at a shorter cycle per unit time.
5. Conclusions
This paper proposed a forest fire prediction method, i.e., the adaptive duty-cycled hybrid X-MAC (ADX-MAC) protocol, which is based on sensor data to reduce human and economic costs using Wireless Sensor Network (WSN) MAC protocol. The key factors of the proposed method were to adapt duty-cycle length through two stages with different factors. The two stages addressed that forest fires occur very quickly and significant sensor data traffic congestion can occur during a single time unit. The first stage factor is , derived from the forest fire prediction model, and the second stage factor was the number of packets in the node queue. Thus, ADX-MAC could adjust T when considering both the traffic situation and forest fire probability.
The proposed approach was verified experimentally by comparing it with X-MAC, and confirmed that ADX-MAC average throughput and energy efficiency were approximately 19% and 24% superior to X-MAC, respectively. Duty-cycle length changes with were also investigated, and T was shortened as forest fire probability increased, ensuring forest fires could be detected faster.
The proposed ADX-MAC protocol for forest fire detection is suitable for various natural disasters. Even if the forest fires are limited, ADX-MAC sensors could be incorporated into existing infrastructure to significantly reduce economic costs.
Author Contributions
Idea and conceptualization: J.-G.K. and D.-W.L.; Methodology: J.-G.K. and J.-W.J.; Software: J.-G.K.; Analysis: J.-G.K.; Visualization, J.-G.K. and D.-W.L.; Project administration: J.-W.J.
Funding
This research was supported by the Ministry of Science and ICT, Korea, under the National Program for Excellence in Software supervised by the Institute for Information & Communications Technology Promotion (2016-0-00017) and the Basic Science Research Program through the National Research Foundation of Korea funded by the Ministry of Education, Science and Technology (2015R1D1A1A09061368).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Statistics Korea. 2017. Available online: http://kostat.go.kr (accessed on 25 June 2017).
- International Forest Fire Symposium, Korea National Forest Science Institute. 2016. Available online: http://www.kfri.go.kr (accessed on 25 June 2017).
- Yang, O.; Heinzelman, W.B. Modeling and Performance Analysis for Duty-cycled MAC Protocols with Applications to S-MAC and X-MAC. IEEE Trans. Mob. Comput. 2012, 11, 905–921. [Google Scholar] [CrossRef]
- Lee, J.-H.; Eom, D.-S. A Study of Variable Wakeup Period for Duty-cycled MAC protocol in WSN. J. Inst. Electron. Eng. Korea 2012, 49, 45–55. [Google Scholar] [CrossRef]
- Buettner, M.; Yee, G.V.; Anderson, E.; Han, R. X-MAC: A Short Preamble MAC Protocol for Duty-cycled Wireless Sensor Networks. In Proceedings of the 4th International Conference on Embedded Networked Sensor Systems, Boulder, CO, USA, 31 October–3 November 2006; pp. 307–320. [Google Scholar]
- Kim, J.-H. Forest Fire Prediction Model Using Weather Data. Master’s Thesis, Korea University, Seoul, Korea, 2017. [Google Scholar]
- Korea Forest Service. 2017. Available online: http://www.forest.go.kr (accessed on 20 August 2018).
- Polastre, J.; Hill, J.; Culler, D. Versatile Low Power Media Access for Wireless Sensor Networks. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 95–107. [Google Scholar]
- Kang, J.-G.; Kim, G.-Y.; Park, S.-H.; Lim, D.-W.; Kang, H.-G.; Jung, J.-W. According to the Traffic Conditions, Duty-cycle Ratio is Changed Hybrid X-MAC Protocol in Networks. In Proceedings of the ITFE Summer Conference, Gangwon, Korea, 1–2 September 2017; pp. 73–74. [Google Scholar]
- Weng, C.-E.; Chen, C.-Y. The Performance Study of Optimal Contention Window for IEEE 802.11 DCF Access Control. In Proceedings of the 2012 IEEE 75th Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012. [Google Scholar]
- Song, N.; Kwak, B.; Song, J.; Miller, L.E. Enhancement of IEEE 802.11 Distributed Coordination Function with Exponential Increase Exponential Decrease Backoff Algorithm. In Proceedings of the IEEE Vehicular Technology Conference (VTC), Jeju, Korea, 22–25 April 2003; Volume 4, pp. 2775–2778. [Google Scholar]
- Network Simulator Manual. Available online: http://www.isi.edu/nsam/ns/index.html (accessed on 20 August 2018).
- Fall, K.; Varadhan, K. The ns Manual (Formerly ns Notes and Documentation); The VINT Project; UC Berkeley: Berkeley, CA, USA, 2003. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}