Optimization of Sparse Planar Arrays with Minimum Spacing and Geographic Constraints in Smart Ocean Applications

{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
2.1. Sparse Planar Arrays
2.2. Cost Function
2.3. Constraints
3. Constrained Optimization via Simulated Annealing
3.1. Implementation of Constraints in Optimization
| Algorithm 1. Implementation of Geographic Constraint |
| 1 for to do |
| 2 for to do |
| 3 if and then |
| 4 |
| 5 if then |
| 6 |
| 7 end if |
| 8 end if |
| 9 end for |
| 10 end for |
3.2. Optimization via Simulated Annealing
| Algorithm 2. Optimization via Simulated Annealing |
| Initialization: , , , |
| 1 , , compute as in Equation (5) with and |
| 2 for to do |
| 3 for to do |
| 4 |
| 5 |
| 6 , , compute as in Equation (5) with and |
| 7 |
| 8 if then |
| 9 , , , , |
| 10 else |
| 11 |
| 12 if then |
| 13 , , , , |
| 14 end if |
| 15 end if |
| 16 end for |
| 17 , , , , |
| 18 |
| 19 end for |
| 20 , |
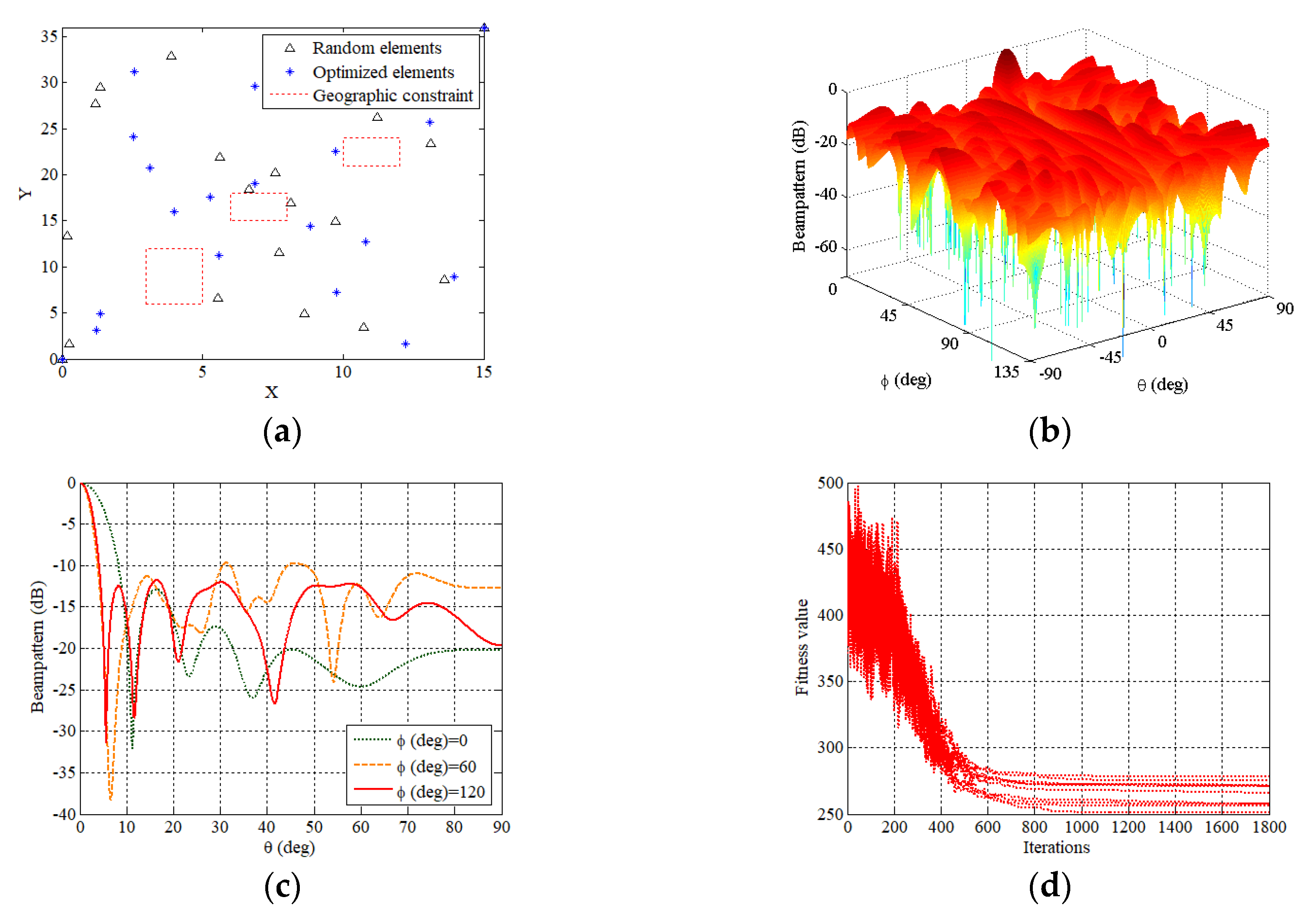
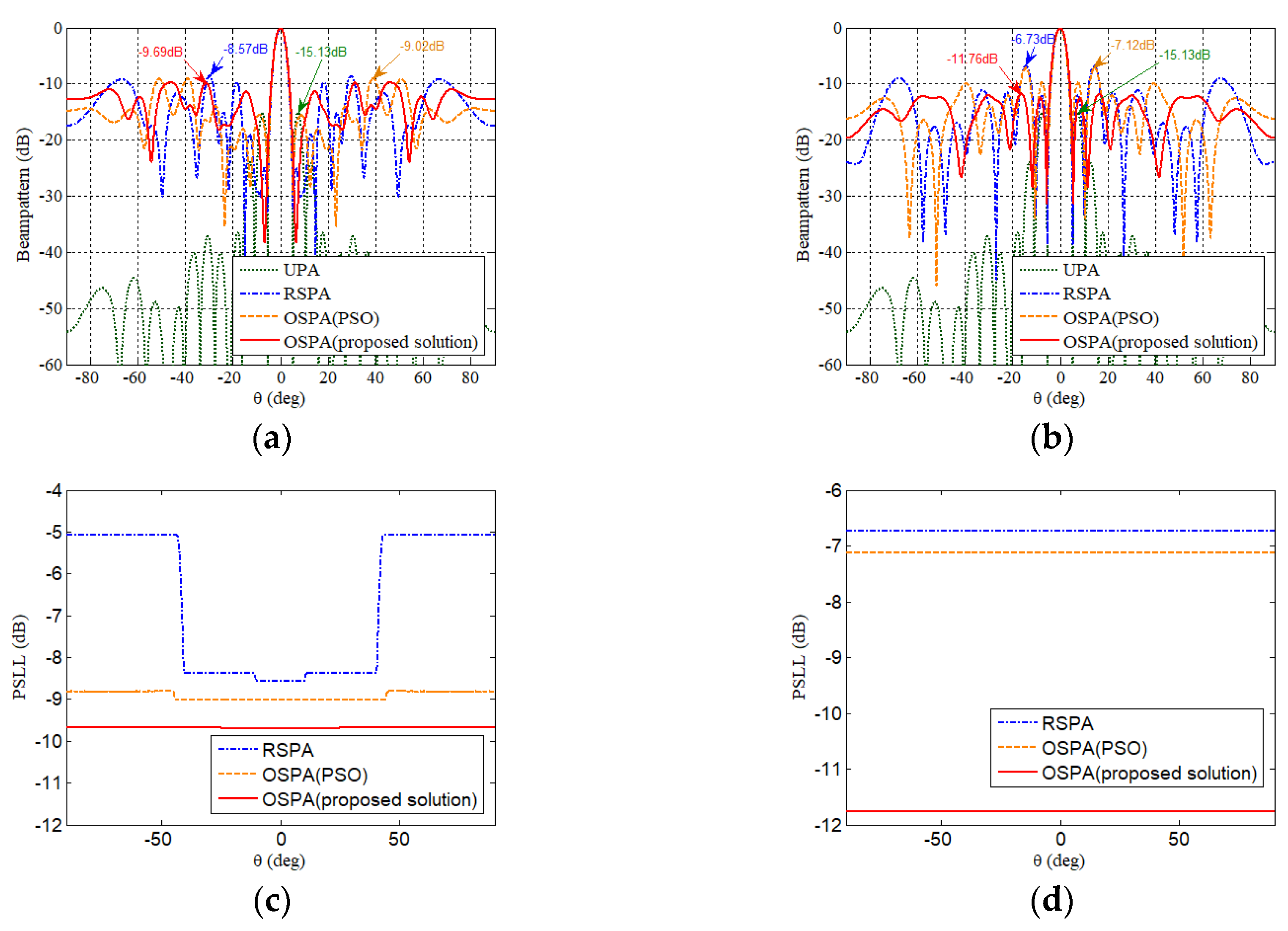
4. Simulation Results
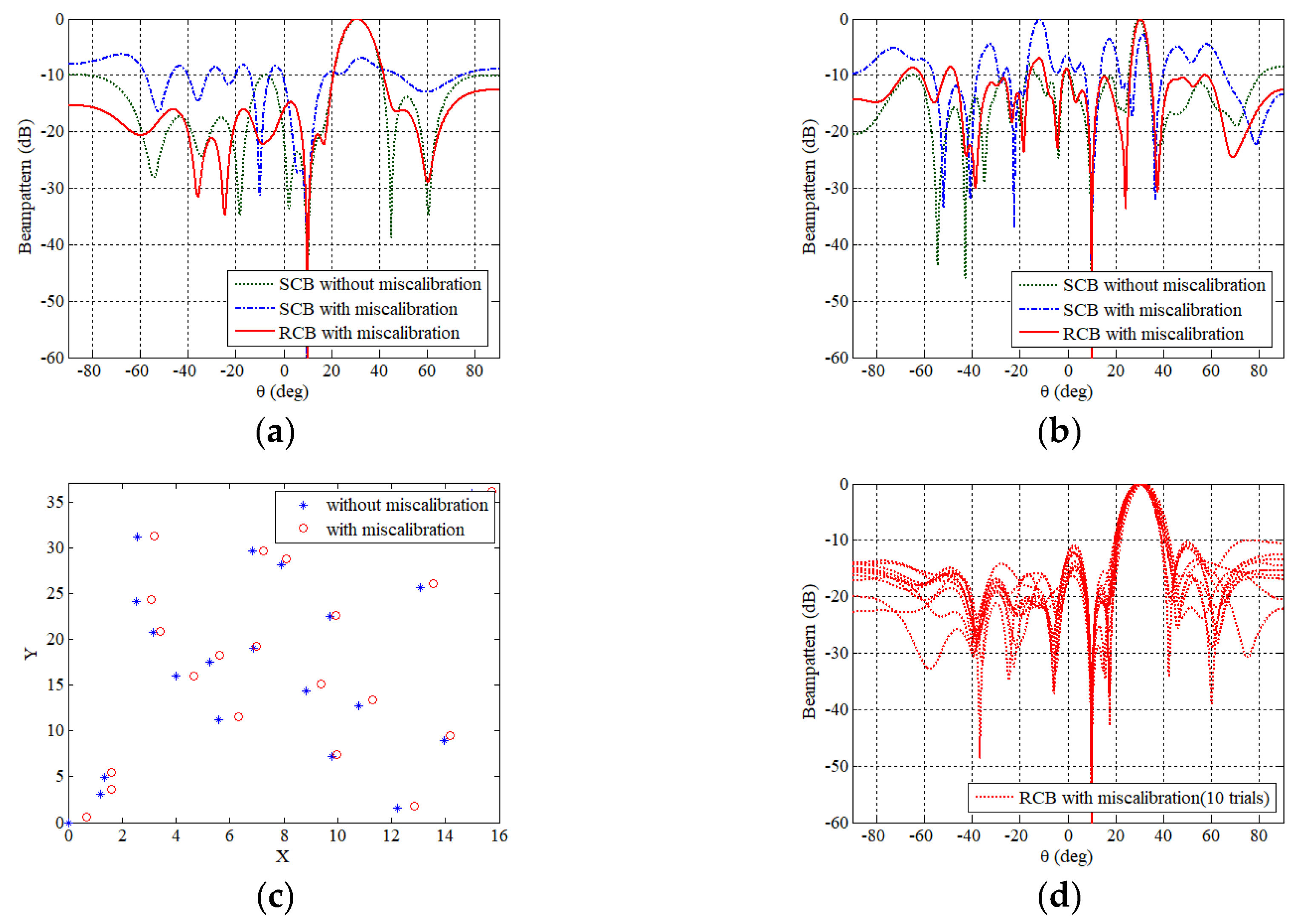
5. Robustness of a Deployment-Optimized SPA
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Song, H.; Cho, S.; Kang, T.; Hodgkiss, W.; Preston, J. Long-range acoustic communication in deep water using a towed array. J. Acoust. Soc. Am. 2011, 129, 71–75. [Google Scholar] [CrossRef] [PubMed]
- Makris, N.C.; Ratilal, P.; Symonds, D.T.; Jagannathan, S.; Lee, S.; Nero, R.W. Fish population and behavior revealed by instantaneous continental shelf-scale imaging. Science 2006, 311, 660–663. [Google Scholar] [CrossRef]
- Huang, W.; Wang, D.; Garcia, H.; Godø, O.R.; Ratilal, P. Continental shelf-scale passive acoustic detection and characterization of diesel-electric ships using a coherent hydrophone array. Remote Sens. 2017, 9, 772. [Google Scholar] [CrossRef]
- Zhu, C.; Garcia, H.; Kaplan, A.; Schinault, M.; Handegard, N.; Godø, O.; Huang, W.; Ratilal, P. Detection, localization and classification of multiple mechanized ocean vessels over continental-shelf scale regions with passive ocean acoustic waveguide remote sensing. Remote Sens. 2018, 10, 1699. [Google Scholar] [CrossRef]
- Wang, D.; Ratilal, P. Angular resolution enhancement provided by nonuniformly-spaced linear hydrophone arrays in ocean acoustic waveguide remote sensing. Remote Sens. 2017, 9, 1036. [Google Scholar] [CrossRef]
- Trucco, A.; Martelli, S.; Crocco, M. Passive underwater imaging through optimized planar arrays of hydrophones. In Proceedings of the 2014 Oceans-St. John’s Conference, St. John’s, NL, Canada, 14–19 September 2014. [Google Scholar]
- Han, G.; Qian, A.; Zhang, C.; Wang, Y.; Rodrigues, J.J. Localization algorithms in large-scale underwater acoustic sensor networks: A quantitative comparison. Int. J. Distrib. Sens. Netw. 2014, 10, 379382. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Xu, Y.; Wang, F. Localization algorithms of underwater wireless sensor networks: A survey. Sensors 2012, 12, 2026–2061. [Google Scholar] [CrossRef]
- Han, G.; Li, S.; Zhu, C.; Jiang, J.; Zhang, W. Probabilistic neighborhood-based data collection algorithms for 3D underwater acoustic sensor networks. Sensors 2017, 17, 316. [Google Scholar] [CrossRef]
- Busby, D. Hierarchical adaptive experimental design for Gaussian process emulators. Reliab. Eng. Syst. Saf. 2009, 94, 1183–1193. [Google Scholar] [CrossRef]
- Martino, L.; Vicent, J.; Camps-Valls, G. Automatic emulator and optimized look-up table generation for radiative transfer models. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Khodier, M.M.; Christodoulou, C.G. Linear array geometry synthesis with minimum sidelobe level and null control using particle swarm optimization. IEEE Trans. Antennas Propag. 2005, 53, 2674–2679. [Google Scholar] [CrossRef]
- Bhattacharya, R.; Bhattacharyya, T.K.; Garg, R. Position mutated hierarchical particle swarm optimization and its application in synthesis of unequally spaced antenna arrays. IEEE Trans. Antennas Propag. 2012, 60, 3174–3181. [Google Scholar] [CrossRef]
- Haupt, R.L. Thinned arrays using genetic algorithms. IEEE Trans. Antennas Propag. 1994, 42, 993–999. [Google Scholar] [CrossRef]
- Yan, K.K.; Lu, Y. Sidelobe reduction in array-pattern synthesis using genetic algorithm. IEEE Trans. Antennas Propag. 1997, 45, 1117–1122. [Google Scholar]
- Cen, L.; Ser, W.; Yu, Z.L.; Rahardja, S. An improved genetic algorithm for aperiodic array synthesis. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008; pp. 2465–2468. [Google Scholar]
- Trucco, A.; Murino, V. Stochastic optimization of linear sparse arrays. IEEE J. Ocean. Eng. 1999, 24, 291–299. [Google Scholar] [CrossRef]
- Lin, J.C.; Ma, X.C.; Yan, S.F.; Jiang, L. Pattern synthesis of sparse linear array by off-grid Bayesian compressive sampling. Electron. Lett. 2015, 51, 2141–2143. [Google Scholar] [CrossRef]
- Schumer, M.A.; Steiglitz, K. Adaptive step size random search. IEEE Trans. Autom. Control 1968, 13, 270–276. [Google Scholar] [CrossRef] [Green Version]
- Martino, L.; Elvira, V.; Luengo, D.; Corander, J.; Louzada, F. Orthogonal parallel MCMC methods for sampling and optimization. Digit. Signal Process. 2016, 58, 64–84. [Google Scholar] [CrossRef] [Green Version]
- Geyer, C.J. Markov Chain Monte Carlo Maximum Likelihood; Interface Foundation of North America: Fairfax Station, VA, USA, 1991. [Google Scholar]
- Hawes, M.B.; Liu, W. Location optimization of robust sparse antenna arrays with physical size constraint. IEEE Antennas Wirel. Propag. Lett. 2012, 11, 1303–1306. [Google Scholar] [CrossRef]
- Hawes, M.B.; Liu, W. Compressive sensing-based approach to the design of linear robust sparse antenna arrays with physical size constraint. IET Microw. Antennas Propag. 2014, 8, 736–746. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Cui, G.; Yang, S.; Kong, L.; Yi, W. Coherent unambiguous transmit for sparse linear array with geography constraint. IET Radar Sonar Navig. 2017, 11, 386–393. [Google Scholar] [CrossRef]
- Yan, C.; Yang, P.; Xing, Z.; Huang, S.Y. Synthesis of planar sparse arrays with minimum spacing constraint. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 1095–1098. [Google Scholar] [CrossRef]
- Pinchera, D.; Migliore, M.D.; Panariello, G. Synthesis of large sparse arrays using IDEA (inflating-deflating exploration algorithm). IEEE Trans. Antennas Propag. 2018, 66, 4658–4668. [Google Scholar] [CrossRef]
- Chen, K.S.; Yun, X.H.; He, Z.S. Synthesis of sparse planar arrays using modified real genetic algorithm. IEEE Trans. Antennas Propag. 2007, 55, 1067–1073. [Google Scholar] [CrossRef]
- Liu, H.; Zhao, H.; Li, W.; Liu, B. Synthesis of sparse planar arrays using matrix mapping and differential evolution. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1905–1908. [Google Scholar] [CrossRef]
- Dai, D.; Yao, M.; Ma, H.; Jin, W.; Zhang, F. An asymmetric mapping method for the synthesis of sparse planar arrays. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 70–73. [Google Scholar] [CrossRef]
- Impagliazzo, J.M.; Kay, S.M.; Chiang, A.M.; Broadstone, S.R. Sparse array technology for 3-D sonar imaging systems. J. Acoust. Soc. Am. 1999, 106, 2296–2297. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Direction-finding with sparse rectangular dual-size spatial invariance array. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1320–1336. [Google Scholar] [CrossRef]
- Cheng, Z.F.; Zhao, Y.B.; Li, H.; Shui, P.L. Two-dimensional DOA estimation algorithm with co-prime array via sparse representation. Electron. Lett. 2015, 51, 2084–2086. [Google Scholar] [CrossRef]
- Long, T.; Zhang, H.; Zeng, T.; Chen, X.; Liu, Q.; Zheng, L. Target tracking using SePDAF under ambiguous angles for distributed array radar. Sensors 2016, 16, 1456. [Google Scholar] [CrossRef] [PubMed]
- Mailloux, R.J. Phased Array Antenna Handbook; Artech House: Norwood, MA, USA, 2017; pp. 12–17. [Google Scholar]
- Salomon, K.B. An efficient point-in-polygon algorithm. Comput. Geosci. 1978, 4, 173–178. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gellatt, C.D., Jr.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Stoica, P. Robust Adaptive Beamforming; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Ma, N.; Goh, J.T. Efficient method to determine diagonal loading value. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing, Hong Kong, China, 6–10 April 2003. [Google Scholar]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, S.; Ge, F.-X.; Yu, X.; Cui, G.; Ma, L. Optimization of Sparse Planar Arrays with Minimum Spacing and Geographic Constraints in Smart Ocean Applications. Sensors 2019, 19, 11. https://doi.org/10.3390/s19010011
Hao S, Ge F-X, Yu X, Cui G, Ma L. Optimization of Sparse Planar Arrays with Minimum Spacing and Geographic Constraints in Smart Ocean Applications. Sensors. 2019; 19(1):11. https://doi.org/10.3390/s19010011
Chicago/Turabian StyleHao, Shijie, Feng-Xiang Ge, Xianxiang Yu, Guolong Cui, and Li Ma. 2019. "Optimization of Sparse Planar Arrays with Minimum Spacing and Geographic Constraints in Smart Ocean Applications" Sensors 19, no. 1: 11. https://doi.org/10.3390/s19010011
APA StyleHao, S., Ge, F. -X., Yu, X., Cui, G., & Ma, L. (2019). Optimization of Sparse Planar Arrays with Minimum Spacing and Geographic Constraints in Smart Ocean Applications. Sensors, 19(1), 11. https://doi.org/10.3390/s19010011