Optimization-Based Wi-Fi Radio Map Construction for Indoor Positioning Using Only Smart Phones

Abstract
:1. Introduction
2. Related Work
2.1. Pedestrian Dead-Reckoning
2.2. Factor Graph-Based Optimization
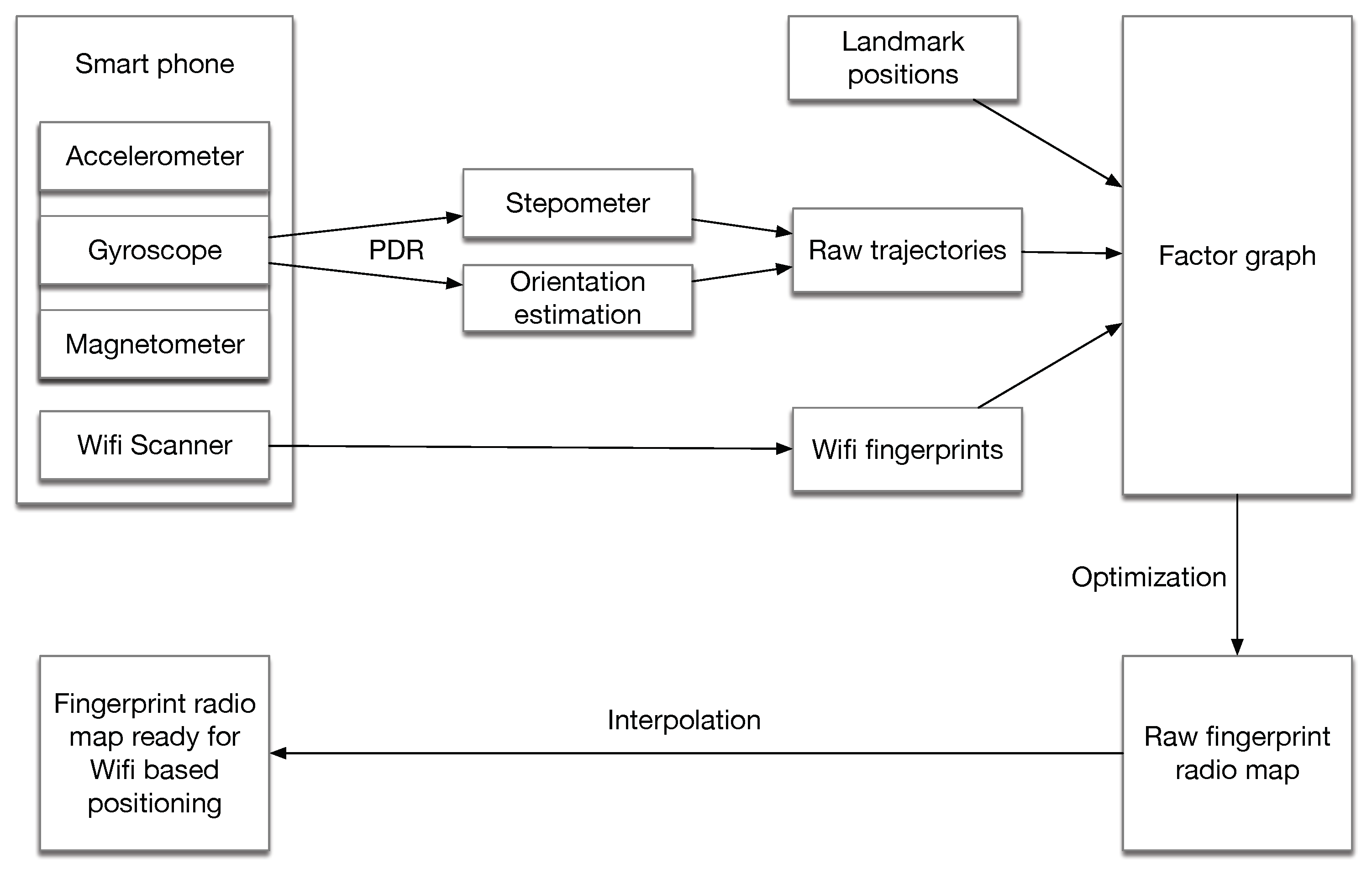
3. Trajectory Generation Based on PDR
3.1. Orientation Estimation
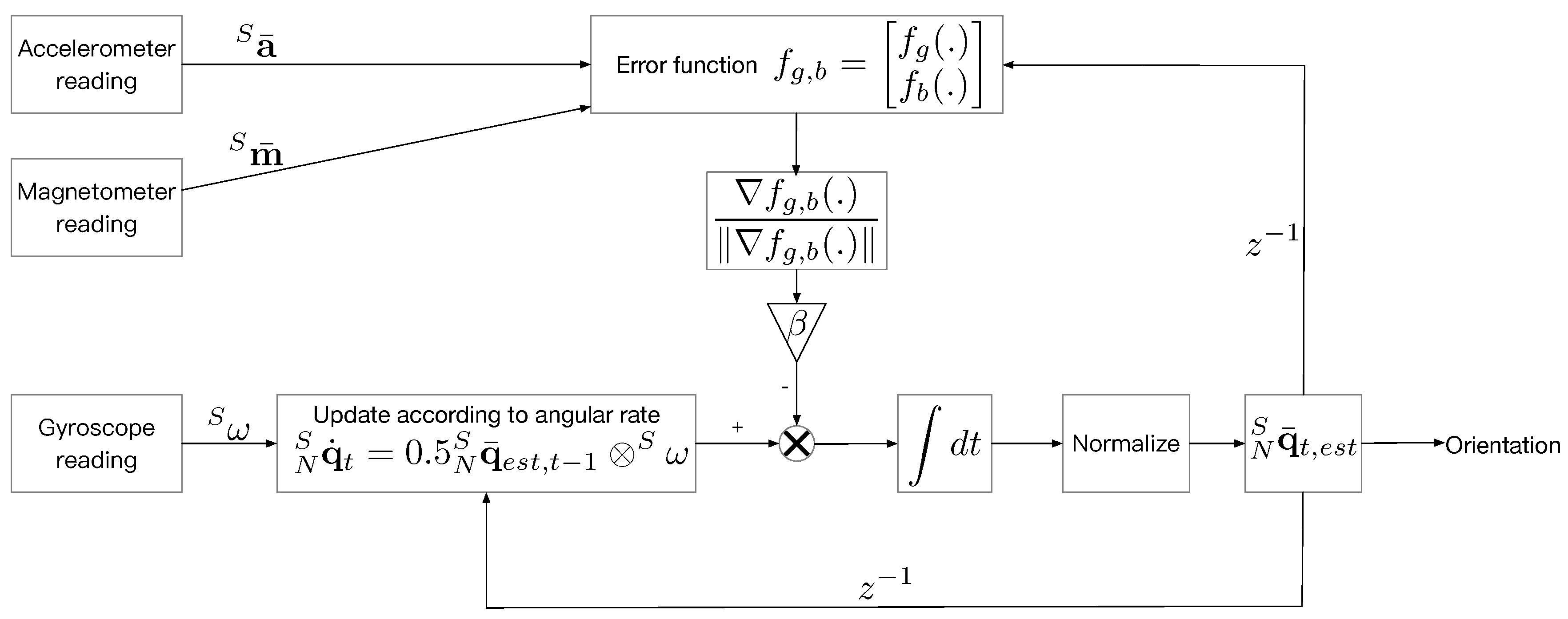
- Orientation updates based on angular rate measurements.To avoid singularities, a quaternion representation is adopted here. The attitude of the phone can be updated according to the angular rate measurements in Equation (2)here is the measured angular rate from the gyroscope. The superscript S denotes the sensor frame and the subscript N denotes the navigation frame. denotes the quaternion derivative describing change rate of the navigation frame relative to the sensor frame. ⊗ is the quaternion product operation and the bar of denotes the normalization operation of a quaternion. For discrete time implementation, it isis the sampling interval of the gyroscope and we set it to 0.01 s in our implementation. Using Equation (3), the quaternion of the attitude can be updated. However, the error of the attitude is accumulative due to gyroscope drifts.
- Forming the error function. To estimate the attitude more accurately, the measurements from the magnetometer and the accelerometer is adopted. An error function is formed for such purposes in Equation (4).* is the quaternion adjoint operation. The error function denotes the differences of normalized measurements (accelerometer measurements or magnetometer measurements) between representation in the sensor frame () and derived representation in the sensor frame () from the representation in the navigation frame (). Noting that and has a normalized quaternion representation.Specifically, for the accelerometer measurements, and is replaced by and respectively, wherehere the is the normalized readings from the accelerometer. Noting that there is only one non-zero element in , because when the phone is stationary or quasi-stationary, the only accelerometer should be the z-axis gravity.For the magnetometer measurements, and is replaced by and respectively, wherehere the is the normalized reading from the magnetometer. In the navigation frame, the magnetic field can be considered only has horizontal component and vertical component, so only has two component. With the magnetometer readings and the accelerometer readings, the combined error function can be written aswhere is formed by replacing and in Equations (4) and (5), and is formed by replacing and in Equations (4)–(6). Then we haveandare the components of the quaternion .
- Gradient descent for orientation estimation. To minimize the error function, the gradient descent method is adopted. Noting that here we only update the current estimation per time sample according tois the gradient of the error function and is a proper scale controlling descending velocity. Same as [30], is set towhere is the sampling interval.Combined with Equation (3), the attitude update process can be written aswhere the coefficient isis the maximum gyroscope measurement error. The derivation of is explained in detail in [30] and is directly used in our paper. Then from the attitude quaternion, we can solve for the heading angle as the orientation .
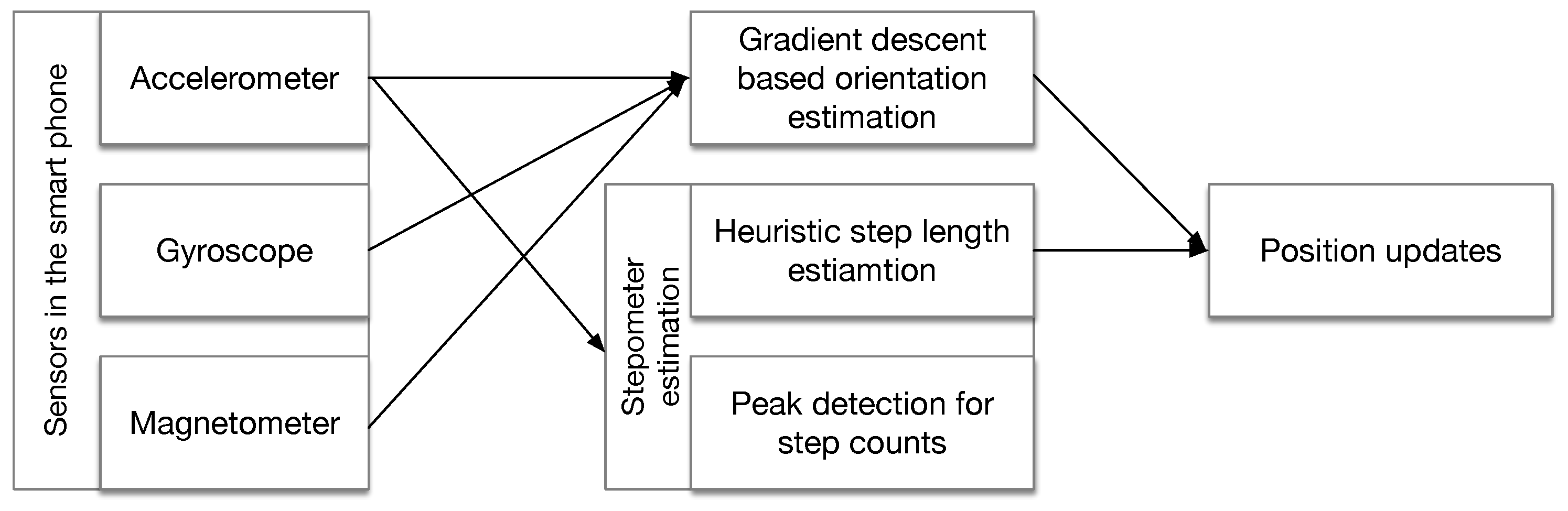
3.2. Stepometer Estimation
4. Factor Graph Optimization for RM Generation
4.1. PDR-Based Error Energy
4.2. Wi-Fi-Based Error Energy
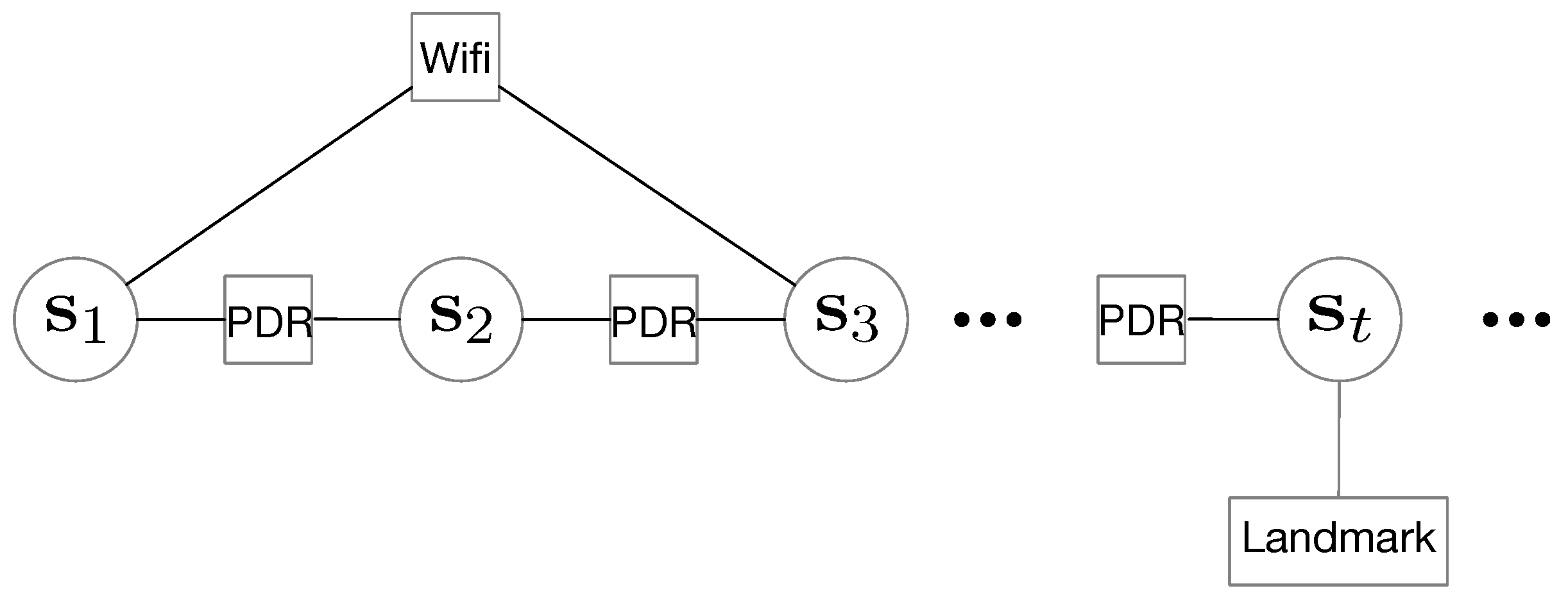
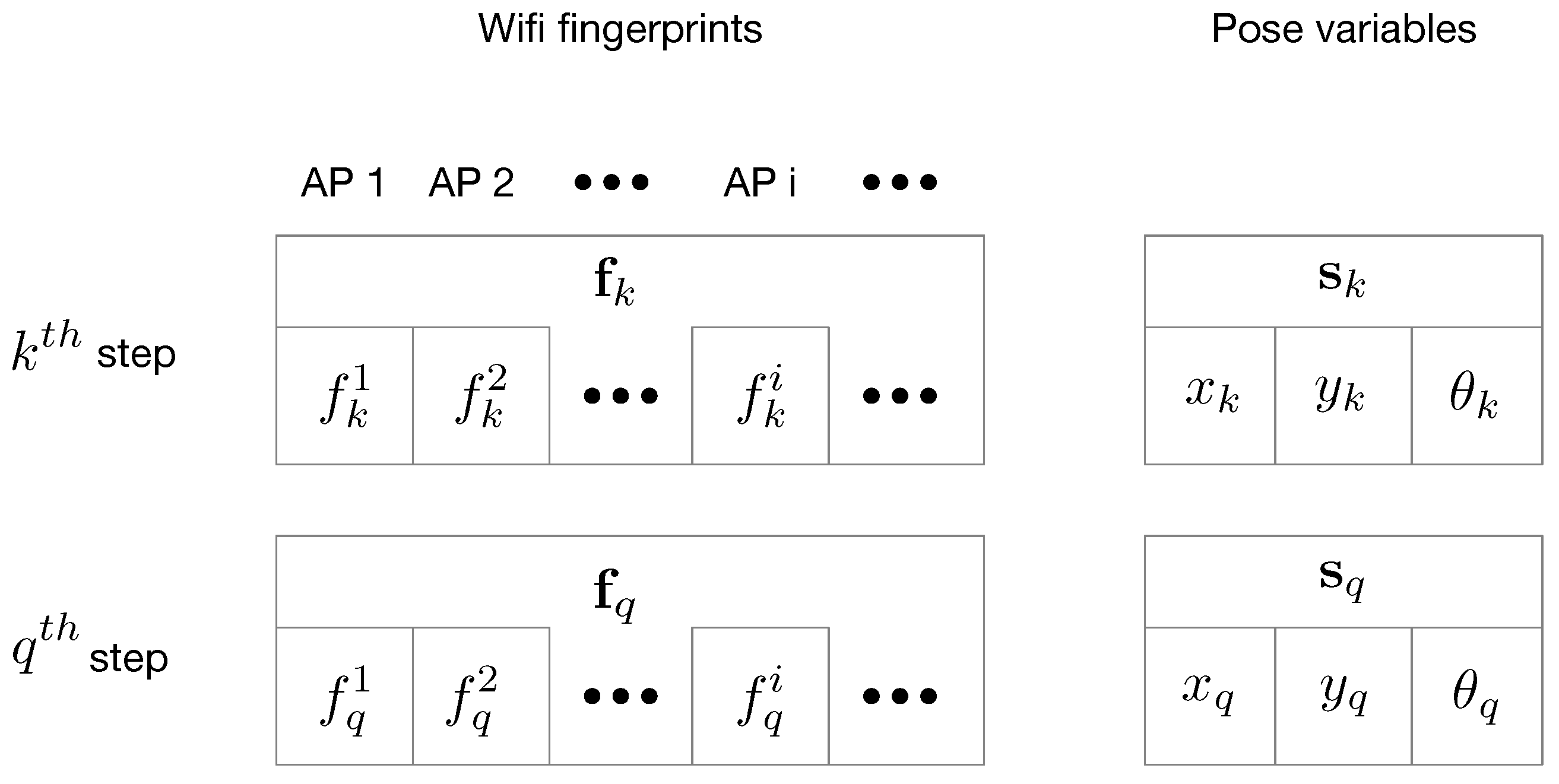
- Find the distance between two fingerprints at the and step.In Wi-Fi-based fingerprinting methods, a common assumption is often held true: if two fingerprints are with vicinity in signal space, then the positions where the fingerprints are collected are with vicinity in the coordinate space. In our method, we also find the correspondences of positions by solving for the vicinities in signal space. We compare two arbitrary Wi-Fi fingerprints and which are collected at the step and the step (). Then we define their distance in signal space like this using a metric similar to [6]where the superscript i on denotes the RSS from the AP in the vector , and N is the number of AP in the vector. The correspondences of the fingerprints and the pose variables are shown in Figure 5.
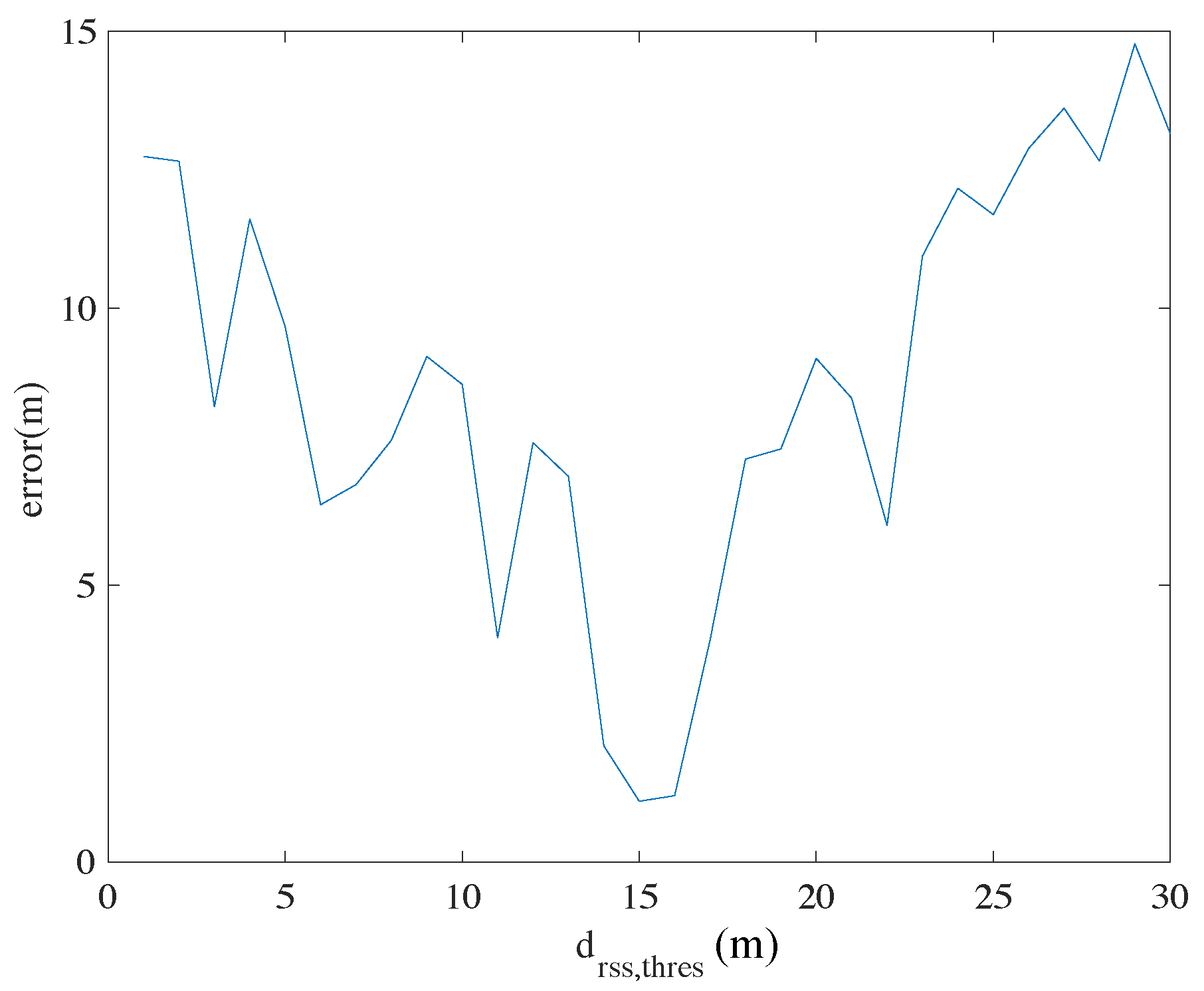
- Find the error according to the distance in the signal space.In our implementation, if two fingerprints’ distance is less than a pre-defined threshold, the distances of the corresponding poses should be within a threshold (with vicinity). Then we define the Wi-Fi-based error like thiswhere means the Euclidian distance between the horizontal positions of and calculated from the pose variables and . Figure 6 shows the relationships between the mean positioning errors and different values of in the experiment (details of the experiment will be described in Section 5). We can see that in our implementation, the mean error reaches the lowest around . This value is thus adopted for creating Wi-Fi-based constraints.
4.3. Landmark-Based Error Energy
5. Experiment
5.1. Experimental Setup
- Generate the raw trajectories based on the PDR algorithm. The sampling rate of the accelerometer, gyroscope and magnetometer sensors in the phone is set to 100 Hz. The readings from these sensors can be processed in real time and can generate inertial-based raw trajectories. These poses of the trajectories with timestamps of the phone’s system time are saved as file.
- Collect Wi-Fi-based fingerprints. The Wi-Fi scanner on the phone is set to continuous scan mode with scanning interval of 1 s. However, the actual scanning interval can only reach about 2.5 s (due to system limitations). The fingerprints along with their collecting time are also saved as a file.
- Record landmarks by pressing the landmark button. When walks to a pre-defined landmark, the user can press the buttons on the phone to record the time and landmark number.
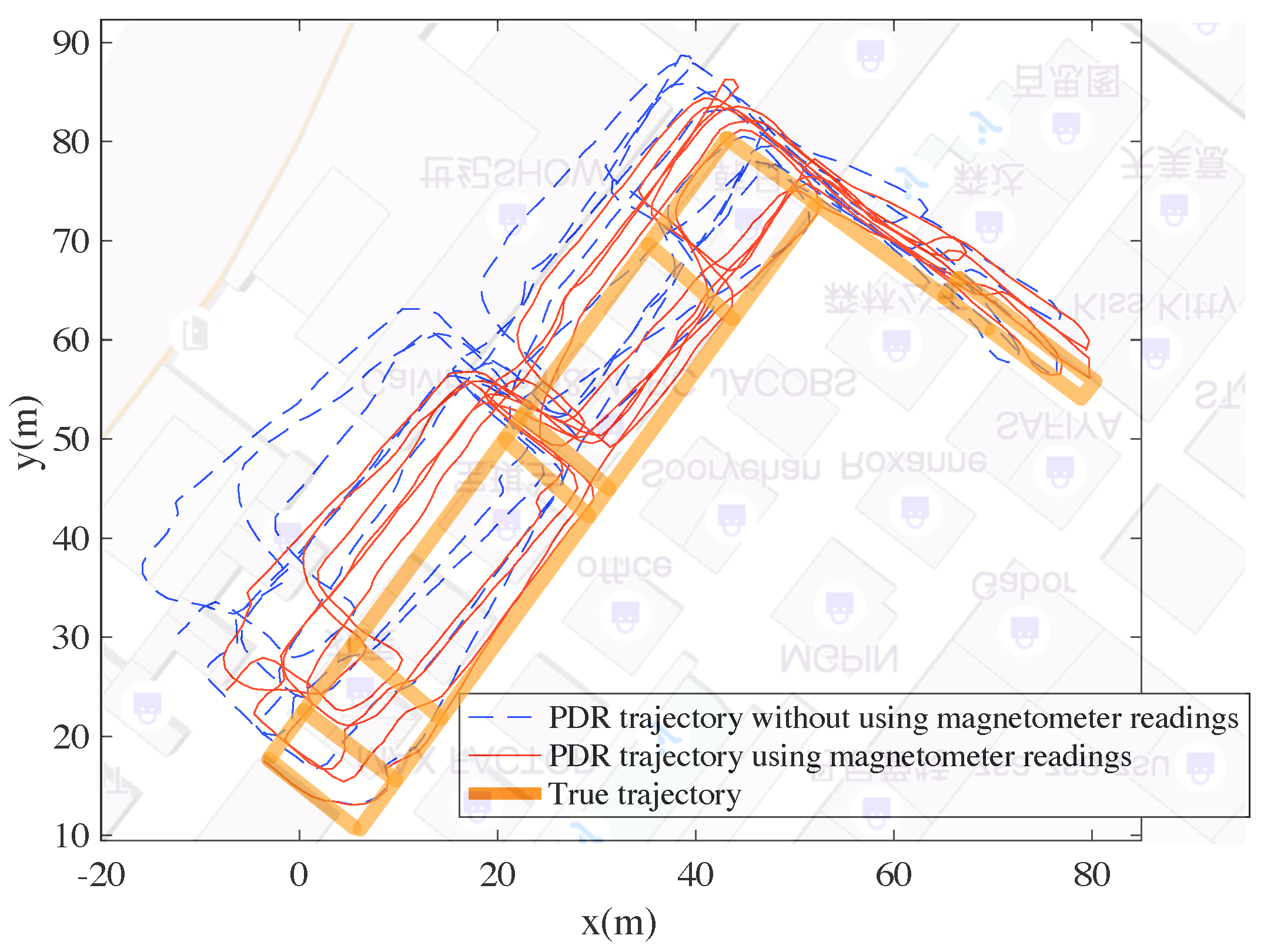
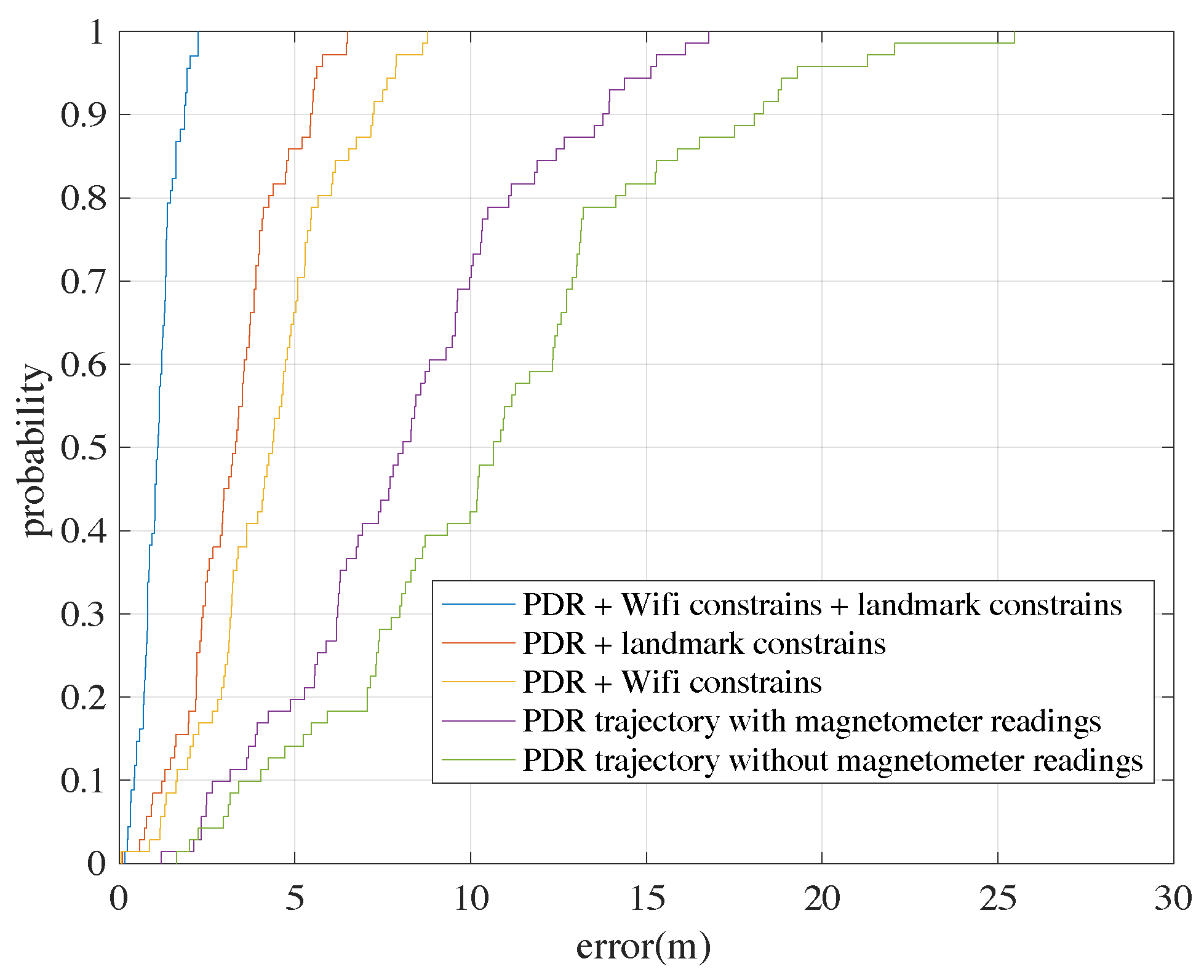
5.2. Raw Trajectories Based on PDR
5.3. Factor Graph Optimization Results
- Wi-Fi fingerprints
- landmark positions
- Wi-Fi fingerprints and landmark positions
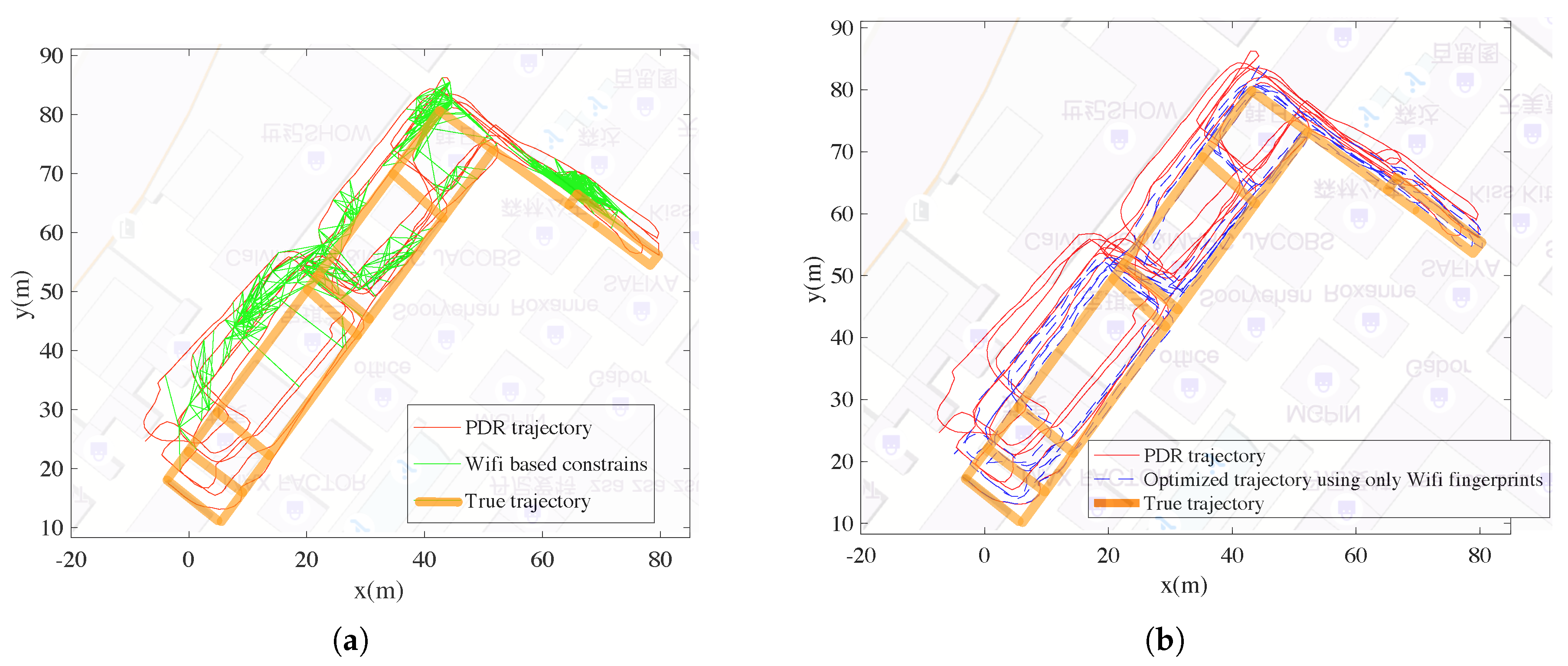
5.3.1. Results for Fusing PDR Trajectory and Wi-Fi-Based Constraints
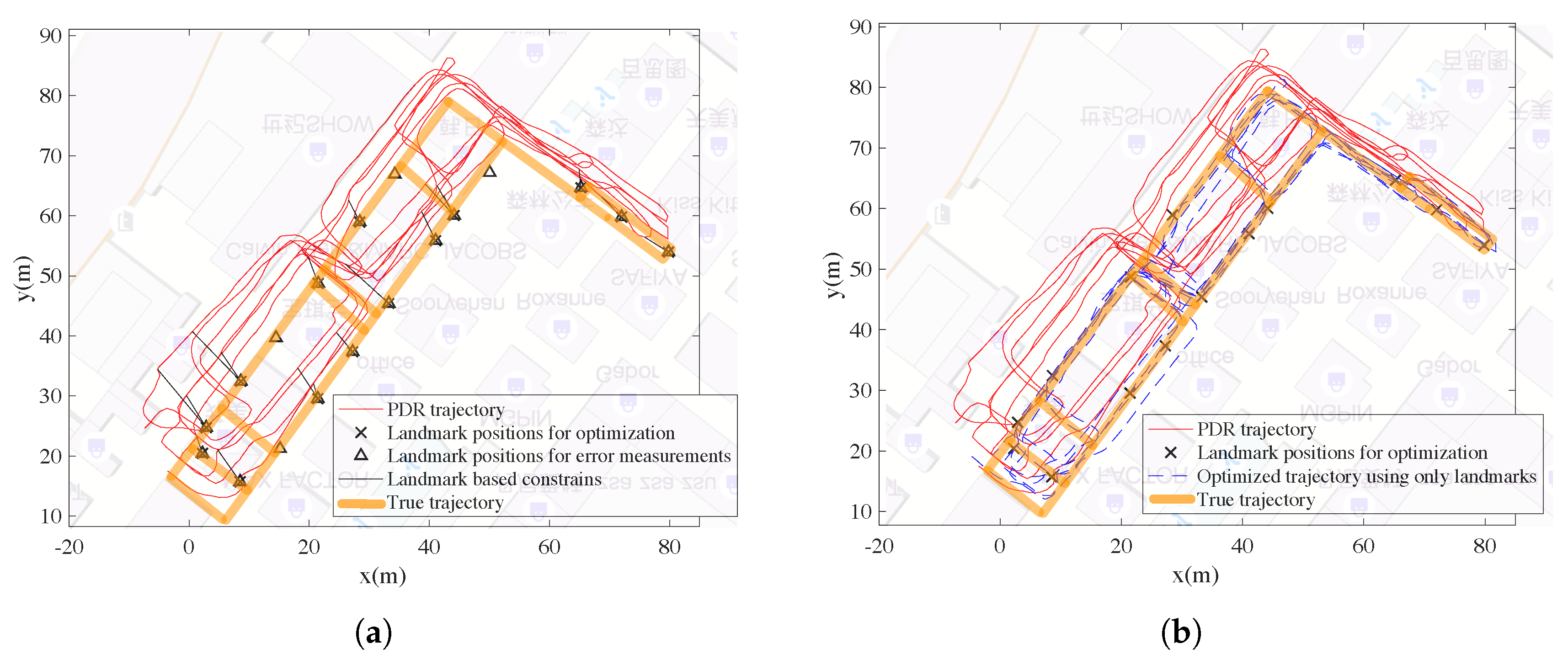
5.3.2. Results for Fusing PDR Trajectory and Landmark Based Constraints
5.3.3. Results for Fusing PDR Trajectory, Wi-Fi-Based Constraints and Landmark-Based Constraints
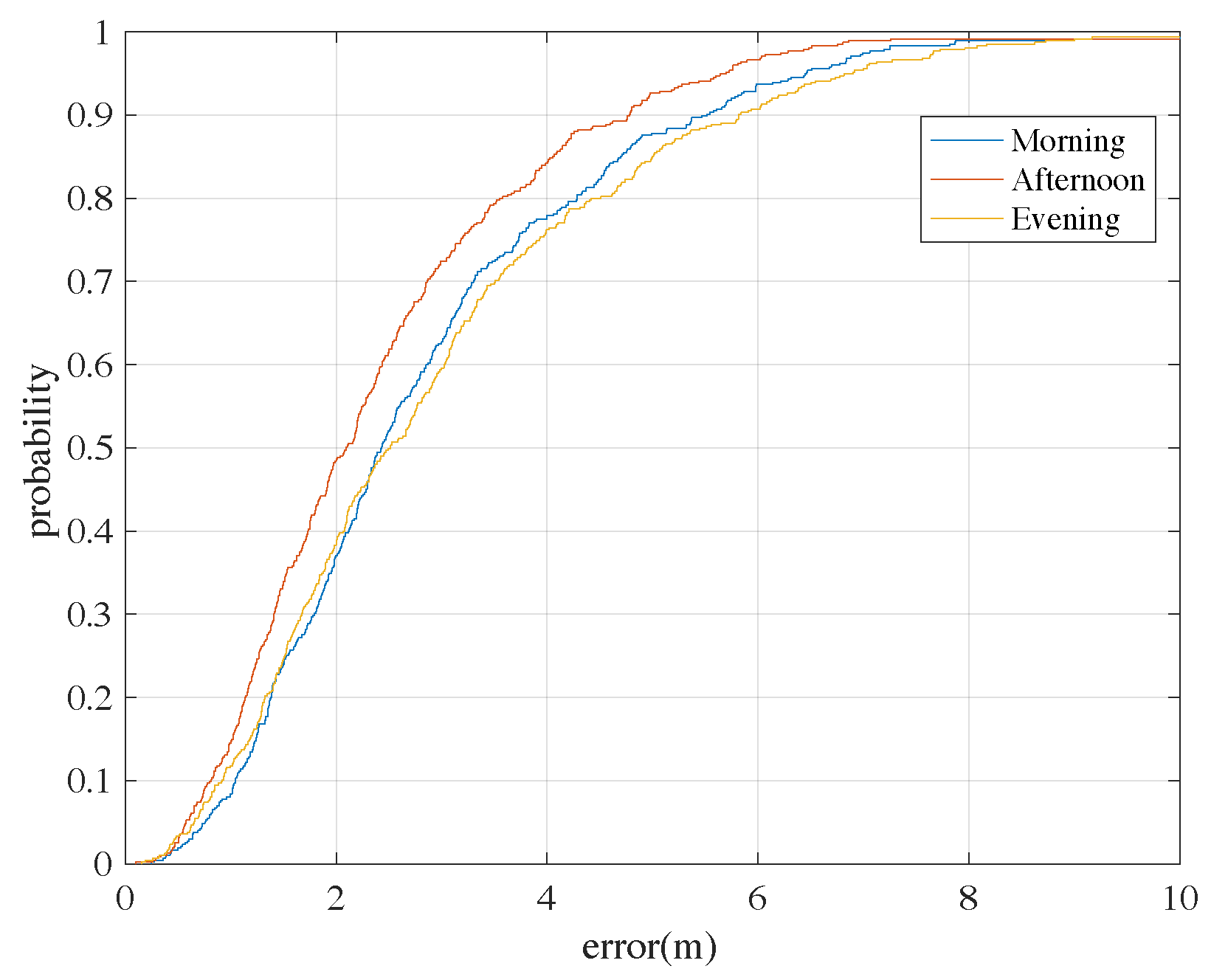
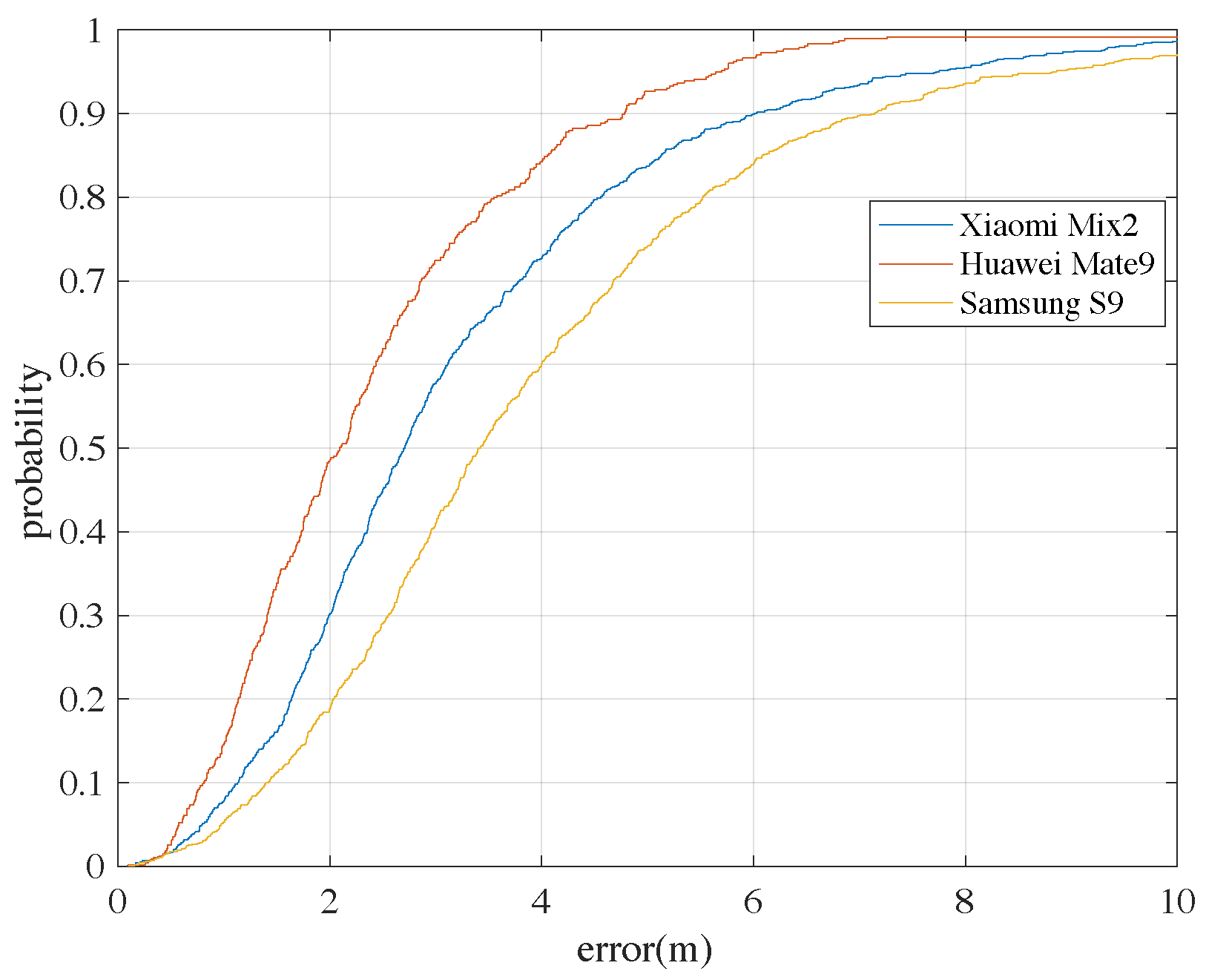
5.4. Wi-Fi-Based Positioning Results Adopting the Generated RM
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| RSSI | received signal strength indication |
| APs | access points |
| RPs | reference points |
| RM | radio map |
| kNN | k-nearest neighbor |
| IMUs | inertial measurement units |
| CS | compressed sensing |
| LASSO | randomized least absolute shrinkage and selection operator |
| GP | gaussian process |
| PDR | pedestrian dead reckoning |
| MEMS | Micro-Electro-Mechanical System |
| SLAM | simultaneous localization and mapping |
| LSO | least square optimization |
References
- Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU. In Proceedings of the 2010 7th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp. 135–143. [Google Scholar] [CrossRef]
- Yang, S.; Li, Q. Inertial Sensor-Based Methods in Walking Speed Estimation: A Systematic Review. Sensors 2012, 12, 6102–6116. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000, Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A. The Horus WLAN Location Determination System. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Seattle, WA, USA, 6–8 June 2005; ACM: New York, NY, USA; pp. 205–218. [Google Scholar] [CrossRef]
- Gu, Y.; Zhou, C.; Wieser, A.; Zhou, Z. WiFi based trajectory alignment, calibration and crowdsourced site survey using smart phones and foot-mounted IMUs. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Nowicki, M.; Skrzypczyński, P. Indoor Navigation with a Smartphone Fusing Inertial and WiFi Data via Factor Graph Optimization; Sigg, S., Nurmi, P., Salim, F., Eds.; Mobile Computing, Applications, and Services; Springer International Publishing: Cham, Switzerland, 2015; pp. 280–298. [Google Scholar]
- Liu, H.H. The Quick Radio Fingerprint Collection Method for a WiFi-Based Indoor Positioning System. Mob. Netw. Appl. 2017, 22, 61–71. [Google Scholar] [CrossRef]
- Liu, H.H.; Liu, C. Implementation of Wi-Fi Signal Sampling on an Android Smartphone for Indoor Positioning Systems. Sensors 2018, 18, 3. [Google Scholar] [CrossRef] [PubMed]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-Signal-Strength-Based Indoor Positioning Using Compressive Sensing. IEEE Trans. Mob. Comput. 2012, 11, 1983–1993. [Google Scholar] [CrossRef]
- Khalajmehrabadi, A.; Gatsis, N.; Pack, D.J.; Akopian, D. A Joint Indoor WLAN Localization and Outlier Detection Scheme Using LASSO and Elastic-Net Optimization Techniques. IEEE Trans. Mob. Comput. 2017, 16, 2079–2092. [Google Scholar] [CrossRef] [Green Version]
- Atia, M.M.; Noureldin, A.; Korenberg, M.J. Dynamic Online-Calibrated Radio Maps for Indoor Positioning in Wireless Local Area Networks. IEEE Trans. Mob. Comput. 2013, 12, 1774–1787. [Google Scholar] [CrossRef]
- Rakovic, V.; Angjelicinoski, M.; Atanasovski, V.; Gavrilovska, L. Location estimation of radio transmitters based on spatial interpolation of RSS values. In Proceedings of the 2012 7th International ICST Conference on Cognitive Radio Oriented Wireless Networks and Communications (CROWNCOM), Stockholm, Sweden, 18–20 June 2012; pp. 242–247. [Google Scholar] [CrossRef]
- Kubota, R.; Tagashira, S.; Arakawa, Y.; Kitasuka, T.; Fukuda, A. Efficient Survey Database Construction Using Location Fingerprinting Interpolation. In Proceedings of the 2013 IEEE 27th International Conference on Advanced Information Networking and Applications (AINA), Barcelona, Spain, 25–28 March 2013; pp. 469–476. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhou, Z.; Xu, W.; Qi, J.; Guo, C.; Yi, P.; Zhu, T.; Xiao, S. Fingerprint-free tracking with dynamic enhanced field division. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Kowloon, Hong Kong, 26 April–1 May 2015; pp. 2785–2793. [Google Scholar] [CrossRef]
- Kim, K.H.; Kim, J.H.; Yoon, Y.J.; Seok, J.H.; Lim, J.W. Propagation model for the WLAN service at the campus environments. In Proceedings of the 57th IEEE Semiannual Vehicular Technology Conference, Jeju, Korea, 22–25 April 2003; Volume 1, pp. 196–200. [Google Scholar] [CrossRef]
- Howell, J.; Menguc, M.; Siegel, R. Thermal Radiation Heat Transfer; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Belmonte-Fernández, Ó.; Montoliu, R.; Torres-Sospedra, J.; Sansano-Sansano, E.; Chia-Aguilar, D. A radiosity-based method to avoid calibration for indoor positioning systems. Expert Syst. Appl. 2018, 105, 89–101. [Google Scholar] [CrossRef]
- Fuschini, F.; Vitucci, E.M.; Barbiroli, M.; Falciasecca, G.; Degli-Esposti, V. Ray tracing propagation modeling for future small-cell and indoor applications: A review of current techniques. Radio Sci. 2015, 50, 469–485. [Google Scholar] [CrossRef] [Green Version]
- Aly, H.; Youssef, M. New Insights into Wifi-based Device-free Localization. In Proceedings of the 2013 ACM Conference on Pervasive and Ubiquitous Computing Adjunct Publication, Zurich, Switzerland, 8–12 September 2013; ACM: New York, NY, USA; pp. 541–548. [Google Scholar] [CrossRef]
- Qian, J.; Pei, L.; Ma, J.; Ying, R.; Liu, P. Vector Graph Assisted Pedestrian Dead Reckoning Using an Unconstrained Smartphone. Sensors 2015, 15, 5032–5057. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zampella, F.; Khider, M.; Robertson, P.; Jiménez, A. Unscented Kalman filter and Magnetic Angular Rate Update (MARU) for an improved Pedestrian Dead-Reckoning. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 129–139. [Google Scholar] [CrossRef]
- Park, J.; Kim, Y.; Lee, J. Waist mounted Pedestrian Dead-Reckoning system. In Proceedings of the 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Daejeon, Korea, 26–28 November 2012; pp. 335–336. [Google Scholar] [CrossRef]
- Pratama, A.R.; Hidayat, R. Smartphone-based Pedestrian Dead Reckoning as an indoor positioning system. In Proceedings of the 2012 International Conference on System Engineering and Technology (ICSET), Bandung, Indonesia, 11–12 September 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Alvarez, D.; Gonzalez, R.C.; Lopez, A.; Alvarez, J.C. Comparison of step length estimators from weareable accelerometer devices. In Encyclopedia of Healthcare Information Systems; IGI Global: Hershey, PA, USA, 2006; Volume 1, pp. 5964–5967. [Google Scholar]
- Gu, Y.; Song, Q.; Li, Y.; Ma, M. Foot-mounted pedestrian navigation based on particle filter with an adaptive weight updating strategy. J. Navig. 2015, 68, 23–38. [Google Scholar] [CrossRef]
- Lourakis, M.I.A.; Argyros, A.A. SBA: A Software Package for Generic Sparse Bundle Adjustment. ACM Trans. Math. Softw. 2009, 36, 2. [Google Scholar] [CrossRef]
- Chen, Y.; Davis, T.A.; Hager, W.W.; Rajamanickam, S. Algorithm 887: CHOLMOD, Supernodal Sparse Cholesky Factorization and Update/Downdate. ACM Trans. Math. Softw. 2008, 35, 22. [Google Scholar] [CrossRef]
- Kümmerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. G2o: A general framework for graph optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar] [CrossRef]
- Agarwal, S.; Mierle, K. Ceres Solver. Available online: http://ceres-solver.org (accessed on 20 February 2018).
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Talvitie, J.; Renfors, M.; Lohan, E.S. Distance-Based Interpolation and Extrapolation Methods for RSS-Based Localization With Indoor Wireless Signals. IEEE Trans. Veh. Technol. 2015, 64, 1340–1353. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trajectroy | Mean Error (m) | Maximum Error (m) | Median Error (m) |
|---|---|---|---|
| PDR trajectory without magnetometer readings | 11.35 | 25.47 | 10.64 |
| PDR trajectory with magnetometer readings | 8.67 | 15.12 | 8.08 |
| PDR + Wifi constraints | 4.35 | 7.87 | 4.36 |
| PDR + landmark constraints | 3.12 | 5.56 | 3.32 |
| PDR + Wifi constrains + landmark constraints | 1.10 | 2.25 | 1.09 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, J.; Fan, X.; Wang, S.; Ren, Y. Optimization-Based Wi-Fi Radio Map Construction for Indoor Positioning Using Only Smart Phones. Sensors 2018, 18, 3095. https://doi.org/10.3390/s18093095
Tan J, Fan X, Wang S, Ren Y. Optimization-Based Wi-Fi Radio Map Construction for Indoor Positioning Using Only Smart Phones. Sensors. 2018; 18(9):3095. https://doi.org/10.3390/s18093095
Chicago/Turabian StyleTan, Jian, Xiangtao Fan, Shenghua Wang, and Yingchao Ren. 2018. "Optimization-Based Wi-Fi Radio Map Construction for Indoor Positioning Using Only Smart Phones" Sensors 18, no. 9: 3095. https://doi.org/10.3390/s18093095
APA StyleTan, J., Fan, X., Wang, S., & Ren, Y. (2018). Optimization-Based Wi-Fi Radio Map Construction for Indoor Positioning Using Only Smart Phones. Sensors, 18(9), 3095. https://doi.org/10.3390/s18093095